في جامعة ITMO ، على أساس قسم نظم التحكم والمعلوماتية (SUII) ، تم افتتاح مختبر الروبوتات. سنخبرنا عن المشاريع التي يتم العمل عليها داخل جدرانها ونعرض الأدوات: أجهزة معالجة الروبوتات الصناعية ، وأجهزة التثبيت الآلية ، بالإضافة إلى تثبيت لاختبار أنظمة تحديد المواقع الديناميكية باستخدام نموذج روبوتي لسفينة سطحية.

التخصص
ينتمي مختبر الروبوتات إلى أقدم قسم بجامعة ITMO ، والذي يسمى "أنظمة التحكم وعلوم الكمبيوتر". ظهرت في عام 1945. تم إطلاق المختبر نفسه في عام 1955 - ثم تناول قضايا أتمتة القياسات وحساب معايير السفن السطحية. في وقت لاحق ، تم توسيع نطاق الاتجاهات: إضافة علم التحكم الآلي ، CAD ، وكذلك الروبوتات.
اليوم ، تقوم المختبرات بتحسين الروبوتات الصناعية. يحل الموظفون المشكلات المتعلقة بالتفاعلات بين الإنسان والآلة - يطورون خوارزميات تحكم آمنة مع التحكم في قوة الروبوت ، ويعملون أيضًا على روبوتات تعاونية يمكنها أداء المهام جنبًا إلى جنب مع الأشخاص.
يطور المختبر أيضًا طرقًا بديلة للتحكم عن بعد لمجموعات الروبوتات ويخلق خوارزميات برامج يمكن إعادة تشكيلها لأداء مهام جديدة عبر الإنترنت.
مشاريع
تم الحصول على عدد من النظم الآلية المختبرية من الشركات الكبيرة وهي مخصصة للأغراض البحثية أو الصناعية. تم تصنيع جزء من المعدات من قبل الموظفين كجزء من البحث والتطوير.
من هذا الأخير ، يمكن التمييز بين
منصة Stuart الآلية ذات درجتين من الحرية. تم تصميم التثبيت الأكاديمي لاختبار خوارزميات التحكم للحفاظ على الكرة في وسط الموقع (يمكنك مشاهدة النظام أثناء
تشغيله في
هذا الفيديو ).
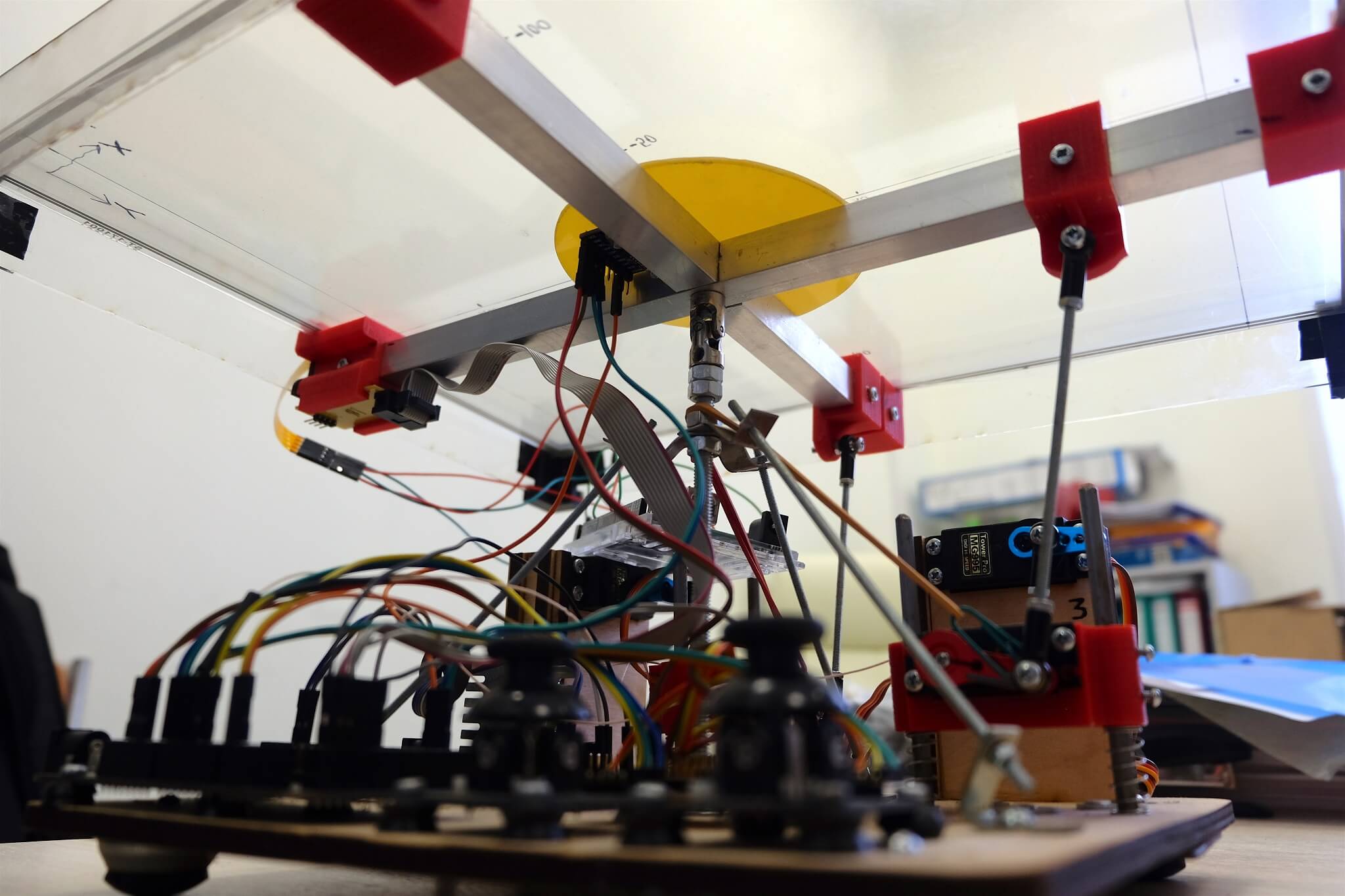
يتكون المجمع الروبوتي من منصة مستطيلة مع ركيزة جهاز استشعار مقاوم يحدد إحداثيات الكرة. يتم إرفاق مهاوي محرك الأقراص به باستخدام وصلة دوارة. تغير محركات الأقراص هذه زاوية المنصة وفقًا لإشارات التحكم المستلمة من الكمبيوتر عبر USB ، ولا تسمح للكرة بالتدحرج.
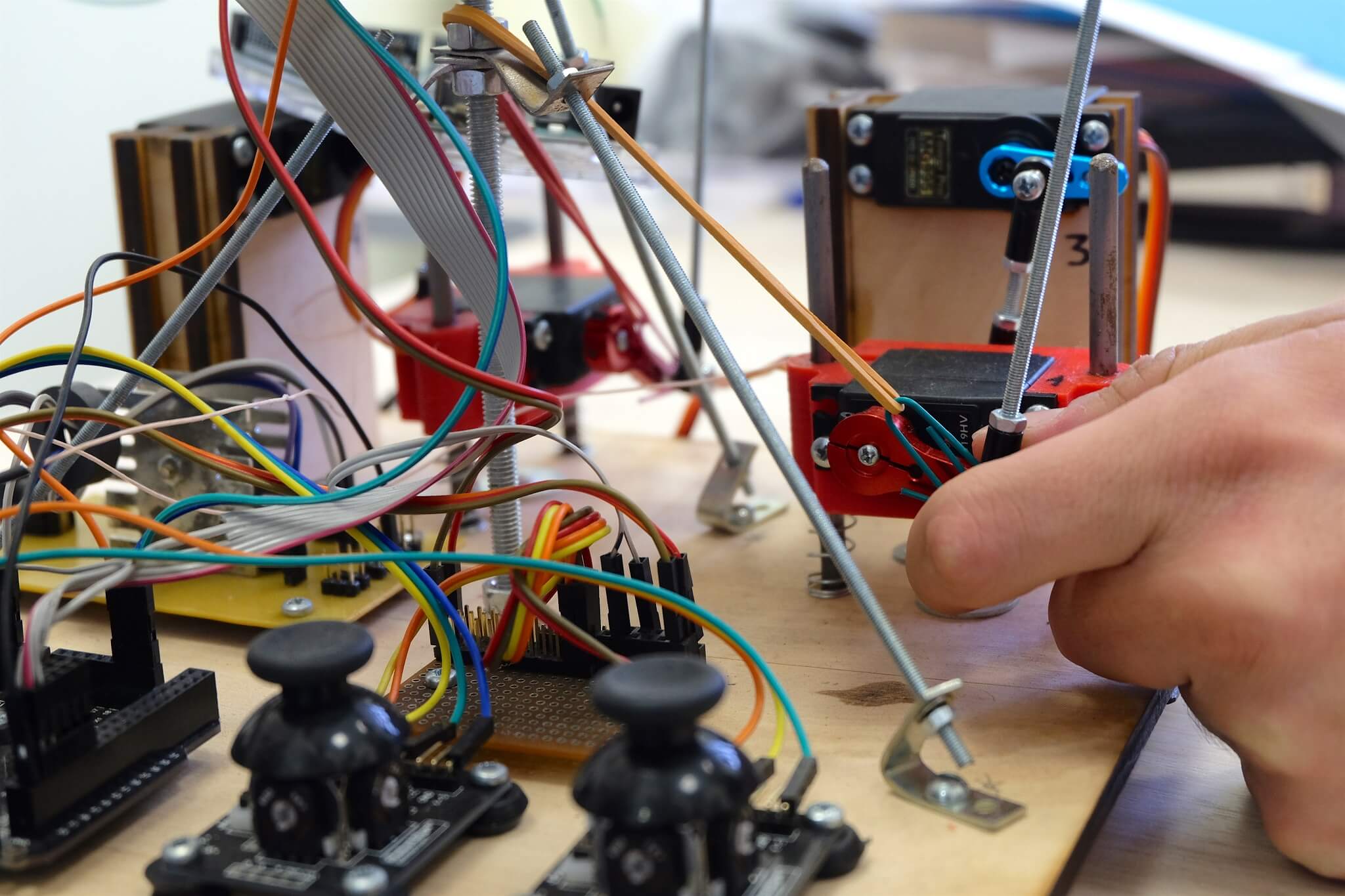
يحتوي المجمع على أجهزة إضافية مسؤولة عن التعويض عن الاضطرابات. لتشغيل هذه الأقراص ، طور موظفو المختبرات خوارزميات خاصة "تهدئة" أنواع مختلفة من التداخل ، مثل الاهتزاز أو الرياح.
بالإضافة إلى ذلك ، يوجد في مجمع الروبوتات في المختبر مرفق بحثي
لـ KUKA youBot ، وهو ذراع آلية بخمسة روابط مثبتة على منصة متنقلة ذات عجلات متعددة الاتجاهات.

اختبرت KUKA youBot خوارزميات
التحكم التكيفي لتتبع هدف متحرك . يستخدمون نظام رؤية يعتمد على الكاميرا الرقمية وإجراءات معالجة الفيديو. أساس هذا المشروع هو البحث في مجال التحكم التكيفي للأنظمة غير الخطية ، التي أجراها طاقم المختبر.
تُستخدم خوارزميات التحكم لتعويض التأثيرات الخارجية التي تعمل على روابط الروبوت. نتيجة لذلك ، فإن الآلة قادرة على تعليق أداة العمل عند نقطة ثابتة في الفضاء وتحريكها بثبات على طول مسار معين.
مثال على مشروع تم تنفيذه على أساس روبوت KUKA youBot ، وهو عبارة عن
إحساس باللحظة المفرطة في
لحظة القوة . جنبا إلى جنب مع شركة TRA Robotics البريطانية ، قمنا بتطوير خوارزمية تسمح لنا بتقييم قوة تفاعل أداة العمل مع البيئة بدون حساسات عزم الدوران باهظة الثمن. سمح ذلك للروبوت بإجراء عمليات أكثر تعقيدًا دون اللجوء إلى الأنظمة الخارجية.

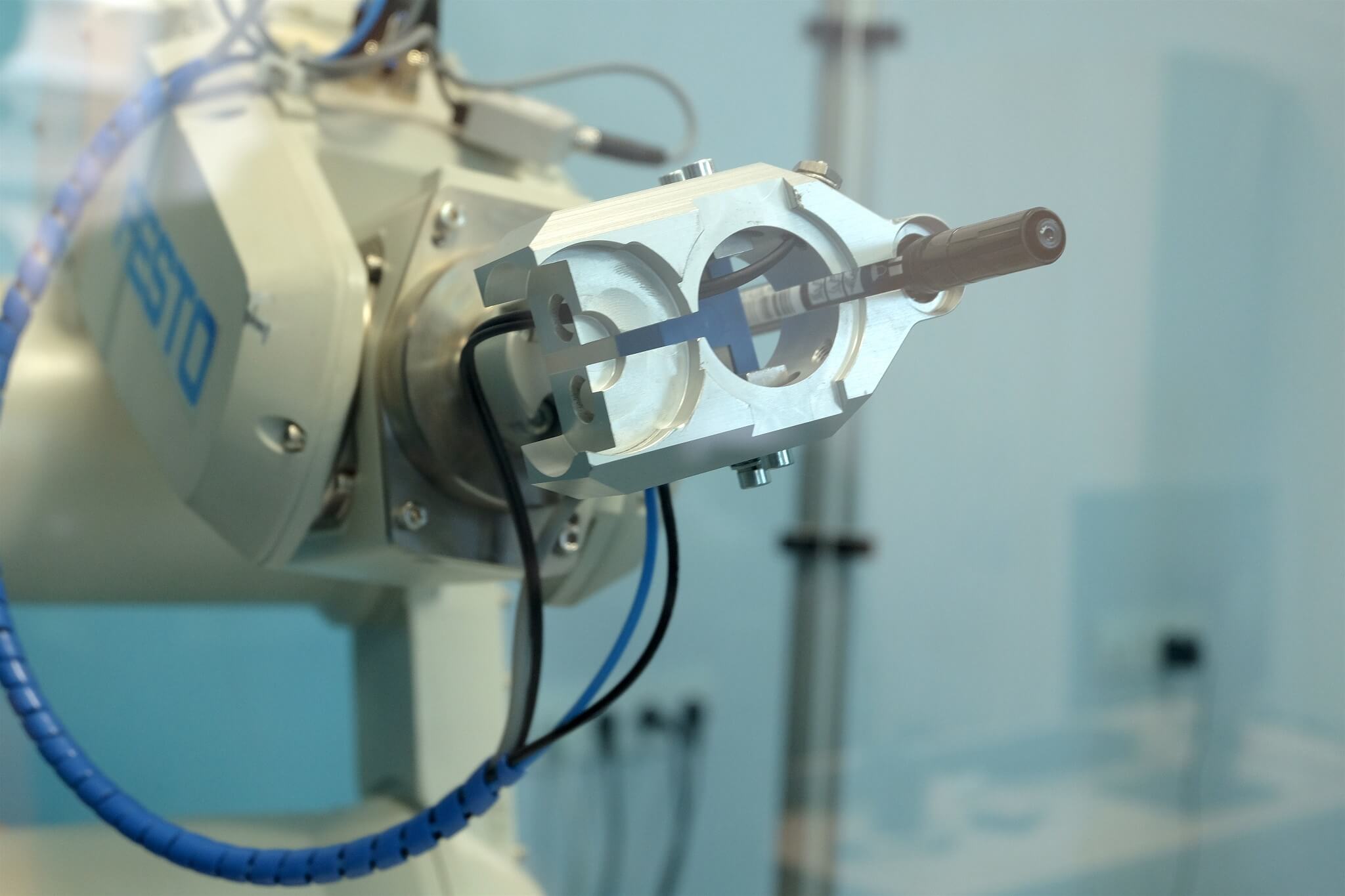
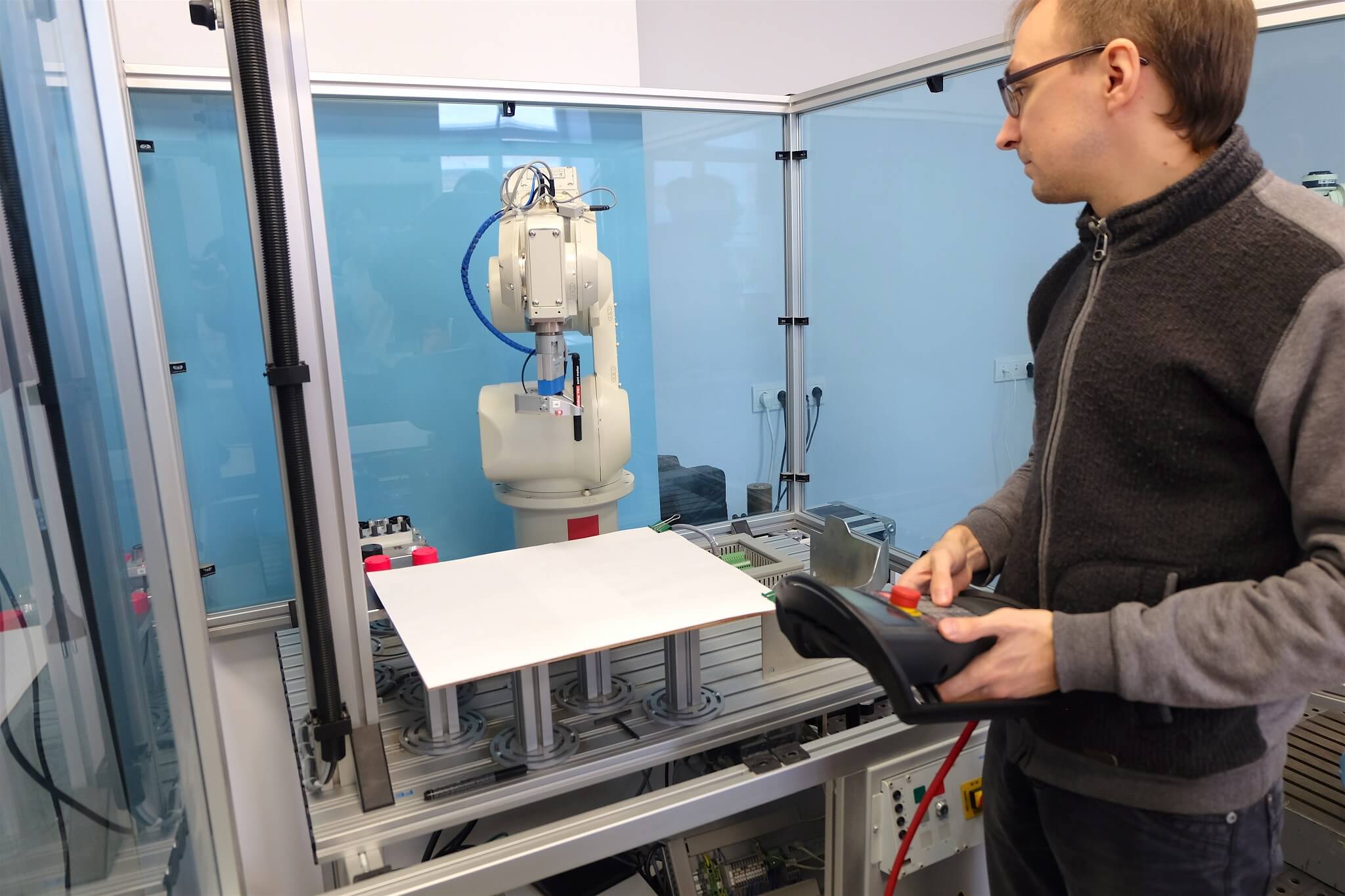
مثال آخر على التركيب الآلي في المختبر هو
FESTO Robot Vision Cell . يستخدم هذا المجمع
لمحاكاة العمليات التكنولوجية في الإنتاج ، مثل اللحام. لتنفيذ هذا السيناريو ، يتم طرح مهمة تخطيط الحركة: تتجاوز أداة لحام المحاكاة محيط الجزء المعدني.
بالإضافة إلى ذلك ، تم تجهيز الخلية بنظام رؤية وقادر على حل مهام فرز الأجزاء حسب اللون أو الشكل.
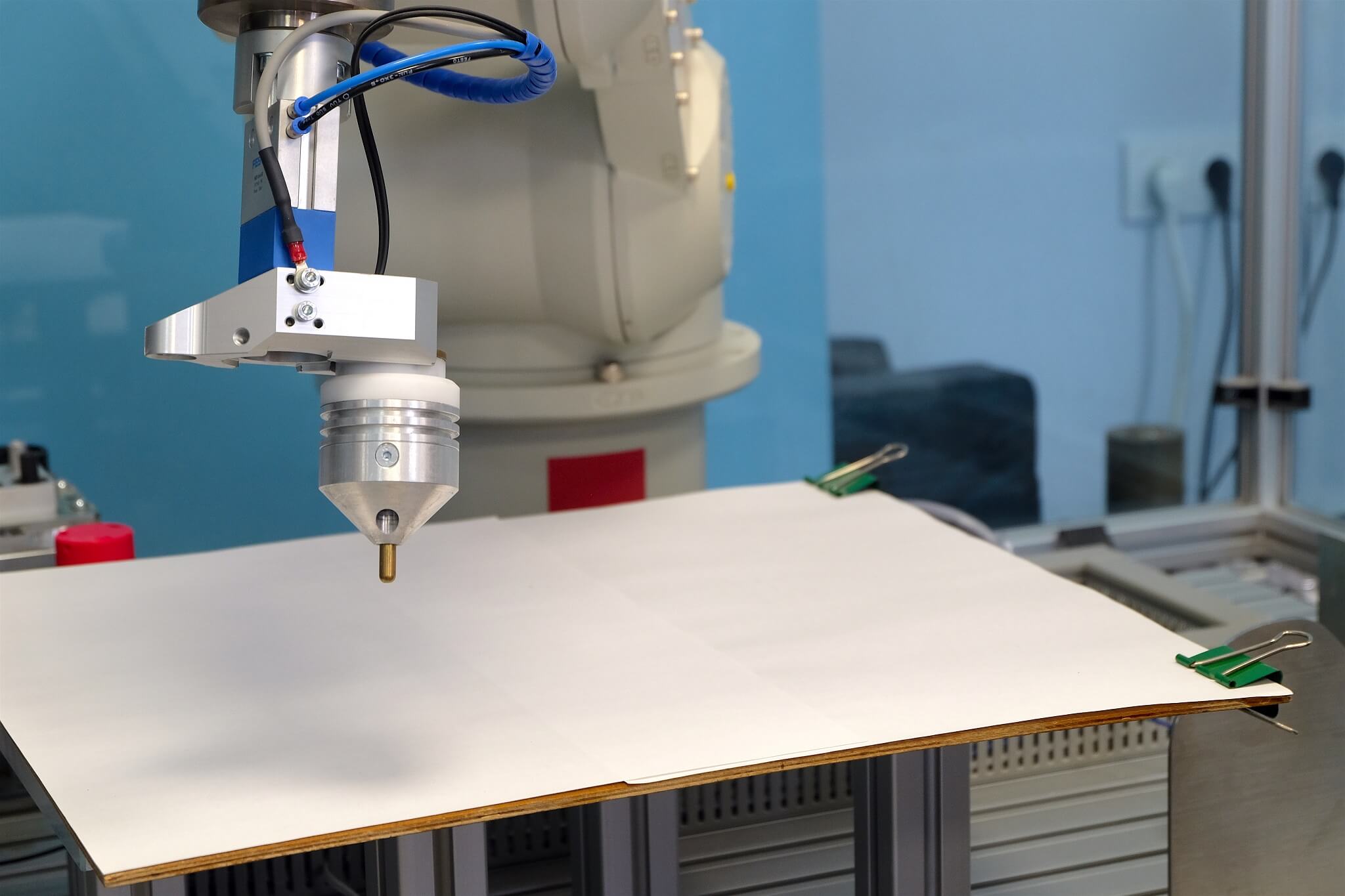
المشروع ، الذي يعتمد على الخلية الروبوتية FESTO Robot Vision Cell مع الروبوت الصناعي Mitsubishi RV-3SDB ، يحل مهام التخطيط للحركة.
يساعد في تبسيط عملية تفاعل المشغل مع وحدة التحكم الآلي عند برمجة المسارات المعقدة. تتمثل الفكرة في برمجة حركات أداة الروبوت تلقائيًا باستخدام الخطوط الظاهرة في الصورة النقطية. يكفي تحميل ملف إلى النظام ، وستقوم الخوارزمية بترتيب النقاط المرجعية اللازمة وتجميع رمز البرنامج بشكل مستقل.
في الممارسة العملية ، يمكن استخدام الحل الناتج للنقش أو الرسم.
لدينا
شريط فيديو على القناة التي صور فيها "فنان الروبوت" صورة أ. بوشكين. أيضا ، يمكن استخدام التكنولوجيا لأجزاء اللحام ذات الشكل المعقد. في الواقع ، إنه مركب آلي يحل المشكلات الصناعية في ظروف المختبر.
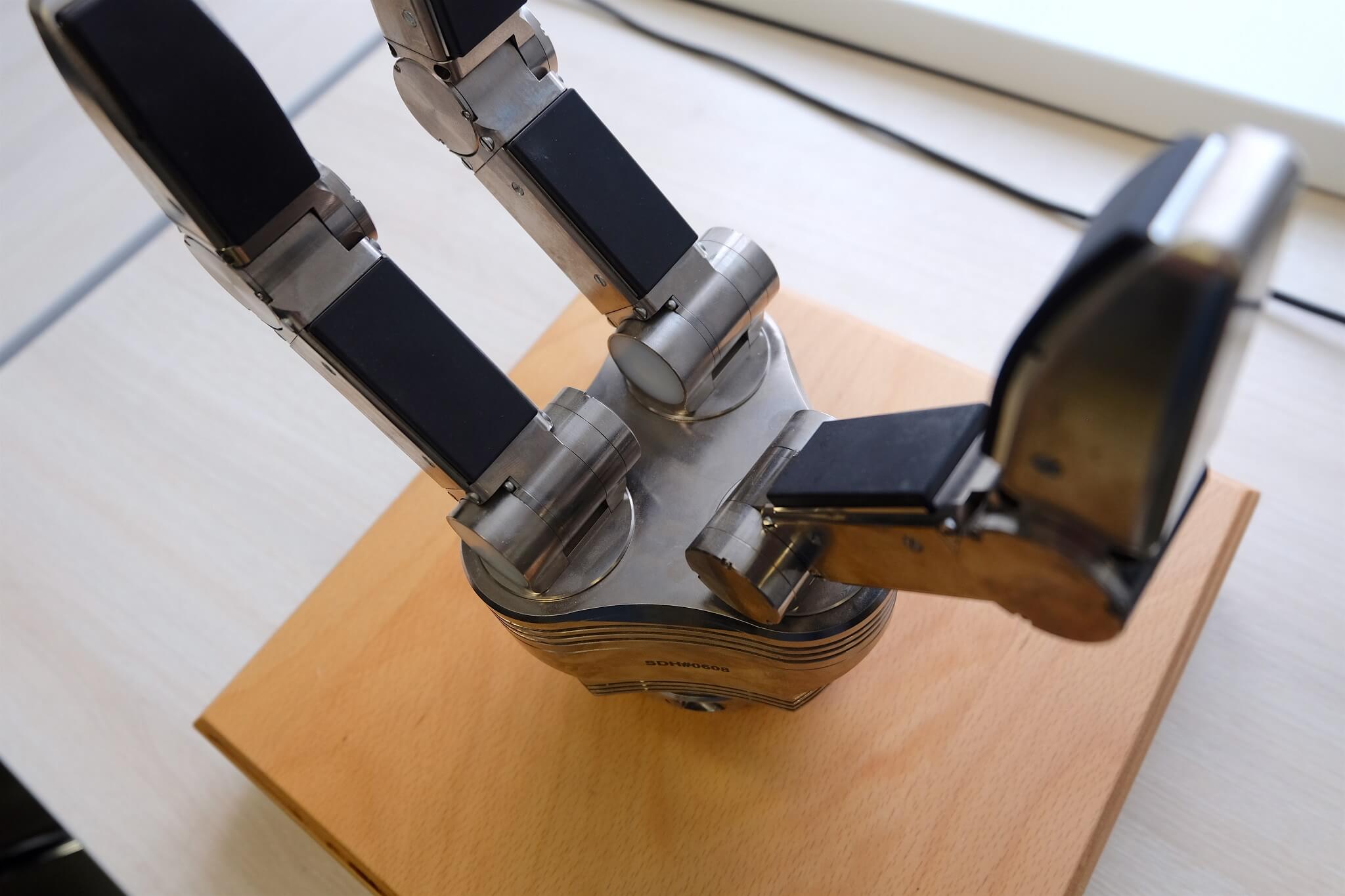
يحتوي المختبر أيضًا على القابض ذو ثلاثة أصابع مجهز بأجهزة استشعار للضغط موجودة على السطح الداخلي للأصابع.
يسمح مثل هذا الجهاز بمعالجة الأشياء الهشة عندما يكون من المهم التحكم بدقة في قوة المقبض لتجنب التلف.
يحتوي المختبر على
نموذج روبوتي لسفينة سطحية ، تم تصميمها لاختبار أنظمة تحديد المواقع الديناميكية.
تم تزويد الطراز بالعديد من محركات الأقراص التنفيذية ، بالإضافة إلى أجهزة الاتصالات اللاسلكية لنقل إشارات التحكم.

يوجد حمام سباحة في غرفة المختبر ، حيث يتم فحص إمكانية تشغيل خوارزميات التحكم
للحفاظ على موضع نموذج صغير لسفينة السطح مع تعويض عمليات النزوح الطولية والعرضية.
حاليا ، من المخطط تنظيم تجمع كبير للاختبارات واسعة النطاق مع سيناريوهات معقدة.

العمل مع الشركاء والخطط
أحد شركائنا هي شركة TRA Robotics البريطانية. نعمل معًا على تحسين خوارزميات التحكم في روبوت صناعي لمؤسسة تصنيع رقمية. في مثل هذه المؤسسة ، سيتم تنفيذ دورة الإنتاج بأكملها: بدءًا من التطوير وحتى تصنيع المنتجات الصناعية بواسطة الروبوتات وأنظمة الذكاء الاصطناعي.
يشمل الشركاء الآخرون اهتمام Elektropribor ، الذي نعمل معه على
تطوير أنظمة الميكاترونيك والروبوتية. طلابنا يساعدون الاهتمام في مجال الأجهزة ، وتطوير البرمجيات ومهام الإنتاج.
نحن
نتعاون أيضًا مع شركة جنرال موتورز ،
ونطور الروبوتات مع InfoWatch. كما يتفاعل موظفو المعمل عن كثب مع شركة
Navis JSC ، التي تنفذ مشاريع لتطوير أنظمة تحديد المواقع الديناميكية للسفن السطحية.
يعمل
مختبر شباب الروبوتات على أساس جامعة ITMO ، حيث يستعد تلاميذ المدارس لمسابقات عالمية المستوى. على سبيل المثال ، في عام 2017 ،
فاز فريقنا بأولمبياد الروبوت العالمي في كوستاريكا ، وفي صيف عام 2018 ،
حصل طلابنا على جائزتين في أولمبياد عموم روسيا لأطفال المدارس.
نحن
نخطط لجذب المزيد من الشركاء في الصناعة وتثقيف جيل الشباب من العلماء الروس. ربما سيقومون بتطوير مثل هذه الروبوتات التي تكمل عضويا عالم البشر وستؤدي مهام روتينية وخطيرة في الشركات.
جولات صور للمختبرات الأخرى في جامعة ITMO: