لفائدة الناس ، تحتاج الروبوتات إلى تعلم كيفية المشي كما نفعل.

لعقود عديدة ، كانت الروبوتات قادرة على المشي على قدمين. اليوم ، يمكن لأكثر روبوتات البشر تطوراً أن تمشي على الأسطح المنحدرة والمنحدرة ، وتسلق وتنزلق السلالم وتشق طريقها فوق التضاريس الوعرة. البعض يعرف كيف يقفز. ولكن على الرغم من هذا التقدم ، لا تزال الروبوتات ذات الأرجل لا يمكن مقارنتها من حيث البراعة والكفاءة والموثوقية مع الأشخاص والحيوانات.
تستهلك روبوتات المشي الحالية الطاقة وتنفق الكثير من الوقت في التدريب. في كثير من الأحيان فشلوا وكسروا. لكي تصبح المساعدين الآليين الذين كنا نحلم به لفترة طويلة ، سيتعين على هذه الآلات أن تتعلم السير كما نفعل.
نحن بالتأكيد بحاجة إلى إنشاء روبوتات بأرجل ، لأن عالمنا مصمم للأرجل. نحن نمر بالاختناقات ونلتف حول العقبات ونصعد ونهبط الدرج. يصعب على الروبوتات على عجلات أو اليرقات التحرك في تلك الأماكن التي قمنا بتكييفها من أجل أجسامنا.
والعديد من روبوتات البشر لديهم أرجل تبدو مثلنا - بالوركين والركبتين والكاحلين والقدمين. لكن هذا هو المكان الذي تنتهي فيه أوجه التشابه. على سبيل المثال ، إذا قارنا القوة التي يضغط فيها الروبوت على الأرض بالقوة نفسها عند البشر ، فقد تبيّن أنهم غالبًا ما يكونون مختلفين جدًا. معظم روبوتات البشر ، التي نشأت من أمثلة مبكرة للأسلحة الروبوتية الصناعية ، تتحكم في الأطراف بحيث تتحرك بدقة عبر مسارات محددة سلفًا. ومع ذلك ، فإن التحرك على قدمين لا يتطلب الكثير من التحكم في الموقف مثل التحكم في القوة ، ويشتمل على مجموعة واسعة من المرونة والمرونة - المعروفة في الروبوتات باسم الامتثال ، والتي تتيح لك التعامل مع جهات الاتصال غير المتوقعة.
تحاول العديد من مجموعات البحث إنشاء روبوتات أقل صلابة يمكنها التحرك بطريقة أكثر ديناميكية تشبه الإنسان. من المحتمل أن يكون الأكثر شهرة بين هذه المشاريع هو
Atlas من
Boston Dynamics ، وهو شخص بشري قادر على الركض على أرض صلبة وناعمة ، والقفز فوق جذوع الأشجار وحتى القيام بالردود الخلفية. لكن مرة أخرى ، عند مقارنة حركة أكثر الروبوتات تعقيدًا مع الحيوانات ، نرى أن الآلات ليست كافية.
ما الذي نفتقده؟ التكنولوجيا ليست المشكلة الأكبر: المحركات قوية بما فيه الكفاية ، والمواد قوية بما فيه الكفاية ، وأجهزة الكمبيوتر سريعة بما فيه الكفاية. القيد ، على ما يبدو ، هو فهمنا لكيفية عمل المشي.
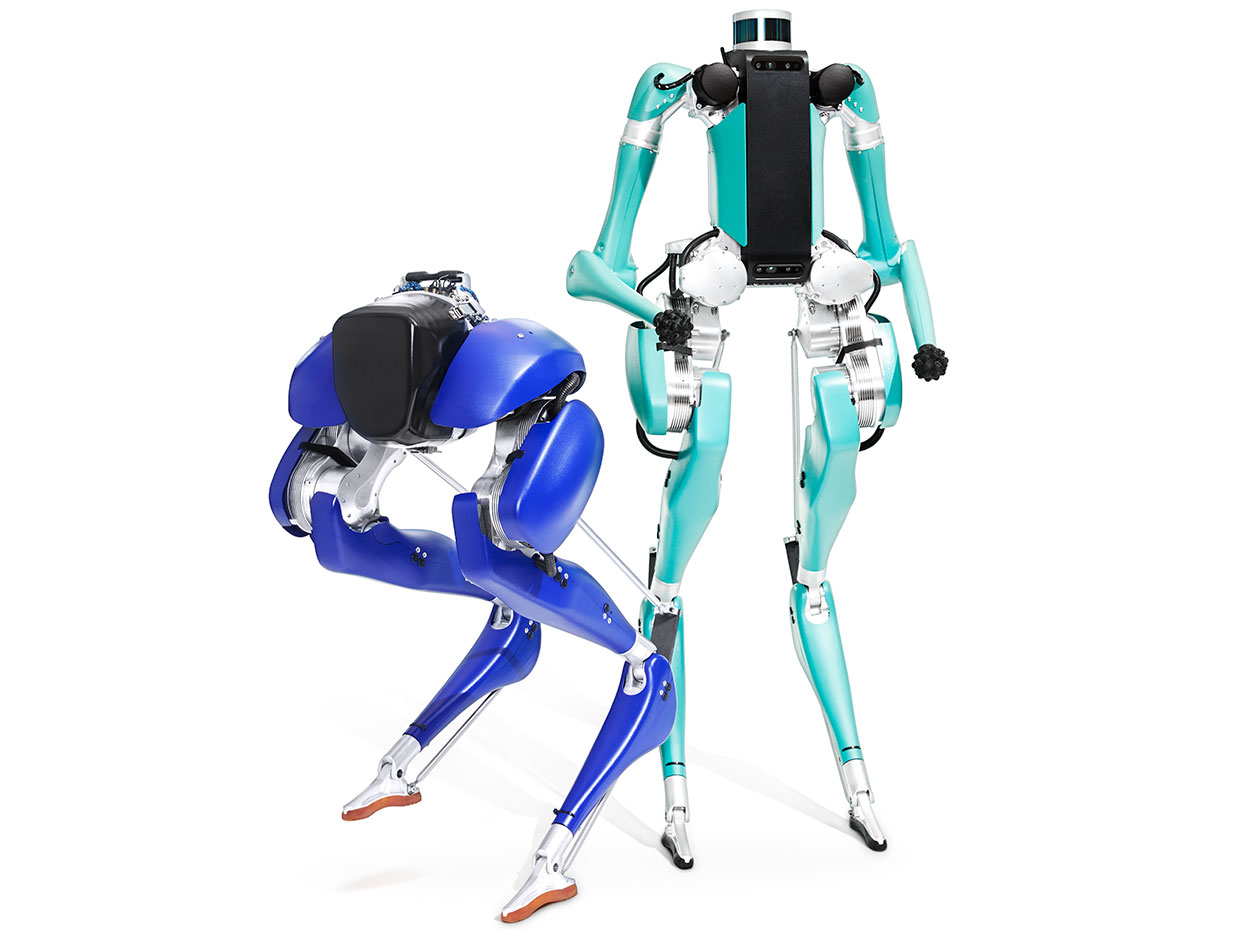 كاسي روبوتات (يسار) وأرقام من أجيليتي روبوتيكس
كاسي روبوتات (يسار) وأرقام من أجيليتي روبوتيكسفي مختبر الروبوتات الديناميكي بجامعة أوريغون ، قمت بقيادة فريق من الباحثين يحاولون معرفة المبادئ الأساسية للمشي وتطبيق هذه الاكتشافات على الروبوتات. أنا أيضًا المؤسس المشارك ومدير التكنولوجيا في
Agility Robotics ، وهي شركة ناشئة في ألباني بولاية أوريغون ، تدرس الاستخدام التجاري لروبوتات المشي. في عام 2017 ، فتحنا العالم لكاسي ، منصة ثنائية الأرجل التي بعناها إلى العديد من فرق البحث. قريباً سيكون بإمكان روبوتنا الجديد دخول العالم: أرجل Digit تشبه أرجل Cassie ، لكن لديه مجسات وزوج من الأيدي ، يستخدمها لتحقيق الاستقرار ، وفي المستقبل للتلاعب.
في المختبر وفي الشركة ، نعمل على خلق مستقبل يمكن أن تذهب فيه الروبوتات إلى أي مكان يستطيع الناس. أعتقد أن الروبوتات ذات الأرجل الديناميكية ستكون في يوم من الأيام قادرة على المساعدة في رعاية المسنين في منازلهم ، والمشاركة في عمليات الإنقاذ في حالة الحرائق والزلازل ، وتوصيل الطرود إلى منازلهم. سوف تسمح روبوتات الساق أيضًا بإنشاء هياكل خارجية وأطراف اصطناعية تساعد على زيادة تنقل الأشخاص ذوي الإعاقة. أنها في النهاية تصل الروبوتات الخيال العلمي إلى واقع ملموس.
بعض الطيور تعمل بشكل أفضل مما تطير ، أو حتى لا تطير على الإطلاق. النعام والديك الرومي والطيور الغينية والسمان لا يمكن أن يرتفع مثل الصقر ، ولكن التحرك بسرعة سيرا على الأقدام. قضى زملائي من المختبر ومونيكا ديلي من الكلية البيطرية الملكية بجامعة لندن ساعات لا حصر لها في مراقبة الطيور التي تمشي وهي تدور حول المختبر. نريد أن نفهم كيف تكون هذه الحيوانات قادرة على التحرك بأسلوب رشيق وفعال - ومع ذلك فإن معظم هذه الآلات المصنّعة بالريش تعمل على البذور!
في إحدى التجارب ، يمتد طير غينيا على طول مسار ، ثم يخطو على ثقب متنكّر في شكل قطعة منديل. لم يكن الحيوان يعلم أنه سيدخل في حفرة ما يقرب من نصف طول ساقيه ، ومع ذلك ، لم يتعثر ، وساقه ممتدة ومتكيفة مع الأخدود الهارب. في هذه العملية ، يحدث شيء رائع: عقل الطائر لا يحتاج إلى الإحساس والرد على السخط ، لأن ساقيه تتعاملان معه.
هذا يعطي فكرة مهمة لمطوري الروبوت: إذا قمت بإنشاء روبوت لأول مرة ، ثم قررت برمجته لحركات رشيقة ، فلن تنجح. كما هو الحال مع طيور غينيا ، ستأتي براعة الروبوت في الغالب من الخواص الميكانيكية لجسمه ، والتي يطلق عليها الروبوتات ديناميات سلبية. ويتم إهماله في معظم المشروعات لتطوير الروبوتات ذات الأرجل. من خلال تطوير الديناميات السلبية للروبوت بعناية بالتوازي مع ملء البرنامج ، ودمجها في نظام متكامل ، فإنك تزيد من فرص اقتراب الروبوت من خصائص الحيوان.
تجدر الإشارة إلى أنه على الرغم من أننا نستلهم الحيوانات ، إلا أننا لا نعيد إنتاج شكل قدم الطائر أو بناء العضلات والعظام في القدم البشرية. نريد أن نفهم فيزياء الحركة الحيوانية وأن نستمد منها نموذجًا رياضيًا مجرَّدًا يمكن فهمه والتحقق منه في محاكاة الكمبيوتر وتجسيده في روبوتات حقيقية. لأنه عند إنشاء روبوتات نستخدم المعادن والإلكترونيات بدلاً من العظام والأدمغة ، يمكن أن تكون مختلفة تمامًا عن الحيوانات ، باستخدام نفس الفيزياء.
يصف أحد أبسط النماذج الرياضية كتلة نقطة (جذع) متصلة بزوج من الينابيع المثالية (الأرجل). هذا النموذج الشامل للكتلة مبسط بالطبع. يشبه الرجل الصغير من الشرطات ولا يأخذ في الاعتبار وجود المفاصل عند القدمين ، أو حقيقة أن القدمين لا تمس الأرض عند نقاط معزولة. ومع ذلك ، فإن نموذج كتلة الربيع يمكن أن ينتج نتائج غير متوقعة. في المحاكاة ، يمكنها إعادة إنتاج جميع مسارات المشي التي يستخدمها الناس والحيوانات تقريباً للمشي والجري.
 الخطوات الأولى: أرجل روبوت ATRIAS ليست بشرًا ، لكنها كانت أول آلة تُظهر مشية تشبه الإنسان
الخطوات الأولى: أرجل روبوت ATRIAS ليست بشرًا ، لكنها كانت أول آلة تُظهر مشية تشبه الإنسانلاختبار نموذج كتلة الزنبرك ، قمنا بتطوير روبوت biped
ATRIAS ، واسمه هو اختصار افتراضنا الأساسي:
افترض أن روبوت هو كرة [تخيل أن الروبوت هو كرة]. كانت الفكرة هي أن الديناميات السلبية للروبوت يمكنها إعادة إنشاء نموذج الكتلة النقطية بأرجل الربيع بأدق ما يمكن.
تتكون كل ساق من قضبان من ألياف الكربون الخفيفة مجمعة في متوازي الاضلاع ، يُعرف باسم الوصلة الأربعة المفصلية. يقلل
هذا الهيكل من كتلة الساقين والقصور الذاتي ، مما يجعل النظام أقرب إلى نموذج الكتلة الربيعية. لقد زودنا الجزء العلوي من الساقين بزنبركات مصنوعة من الألياف الزجاجية ، وأدركنا فعليًا "زنبرك" النموذج ، ومعالجة الاصطدامات مع الأرض وتخزين الطاقة الميكانيكية.
في البداية ، كانت ATRIAS بالكاد تقف ، وقد دعمناها بمقود علوي. لكننا قمنا بتحسين وحدة التحكم التي تتعقب سرعة وميل الجسم ، وبدأ الروبوت أولاً في اتخاذ الخطوات الأولى ، ثم التجول بحرية حول المختبر. ثم تعلمت ATRIAS التعافي من الاضطرابات - في تجربة واحدة ، ألقى طلابي كرات عليه. أخذنا ATRIAS أيضًا إلى ملعب كرة القدم الجامعي ، وسرّعه إلى سرعة قصوى تبلغ 7.6 كم / ساعة ، ثم توقف بسرعة.
لفهم ما كان يقوم به الروبوت بشكل أفضل ، تخيل أنك كنت معصوب العينين ، وأنت تمشي على ركائز ، وأن جسمك مغطى بالسجاد ، ولا يمكنك استخدام يديك لتحقيق التوازن. يمكنك فقط الذهاب أبعد من ذلك - وهذا ما فعلته ATRIAS. يمكنه حتى التغلب على العقبات ، على سبيل المثال ، مع مجموعة من الحطب في الطريق.
وعلى الرغم من أن البراعة كانت مكونًا مهمًا ، فقد كان من المهم جدًا أيضًا توفير الطاقة. أكدنا فعالية تكلفة الروبوت من خلال قياس معلمة تعرف باسم تكلفة النقل [COT]. يتم تعريفه على أنه نسبة استهلاك الطاقة (الطاقة) إلى ناتج الوزن والسرعة ، ويستخدم لمقارنة كفاءة استخدام الطاقة في نقل الحيوانات والآلات. كلما انخفض COT ، كان ذلك أفضل. بالنسبة لشخص يمشي ، فإن SOT هو 0.2 ، وفي الإنسان الآلي العادي ، يكون هذا الرقم أعلى بكثير - من 2 إلى 3 ، وفقًا
لبعض التقديرات .
أظهرت تجاربنا أن COT في ATRIAS في وضع المشي هي 1.13 ، مما يدل على
فعالية الروبوتات الديناميكية. وفي الواقع ، يمكن أن تعمل ATRIAS لمدة ساعة تقريبًا تعمل بالطاقة بواسطة عدة بطاريات ليثيوم بوليمر - مثل تلك المستخدمة في السيارات التي يتم التحكم فيها بالراديو.
قمنا أيضًا
بقياس القوة التي يضغط عليها الروبوت على الأرض. وضعنا ATRIAS يزن 72.5 كجم (حوالي حجم الشخص العادي) على منصة الطاقة - وغالبًا ما تستخدم هذه الأداة في الطب الرياضي لقياس مشية الشخص من خلال قياس قوى التفاعل. عند المشي في الروبوت ، سجلنا بيانات عن القوات. ثم أخذ أحد تلاميذي مكان ATRIAS ، وسجلنا خطواته. بعد أن قمت ببناء رسم بياني لاعتماد رد فعل الدعم في الوقت المناسب ، رأينا أنه يتزامن بالضبط مع الرسم البياني للروبوت. بقدر ما نعلم ، هذا هو التطبيق الأكثر واقعية لديناميات المشية الإنسانية للروبوتات اليوم.
أكدت النتائج أنه يمكن تنفيذ نظام ديناميكي بسيط للكتلة في روبوت. له العديد من الخصائص المفيدة ، مثل الكفاءة والموثوقية والمرونة ، ويصل إلى أسفل المشي. لقد حان الوقت لإنشاء الروبوت التالي.
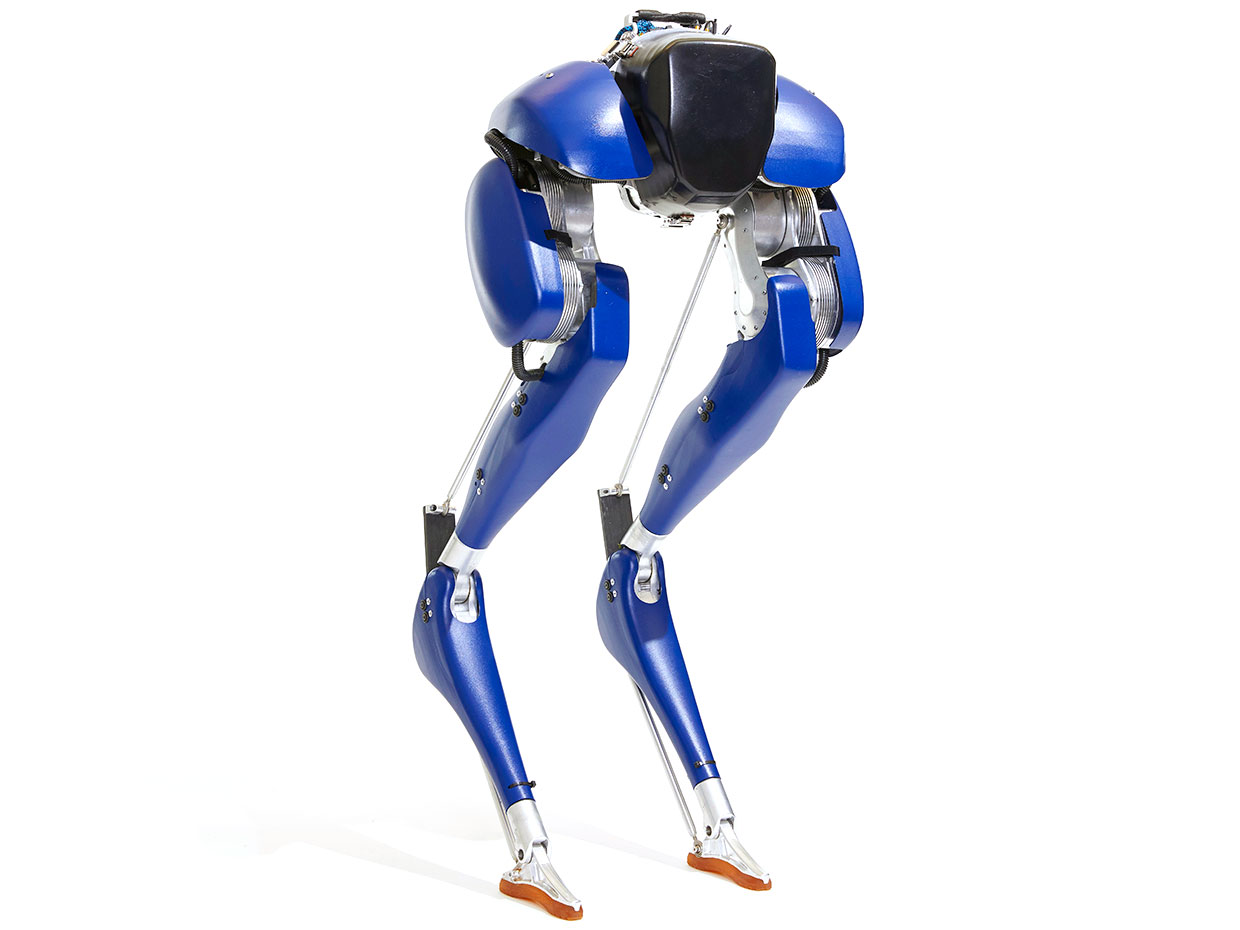 يستخدم Cassie خمسة محركات وينابيع على كل ساق للتنقل حول التضاريس الصعبة.
يستخدم Cassie خمسة محركات وينابيع على كل ساق للتنقل حول التضاريس الصعبة.كاسي ، مثل ATRIAS ، هو روبوت ديناميكي للمشي. لقد قمنا بتحسين جميع جوانب تصميمه من أجل إنشاء روبوت موثوق وقادر مناسب للتسويق. وقمنا بتعيين الشريط عالياً: أردنا أن تتمكن كاسي من المرور عبر الغابة ، والمشي فوق التضاريس الوعرة والعمل لعدة ساعات على طاقة البطارية دون تعليق دعم.
تعتمد Cassie على نفس المفاهيم التي تم استخدامها في ATRIAS ، لكننا قررنا أن نجعل أرجلها جديدة تمامًا. في السابق ، استخدمنا محركين لتشغيل كل وصلة أربعة في كل ساق. يقلل مثل هذا المخطط من كتلته ، لكن هناك عيبًا: أثناء المشي ، تباطأ أحد المحركات من الآخر ، مما أدى إلى فقد الطاقة. أثناء العمل على Cassie ،
درسنا تكوينات الساق الأخرى للقضاء على هذا التأثير. يسمح لك المخطط الجديد بتصغير المحركات ، وأصبح الروبوت أكثر كفاءة من ATRIAS.
من المهم أن نلاحظ أن التكوين الساق كاسي كان نتيجة لهذا التحليل. حقيقة أن القدم يشبه سفح النعامة أو ذوات الأقدام الأخرى قد تشير إلى أننا نسير على الطريق الصحيح ، لكننا لم نسعى لإنشاء روبوت يمكن ، بعد تغطيته بريشه ، أن يضيع في قطيع من الاتحاد الاقتصادي والنقدي.
لكل ساق من Cassie خمسة محاور للحركة - أو درجات من الحرية ، تتحدث بطريقة آلية - ولكل منها محركها الخاص. تتمتع الوركين بثلاث درجات من الحرية ، مثل حريتنا ، والتي تسمح للساق بالتناوب في أي اتجاه. اثنين من المحركات الأخرى لديها محاور في الركبة والقدم. كاسي لديه درجات إضافية من الحرية في أسفل الساق والكاحل. فهي سلبية ، ولا يتم التحكم فيها بواسطة المحركات ، ولكنها مرتبطة بالينابيع ، مما يسمح للروبوت بالانتقال عبر التضاريس الصعبة ، ولا يخضع للإنسانيات ذات الأقدام المسطحة.
تتطلب أرجل Cassie الجديدة إنشاء وحدة تحكم منخفضة المستوى أكثر تطوراً من جهاز ATRIAS. مددت ATRIAS ساقها ، ببساطة باستخدام قوة متساوية وعكس اتجاه عزم الدوران من كلا المحركين. مع Cassie ، تتطلب تحريك الأرجل في اتجاه معين حساب عزم دوران مختلف لمحركات مختلفة. للقيام بذلك ، يجب أن تأخذ وحدة التحكم في الاعتبار القصور الذاتي في الساقين وديناميات المحركات وعلب التروس.
 تستخدم أداة التحكم Cassie الخطوات المخططة والتوازن الديناميكي
تستخدم أداة التحكم Cassie الخطوات المخططة والتوازن الديناميكينعم ، أصبحت مهمة وحدة التحكم أكثر صعوبة ، ولكن هذه الطريقة تسمح لك بالسير بشكل أكثر كفاءة واستخدام مجموعة واسعة من السلوك. يمكن لـ Cassie المشي بسرعات تصل إلى 5 كم / ساعة باستخدام واحدة من وحدات التحكم الأولى. يتراوح استهلاك الطاقة من 100 واط (ثابت) إلى 300 واط (في الحركة) ، وعلى بطارية ليثيوم أيون ، يمكن تشغيله لمدة 5 ساعات. أيضًا ، تسمح الأرجل الجديدة لـ Cassia بالمناورة بطريقة لم تستطع ATRIAS القيام بها. وبفضل المحرك الموجود في مفصل القدم ، يمكنه الوقوف دون الحاجة إلى التحرك باستمرار ، كما فعلت ATRIAS.
يزن Cassie أيضًا 31 كجم ، أي أقل مرتين من ATRIAS. يمكن تحميل جهازي Cassie في صندوق السيارة في أقل من دقيقة. كما أنها أكثر موثوقية: أجزائها مصنوعة من الألمنيوم والألياف الكربونية ، والحافظة الواقية مصنوعة من كلوريد الأكريليك والبولي فينيل البلاستيكي المتين ، وتحميها من التصادم والسقوط.
كاسي ليست قادرة على الركض عبر الغابة حتى الان. لكننا أخرجناها من الخارج بدون تأمين ، وهي تمشي على الأرض ، والأعشاب والأوراق المتساقطة. نحن الآن ندرس مسألة دمج السلوك الديناميكي للروبوت مع
تخطيط الحركة ، مما يتيح له ، على سبيل المثال ، تسلق السلالم. إننا نعمل أيضًا على ميزة أخرى تجعل الروبوتات من نوع Cassie أكثر فائدة: الأيدي.
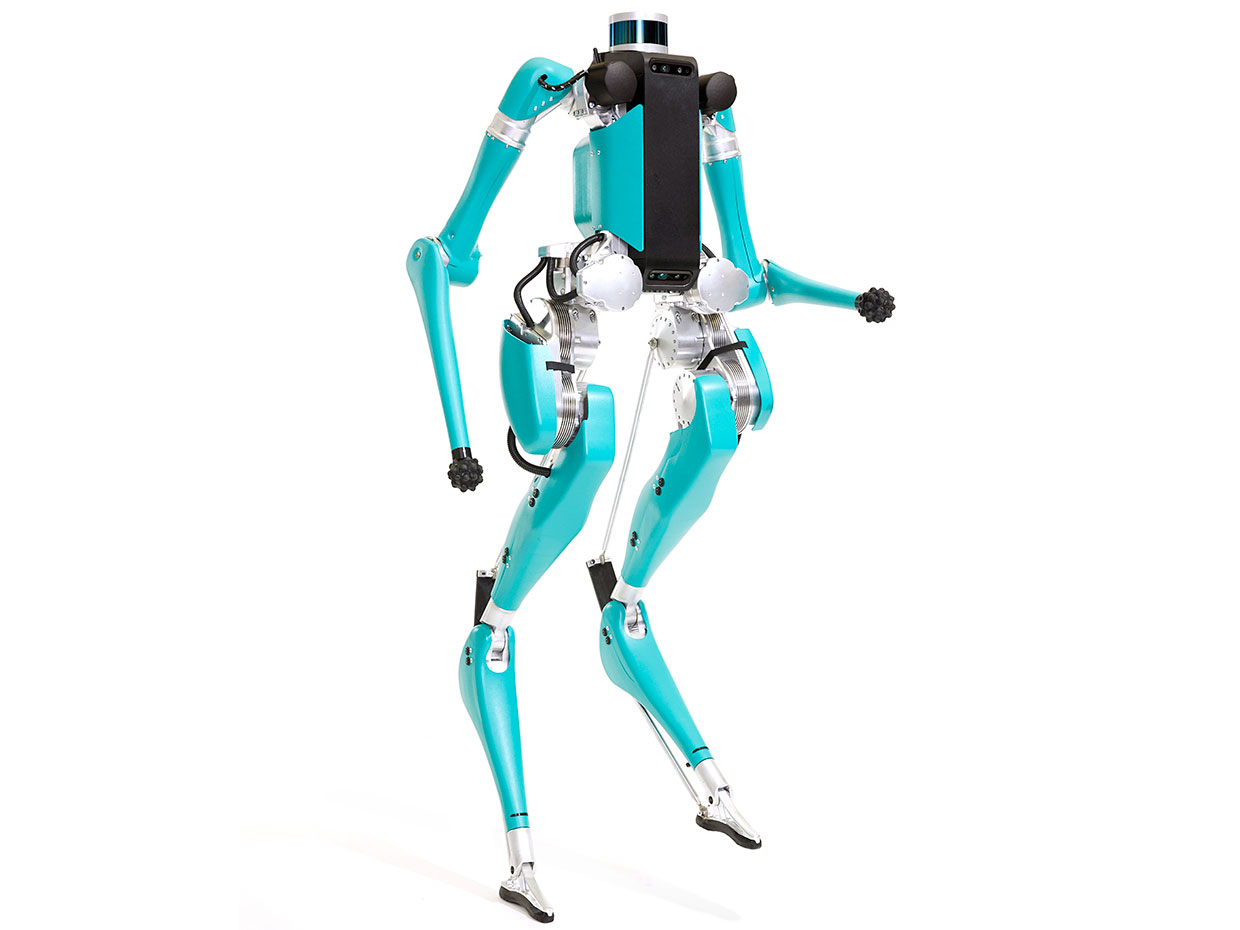 ديجيت لها أرجل ، مثل كاسي ، ولكن لديه أيضًا جسم به مجسات في الداخل وزوج من الأيدي يساعده في الحركة والتوازن.
ديجيت لها أرجل ، مثل كاسي ، ولكن لديه أيضًا جسم به مجسات في الداخل وزوج من الأيدي يساعده في الحركة والتوازن.Digit هو سليل مباشر من كاسي. لديه أرجل مماثلة ، لكننا أضفنا الجذع مع أجهزة استشعار في الداخل وزوج من الأيدي. أنها مصنوعة خصيصا لمساعدته في الحركة والتوازن ، والتأرجح وفقا للمشية. كما يسمحون لـ Digit بدعم نفسه في الخريف وإعادة توجيه جسمه للوقوف.
تحتوي Digit على شيء آخر لا تملكه Cassie: التصور المضمن. أضفنا العديد من أجهزة الاستشعار إليها ، بما في ذلك lidar في الجزء العلوي من الجسم. تساعده المستشعرات في جمع البيانات ، مما يسمح للروبوت بالتحرك في عالم مليء بالعقبات ، على سبيل المثال ، في الغرف والخطوات المزدحمة ، والاعتماد على ديناميات مستقرة فقط في المواقف غير المتوقعة ومع وجود أخطاء في المستشعر.
Digit ، والروبوت مع الساقين التي تأتي من بعده ، لديه الكثير لنتعلمه. لكننا مقتنعون بأنهم سيغيرون العالم. يمكن مقارنة تأثيرها بالسيارات من حيث تغيير نمط حياة الناس وأنماط المرور والمخططات الحضرية ، حيث تعد هذه الروبوتات بتحويل الخدمات اللوجستية وتسليم الطرود.
في المستقبل القريب ، عندما يكون هناك سيارات محمولة ، فإن شركات صناعة السيارات والشركات التي تقدم رحلات مشتركة مثل Lyft و Uber سيكون لديها أساطيلها الضخمة من السيارات التي تحمل أشخاصًا ، وسيكون الحد الأقصى لحركة المرور في ساعة الذروة ، تمامًا مثل اليوم. ولكن ماذا ستفعل هذه السيارات في وقت متأخر من الليل وفي منتصف النهار؟ قد لا تكون خاملاً ، ولكنها تنقل الطرود من المستودعات الآلية إلى باب منزلك. ومع ذلك ، لن تتمكن هذه السيارات إلا من الوصول إلى الرصيف - من الصعب جدًا توصيل الطرود إلى باب بدون شخص. ثم المشي الروبوتات تأتي في اللعب. سوف يركبون مثل هذه السيارات ويمشون على بعد أمتار قليلة. وعلى الرغم من أن العجلات والأجنحة يمكن أن تلعب بعض هذه الأدوار ، إلا أنه في عالم مصمم لساقين ، لن تكون هناك منصة أخرى للحركة مرنة مثل الروبوت على قدميه.
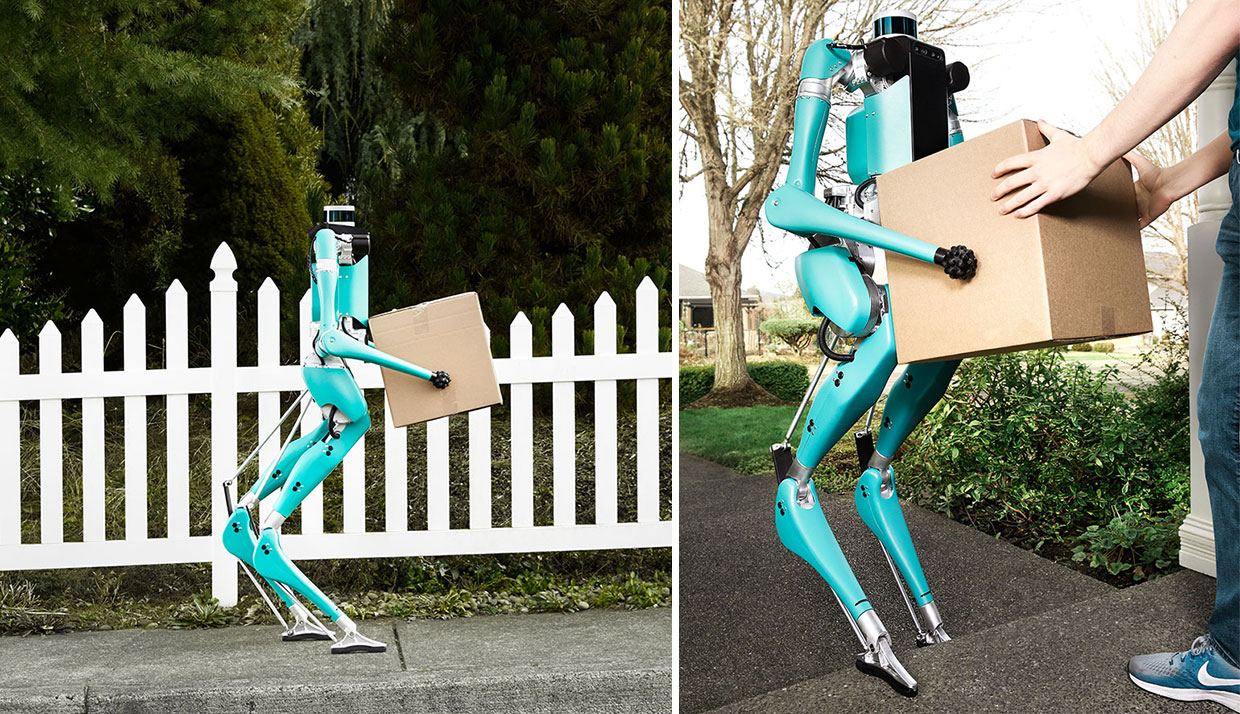 تتعلم Digit السير في تضاريس مختلفة وتسلق السلالم ، حتى يتمكن يومًا ما من تسليم الطرود مباشرة إلى الباب
تتعلم Digit السير في تضاريس مختلفة وتسلق السلالم ، حتى يتمكن يومًا ما من تسليم الطرود مباشرة إلى البابستكون روبوتات التسليم جزءًا من نظام لوجستي متزايد الآلية ، حيث يتم تسليم الحزم من الشركة المصنعة على الفور إلى باب منزلك. سيؤدي هذا النظام إلى تقليل تكلفة التسليم بحيث يكون تسليم الطرود أرخص من شرائها في مستودعات كبيرة مضاءة جيدًا مع إمكانية وصول بشرية. سوف متاجر الجملة الصغيرة تصبح غير ضرورية. سيتمكن الناس ، بالطبع ، من الاستمتاع بالتسوق لبعض الأشياء. ولكن سيتم تسليم المنتجات اليومية بواسطة الروبوتات ، مما يوفر لك الوقت والمال.
سوف تكون الروبوتات ذات القدمين قادرة على اختراق منازلنا ومكاتبنا. يمكنهم المشي في الطابق العلوي وفي الغرف المزدحمة ، والتفاعل مع الأشخاص بمستوى عين آمن وعلى نطاق إنساني ، مما سيتيح لنا التقدم في السن بشكل مناسب في منازلنا. سيساعدون على حمل الأشياء وسيعملون كأجهزة للحضور عن بعد ، مما سيتيح لأفراد الأسرة والأصدقاء استخدام الروبوت من أجل التواصل مع الناس عن بعد والحفاظ على صحتهم.
ستكون الروبوتات الموجودة على أقدامها قادرة على الوصول إلى الأماكن الخطرة. وسيقومون بالمظلات في حرائق الغابات لجمع البيانات في الوقت الحقيقي ، والوصول إلى المباني المحترقة بحثًا عن السكان ، ودخول مناطق الكوارث مثل محطة فوكوشيما للطاقة النووية ، واستكشاف المناطق التي يصعب الوصول إليها. سوف يقومون بفحص الأجزاء الداخلية لمحطات الطاقة الكهرومائية والألغام المهجورة بانتظام حتى لا نضطر إلى ذلك.
للوصول إلى هذا المستقبل ، نحن بحاجة إلى حل العديد من المشاكل. لكنني مقتنع بأن مجتمع الروبوتات يمكن أن يجعل هذه التكنولوجيا عملية. ستكون هذه خطوة صغيرة للإنسان الآلي وقفزة كبيرة للبشرية جمعاء.