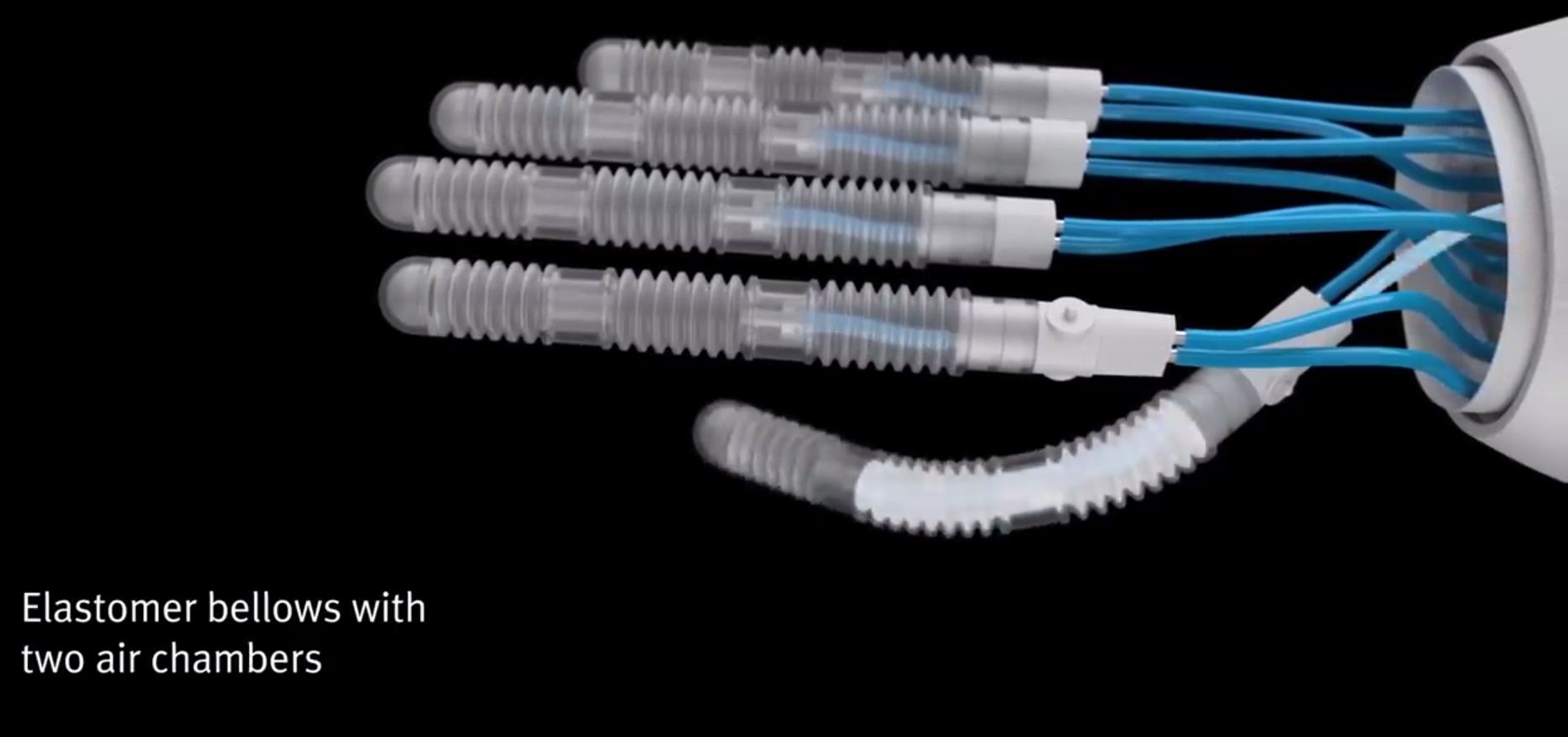
لا يوجد هيكل عظمي في هذا الحل ، اليد مصنوعة من مواد ناعمة ومرنة ، مصنوعة من نسيج الأصابع من نسيج نسيج ثلاثي الأبعاد مع أجهزة استشعار عن طريق اللمس وموصلات مرنة يمكن ثنيها باستخدام وحدات هوائية. يتم تثبيت عقدة مع الصمامات في الرسغ ، والتي تعمل على تحريك عناصر اليد ، إذا لزم الأمر ، مع الحركات الحركية الدقيقة.
يتم التحكم في حركات BionicSoftHand بواسطة الذكاء الاصطناعي ، والقادر على التعلم عن طريق التجربة والخطأ ، وبعد التكيف مع المهمة ، بسرعة وتنفيذ الحكم الذاتي الإجراءات اللازمة مع الأشياء ، على غرار كيف يفعل الشخص

رابط إلى الوصف من الشركة المصنعة للحل
BionicSoftHand هنا .
 تم تجهيز الذراع الروبوتية BionicSoftHand بـ:
تم تجهيز الذراع الروبوتية BionicSoftHand بـ:- منفاخ منفوخة ، يوجد حولها نسيج ثلاثي الأبعاد مصنوع من طباعة ثلاثية الأبعاد مصنوعة من ألياف مرنة ، تنحني جنبًا إلى جنب مع حركات اليد عند تغذية الهواء في الخوار ، على غرار عمل العضلات والأوتار ؛
- الوحدات الدوارة الهوائية ؛
- محطة صمام لـ 24 صمام بيزو ؛
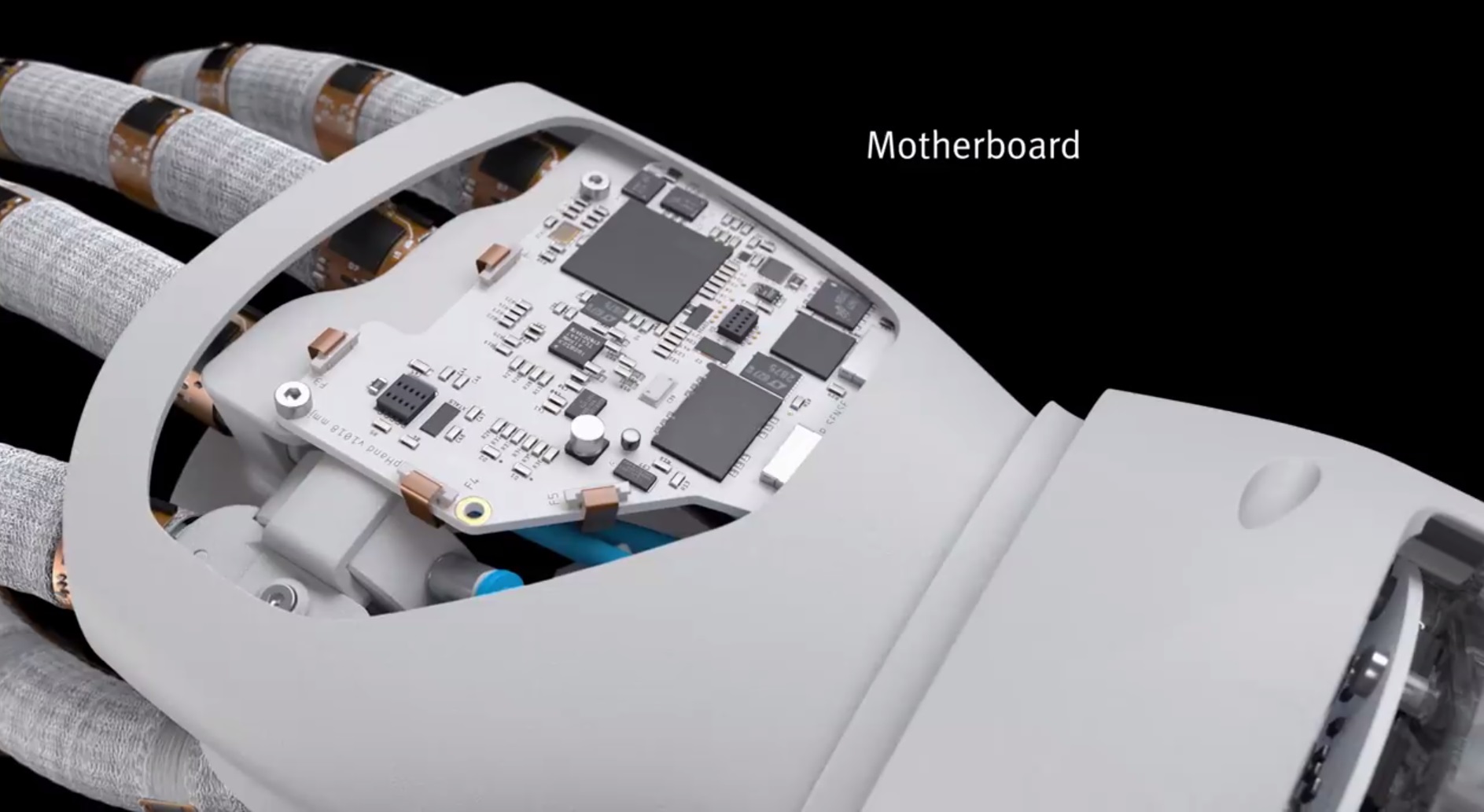
- اللوحة الأم على متن الطائرة ، بما في ذلك التحكم في الحركة المستقلة ؛
- حساسات القصور الذاتي (الحركة) والقوة (المثبتة في أصابع ناعمة) ، والتي يتم إنشاؤها أيضًا على أساس مواد مرنة وقادرة على الانحناء في لحظة الحركة ؛
- وحدة AI للتعلم الذاتي ، قادرة على حساب أفضل طريقة بشكل مستقل للتفاعل مع كائنات مختلفة وتنفيذ إجراءات مختلفة ، وفي أقصر وقت ممكن ، تلقي البيانات من الكاميرات ثلاثية الأبعاد مع إدراك عميق لتحليل الكائنات والحركات.
الخصائص التقنية لمكونات الجهاز:
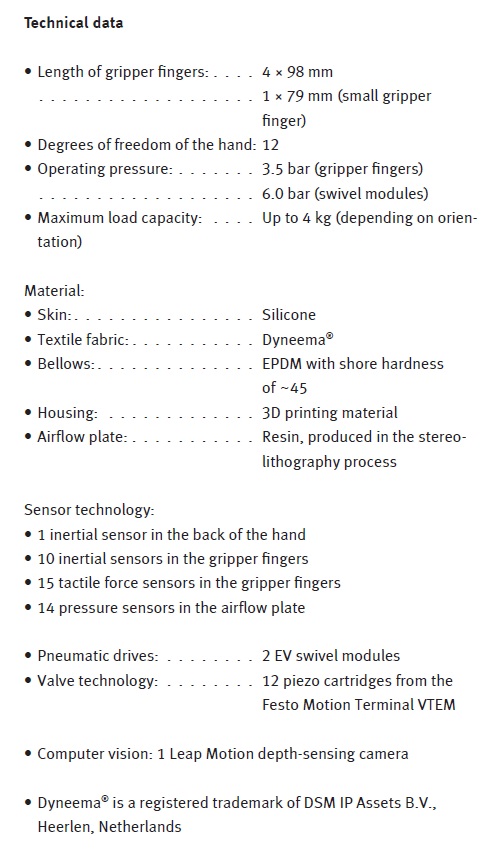


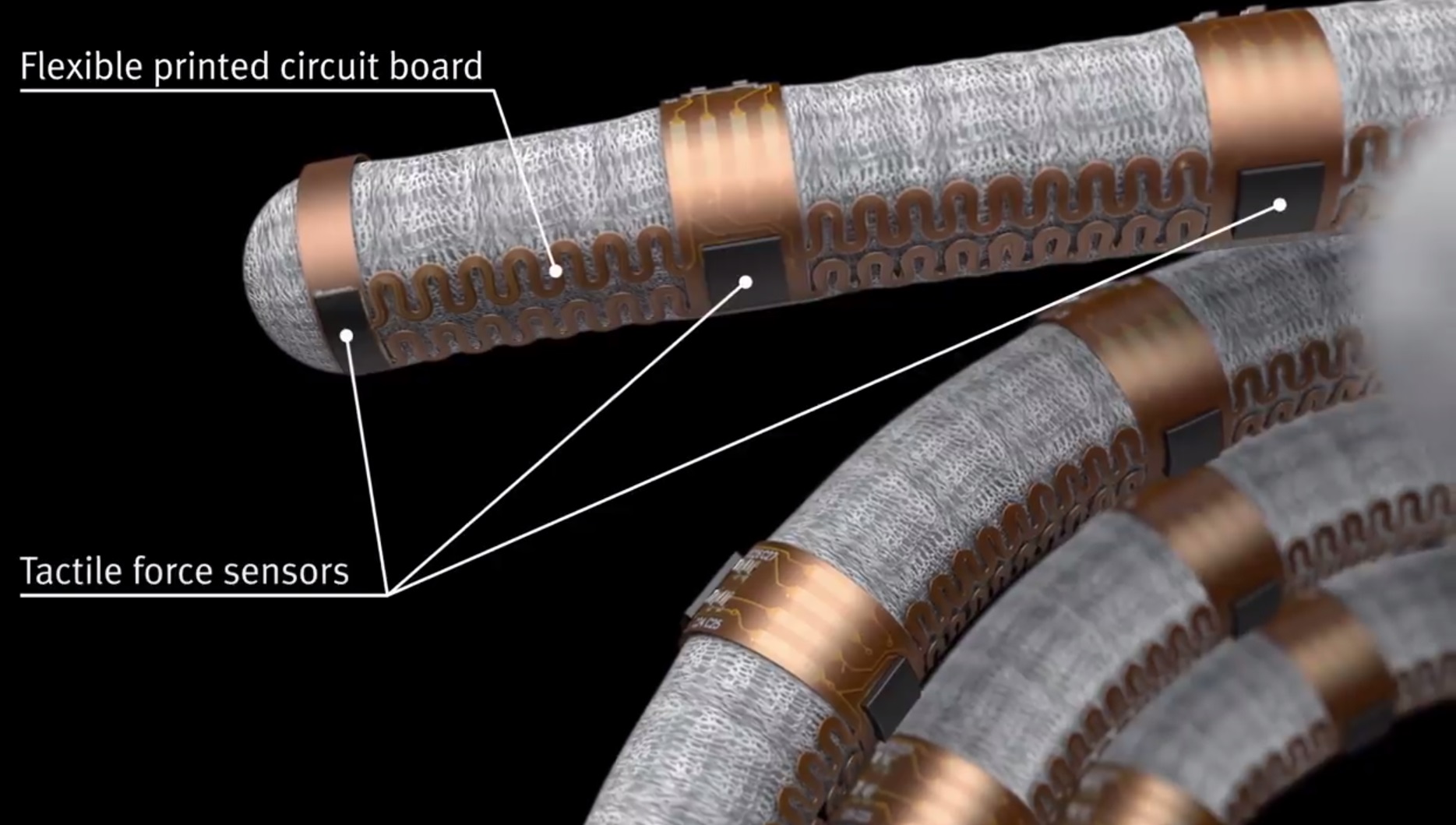





توفر مجموعة من مستشعرات اللمس على أصابع اليد ردود الفعل على أنظمة التحكم في اليد (مع مكونات AI) ، والإبلاغ عن حركات اليد والأصابع ، وكذلك عن الأساليب والحركات في اتصال مع كائنات مختلفة ، نفس AI يحلل المعلومات حول ما إذا كانت صحيحة يوجد كائن في يده للتلاعب به ، وذلك باستخدام مصفوفة إدراك التلامس ، وتقليد حاسة اللمس للشخص. علاوة على ذلك ، يحسب الذكاء الاصطناعي الجهود التي يجب بذلها لعقد هذا الموضوع ، ونوع التسلسل الحركي الذي يجب القيام به لمواقع وحركات الأصابع ، ومدى اتساع فتحة النخيل ، وما إلى ذلك.

في البداية ، لم تكن يد BionicSoftHand مبرمجة لأي حركات محددة ، ويتم تدريب منظمة العفو الدولية المتصلة بلوحة التحكم الخاصة بها على أداء مهام الاختبار باستخدام تقنية التعليم الموازي ، وخلقها في بيئة افتراضية ، مع مرور الوقت ، مما يتيح للذراع الآلية أن تصبح "أكثر ذكاء" فقط ، ولكن من أجل حلول للمشاكل الجديدة لاستخدام مجموعات من الحركات التي تمت دراستها بالفعل والتحقق منها من خلال إجراءات حقيقية ، والتي يتم بعد ذلك تحسينها لمهام جديدة.

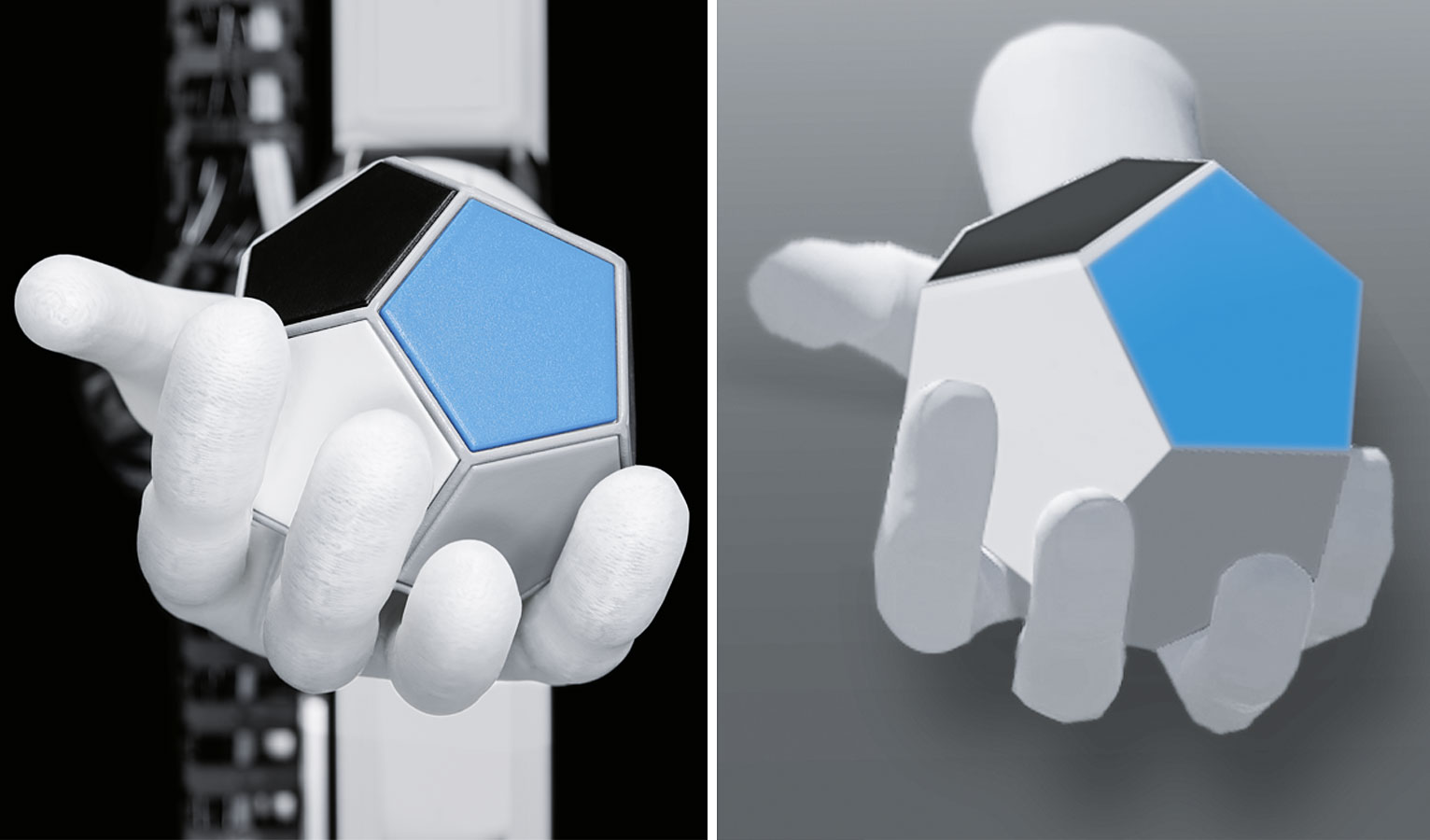

في مقطع الفيديو التوضيحي أدناه ، تم تكليف أجهزة الذكاء المزودة بذراع آلية بمهمة تحريك الكائن ذي 12 جانبًا الموضوعة في اليد حتى يتم رفع وجه معين دون شرح الخطوات لإكمال هذه المهمة.
أولاً ، باستخدام كاميرا ثلاثية الأبعاد ذات إدراك عميق ، تقوم AI بإنشاء نسخة رقمية من الكائن ، ثم تضعها في محاكاة افتراضية مع العديد من الأيدي الافتراضية التي تتعامل مع الكائن حتى يتم تحديد المجموعة الصحيحة.
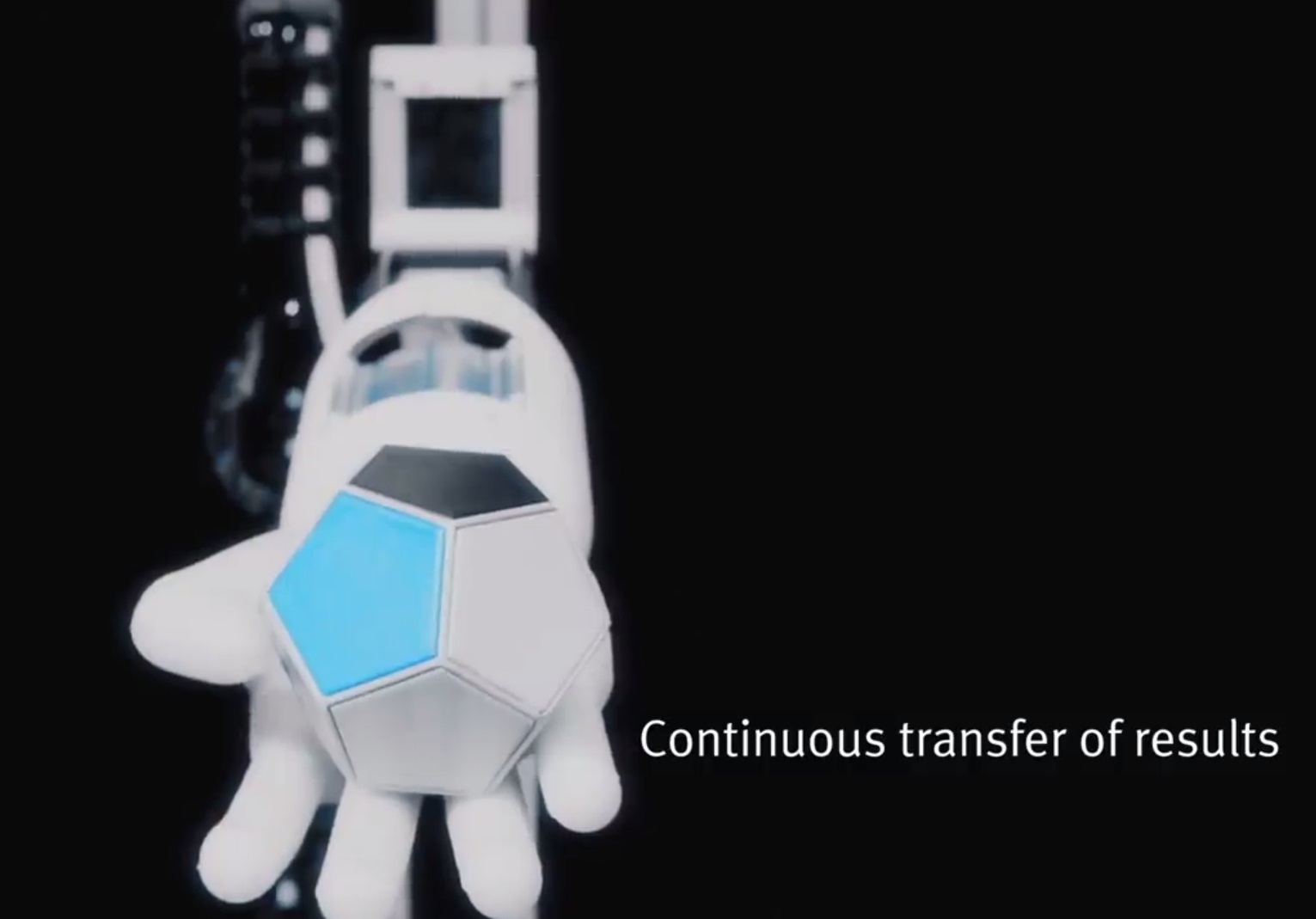
ثم يحسب الذكاء الاصطناعي الخيارات لإيجاد وتنفيذ الإجراءات المثلى بسرعة مع الموضوع ، ثم يقوم بها في الواقع ، والتحكم في عناصر BionicSoftHand.
مكونات لخلق إلكترونيات Evgeny Veltistov أقرب وأقرب إلى الواقع.