تشهد صناعة السيارات حاليًا ثورة في القيادة المستقلة. يمكن أن توفر مركبة بدون طيار مستوى أعلى من السلامة للركاب ، لأن إدارتها خالية من العامل البشري. الاستخدام الواسع للسيارات غير المأهولة في المستقبل سوف يقلل من عدد الحوادث ، وكذلك يوفر الوقت الذي يقضيه الناس في القيادة اليومية.
يُعد OSCAR (Open-Source CAR) مشروعًا بحثيًا لسيارة StarLine غير المأهولة المصدر ، والتي تجمع بين أفضل العقول الهندسية في روسيا. اتصلنا بمنصة OSCAR لأننا نريد أن نجعل كل سطر من التعليمات البرمجية المتعلقة بالسيارة مفتوحًا للمجتمع.

منصة تشريح
كمستخدم للسيارة ، يرغب صاحب السيارة في الانتقال من النقطة أ إلى النقطة ب بأمان وبشكل مريح وفي الوقت المحدد. تتنوع قصص المستخدمين ، من رحلة إلى العمل أو التسوق وتنتهي مع التسكع مع الأصدقاء أو العائلة دون الحاجة المستمرة إلى متابعة الطريق.
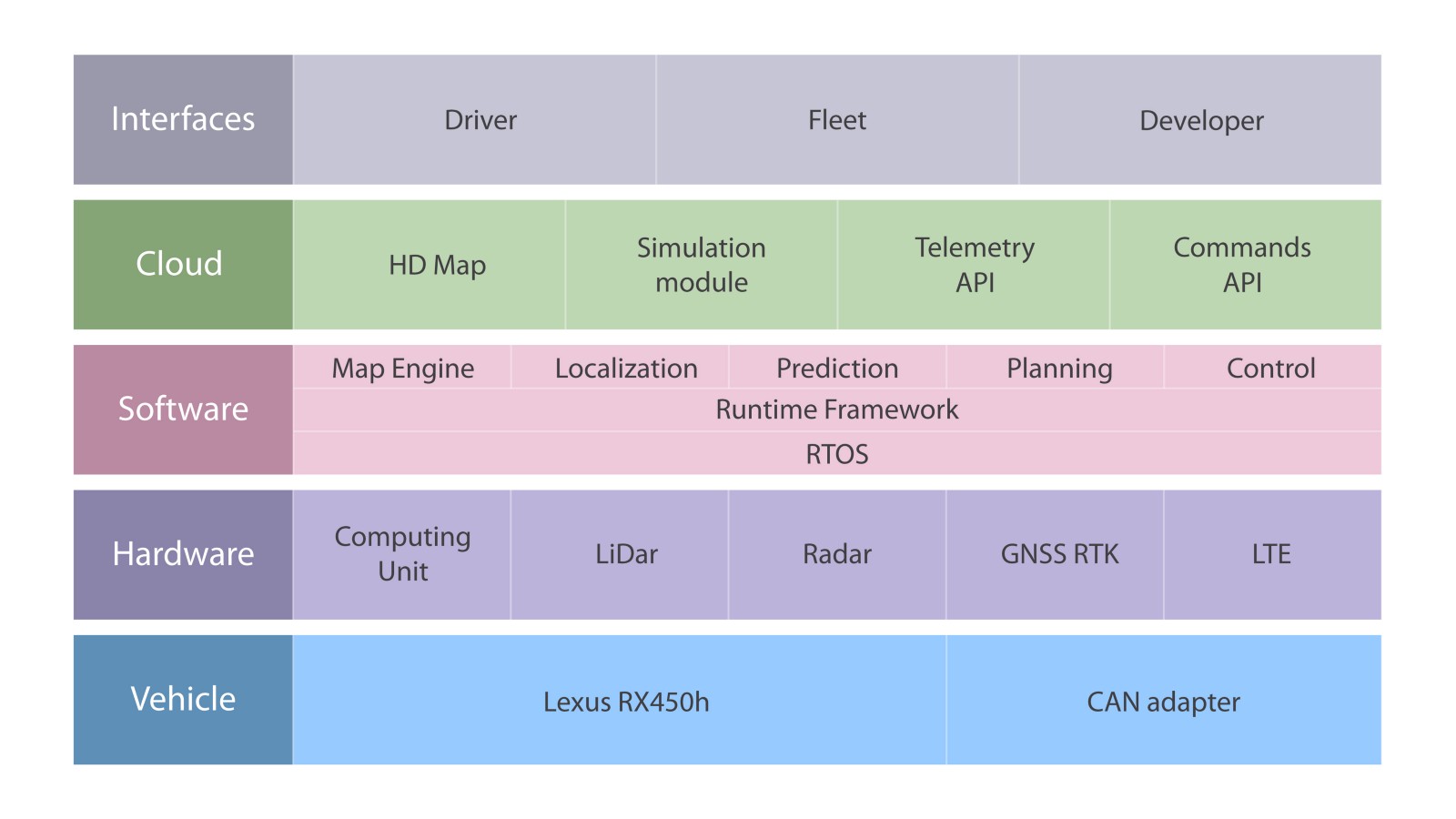
لذلك ، فإن أعلى مستوى في النظام الأساسي هو تطبيقات المستخدم والبيئات. نعتمد على ثلاث مجموعات من المستخدمين: المستخدمون الفرديون ، التجاريون ، وكذلك مطورو الأنظمة الأساسية. لكل من هذه المجموعات اليوم ، نقوم بتصميم واجهة منفصلة. المستوى الثاني هو جزء الخادم ، والذي يتضمن خرائط عالية الدقة ، وحدة محاكاة ، بالإضافة إلى واجهات برمجة التطبيقات التي تخدم السيارة. مستوى البرنامج هو إنشاء البرامج التي سيتم دمجها في السيارة. ويعمل المستويان السفليان من المنصة على السيارة نفسها ، مما يتضمن فحص الواجهة الرقمية للجهاز نفسه وتثبيت المعدات.
سيارة
يمكن أن تحتوي السيارة الحديثة على ما يصل إلى 70 وحدة تحكم إلكترونية لمختلف الأنظمة الفرعية. عادة ما يكون أقوى معالج هو وحدة التحكم في المحرك ، في حين يتم استخدام آخرين للتحكم في ناقل الحركة ، وسائد هوائية ، ونظام الفرامل المانعة للانغلاق ، والأنظمة الصوتية ، وتعديل المرآة ... بعضها يشكّل أنظمة فرعية مستقلة ، بينما يتبادل آخرون المعلومات والأوامر فيما بينهم.
لضمان التواصل بين أجهزة المركبات ، تم تطوير معيار CAN.
CAN-bus هو معيار الشبكة الصناعية ، وكذلك نظام الاتصالات الرقمية والتحكم في الأجهزة الكهربائية للسيارة. يتم توصيل أجهزة السيارات بحافلة CAN بالتوازي لإرسال واستقبال البيانات. بعد الوصول إلى هذه الواجهة الرقمية ، يمكنك على سبيل المثال تشغيل المحرك وفتح الأبواب وطوي مرايا السيارة باستخدام أوامر التحكم.
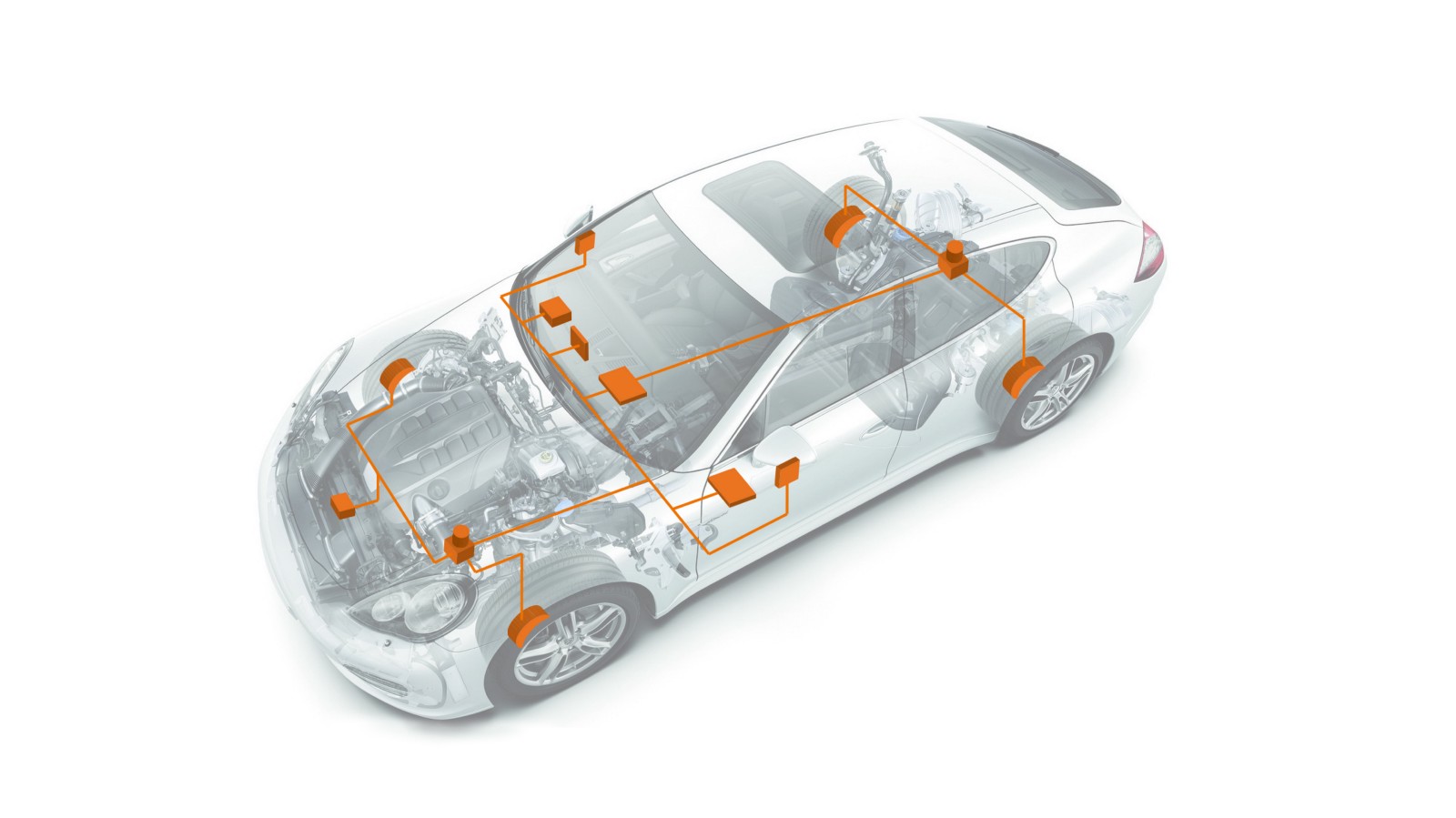
للتحكم في تسارع وتوجيه السيارة ، كنا بحاجة للوصول إلى حافلة CAN وفهم أنواع الرزم المقابلة. NPO StarLine هي شركة تصنيع الأجهزة الإلكترونية ، لذلك قمنا بتطوير محول ناقل CAN الخاص بنا.

حاليا ، يمكننا توجيه والفرامل والتسريع باستخدام جهاز كمبيوتر محمول.

المعدات
يتمثل أحد مجالات العمل المهمة في تزويد السيارة بأجهزة استشعار وأجهزة استشعار. هناك عدد من الطرق لتجهيز مركبة غير مأهولة. على سبيل المثال ، تستخدم بعض الشركات أرفف باهظة الثمن ، بينما ترفضها شركات أخرى ، وتقتصر على قراءات الأجهزة الأخرى.

الآن تم تجهيز سيارة StarLine غير المأهولة بالعديد من الكاميرات أحادية وثنائية العين والرادارات والألياف بالإضافة إلى الملاحة عبر الأقمار الصناعية.
مهمة مستقبل GPS هي تحديد موقعه في الفضاء ، وكذلك الوقت المحدد. أجهزة استقبال GPS المدنية لا تملك دقة كافية لتحديد موقع مركبة بدون طيار ؛ يمكن أن يصل الخطأ إلى عدة أمتار. يحدث هذا بسبب انعكاس الإشارة من جدران المباني في بيئة حضرية ، وبسبب العوامل الطبيعية غير المتوقعة بشكل جيد ، على سبيل المثال ، التغيرات في سرعة إشارة من قمر صناعي في الغلاف الجوي للأرض.
لتحديد موقع مركبة غير مأهولة ، يكون خطأ جهاز استقبال GPS المدني كبيرًا للغاية ، وبالتالي ، في تطويرنا ، نستخدم الملاحة عبر الأقمار الصناعية فائقة الدقة. للقيام بذلك ، تم تثبيت جهاز استقبال GNSS RTK على السيارة ، والذي يستخدم تقنيات أكثر تحديدًا لتحديد المواقع ، وبالتالي لا يحقق دقة تحديد السنتيمتر إلا من خلال الملاحة عبر الأقمار الصناعية.
ولكن أثناء القيادة ، قد تنتهي السيارة في نفق أو تحت جسر ، حيث تكون إشارات الأقمار الصناعية ضعيفة للغاية أو غائبة تمامًا. وبسبب هذا ، ستنخفض دقة مستقبل GNSS-RTK ، أو سيكون تحديد الموقع مستحيلًا تمامًا. في هذه الحالات ، ستقوم السيارة بتحسين موقعها باستخدام قراءات عداد المسافات والتسارع. تسمى الخوارزميات التي تجمع البيانات من عدة مصادر متباينة لتقليل عدم اليقين خوارزميات دمج أجهزة الاستشعار.
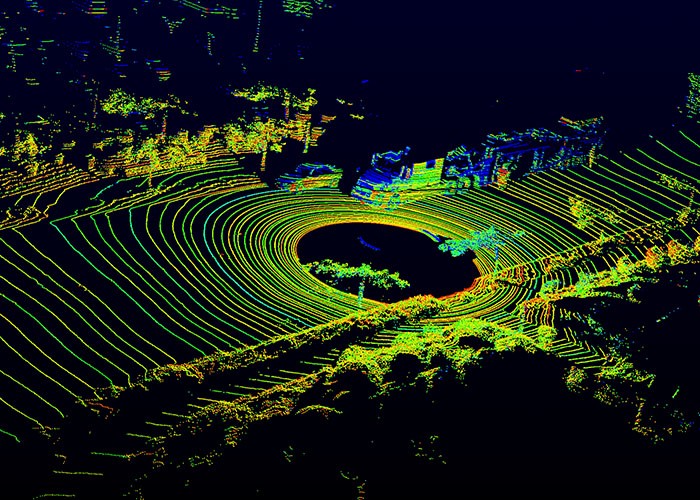
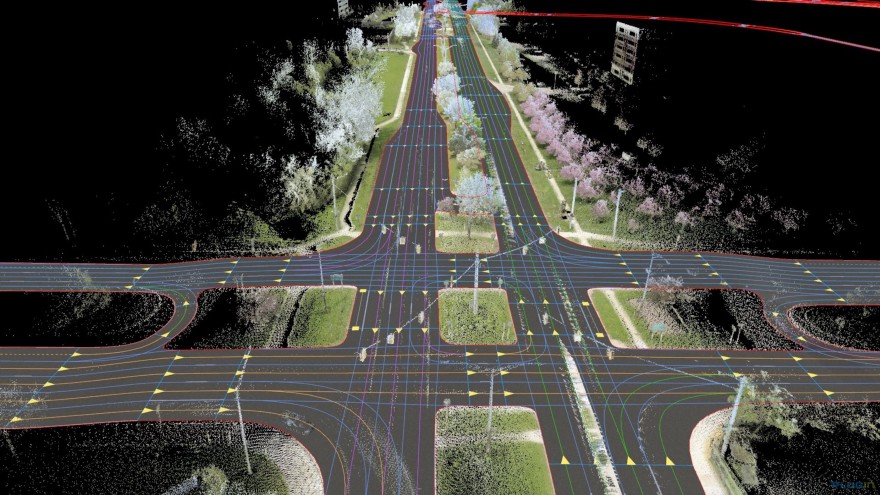
بالإضافة إلى مهمة توطين مركبة غير مأهولة ، يجب أن يكون لديك أيضًا فكرة عن العقبات الديناميكية غير الموجودة على الخريطة ، على سبيل المثال ، السيارات التي تتحرك في مكان قريب أو أشخاص يعبرون الطريق. لهذه الأغراض ، تستخدم مركبة غير مأهولة بيانات الرادار والليدار. يستخدم الرادار موجات الراديو للكشف عن العقبات ، وكذلك بفضل تأثير دوبلر ، يسمح لك بحساب سرعاتها الشعاعية. Lidar هو مكتشف نطاق ضوئي نشط يمسح باستمرار المساحة المحيطة ويشكل خريطته ثلاثية الأبعاد ، ما يسمى سحابة النقطة.
يجب تهيئة كل جهاز يُستخدم في مركبة غير مأهولة (من الكاميرا إلى وحدة RTK GNSS) قبل أن يتم تثبيته.
البرمجيات
على نطاق واسع ، يتكون برنامج الطائرات بدون طيار من عدة وحدات ، بما في ذلك: الاعتراف والتخطيط والتعريب والتحكم.
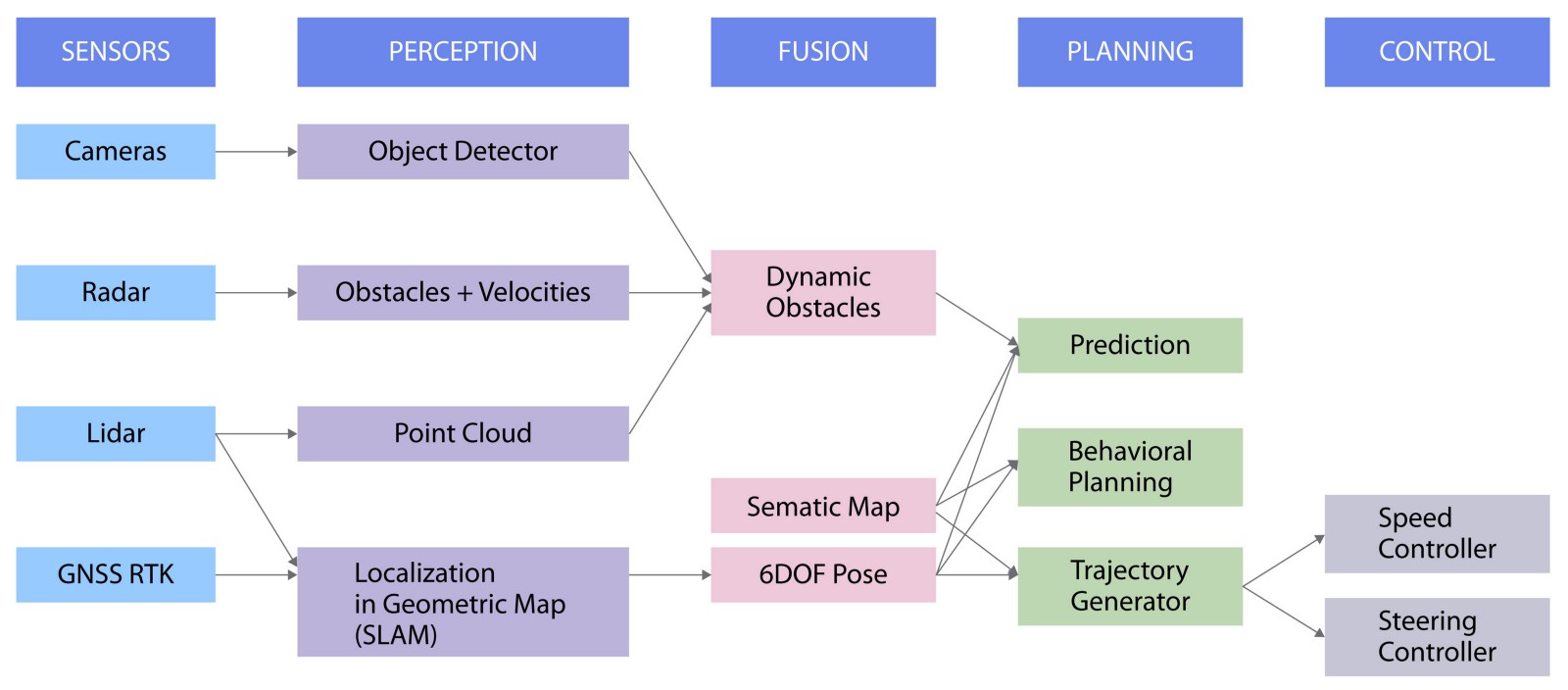
يتم استخدام البيانات من الكاميرات للتعرف على الكائنات والكشف عنها ، وتستقبل الرادارات إحداثيات وسرعات الكائنات المحيطة بها ، وتوفر الأعمدة الخوارزمية مع سحابة نقطة ، وتستخدم وحدة GNSS RTK بيانات القمر الصناعي لتوطين السيارة.
ثم يتم الجمع بين البيانات من المصادر الثلاثة الأولى للحصول على معلومات حول العقبات بالقرب من السيارة.
في الوقت نفسه ، يتم استخدام كل من قراءات الأقمار الصناعية والقمر لحل مشكلة SLAM ، وهو ما يعني توطين التضاريس ورسم خرائطها في وقت واحد. هذه طريقة لإنشاء خريطة لبيئة غير معروفة مع تتبع موقع كائن فيها. تُستخدم هذه المعلومات لحساب الإحداثيات الستة للسيارة ، والتي تشمل ثلاثة إحداثيات مكانية وسرعة ثلاثية الأبعاد.
والخطوة التالية هي التخطيط للمسار المحلي للسيارة. الخطوة الأخيرة هي وحدة التحكم ، والتي يتم استخدامها لتنفيذ المسار الذي تم إنشاؤه أثناء بناء المسار.
حاليًا ، نشارك في إعداد وتثبيت المعدات ونعمل أيضًا على وحدة التحكم في السيارة.
سحابة
يتكون جزء الخادم من أربعة كتل:
- بطاقات HD
- API القياس عن بعد
- API الأوامر
- وحدة المحاكاة
أولاً ، نحتاج إلى تخزين للخرائط لتحديد موقع السيارة بشكل صحيح ، فضلاً عن خدمة القياس عن بُعد لتحليل البيانات. هذا هو مخطط بنية الخادم في وقت مبكر ، والذي يتضمن كتلتين. سنقوم لاحقًا بتوسيعه باستخدام واجهة برمجة تطبيقات الأوامر حتى نتمكن من إرسال أوامر التحكم إلى السيارة من الخادم. سنضيف أيضًا وحدة محاكاة.
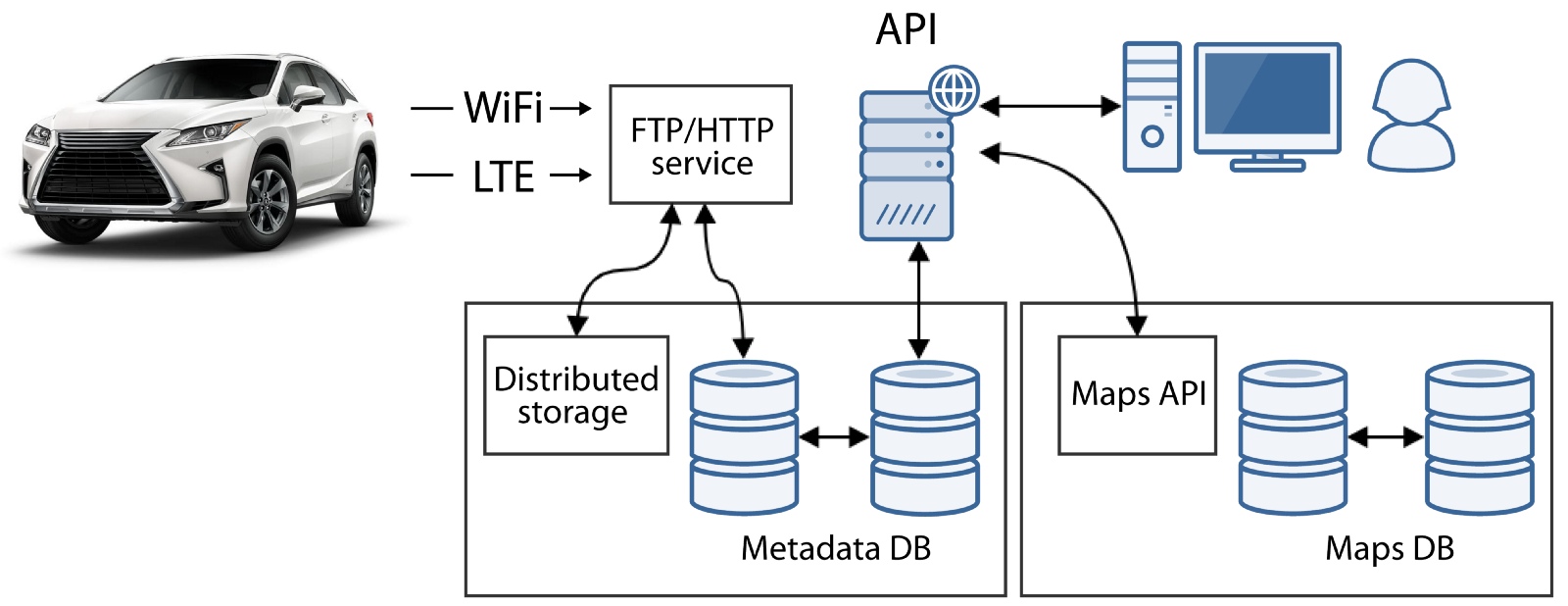
خرائط HD هي خرائط تقدم صورة كاملة عن العالم الواقعي بدقة تبلغ السنتيمتر ، بما في ذلك كل ما يتعلق بالبنية التحتية للطرق ، على سبيل المثال ، معلومات حول الممرات والإشارات وموقع إشارات المرور. قد تحتوي الخريطة أيضًا على بيانات ليد لتمكين الطائرة من توطينها.
هناك حاجة لمحاكاة لإنشاء مواقف حركة المرور لتصحيح الأخطاء والاختبار. من خلال محاكاة المواقف المرورية ، يمكننا زيادة متانة الخوارزميات لدينا من خلال إجراء اختبار الوحدة على عدد تعسفي من الأميال من السيناريوهات القابلة للتخصيص والظروف النادرة ، لجزء بسيط من الوقت والتكلفة التي ستكون مطلوبة للاختبار على الطرق الحقيقية.

خارطة الطريق
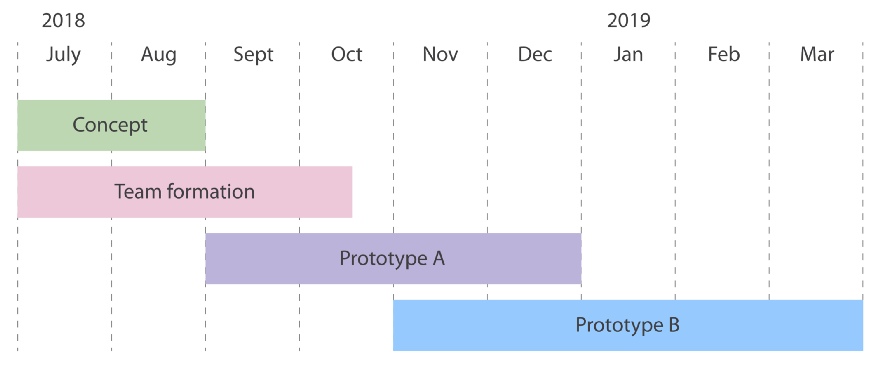
في شهر يوليو ، بدأنا بتطوير مفهوم وإنشاء فريق وبدأنا الطريق إلى النموذج الأولي A. النموذج الأولي A عبارة عن سيارة يمكنها التحرك عبر نقاط الطريق ، ولكنها تتطلب تدخل المشغل لتجنب العقبات. النموذج B ، الذي نخطط لتطويره بحلول ربيع عام 2019 ، هو سيارة يمكنها تجاوز العقبات بدون تحكم السائق.
فماذا تملك طائرة بدون طيار في قلبها؟
تعتمد السيارة على الخوارزميات المتقدمة وتدفقات البيانات والواجهات عالية الأداء والمعدات المتطورة. بالإضافة إلى ذلك ، لا تحتاج السيارة إلى الأجهزة والبرامج فحسب ، بل تحتاج أيضًا إلى تطبيقات الخادم والعميل. هذا القلب التكنولوجي مفتوح ، ولا نعتمد فقط على مبادرة فريق StarLine ، ولكن أيضًا على مساعدة مجتمع المصادر المفتوحة.
الهدف الرئيسي من مركبة StarLine غير المأهولة هو الرغبة في جعل حياة الناس أكثر راحة وأمانًا. التكنولوجيا مهمة بالنسبة لنا ، لكننا نعتقد أن المعرفة التكنولوجية والعلمية موجودة لخدمة الناس ، وهذا هو القلب الحقيقي لجهودنا. نقترب من اليوم الذي سيتم فيه توفير السلامة على الطرق بواسطة المعدات ، وستتاح للناس الفرصة لتخصيص المزيد من الوقت لما هو مهم لهم. وإذا كنت تشاركنا وجهة نظرنا ، فسيسعدنا أن ندعوك للانضمام إلينا في إنشاء تكنولوجيا الغد.
مشروع جيتلاب