تجربة الفكر
تخيل أنك استيقظت في غرفة غريبة. هذه ليست غرفة نوم مريحة تغفو فيها ، ولكنها خلية مضاءة بشكل خفيف مع أرضية رطبة باردة. الجص متصدع على الجدران. ومن المفترض أن المدخل الوحيد والخروج هو باب حديدي ضخم ، مغلق بقفل من الداخل. أعلى قليلاً على الحائط عبارة عن نافذة محظورة تسمح بمرور بعض الضوء. إذا نظرت من حولك فسيتوصل إلى نتيجة مفادها أنك محاصر ، فسيكون ذلك معقولًا تمامًا. يبدو مروعا.
ولكن هل يرضيك؟ ربما لا. قد ترغب في استكشاف الغرفة أكثر من ذلك بقليل ، وربما اسحب القفل لتجربة موثوقيته. أو ترغب في اختبار قوة هذه الجدران الجصية. ربما بضع ضربات صعبة وقمت بعمل ثقب يمكنك من خلاله الخروج؟ أو ربما هذه الشبكات على النافذة لديها فتحات كبيرة بحيث يمكنك الخروج منها؟ يمنحك التفاعل مع البيئة معلومات أكثر بكثير من الملاحظة السلبية لها. قد تكون الرؤية فرضية ، لكن اختبارها يتطلب تفاعلًا حقيقيًا مع البيئة.
مفهوم المفاهيم
المحتوى والاستنتاج مفاهيم.
الكلب هو أيضا مفهوم. وكذلك
الجري والغابات والجمال أو
الموت . المفاهيم هي التجريدات التي نميزها عن التفاعل اليومي مع العالم. إنها تشكل اللبنات الأساسية القابلة لإعادة الاستخدام للمعرفة التي يحتاجها الناس لفهم العالم.
عندما يكون لدينا فهم مفهومي لشيء ما ، فهذا يعني أن لدينا بعض الخبرة في هذا الشيء ، فنحن نتقن ذلك بطريقة أو بأخرى. في حالة المحتوى ، تعني هذه التجربة أنه يمكننا تحديد كائنات حاوية في العالم يمكن أن تحتوي على شيء ، وفصلها عن "غير حاويات" ، ووضع بعض الأشياء في الداخل ، واستعادتها ، وتوقع ما سيحدث ، إذا كنا سوف تتفاعل معهم بطريقة أو بأخرى. يمكننا حتى النظر إلى أشياء جديدة وفهم ما إذا كان من المحتمل أن تحتوي على شيء في حد ذاته أو العكس - ما إذا كان يمكن تضمينها في موضوع آخر.
يبدو أن النهج الرئيسية لفهم المفاهيم في الذكاء الاصطناعى ، بما في ذلك أنظمة التعلم العميق المدربة على
مجموعات البيانات مثل
ImageNet ، لديها بعض من هذه القدرات ، لكنها تفتقر إلى فهم أعمق - التجربة التي تأتي من التفاعل. من خلال إدراك صورة أو حتى فيديو ، قد تتمكن هذه الطرق من تحديد ما إذا كان هناك نوع معين من "الحاوية" عليها ، على سبيل المثال ، فنجان أو منزل أو زجاجة ، وأيضًا لتحديد مكان وجود هذا الكائن في الصورة. لكن من المؤكد أنها ستفشل عندما تصادف نوعًا غير مستكشَف من هذا الكائن. إن طلب وضع نفسه في مكان ما لن يؤدي إلا إلى سوء فهم كامل في مثل هذا النظام ، لأنه يرتبط بمفهوم الكائن الحاوي بمجموعة من العلامات المرئية ، ولكن لا يوجد لديه فهم نشط لمصطلح المحتوى داخل شيء ما.
مفاهيم من تجربة الحسية
كان هنري بوانكاري من أوائل من شددوا على دور التمثيل الحسي في فهم الإنسان. في كتابه "العلم والافتراض" ، جادل بأن كائنًا حيويًا لا يمكن أبدًا أن يتقن مفهوم الفضاء ثلاثي الأبعاد. منذ وقت ليس ببعيد ، اقترح العديد من العلماء الإدراكيين أن التمثيلات المفاهيمية تنشأ من تكامل الإدراك والحركة. على سبيل المثال ، يعرف
O'Regan و Noë تجربة
الحواس بأنها "بنية قاعدة تحدد التغيرات الحسية الناتجة عن مختلف الإجراءات الحركية" ، والملاحظة السلبية بأنها "وسيلة لاستكشاف العالم الذي يعتمد على معرفة تجربة الحواس". يضيف
نو أن "المفاهيم هي نوع من النهج لإدارة ما هو موجود".
على الرغم من حقيقة أن أهمية تجربة الحواس كانت موضع تقدير داخل المجتمع المعرفي ، فإن هذه الأفكار أدت إلى عدد قليل من النماذج الحسابية المحددة لاستكشاف دورها في تشكيل المفاهيم. في
المقالة التي قدمناها في AAAI-18 ، أظهرنا نموذجًا حسابيًا يستكشف المفاهيم من خلال التفاعل مع البيئة.
ماذا فعلنا
لقد خططنا لتحقيق ودراسة القدرات الرئيسية التي تشكل الفهم المفاهيمي: القدرة على اكتشاف المفهوم بشكل نشط والقدرة على استخلاص النتائج أو التصرف بناءً على هذا المفهوم. بالإضافة إلى ذلك ، أردنا استكشاف الحالات التي تكون فيها القدرات التفاعلية مفضلة على النهج السلبية ، وفهم كيف يمكن لاستخدام المفاهيم البسيطة المدروسة بالفعل أن يساعد في دراسة المفاهيم الأكثر تعقيدًا.
بدأنا بتطوير أرضية تدريب افتراضية خاصة لاستكشاف المفاهيم النشطة ، وهي بيئة نسميها
PixelWorld (متوفرة على
github ). في هذا العالم ، يتم ترتيب الأمور أسهل قليلاً من الواقعية. هذا حقل منفصل ثنائي الأبعاد يحتوي على عامل بكسل وكائن واحد أو أكثر من نوع آخر ، ويتكون أيضًا من وحدات بكسل (على سبيل المثال ، خطوط أو نقاط أو حاويات).
لدى الوكيل تطبيق بسيط إلى حد ما: فهو يدرك فقط مساحة الخلايا 3 × 3 من حوله ويمكنه التحرك لأعلى أو لأسفل أو لليسار أو لليمين أو للتوقف وإرسال بعض المعلومات. يتطلب هذا التنفيذ دراسة حتى الأفكار الأساسية حول العالم ، سواء مفهوم الكائن أو مفهوم مفاهيم التفاعل. على الرغم من حقيقة أن هذا قد يبدو وكأنه حرمان حسي مفرط ، فإن القضاء على الإدراك البصري الغني يسمح لنا بالتركيز على دور تحويل السلوك متعدد الأوجه إلى رؤية ذات مغزى للعالم.
قمنا بتدريب الوكلاء في نوعين مختلفين من المهام. كانت المهمة الأولى هي استكشاف البيئة والإبلاغ إذا كان المفهوم الضروري موجودًا في البيئة. على سبيل المثال ، حاوية. وتم مكافأته إذا كانت الإجابة صحيحة. وكانت المهمة الثانية لاتخاذ إجراءات فيما يتعلق بهذا المفهوم. على سبيل المثال ، ضع نفسك في هذه الحاوية. تم مكافأة هذا إذا كان قد أنجز المهمة بشكل صحيح وأبلغ عنها. لهذا ، استخدمنا التدريب التعزيز.
على سبيل المثال ، علمنا الوكيل تحديد متى تم وضعه في جسم في مستوى أفقي. توضح الرسوم المتحركة أدناه هذا السلوك: يتحقق العامل من وجود جدار على اليمين ، ثم يتحقق مما إذا كان هناك جدار على اليسار. بمجرد اجتياز الاختبارين بنجاح ، ذكر أنه "محتجز".
قمنا بتدريب العميل التالي على فهم نفس الشيء عندما يكون محاطًا بالفعل بكائنين على الجانبين: حاوية صلبة وحاوية بها فتحة. تظهر الرسوم المتحركة أن العامل يدخل في الكائن الصحيح ، ويتحقق مما إذا كانت حاوية صلبة. يكتشف وجود ثقب ثم يصعد إلى الحاوية اليسرى ، مما يشير في النهاية إلى أنه في الحجز.
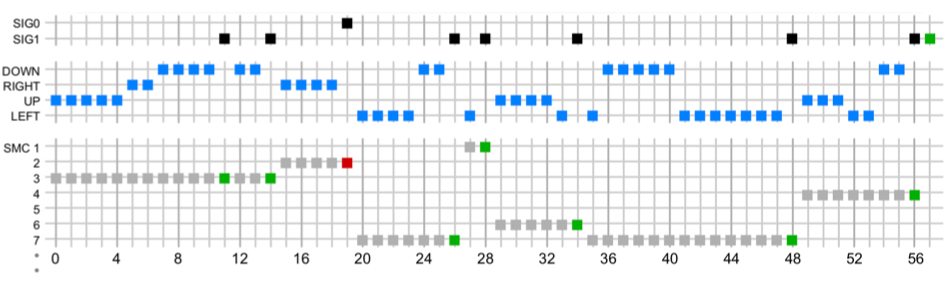
يمكننا أن نفهم بمزيد من التفصيل ما يفعله الوكيل من خلال تحليل سجلات أفعاله:
يوضح الشكل أعلاه كل إجراء يقوم به الوكيل في الرسوم المتحركة الموضحة أعلاه. يمثل كل مربع إجراءً ، ويزيد الوقت من اليسار إلى اليمين. "DOWN" و "RIGHT" و "UP" و "LEFT" هي الإجراءات الرئيسية للوكيل ، ويمثل كل سطر من "SMC" حالة خاصة للتفاعل الحسي يمكن للعامل القيام به. يمكن تمثيل SMC (
الحالات الطارئة الحسية - تقريبًا. ) على أنها برامج صغيرة تستخدم ، عند تنفيذها ، سلسلة من الإجراءات الأساسية حتى يقرر الوكيل إيقاف وإرسال إشارة من إشارتين تعني إما النجاح ("SIG1" ، الأخضر) أو الهزيمة ("SIG0" ، أحمر). نشأ كل من هذه الشركات الصغيرة والمتوسطة كعامل تم تدريبه على حل مشكلة مفاهيمية أبسط. على سبيل المثال ، تم تدريب "SMC 3" على الصعود إلى حاوية إذا كانت مبدئية على الأرض إلى يسارها. وهذا هو أول ما يفعله الوكيل في الرسوم المتحركة من الخطوة 0 إلى 11. وبالتالي ، يمكن للعامل القيام بمهام معقدة ، مثل التوصل إلى استنتاج نهائي حول الاستنتاج ، وتنفيذ سلسلة من الشركات الصغيرة والمتوسطة ذات المستوى المنخفض.
بعد ذلك ، وسعنا مفاهيمنا إلى ما بعد مدة الاستنتاج وأدرجنا مفاهيم مثل كونها على قمة كائن أو على يسار كائنين:
تدريب هذه العوامل في بيئة واحدة فقط لن يكون كافيًا ، لأن فهم جوانب البيئة المتعلقة بالمفاهيم وأيها لا يتطلب الأمر ، هناك حاجة إلى العديد من البيئات المختلفة. يسمح لنا وجود مثل هذه الأنواع المتعددة من البيئات أيضًا بتحديد الأنواع التي يستفيد منها النهج الفعال وإعادة استخدام السلوك الذي تم تطويره مسبقًا من الأساليب السلبية.
لتلبية هذه الحاجة ، طبقنا نوعًا خاصًا من التسجيل استنادًا إلى منطق من الدرجة الأولى لإعداد صفائف البيانات للتجارب ، وذلك باستخدام التعبيرات المنطقية لتوليد الوسائط ولتمييزها فيما يتعلق بالمفهوم الممثّل بداخلها. لقد أنشأنا 96 من هذه الصفائف نظمت في كتل التدريب من المفاهيم البسيطة إلى المعقدة. يتم تضمين كل من نظام التسجيل والبيئات المذكورة أعلاه في إصدار PixelWorld.
ما حصلنا عليه
قارنا نهجنا النشط مع النهج السلبي ، وذلك باستخدام شبكة عصبية تلافيفية ، مدربة على تحديد ما إذا كان المفهوم موجودًا ، استنادًا إلى تصور ثابت للبيئة بأكملها. بالنسبة للمفاهيم التي تستخدم "الاستنتاج" ، يكون النهج التفاعلي أفضل من الشبكة التلافيفية. بالنسبة للمفاهيم التي تتضمن كائنات متنوعة من العديد من الأشكال والعلاقات المكانية ، وجدنا أن شبكة الالتواء عملت بشكل أفضل في بعض الحالات ، ولكنها كانت أسوأ في حالات أخرى. تجدر الإشارة إلى أن النهج السلبية ، بحكم تعريفها ، لا يمكن أن تتفاعل مع البيئة ، لذلك في هذه الحالة فإن الشيء الوحيد الذي يمكن توقعه هو الكشف الثابت عن المفهوم. يمكن فقط لنهجنا الاستباقي أن ينجح في بيئات تتطلب فهم نوع من التفاعل أو العلاقة مع المفهوم.
لقد وجدنا أيضًا أن إعادة استخدام السلوك قد حسنت النتائج لكلتا المهمتين (الاكتشاف والتفاعل) ، مع النتائج الأكثر وضوحًا في تلك الحالات التي تضمنت فيها المفاهيم كائنات متعددة أو تتطلب تسلسلات معقدة في السلوك.
الاستنتاجات
يوضح عملنا أنه يمكن إضفاء الطابع الرسمي على التمثيلات المفاهيمية الحسية التفاعلية واستيعابها. في حين ساعدت التجارب المنعكسة في هذه المقالة على تحديد دور التفاعل بطريقة عامة ، فإن دمجها مع نهج
نظام الرؤية التوليفية يمكن أن يكون مفيدًا لدراسة مفاهيم العالم الحقيقي. علاوة على ذلك ، فإن الجمع بين التمثيل الحسي مع تقنيات مثل "
شبكات المخطط " من شأنه أن يسمح للعامل بالحصول على تمثيل داخلي للعالم الخارجي يمكن استخدامه للمحاكاة والتخطيط.
على الرغم من أن الذكاء الاصطناعي الهارب هو موضوع من الأفضل تركه لأفلام الخيال العلمي ، إلا أننا نعتقد أن استخلاص المفاهيم من تفاعل الحواس هو أحد مفاتيح الانتقال إلى أبعد من تقنيات الذكاء الاصطناعي السلبي الحديثة.