مرحبا
في هذه المقالة ، أود أن أصف عملية تجميع أول روبوت Arduino الخاص بي. ستكون هذه المواد مفيدة للوافدين الجدد الآخرين ، مثلي ، الذين يرغبون في صنع نوع من "النقل الذاتي". المقالة وصف لمراحل العمل مع الإضافات على الفروق الدقيقة المختلفة. يتم توفير رابط إلى الكود الناتج (على الأرجح ليس الأكثر مثالية) في نهاية المقالة.
إلى أقصى حد ممكن شاركت ابني (8 سنوات). ما حدث بالضبط له وما لم يحدث - لهذا سلطت الضوء على جزء من المقال ، ربما شخص ما سيكون في متناول اليد.
الوصف العام للروبوت
أولاً ، بضع كلمات عن الروبوت نفسه (
الفكرة ). لم أكن أريد حقًا جمع شيء نموذجي في البداية. في الوقت نفسه ، كانت مجموعة المكونات قياسية جدًا - الهيكل والمحركات وأجهزة الاستشعار بالموجات فوق الصوتية ومستشعر الخط ومصابيح LED ومكبر الصوت. في البداية ، من "مجموعة الحساء" هذه ، اخترع روبوت يحمي أراضيها. يذهب إلى المتسلل الذي عبر خط الدائرة ، ثم يعود إلى المركز. ومع ذلك ، في هذا الإصدار ، كانت هناك حاجة إلى خط مرسوم ، بالإضافة إلى الرياضيات الإضافية للبقاء باستمرار في الدائرة.
لذلك ، بعد بعض المداولات ، غيّرت الفكرة قليلاً وقررت صنع روبوت "صياد". في البداية ، يستدير لمحوره ، واختيار الهدف (شخص) في مكان قريب. إذا تم اكتشاف "ضحية" ، فإن "الصياد" ينقلب على المتعري وصفارة الإنذار ، ويبدأ الركوب عليها. عندما يتحرك شخص ما / يهرب ، يختار الروبوت هدفًا جديدًا ويتابعه ، وما إلى ذلك. لا يحتاج هذا الروبوت إلى دائرة محدودة ، ويمكن أن يعمل في منطقة مفتوحة.
كما ترون ، هذا يشبه إلى حد كبير لعبة اللحاق بالركب. على الرغم من أنه في النهاية لم يتحول الروبوت إلى السرعة الكافية ، لكنه يتفاعل بصدق مع الأشخاص المحيطين به. يعجب الأطفال خصوصًا (في بعض الأحيان ، يبدو أنهم على وشك الدوس عليه ، فالقلب يتخطى بالفعل ...). أعتقد أن هذا حل جيد لتعميم التصميم الفني.
هيكل الروبوت
لذلك ، قررنا الفكرة ، دعنا ننتقل إلى
التصميم . تتشكل قائمة العناصر من ما ينبغي أن يكون عليه الروبوت. كل شيء واضح تمامًا هنا ، لذلك انظر فورًا إلى الترقيم:
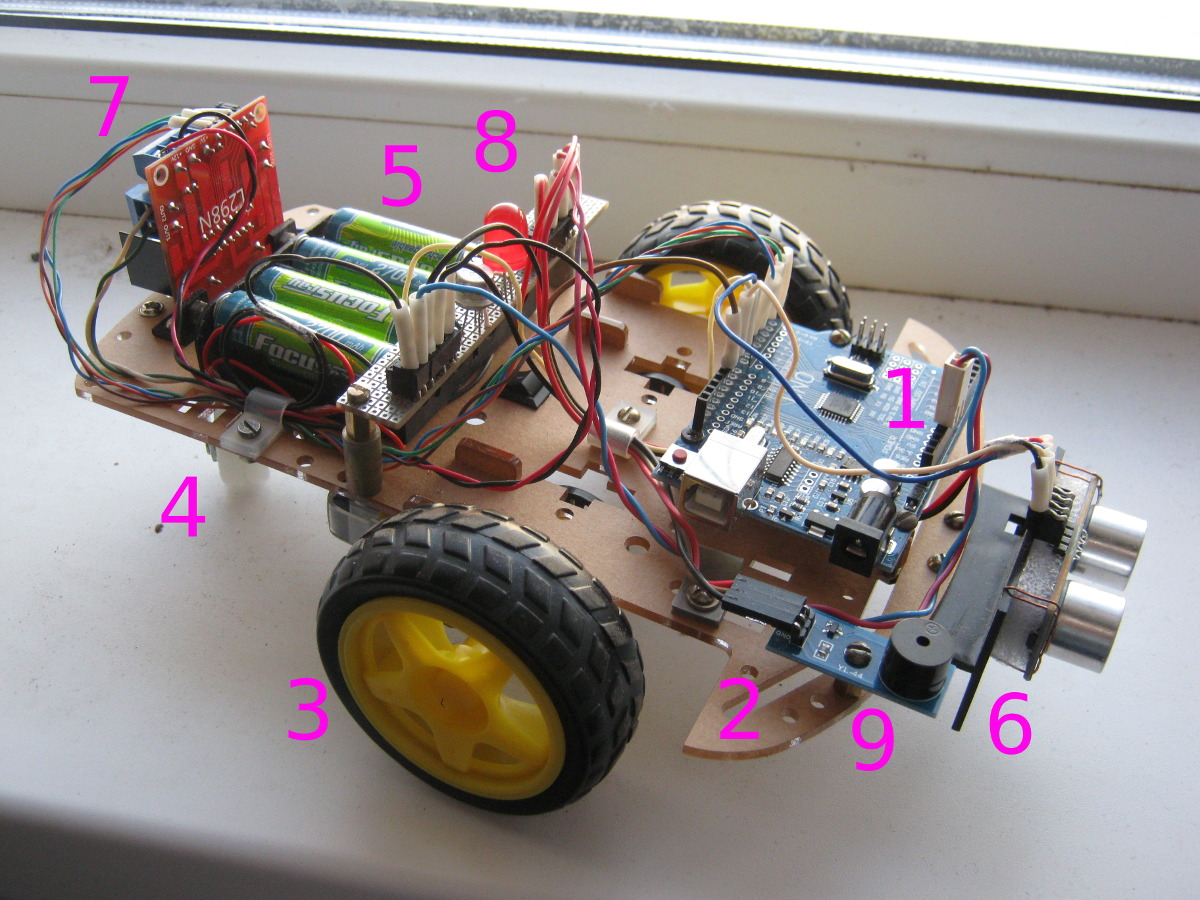
"أدمغة" الروبوت - مجلس اردوينو أونو (1) ؛ كان في مجموعة أمرت من الصين. لأغراضنا ، هذا يكفي (نركز على عدد المسامير المستخدمة). من نفس المجموعة ، أخذنا الهيكل المعدني النهائي (2) ، الذي تعلق عليه عجلتا قيادة (3) وخلفية واحدة (تدوران بحرية) (4). أيضا في المجموعة كان مقصورة البطارية الجاهزة (5). يوجد في مقدمة الروبوت مستشعر بالموجات فوق الصوتية (HC-SR04) (6) ، وفي الخلف يوجد محرك محرك (L298N) (7) ، وفي الوسط يوجد مصباح LED (8) ، والقليل إلى الجانب هو مكبر صوت (9).
في مرحلة البناء ، ننظر إلى:
- بحيث يناسب كل شيء
- أن تكون متوازنة
- أن توضع بعقلانية
جزئيًا ، لقد قام زملاؤنا الصينيون بالفعل بهذا من أجلنا. لذلك ، يتم وضع حجرة البطارية الثقيلة في الوسط ، وتحت عجلات القيادة تقريبًا. جميع اللوحات الأخرى خفيفة الوزن ، ويمكن وضعها على الهامش.
الفروق الدقيقة:
- هناك الكثير من ثقوب المصانع في الهيكل المعدني من المجموعة ، ولكن ما هو المنطق فيها - ما زلت لم أحسبها. تم إصلاح المحركات ومجموعة البطارية دون مشاكل ، ثم بدأ "الملاءمة" بحفر ثقوب جديدة لإصلاح لوحة أو أخرى.
- تم إنقاذ الرفوف النحاسية والسحابات الأخرى من غرف التخزين (في بعض الأحيان كان عليهم الخروج).
- مررت الإطارات من كل لوحة عبر المشابك (مرة أخرى ، وجدت في غرف التخزين). مريحة للغاية ، جميع الأسلاك هي جميلة ولا شنق.
كتل الفردية
الآن سوف أذهب إلى
الكتل وأخبرك شخصيًا عن كل منها.
مقصورة البطاريةمن الواضح أن الروبوت يجب أن يكون لديه مصدر جيد للطاقة. قد تكون الخيارات مختلفة ، اخترت الخيار مع 4 بطاريات AA. في المجموع ، فإنها تعطي حوالي 5 فولت ، ويمكن تطبيق هذا الجهد مباشرة إلى دبوس 5V من لوحة اردوينو (تجاوز المثبت).
بالطبع ، كان لدي بعض الحذر ، ولكن هذا الحل عملي للغاية.
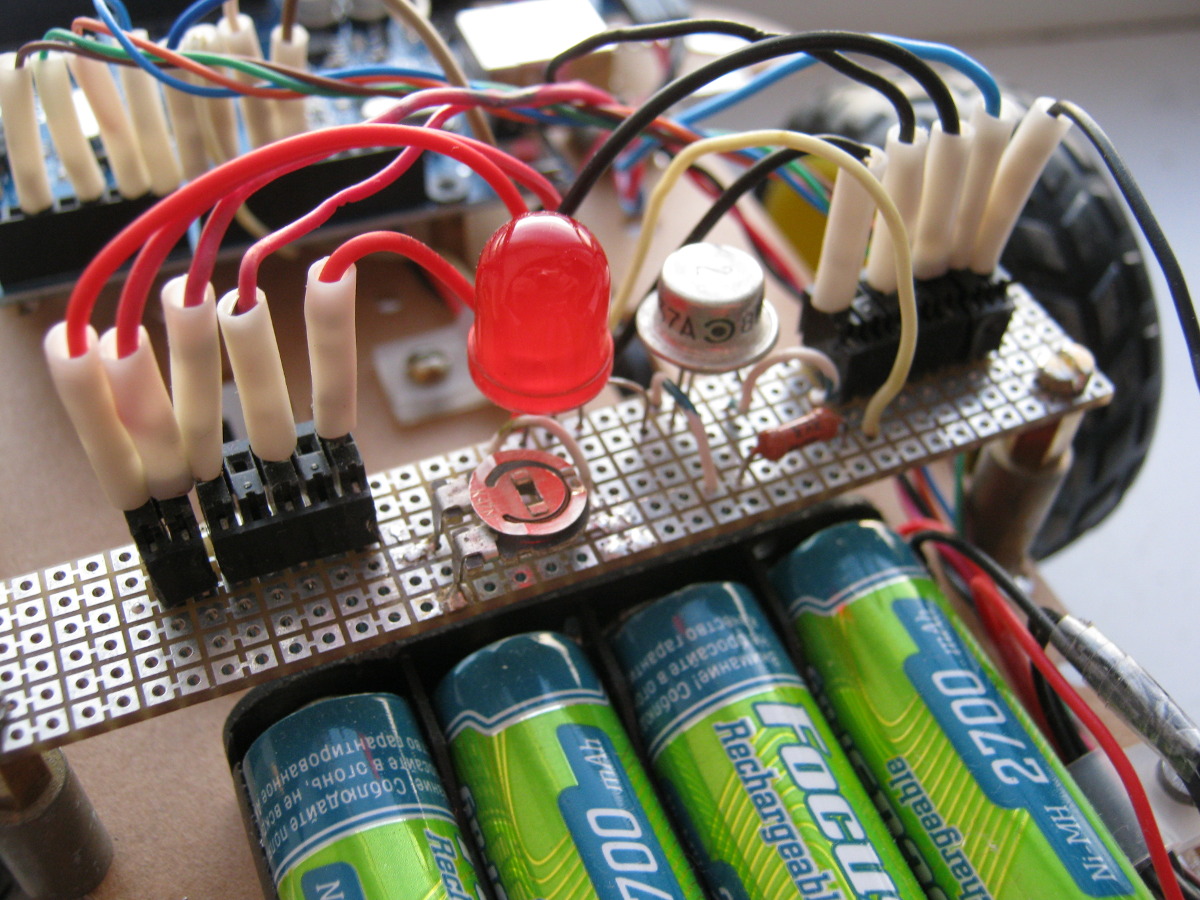
نظرًا لأن الطاقة مطلوبة في كل مكان ، ولتوفير الراحة ، قمت بإنشاء موصلين في وسط الروبوت: أحدهما "يوزع" الأرض (يمين) ، والثاني - 5 فولت (يسار).
 محركات والسائق
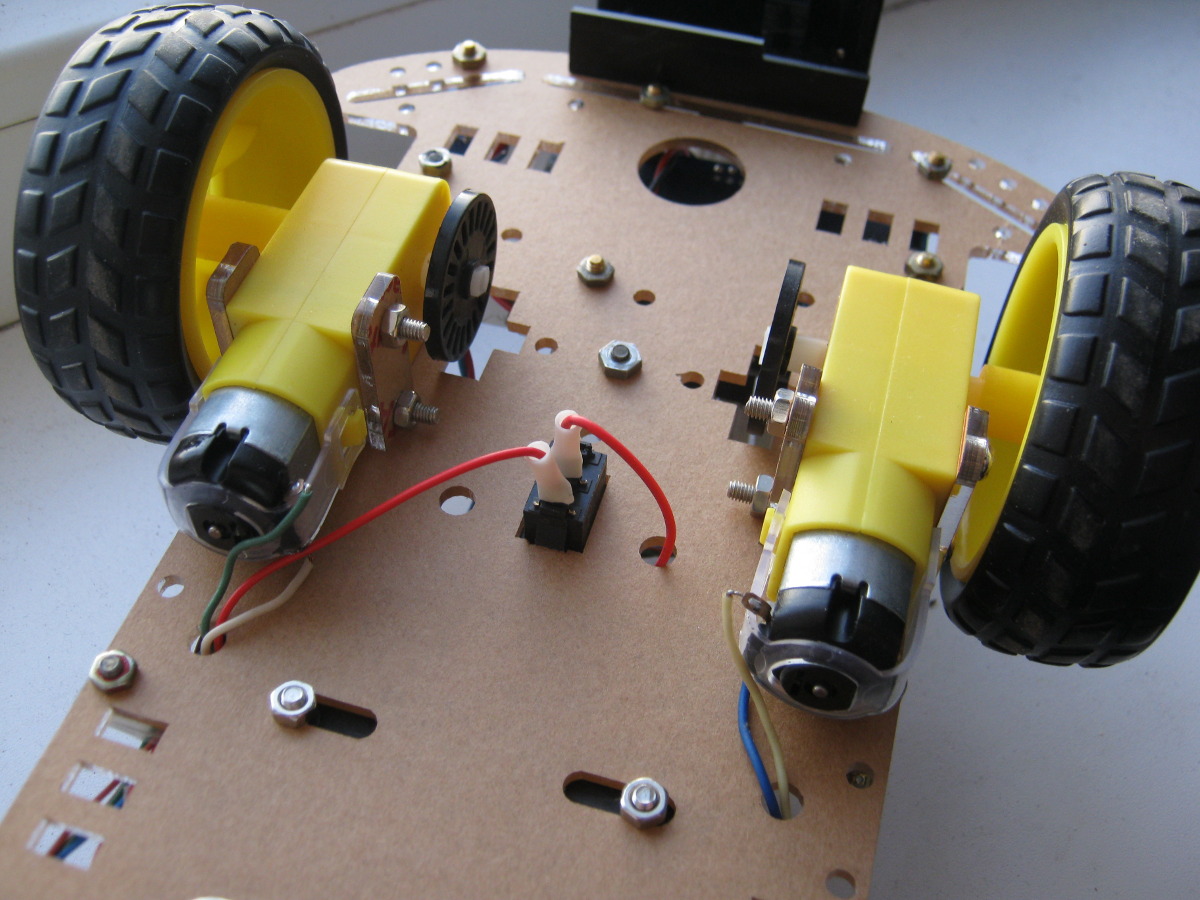
محركات والسائقأولا ، حول محركات التركيب. الحامل مصنع ، ولكنه مصنوع من تحمل كبير. بمعنى آخر ، يمكن للمحركات أن "تمايل" بضعة ملليمترات من اليسار إلى اليمين. بالنسبة لمهمتنا ، هذا ليس بالأمر الحاسم ، ولكن في مكان ما يمكنه التأثير عليه (سيبدأ الروبوت بالرصاص). فقط في حالة ، أنا وضعت محركات متوازية بدقة وثابتة مع الغراء.
للتحكم في المحركات ، كما كتبت أعلاه ، يتم استخدام برنامج التشغيل L298N. وفقا للوثائق ، لديه ثلاثة مسامير لكل محرك: واحد لتغيير السرعة وزوج من المسامير لاتجاه الدوران. هناك نقطة واحدة مهمة. اتضح أنه إذا كان الجهد الكهربائي هو 5 فولت ، فإن التحكم في السرعة ببساطة لا يعمل! وهذا هو ، إما لا تطور على الإطلاق ، أو التحولات إلى أقصى حد. إليكم هذه الميزة ، والتي بسببها "قتلت" بضع أمسيات. في النهاية ، وجدت إشارة في مكان ما في أحد المنتديات.
بشكل عام ، كنت في حاجة إلى سرعة دوران منخفضة عند تشغيل الروبوت - بحيث كان بهامش زمني لمسح المساحة. ولكن ، بما أنه لم يأت شيء من هذه الفكرة ، فقد اضطررت إلى القيام بذلك بطريقة مختلفة: منعطف صغير - إيقاف - إيقاف - توقف ، إلخ. مرة أخرى ، ليست أنيقة بل فعالة.
سأضيف هنا أيضًا أنه بعد كل متابعة ، يحدد الروبوت اتجاهًا عشوائيًا لدوران جديد (في اتجاه عقارب الساعة أو عكس اتجاه عقارب الساعة).
جهاز استشعار بالموجات فوق الصوتية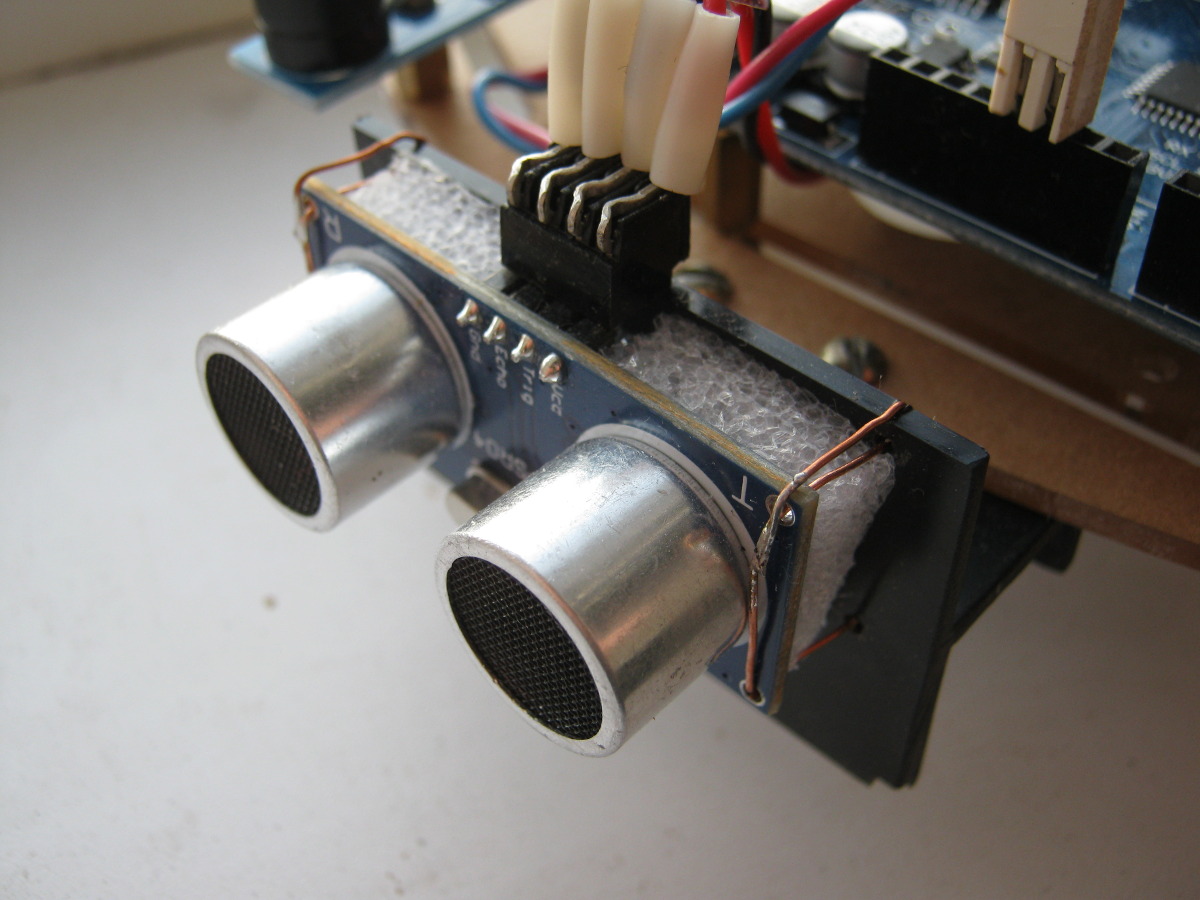
قطعة أخرى من الحديد ، حيث اضطررت للبحث عن حل وسط. جهاز استشعار بالموجات فوق الصوتية على العقبات الحقيقية يعطي أرقام غير مستقرة. في الواقع ، كان متوقعا. من الناحية المثالية ، يعمل في مكان ما في المسابقات حيث توجد أسطح ناعمة ومتناسقة وعمودية ، ولكن إذا "أرجعت" ساق شخص ما أمامه ، فأنت بحاجة إلى تقديم معالجة إضافية.
على هذا النحو ، قمت بتعيين
عامل التصفية المتوسط على ثلاث عينات. استنادًا إلى الاختبارات التي أجريت على أطفال حقيقيين (لم يصب طفل واحد أثناء الاختبارات!) ، اتضح أن ذلك يكفي تمامًا لتطبيع البيانات. الفيزياء هنا بسيطة: لدينا إشارات تنعكس من الأشياء
الضرورية (إعطاء المسافة المطلوبة) وتنعكس من بعيد ، على سبيل المثال ، الجدران. والثانية هي فورة عشوائية في قياسات الشكل 45 ، 46 ،
230 ، 46 ، 46 ، 45 ، 45 ،
310 ، 46 ... إنه مرشحها الوسيط الذي ينقطع.
بعد كل المعالجة ، نحصل على المسافة إلى أقرب كائن. إذا كانت أقل من قيمة عتبة معينة ، فسنقوم بتشغيل المنبه وننتقل مباشرةً إلى "المتسلل".
المتعري وصفارات الإنذارربما أبسط عناصر كل ما سبق. يمكن رؤيتها في الصور أعلاه. لا يوجد شيء للكتابة عن الحديد هنا ، لذلك دعونا الآن ننتقل إلى
الكود .
برنامج الإدارة
لا أرى نقطة كتابة الشفرة بالتفصيل ، من الذي يحتاجها - الارتباط في نهاية المقال ، كل شيء يمكن قراءته تمامًا هناك. ولكن الهيكل العام سيكون لطيفا لشرح.
أول شيء كان علي فهمه: الروبوت هو جهاز في الوقت الفعلي. بتعبير أدق ، تذكر ، لأنه من قبل ، والآن ما زلت أعمل الإلكترونيات. هذا يعني أننا ننسى على الفور مكالمة
التأخير () ، والتي نحب استخدامها في الرسوم الأولية ، والتي ببساطة "تجمد" البرنامج لفترة زمنية محددة. بدلاً من ذلك ، كما ينصح الأشخاص ذوي الخبرة ، نقدم أجهزة ضبط الوقت لكل كتلة. لقد مر الفاصل الزمني المطلوب - قاموا بإجراء (زيادة سطوع مؤشر LED ، وتشغيل المحرك ، وما إلى ذلك).
مؤقتات قد تكون مترابطة. لذلك ، على سبيل المثال ، مكبر الصوت يعمل بشكل متزامن مع المتعري. هذا يجعل البرنامج أسهل قليلا.
بطبيعة الحال ، نقسم كل شيء إلى وظائف منفصلة (المتعري ، الصوت ، الدوران ، حركة الأمام ، وهلم جرا). إذا لم تقم بذلك ، فلن تفهم ما الذي يأتي منه أو من أين.
الفروق الدقيقة في التربية
كل ما تم وصفه أعلاه ، فعلت في وقت فراغي في المساء. في وضع مهل ، قضيت حوالي ثلاثة أسابيع على الروبوت. قد يكون هذا قد انتهى ، لكنني وعدت أيضًا بإخبارك عن العمل مع طفل. ما هو ممكن في هذا العصر؟
العمل على التعليماتقمنا أولاً بفحص كل جزء على حدة - المصابيح ، ومكبرات الصوت ، والمحركات ، وأجهزة الاستشعار ، وما إلى ذلك. هناك عدد كبير من الأمثلة الجاهزة - بعضها مباشرة في بيئة التطوير ، والبعض الآخر يمكن العثور عليه على الإنترنت. هذا مما لا شك فيه ارضاء. نحن نأخذ الرمز ، ونربط الجزء ، ونتأكد من أنه يعمل ، ثم بدأنا بالفعل في التغيير لمهمتنا. الاتصالات وفقًا للمخطط وتحت سيطرتي ، يصنع الطفل نفسه. هذا جيد يجب أن تكون قادرًا على العمل بوضوح وفقًا للتعليمات.
ترتيب العمل ("من القطاع الخاص إلى العام")هذه نقطة صعبة. من الضروري تعليم أن مشروعًا كبيرًا ("صنع روبوت") يتكون من مهام صغيرة ("توصيل جهاز استشعار" ، "توصيل محركات" ...) ، وهذه بدورها تتكون من خطوات أصغر ("العثور على برنامج" ، " قم بتوصيل اللوحة "،" تنزيل البرامج الثابتة "...). أداء مهام أكثر أو أقل مفهومة من المستوى الأدنى ، نحن "إغلاق" مهام المستوى المتوسط ، والنتيجة العامة تتكون بالفعل منهم. وأوضح ، ولكن ، أعتقد أن الوعي لن يأتي قريبًا. في مكان ما ، على الأرجح ، إلى المراهقة.
التثبيتالحفر ، المواضيع ، مسامير ، المكسرات ، لحام ورائحة الصنوبري - حيث دون ذلك. تلقى الطفل المهارة الأساسية "العمل باستخدام مكواة لحام" - تمكنت من لحام عدة مفاصل (لقد ساعدت قليلاً ، لن أخفيها). لا تنس تفسير السلامة.
عمل الكمبيوتركتبت برنامجًا للروبوت ، لكنني تمكنت من تحقيق نوع من النتائج المرتبطة به.
أولاً: الإنجليزية. لقد بدأت للتو في المدرسة ، لذلك "صريرنا" رتبنا ما هي pishalka ، migalka ، yarkost والترجمات الأخرى. لقد فهمنا ذلك على الأقل. لم أكن أستخدم كلماتي الإنجليزية الأصلية عن عمد ، لأننا لم نصل إلى هذا المستوى بعد.
ثانيا: العمل الفعال. لقد علموا مجموعات المفاتيح الساخنة كيفية تنفيذ العمليات النموذجية بسرعة. بشكل دوري ، عندما كتبوا البرنامج ، قمنا بتغيير الأماكن مع ابني ، وقلت ما يجب القيام به (الاستبدال ، البحث ، إلخ). اضطررت للتكرار مرارًا وتكرارًا: "انقر نقرًا مزدوجًا" ، و "اضغط على مفتاح Shift" ، و "اضغط على مفتاح Ctrl" ، وما إلى ذلك. عملية التعلم هنا ليست سريعة ، لكنني أعتقد أن المهارات ستوضع تدريجياً.
النص المخفييمكنك القول أن ما سبق هو واضح تقريبا. لكن بصراحة ، أتيحت لي في خريف هذا العام الفرصة لأجري علوم الكمبيوتر في الصف التاسع في نفس المدرسة. هذا رعب. لا يعرف التلاميذ أشياء أساسية مثل Ctrl + Z و Ctrl + C و Ctrl + V ، واختيار النص بنقرة Shift أو النقر المزدوج على كلمة وأكثر. هذا على الرغم من حقيقة أنهم كانوا في السنة الثالثة من دراستهم في علوم الكمبيوتر ... ارسم خاتمة نفسك.
ثالثا: لمس الكتابة. أنا أوكلت التعليقات في الكود للطفل المكتوب (دعه يمارس). ضع اليد اليمنى على الفور حتى تتذكر الأصابع تدريجياً موقع المفاتيح.
كما ترون ، ما زلنا مجرد بداية. سنقوم بصقل مهاراتنا ومعرفتنا بشكل أكبر وسنكون مفيدين في الحياة.
بالمناسبة ، عن احتمال ...
مزيد من التطوير
يتكون الروبوت ، وركوب الخيل ، يومض والصرير. ماذا الان؟ مستوحاة من ما تم تحقيقه ، نحن نخطط لتحسينه. هناك فكرة لجعل جهاز التحكم عن بعد - مثل روفر القمر. سيكون من المثير للاهتمام ، عند الجلوس على وحدة التحكم الشرطية ، التحكم في حركة الروبوت ، الذي ينتقل في مكان مختلف تمامًا. ولكن هذه ستكون قصة مختلفة ...
وفي النهاية ، في الواقع ، أبطال هذه المقالة (فيديو عن طريق النقر):

شكرا لاهتمامكم!
→
رابط إلى الرمز