مرحبًا أيها المشاركون الأعزاء وضيوف الموقع. سأحاول أن أكون مختصرة قدر الإمكان في هذا الموضوع. ازدهار الروبوتات في السنوات الأخيرة ، الكثير من الاهتمام بهذا الموضوع لا يمكن أن يتركني غير مبال.
سعيا لتحقيق حلم الطفولة المتمثل في صنع روبوت ، وصلت إلى منتدى
cyber-place.ru بحثًا عن معلومات منذ عام (لا تفكر في الإعلان). في أعنف تخيلاتي ، فكرت في إنشاء روبوت عن بعد خاص بي ، مع القدرة على التحرك في الفضاء والفيديو والاتصالات الصوتية ثنائية الاتجاه ، مع التحكم عن بعد عبر الهاتف أو الكمبيوتر. استلهمت من النموذج القائم على جهاز التوجيه tplink 3020 مع البرامج الثابتة Cyberwrt. عدم وجود معرفة بالموضوع والفجوات الكبيرة في التعليم لم تتداخل مع رغبتي الهوس لتحقيق نتيجة ، نتيجة للتجربة والخطأ والإلكترونيات المحترقة.
بعد ما يقرب من عام من "التعلم من أخطائي" ، ظهرت النتائج الأولى ، وهي آلة لديها القدرة على التحكم عبر الإنترنت على أساس Cyberbot -3 ، والتي بفضل الكثير من مطوريها ، قام الرجال بعمل رائع حقًا! (بالنسبة لي ، البرمجة وإنشاء البرامج هي مجرد مساحة!) قام العديد من الأشخاص بالآلة الكاتبة ، والمعدات والتعليمات المفصلة موجودة على مساحات شاسعة من الإنترنت. لذلك ، للتركيز على هذا لا أرى أي سبب.

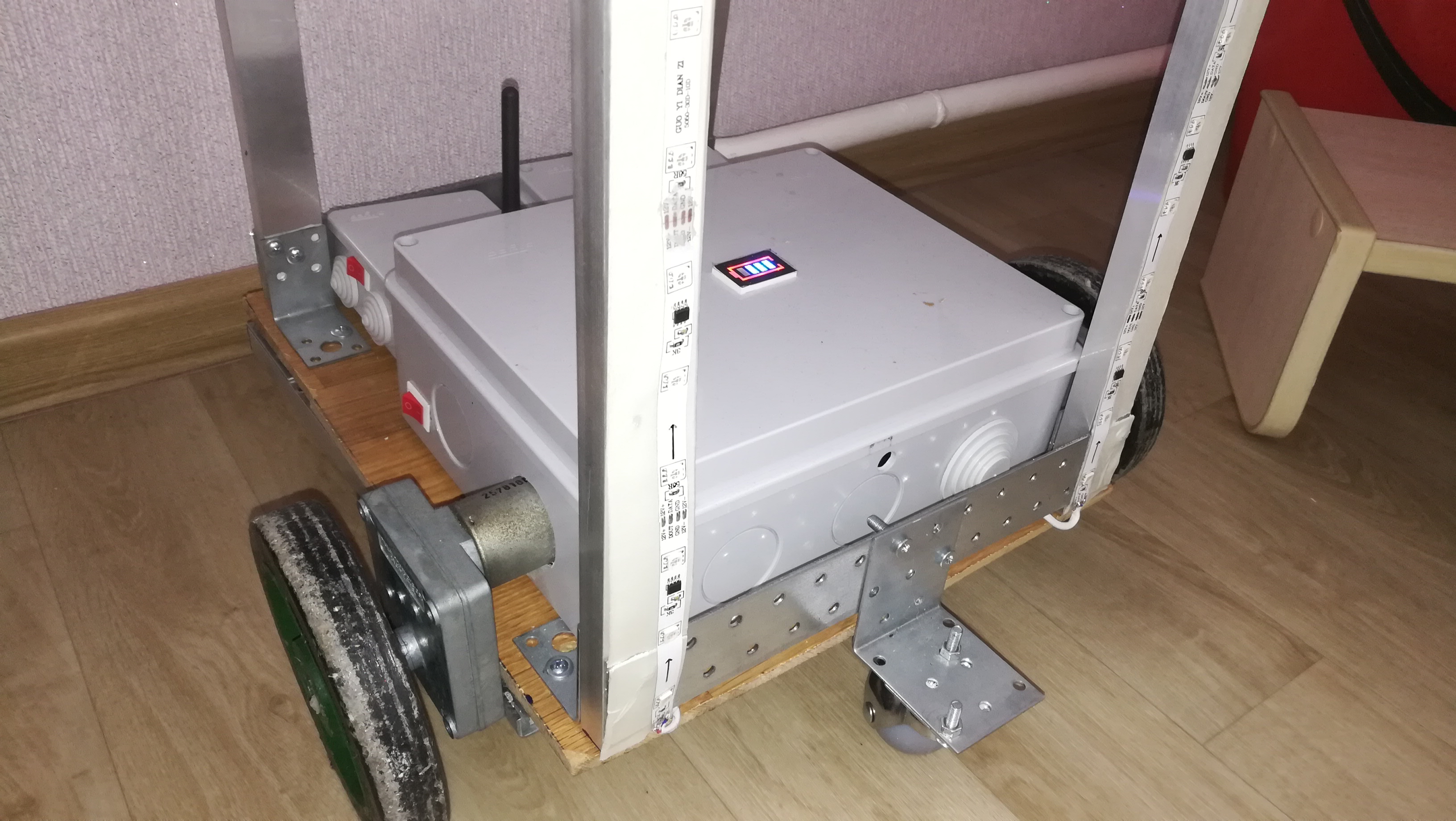
علاوة على ذلك ، نشأت الحاجة إلى استقلالية الجهاز ، حيث بنيت (من وسائل مرتجلة) على "محطة شحن" ، بالإضافة إلى جهات اتصال محمّلة بنابض أمام الروبوت. يتم تحديد القوة الرئيسية للروبوت 4.2V لإمكانية الشحن من مصدر طاقة 5V. لزيادة تيار الشحن ، تم لحام وحدتي TP4056 بشكل متوازٍ. إدارة كل هذا الاقتصاد عبر الإنترنت عن طريق الهاتف ، من خلال متصفح.


بعد أن لعبت بما فيه الكفاية مع النموذج الذي قررت ، أحتاج إلى المضي قدمًا. لسوء الحظ ، لم أجد طريقة (أعتقد أن كل شيء لا يزال أمامنا) لإدارة الجهاز بناءً على وحدة التحكم الرئيسية.
نظرًا لأن هذا الجهاز لا يسمح بالاتصال الصوتي ثنائي الاتجاه ، لم أتمكن من العثور على طريقة أفضل لكيفية استخدام كاميرا DS-2CD2432F-IW CCTV ، هذه الكاميرا بدعم من برنامج جهة خارجية على android (tinyCam PRO) تسمح بمراقبة الفيديو والصوت ثنائي الاتجاه. في البداية ، كانت هناك فكرة (مجنونة) للاتصال بالموصل الهندسي للكاميرا من أجل قراءة uart ، استخدم برنامج الكاميرا القياسي للتحكم في حركة العربة الآلية. استخدام كاميرات PTZ للتحرك. لقد خططت للنظر في الفرق التي ترتكز على uart عندما أضغط على اليسار ، اليمين ، أسفل ، لأعلى بواسطة كاميرا ليست دوارة ، ثم دفع هذه الأوامر إلى uart arduino nano ، والتي كان من المفترض أن تتحكم في المحركات ، لذلك أردت حل المشكلة الرئيسية بنفسي ، وليس الكتابة البرمجيات. لم تنجح الفكرة ، حظرت الشركة المصنعة هذه الأوامر ، باستثناء الرسالة "ptz not support" عند النقر فوق أزرار PTZ في uart لم يأت شيء.
لذلك ، كانت "الكاميرا على عجلات" وليس روبوت التواجد عن بعد نتيجة لجهودي.
للتحكم في الجهاز من الهاتف ، أستخدم القدرة على فتح العديد من التطبيقات على نظام Android ، ما يسمى بـ "النوافذ العائمة" (في الإصدارات اللاحقة ، يعمل بدون تطبيقات الطرف الثالث مثل التطبيقات العائمة). يجب عليك فتح تطبيقين ، tinyCam PRO للوصول إلى واجهة الكاميرا ومتصفح للوصول إلى عنصر تحكم العربة.
لذلك ، النتيجة: صندوق تقاطع كهربائي كصندوق لاستضافة المعدات tp link 3020 مع البرامج الثابتة CyberWRT ، وهوائي ملحوم ، + 10dB في حالتي ، وهو arduino nano يستقبل أوامر uart من واجهة الويب الخاصة بالموجه ، وهو درع محرك الوحش للتحكم في علب تروس المحرك القوية التي تمت إزالتها من ماكينات القمار القديمة.

يبلغ ارتفاع الروبوت 165 سم ، والوزن حوالي 10 كجم ، الطاقة 12.6 فولت (وحدة تجميع شحن الليثيوم 18650 + وحدة شحن مع موازن) ، علبة من المايونيز بدلاً من الرأس الذي تكون الكاميرا مخفية فيه ، يتم استبدال مكبر الصوت المتفرغ للكاميرا بمكبر صوت بقدرة 5 وات حتى أتمكن من سماع صوت أفضل . العيون - تم إدخال مصباحي LED في العاكسات من أسفل الأضواء ، ويتم التحكم في العينين من خلال واجهة cyberbot ، وشريحتين LED يمكن معالجتهما ووحدة تحكم إضافية صغيرة من arduino pro للتحكم فيها (بفضل Alex Guyver ، تمزق "مصباح النار" الخاص بمشروعه).
يتم التحكم في الشريط من خلال وحدة الترحيل ، عند القيادة ، وكذلك من خلال واجهة cyberbot.
يرجع المظهر المحرج إلى حقيقة أن الروبوت أرتدى ملابسه وهنأ الزملاء في الثامن من مارس. (ركب الروبوت إلى الموسيقى من جهاز الإنهاء ، والتي تتحكم فيها من مكان معزول ، بسبب الخلط بين الموسيقى الخفيفة والتضمين السلس لمصابيح LED ، وكان الجمهور مسرورًا).


في المستقبل ، أخطط لإتقان العمل مع المعالج ، قم بإزالة جميع العناصر "غير الضرورية" ، وحدد المعدات الضرورية (استبدل جهاز التوجيه واردوينو بـ ESP32) والبرنامج حتى أن جدتي تمكنت من إدارة "التصميم" :)) لم يتم الكشف عن الموضوع بشكل كامل ، لم أقم بتغطية العديد من النقاط حتى لا تؤخر المشاركة الطويلة ، إذا أعجبك الموضوع ، فإنني أتطلع إلى انتقاداتك ونصائحك.