
قاد روبوت يوتو -2 القمري 43 متراً في اليوم القمري الثالث ، مما أضافهم إلى 44 (44.185) مترًا في اليوم القمري الأول و 76 مترًا (75.815) في اليوم القمري الثاني. غطى المجموع 163 متر في ثلاثة أيام قمرية. هل هو كثير أم قليلا؟ ولماذا هي مسافة قصيرة يسافر روفر القمر في هذه المهمة؟
مواد سبق نشرها حول مهمة Chang'e-4: اليوم القمري الثالث لمهمة Chang'e-4 هو الفترة من 27 فبراير 2019 إلى 13 مارس 2019:
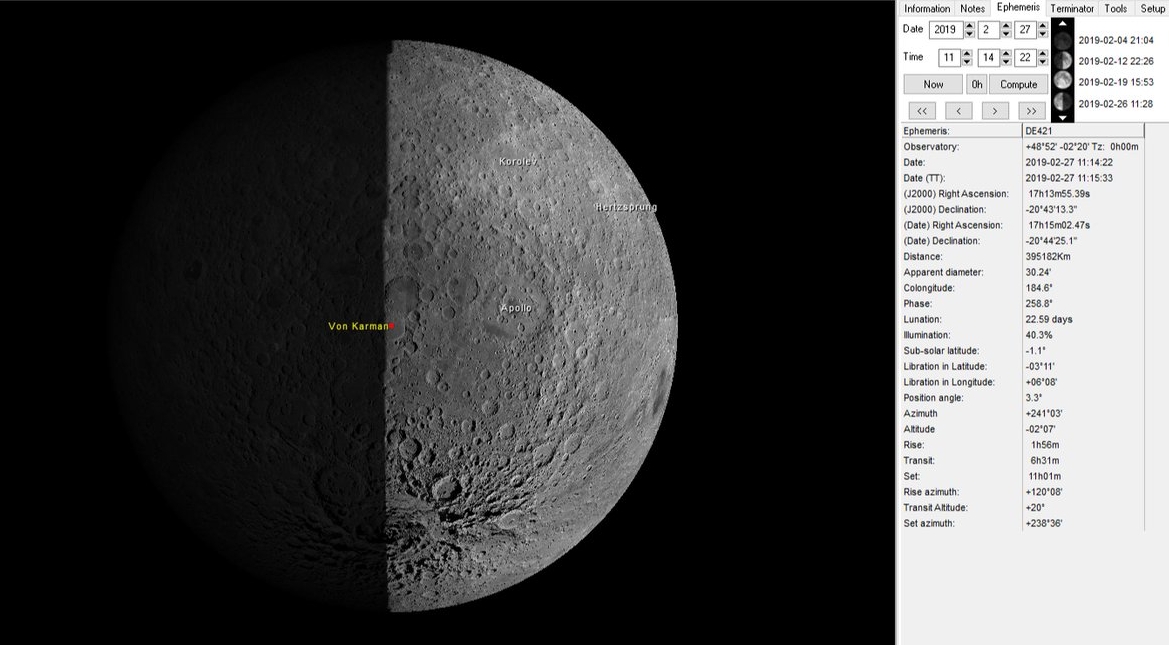
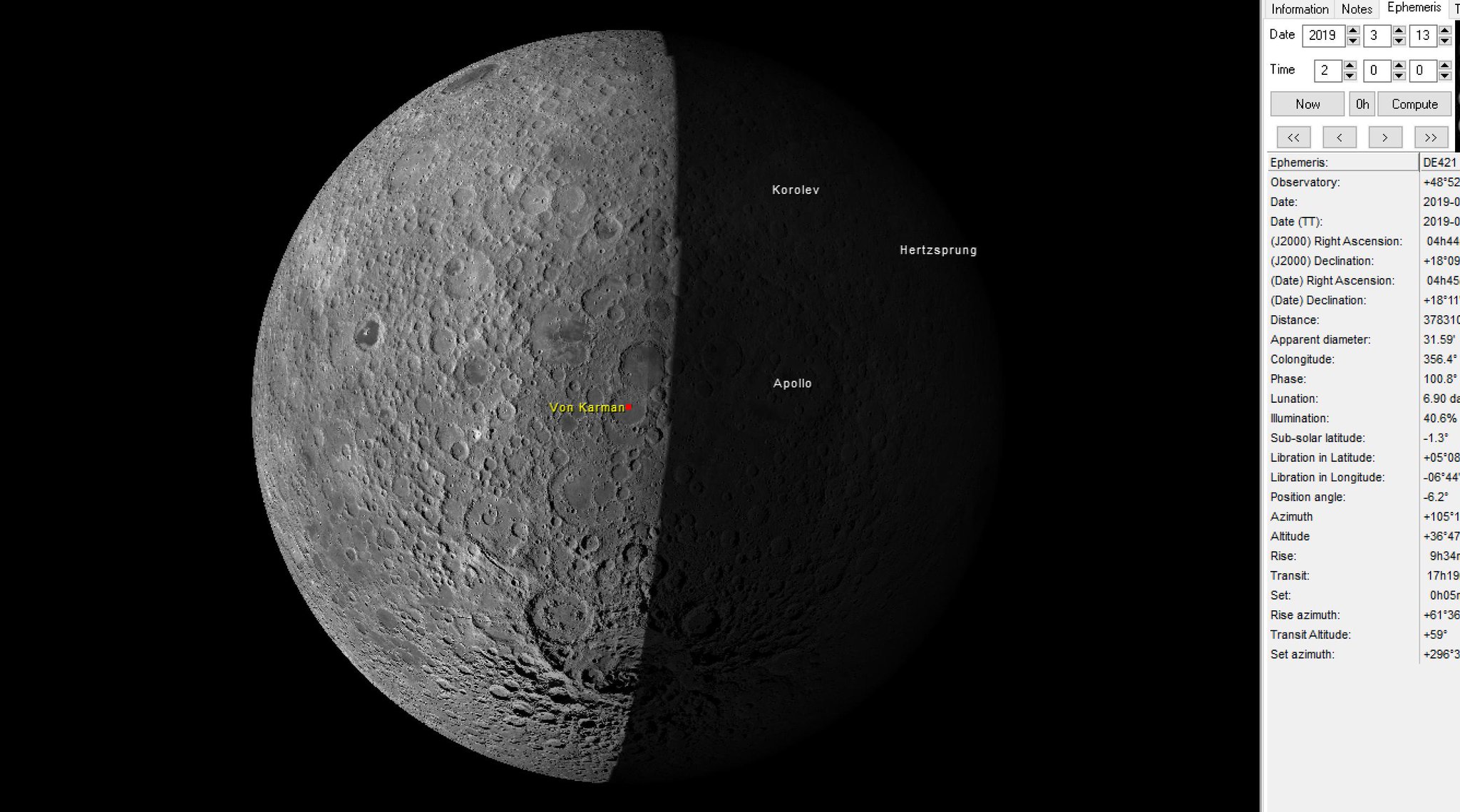
منذ 13 مارس 2019 ، تم وضع المعدات الخاصة بوحدة الهبوط Chang'e-4 و Rover Yutu-2 للنوم حتى نهاية الليلة القمرية الثالثة من أجل البقاء على قيد الحياة لفترة بيئة منخفضة الحرارة للغاية على الجانب البعيد من القمر.
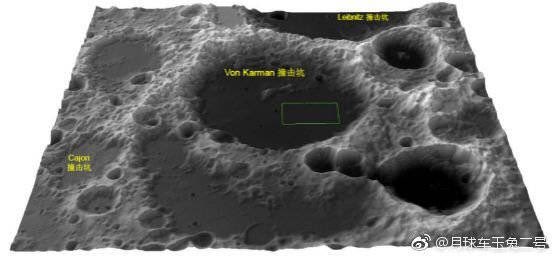
ما هو السطح على الجانب الآخر من القمر؟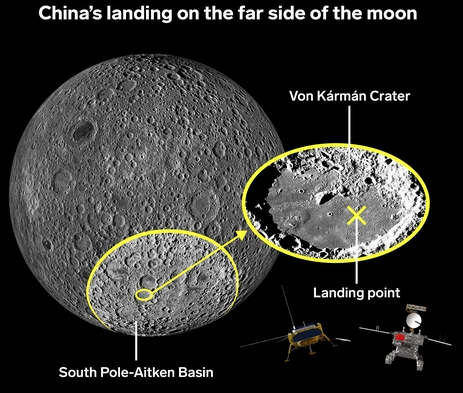
نظرًا لأن الجانب العكسي للقمر لديه أيضًا راحة أكثر تعقيدًا من الجانب المرئي من الأرض ، في عملية التحرك على طول السطح ، واجهت سيارة Yutu-2 روفر مشاكل وتداخل أكثر خطورة في المحركات ، مقارنةً بتلك التي واجهها سابقًا ، المسبار روفر Yutu ، "أرسلت إلى سطح القمر في عام 2013.
لسوء الحظ ، فإن أول مركبة من طراز Yutu من مهمة Chang'e-3 ، في 25 يناير 2014 ، كانت غير قابلة للتشكيل تقنيًا (فشل العناصر نتيجة تصادم) بعد التغلب على 114.8 مترًا على سطح قمري معقد.
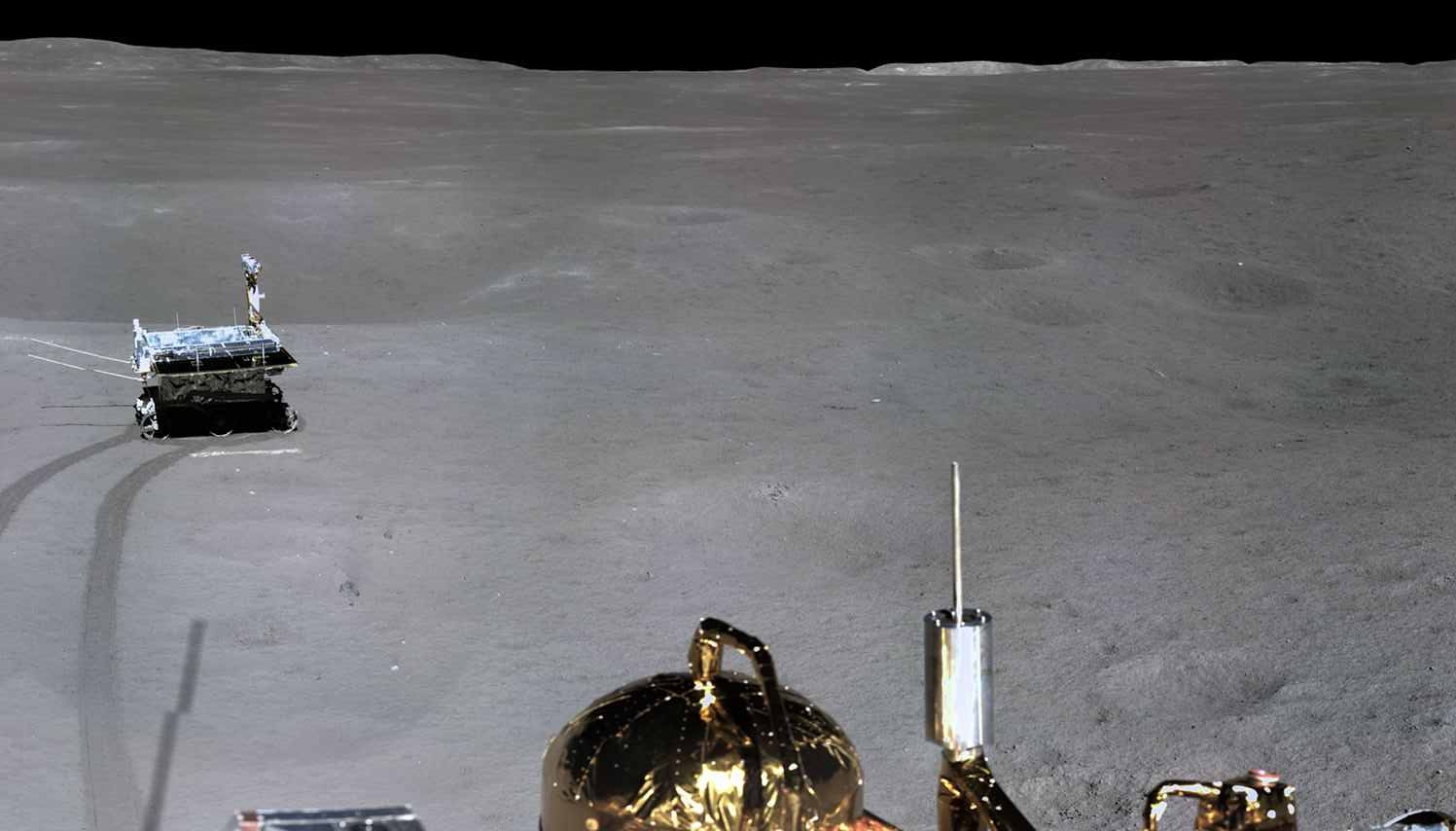
سطح القمر في منطقة الهبوط في وحدة الهبوط Chang'e-4 مليء بالثنيات والعديد من الحصى والحفر الصغيرة ، وبعد إجراء كل من حركاته الصغيرة ، يجب أن تتوقف Yutu-2 rover ، وتصوير السطح حولها وترسل هذه البيانات إلى الأرض عبر القمر الصناعي مكرر.
ثم يقوم العلماء والمشغلون في مركز عملائي (MCC) والمهندسون على الأرض بمعالجة هذه البيانات ورسم مسار آخر تتبعه طائرة Yutu-2.
يجب تكوين هوائيات Yutu-2 rover بحيث تشير إلى ساتل مكرر لإرسال واستقبال إشارات التحكم بشكل صحيح ، في حين يجب إمالة الألواح الشمسية في روفر بشكل أمثل لتلقي كمية كبيرة من ضوء الشمس لتعظيم الإخراج الكهرباء في وقت نقل البيانات.
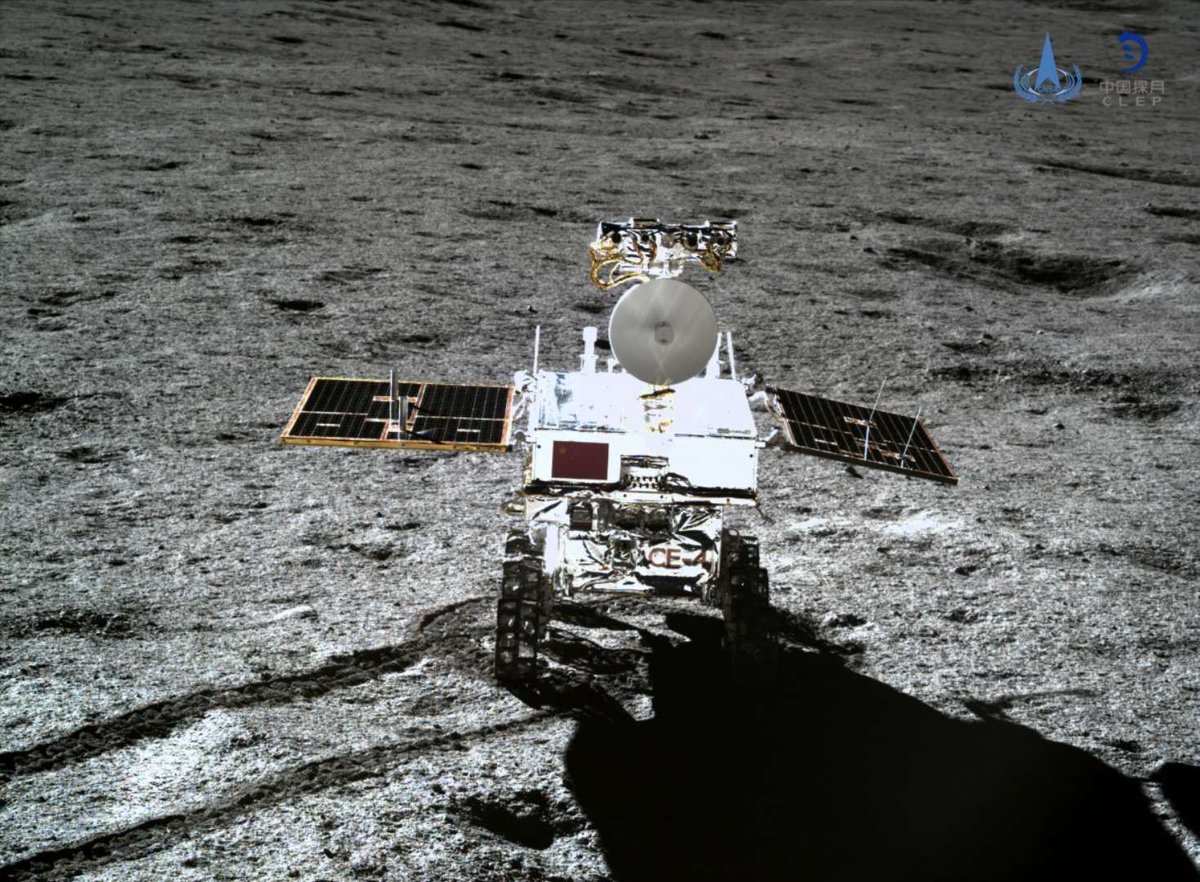
 روفر ذات ست عجلات "Yutu-2":
روفر ذات ست عجلات "Yutu-2":- تبلغ الكتلة الكلية للروفر حوالي 140 كجم (310 رطل) ؛
- القدرة الاستيعابية - حوالي 20 كجم (44 رطلاً) ؛
- يمكن أن تتحرك على طول المنحدرات ولديها أجهزة استشعار تلقائية تمنع الاصطدام بأشياء أخرى ؛
- يتم تزويد روفر بالكهرباء باستخدام لوحين شمسيين ، مما يسمح للعمل روفر خلال يوم قمري ؛
- الحد الأقصى للسرعة 200 متر في الساعة (لا يزال يتعذر الوصول إلى هذه السرعة على سطح القمر - لأن العناصر الموجودة على السطح لن تسمح بتسريع وتعطيل المسبار في وقت مبكر) ؛
- الحد الأقصى لمنطقة البحث - 3 متر مربع. كم.
- يقدر وقت العمل - 3 أشهر (2160 ساعة) ؛
- الحد الأقصى للمسافة المقدرة هو 10 كم.
في الوقت الحالي ، مر 70 يومًا (1680 ساعة) بعد هبوط روفر Yutu-2 على سطح القمر و 97 يومًا (2328 ساعة) بعد إطلاق روفر Yutu-2 من مركبة الفضاء سيشان كجزء من مهمة Chang'e-4 إلى القمر.
في الواقع ، لقد نجحت سيارة Yutu-2 rover في تحديد عمرها التشغيلي المقدر ، ولكن في حالة "الاستيقاظ" الناجح بعد النوم في 27 مارس 2019 ، من المخطط أن تستمر في إجراء الأبحاث السطحية في يومها القمري الرابع.
لكن مقدار قدراتها من حيث القدرة على العمل يكفي بالفعل خارج نطاق التصميم وستبدأ المشاكل أو الأعطال في المكونات والأنظمة ، حيث إن انخفاض درجات الحرارة والإشعاع والتلوث والعوامل الخارجية الأخرى على سطح القمر سيؤثر على خصائصه بقوة أكبر كل ساعة.
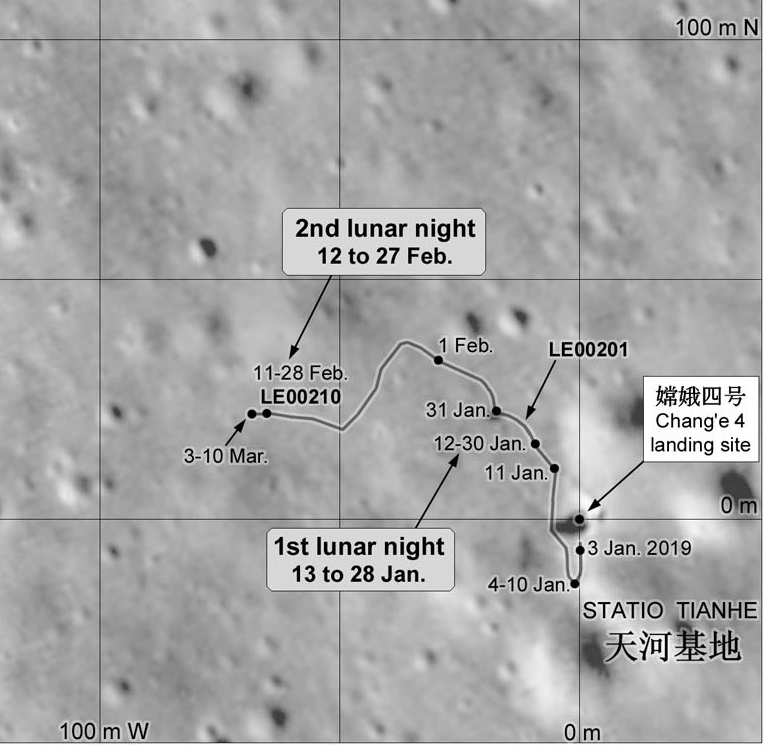
مسار روفر "Yutu-2" في اليوم القمري الأول وجزء من اليوم القمري الثاني:
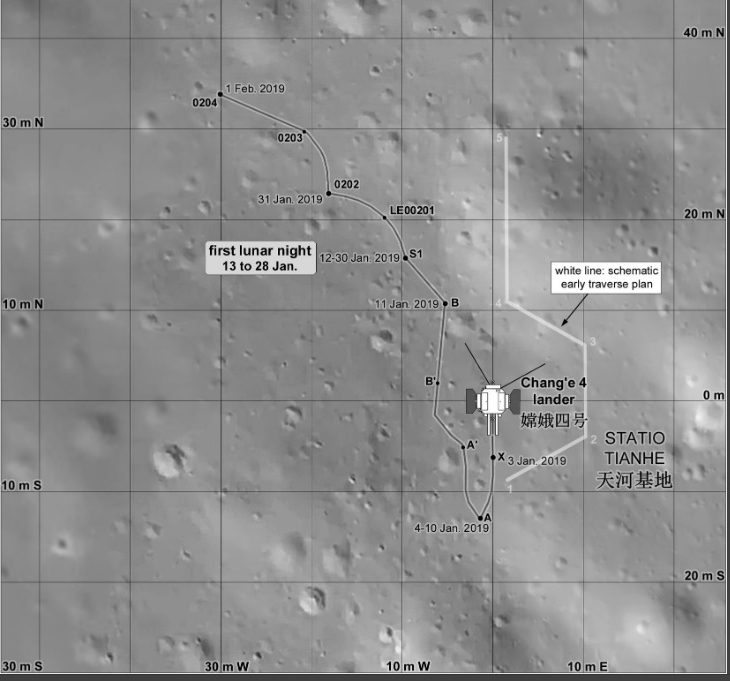
يمكنك التحقق من صورة موقع الهبوط ، والتي جعلت مسبار NASA LRO من ارتفاع 82 كم ، بدقة 0.85 متر (33 بوصة) لكل بكسل:

في الوقت الحالي ، يقع روفر Yutu-2 على بعد أكثر من 80 مترًا قطريًا من وحدة الهبوط Chang'e-4 وسافر 163 مترًا بعد الهبوط.
 لماذا محرك Yutu-2 بالسيارة قليل جدًا؟
لماذا محرك Yutu-2 بالسيارة قليل جدًا؟أولاً ، إنه "خوف" من شل حركة روفر Yuta-2 (وعدم تكرار مصير روفر Yuta الأول) ، وبالتالي ، يجب أن تتحرك روفر Yuta-2 حول سطح القمر ، متجنبة العقبات بعناية. يجب أن يتم كل سنتيمتر من حركته بعناية وبشكل صحيح. في مهمة مركز عملائي (MCC) الخاصة بـ Chang'e-4 ، يحاولون تجنب موقف تتدحرج فيه سيارة Yutu-2 ، مما يعني أنها لن تكون قادرة على العودة إلى موقع عملها مرة أخرى. الألواح الشمسية على جانبي روفر Yutu-2 القمري هشة للغاية ، ويمكن أن تتصدع أو تصبح متربة بعد السقوط ، مما يجعلها غير صالحة للاستعمال.
ثانياً ، من المرجح أن يسقط الجانب البعيد من القمر في النيازك ، وبالتالي فإن التضاريس هناك معقدة للغاية ، على سطح القمر في منطقة الهبوط هناك الكثير من الحفر الصغيرة والمسافات البادئة التي تحتاج إلى أن تدور حول المسافة الأكثر أمانًا ، ولكن لا تزال تحتاج إلى المتابعة بحثًا عن تلك التي تحتاج إلى دراستها عناصر السطح - الحجارة الكبيرة والتكوينات. كما أن البحث والبحث عن التكوينات المختلفة ضروريان أيضًا للتوقيف القسري لإجراء الأبحاث في مكان واحد مع وقت توقف طويل.
وهكذا ، في اليوم الأول والثاني للقمر ، تم أيضًا وضع اللمسات الأخيرة على البيانات المستقاة من الكاميرات الموجودة على متن روفر Yutu-2 وخريطة مفصلة لمنطقة موقع الهبوط والطريق الإضافي المحتمل للمركبة ، والذي اتضح أنه متعرج أكثر بكثير من المسار المباشر المخطط له سابقًا.
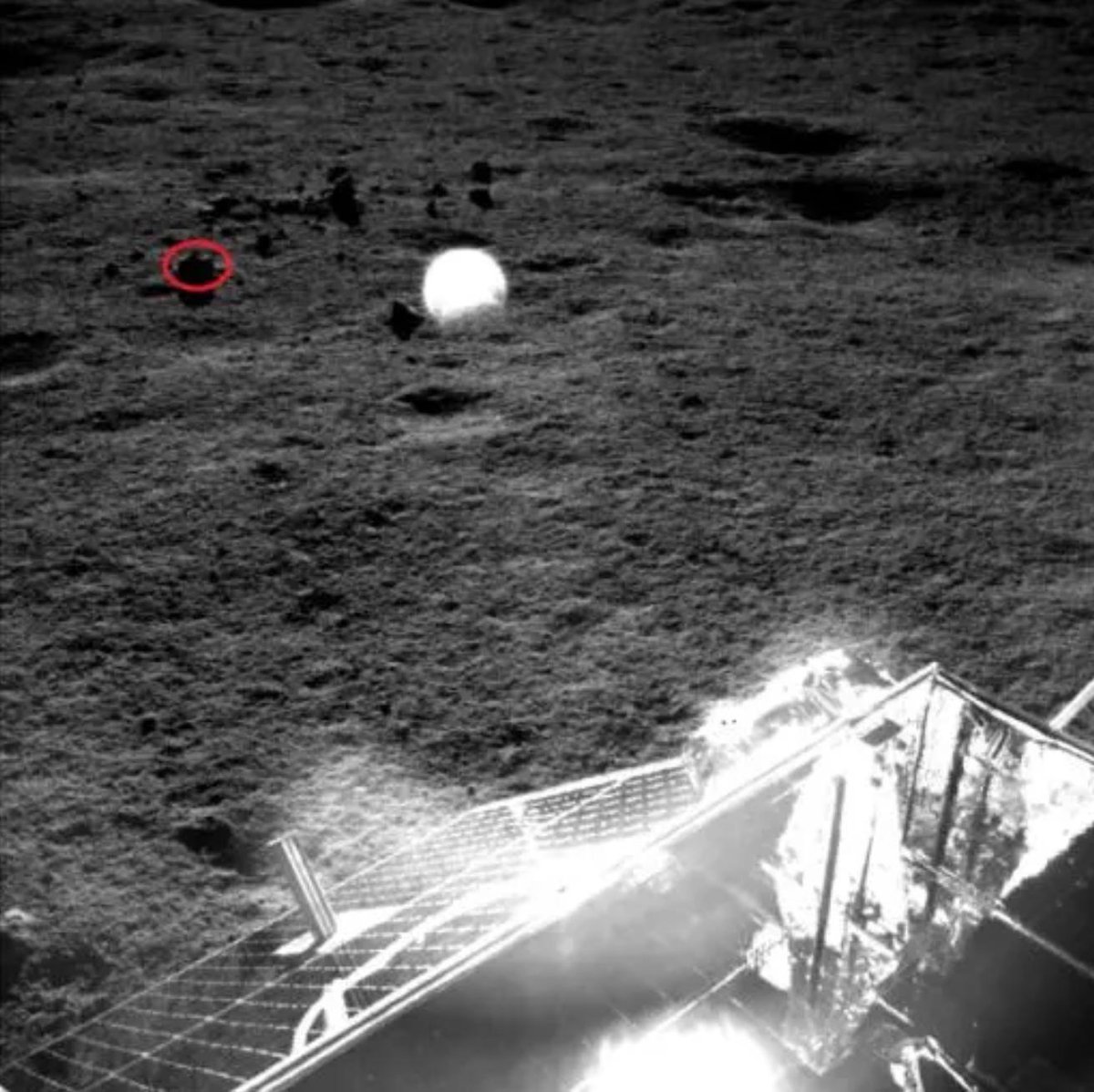
في اليوم القمري الثالث ، وصلت روفر Yutu-2 إلى مكان به تكوينات مثيرة للاهتمام على سطح القمر - قمم حادة على السطح ، أحجار منفصلة كبيرة ومتوسطة الحجم.
قد تكون عناصر المناظر الطبيعية على الجزء الخلفي من سطح القمر أكبر من تلك الموجودة على الجانب المرئي ، لذلك فإن دراسة التربة والحجارة على الظهر يمكن أن تلقي مزيدًا من الضوء على أصل القمر وتطوره.
من يتحكم في روفر Yutu-2؟يعد القياس عن بعد والبيانات المستمدة من الكاميرات والمعدات العلمية وفرق التحكم والمراقبة على مدار الساعة لمعلمات روفر Yutu-2 من اختصاص مهندسي مركز التحكم في الفضاء التابع للأكاديمية الصينية لتكنولوجيا الفضاء.
في الصين ، يرتبط القمر تقليديًا بالنساء ، كما يُطلق على برنامج استكشاف القمر الصيني اسم إلهة القمر Chang'e ، التي تؤكد على مساهمة العالمات والمهندسات في تطوير أبحاث الفضاء.
في أسطورة صينية ، طارت فتاة تدعى Changye إلى القمر وأصبحت إلهة هناك ، لكنها لا تستطيع العودة إلى الأرض لجمع شملها مع زوجها.
تعد الفتيات المهندسات في مركز التحكم في الفضاء التابع للأكاديمية الصينية لتكنولوجيا الفضاء أكثر حظًا - فالكثير منهن لديهن الفرصة للسفر "تقريبًا" إلى القمر والوقوف في وقت واحد على الأرض مع أحبائهم.
اتضح أن النساء من الفريق الهندسي لإدارة والتحكم في روبوت Yutu-2 لديهن إحساس أقوى بالمسؤولية والمثابرة من كثير من زملائهن الذكور ، فهم أكثر إلحاحًا وملاحظًا لأدق التفاصيل في عملية العمل مع روفر Yutu-2 . لذلك ، من بين مجموعة المهندسين والمشغلين في روفر "Yutu-2" ، يمكنهم إظهار الحد الأقصى من المواهب العلمية والهندسية في عملهم.
التحقق من بيانات القياس عن بعد مع زميل له:

روفر مشغل مكان العمل "Yutu-2":

والآن عاد إلى روفر Yut-2.
منذ أكثر من ثلاثة مليارات سنة ، قصف الجزء الخلفي من القمر من قبل الكويكبات والنيازك الكبيرة ، والتي تسببت في حدوث تغيير عالمي على سطحه ، ويجري دراسة آثار هذه العملية من قبل روفر Yutu-2.
تعد الكاميرات الموجودة على متن Yutu-2 rover ثابتة ، وللحصول على الصور اللازمة ، من الضروري إجراء حركة وتعديل دقيق للموضع الأفقي ، بالإضافة إلى تعويض زاوية الإمالة في روفر نفسها ، والتي تستغرق الكثير من الوقت للمشغلين في مركز عملائي. بعد كل شيء ، السطح في منطقة الهبوط لجرافة Yutu-2 مملوءة بحفر بأحجام مختلفة ، مما يجعل من الصعب للغاية التحرك بأمان.
اتضح أن روفر Yutu-2 قادر على تجاوز بعض العقبات تلقائيًا ، إذا كان هناك حجر كبير أو فوهة كبيرة أمامه ، فيمكنه التوقف من تلقاء نفسه والتخطيط لطريق جديد لتجاوز هذا المكان ، وفي هذه الحالة ، يمكن للمشغل في مركز عملائي تسجيل هذا الوضع وإعادة إنشاء المخطط الطريق إلى واحدة جديدة.
يمكن أيضًا لمركبة Yutu-2 تسلق منحدرات صغيرة وعبور سطح صخري. لكن الجبهة الرئيسية لعمله هي الحركة على سطح أفقي مسطح والتربة القمرية.
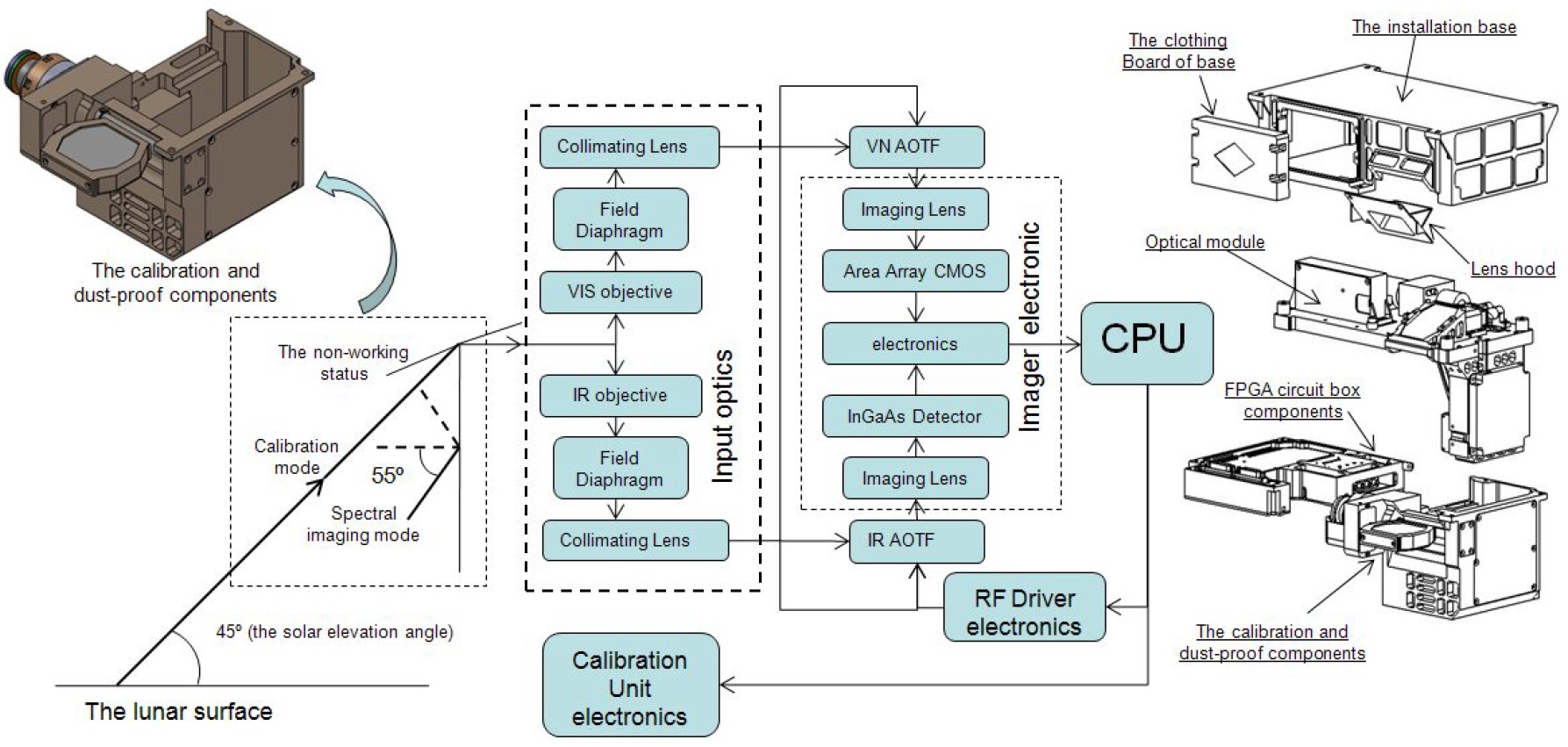
إذن ما نوع الجهاز الذي تم تركيبه على "مطياف VNIS" على متن روفر Yutu-2؟تم تطوير مطياف الأشعة تحت الحمراء للقمر VNIS (مطياف التصوير المرئي والأشعة تحت الحمراء) في معهد شنغهاي للفيزياء التقنية التابع لأكاديمية العلوم الصينية.
يستخدم مقياس الطيف مرشحات ضبط صوتية بصرية غير متداخلة ، وهو يتألف من مطياف فيديو VIS / NIR (0.45–0.95 ميكرون) وطيف IR قصير الموجة (0.9–2.4 ميكرون) ، ويتضمن أيضًا وحدة معايرة مع حماية من الغبار والتلوث.
تم تثبيت مطياف أمامي على متن Yutu-2 روفر ، لديه القيود التالية على تحديد المواقع والعمل مع المواد القمرية:
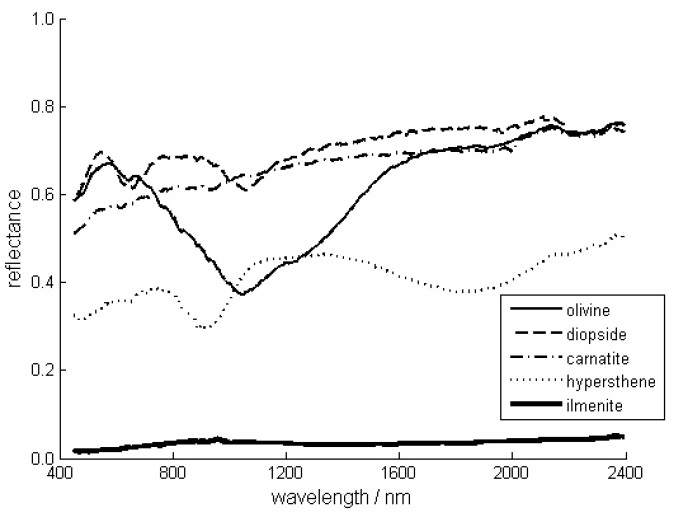
المعادن ، مثل البيروكسين ، بلاجيوجلاز ، أوليفين والإيلمينيت ، التي تشكل معظم الصخور السطحية على سطح القمر ، لها خصائص طيفية مميزة:
المخطط الهيكلي للطيف:
الخصائص التقنية الرئيسية للطيف:

ظهور مطياف:

الأبعاد الهندسية لإطار الكشف:
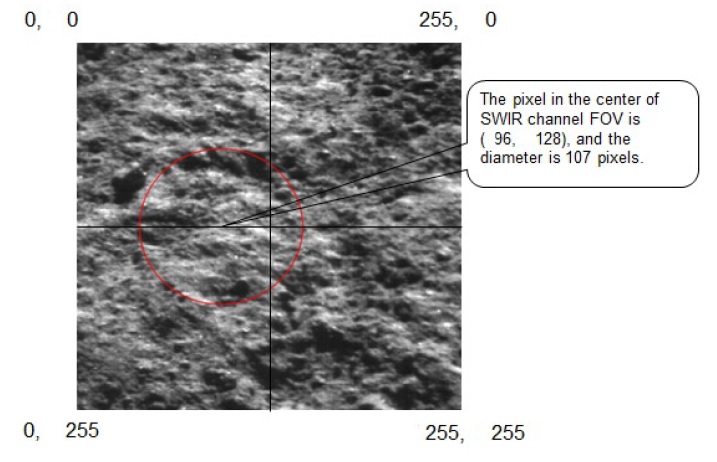
البيانات التي تم الحصول عليها بواسطة مطياف:
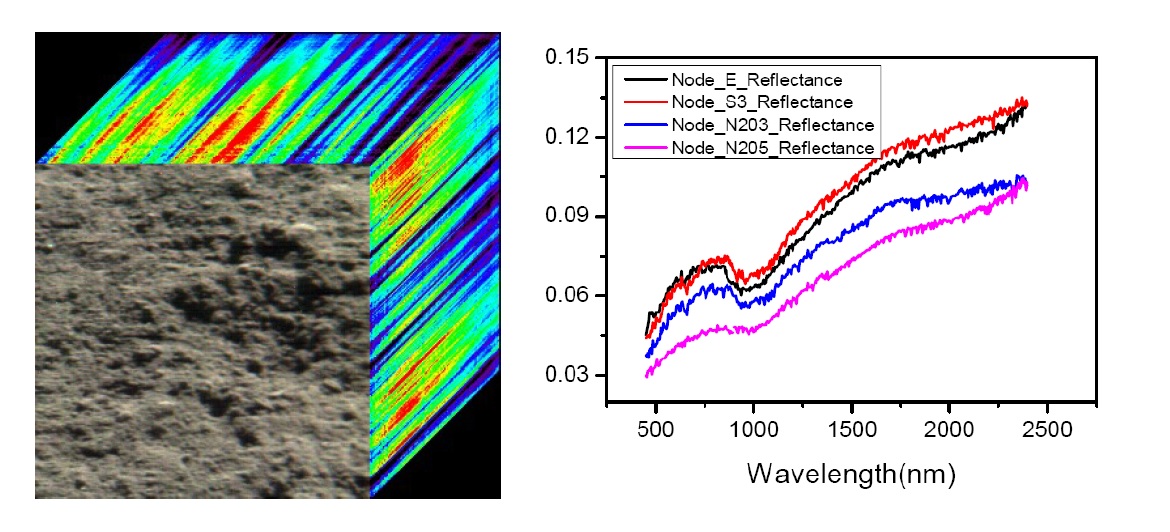
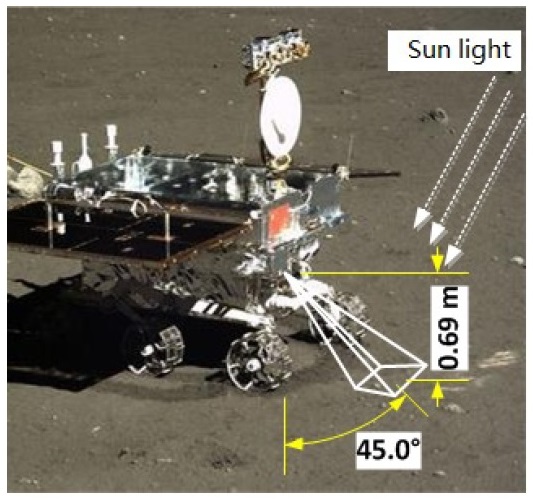
في اليوم القمري الثالث ، انخرطت Yutu-2 rover في الحصول على بيانات علمية باستخدام مطياف VNIS الثابت (مطياف التصوير المرئي والأشعة تحت الحمراء) ، الذي يبلغ عرض مجال استشعاره بضعة سنتيمترات فقط ، لذلك من الضروري تحديد موضع التجويف بدقة وبدقة. Yut-2 "بحيث يمكن إحضار" عين "المطياف إلى المنطقة المرغوبة من سطح القمر لتلقي البيانات الصحيحة من المسافة المثلى.
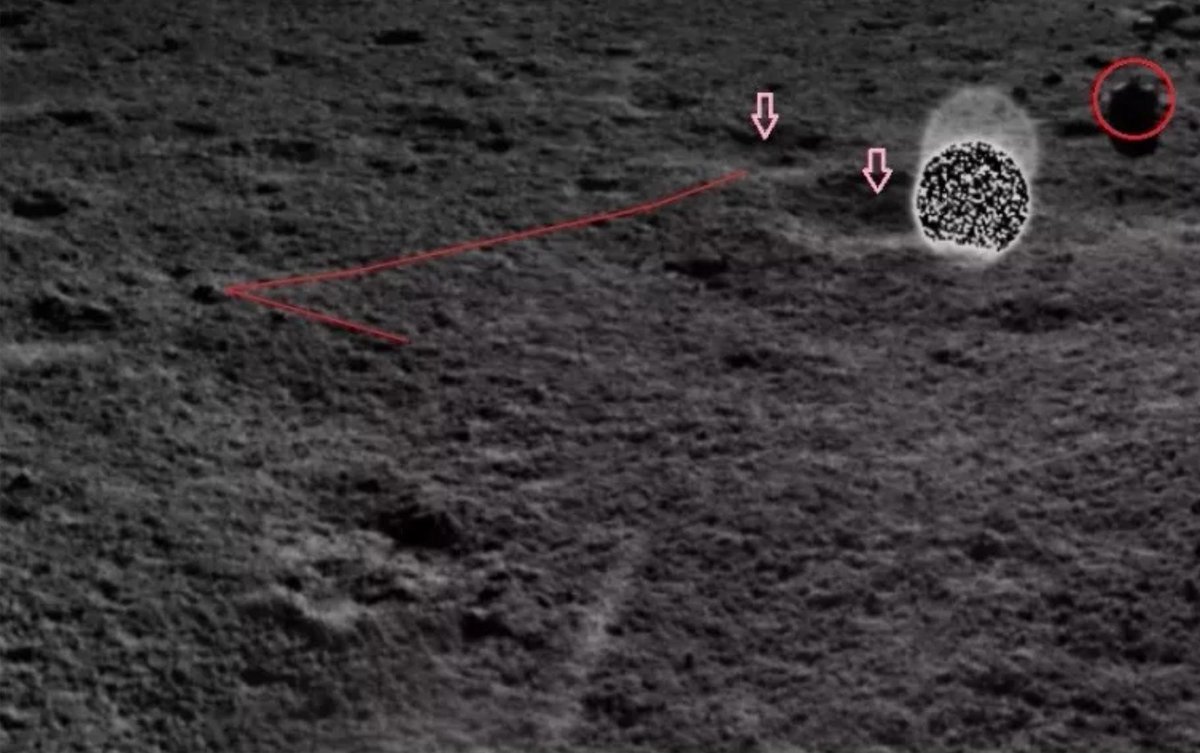
بعد نزهة قصيرة على سطح القمر ، وصلت روفر Yut-2 إلى سطح حجري مثير للاهتمام ، حيث تم اكتشاف حجر كبير يبلغ قطره 20 سم. كان العلماء مهتمين على الفور بهذا الاكتشاف ، وأصله (نيزك ، وتشكيل القمر) وعملية التعليم.
منظر عام لبانوراما السطح أثناء البحث عن الأحجار:

سطح صخري ، بحجر كبير (قطره 20 سم) ، مسافة 120 سم:

صورة أكبر لحجر كبير:


العمل مع مطياف:
علاوة على ذلك ، يتم نقل البيانات باستخدام مطياف روفر Yutu-2 إلى مركز مراقبة الطيران التابع للأكاديمية الصينية لتكنولوجيا الفضاء ، حيث يتم تحليلها وتخزينها وسيتم فتحها أمام المجتمع العلمي.
البوابة الصينية "نظام لنشر وجمع البيانات العلمية والبحث عن القمر والفضاء السحيق" ، والتي سيتم نشر البيانات والصور المستلمة من Chang'e-4 (والبعثات السابقة) ، قد عملت أيضًا.
المسار إلى البوابة :
http://202.106.152.98:8081/moondata/يعد حجم البيانات أيضًا نقطة مثيرة للاهتمام ، على سبيل المثال ، قام ناقل الحركة Yut-2 ، بعد إجراء القياسات باستخدام مقياس الطيف في أربع نقاط مختلفة على سطح القمر ، بإرسال حجم بيانات إجمالي يبلغ 350 ميجابايت.
من المقرر أن تستمر القياسات العلمية لعناصر سطح القمر ونقل البيانات من روفر "Yutu-2" في اليوم القمري الرابع.