هذه المقالة مخصصة لطائرة DJI Mavic 2 Pro بدون طيار ، والتي امتلكتها منذ أكثر من ستة أشهر وتحتوي على وصف شخصي للمزايا والمشاكل ، ومجموعة من الصور في المفسدين. يتم تمرير جميع الصور من أجل توفير حركة المرور من خلال
محسن mozjpeg .
كانت أول طائرة بدون طيار في طفولتي هكذا
كان لدي ثلاثة منهم. الأولى لم تقلع ، لأنني فتحت الصندوق على الحافلة في طريقي إلى المنزل وفقدت الأداة التي تحمل اللوحة الصفراء المثلثة العليا التي تحمل الشفرات. في الثانية ، تم فرك الزناد بخيط kapron واللثة بداخله ، مما أدى إلى إعاقة هذا الخيط. عاش الثالث الأطول ، لكنه مهب بالريح.
ثم كانت هناك هذه
المروحية التي لعبت بها في المنزل ، ثم كانت هي نفسها ، لكن مع الكاميرا ، تليها طائرات Syma x5 و x8 pro ، بدون طيار ، أعيد تشغيل هوائياتها البائسة إلى طبيعتها من أجهزة التوجيه اللاسلكي وكانت تعمل بشكل رائع. ثم كان هناك
Walkera QR X350 Pro مع تعليق منفصل للكاميرا والتناظرية الصينية من GoPro ، وأخيراً استأجرت Mavic 1 Pro لمدة يوم وأدركت أنني طوال هذا الوقت كنت أفعل الشيء الخطأ. بالطبع ، اشتريتها لاحقًا وطارت بسرور لمدة عام ، لكن إعلان Mavic 2 Pro حرمني من السلام وميزانيتي - أكثر من ألفي دولار أسترالي.
المشاكل والميزات غير المذكورة في المواصفات أو في الإعلانات
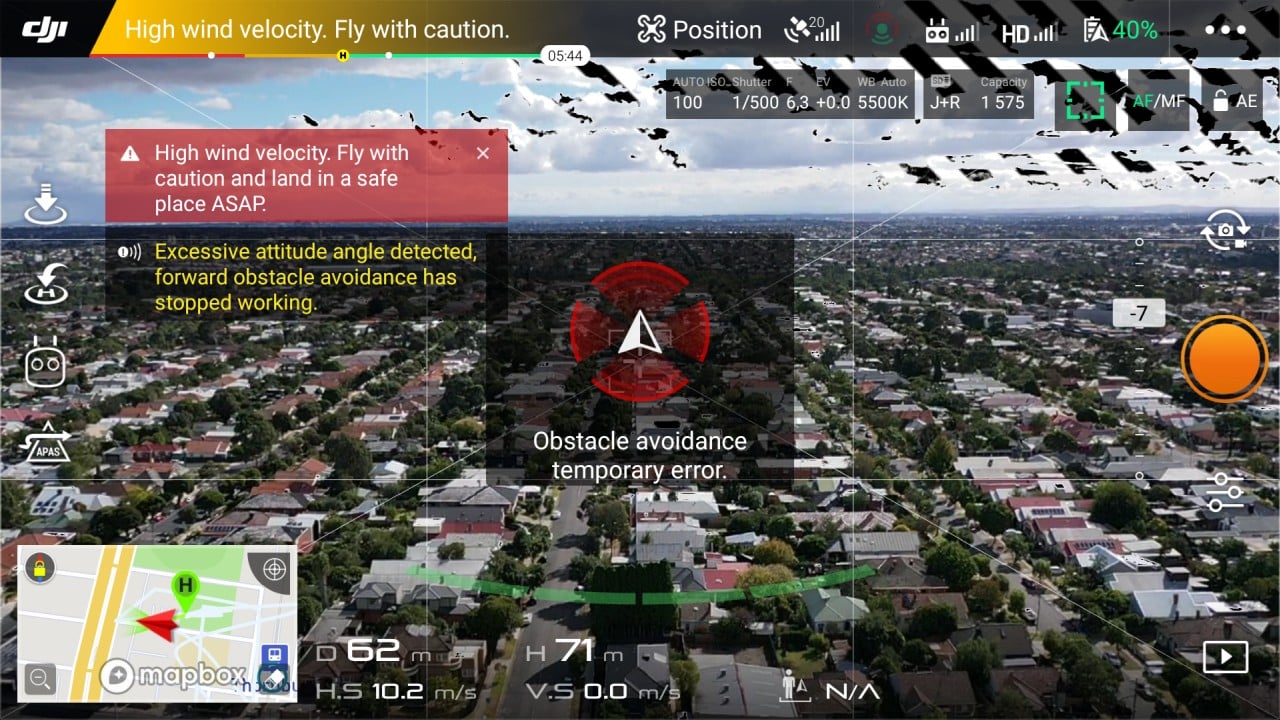
Mavic 2 يطير عادة أسرع من الأولى. بسرعة كبيرة لدرجة أنني اعتدت على ذلك بشكل منفصل ، وإذا ضغطت على الخانق الكامل للأمام مع رياح معاكسة صغيرة - فإن الزاوية الأمامية للبدن تجعل مجسات العائق الأمامي عديمة الفائدة ، كما يخبرنا التطبيق على الهاتف.
تأتي المراوح الموجودة في المجموعة على الفور مع محتوى منخفض من ضجيج
الأسبست ، بينما كانت في Mavik الأولى أكثر بساطة.
صورة المروحة Offtopicظهرت قصة مثيرة مع هؤلاء المراوح - كنت مجموعة من مجموعات سائقي الطائرات بدون طيار على Facebook وكان هناك مجرد موجة من الهستيريا حول هؤلاء المراوح من Mavic Platinum - عشرات المنشورات التي تسأل "هل تستحق الشراء؟" ، "لقد اشتريتها ورائع" ، " لكنني اشتريت ولم أشعر بالفرق "وما إلى ذلك.
بشكل عام ، فإن الجوهر هو هذا: هذه المراوح لها شكل ديناميكي أكثر مثالية وتخلق قوة رفع أكبر من تلك الموجودة في سرعات متساوية. نتيجة لذلك ، من أجل تعليقها فقط ، تحتاج إلى تحريفها ببطء أكثر ، وفقًا لقياساتي الشخصية بروح "زائد / ناقص كيلومتر" - بنسبة 20 ٪.
تم فحصه على النحو التالي - هناك مقياس سرعة الدوران في جهاز التحكم عن بعد ، لكنني كنت أفكر الآن فقط - سرعة أي من المحركات الأربعة التي تظهرها. أعتقد أن متوسط القيمة من كل أربعة. لذلك - مع مراوح الأسهم هناك 530 دورة في الدقيقة ± 50 اعتمادا على الرياح. ولكن مع مراوح باثوس - 420 دورة في الدقيقة ± 50. نتيجة لانخفاض الثورات - الصوت ليس أكثر هدوءًا ، بل هو ببساطة في لهجة أقل ، والذي يُنظر إليه أيضًا على أنه حجم أقل.
الاستماع والمقارنة هنا:
في رأيي الشخصي ، يعطي انخفاض سرعة المحرك عمومًا بضع دقائق إضافية من الرحلة ، حيث يتم استهلاك طاقة أقل. لكن عن قصد ، لم أختبره.
المراوح أنفسهم على يسار Mavic 1 ، على اليمين هو Mavic 2 / البلاتين.

في وحدة التحكم عن بعد ، أصبحت العصي مفكوكة الآن ، مما يقلل من ناحية من فرصة تلف جهاز التحكم عن بعد عند حمله ، من ناحية أخرى ، يمكن إسقاطها وفقدانها. يوجد أدناه موصل USB إضافي (مثل Mavik الأول) حيث يمكنك توصيل الكمبيوتر اللوحي أو الهاتف أو أي شيء آخر ، لكن هذا المنفذ يعمل
فقط إذا قمت بسحب الكبل الجانبي ، حتى إذا لم يكن متصلاً في أي مكان. لقد جعلني ذلك في وقت من الأوقات أظن أن جهاز التحكم عن بُعد كان معيباً ولم يساعده إلا عن طريق الصدفة ، عندما قمت بعد توصيل جهاز التحكم عن بُعد بتوصيل الجهاز اللوحي به بدون سلك جانبي وكان يعمل.
 مجسات العائق
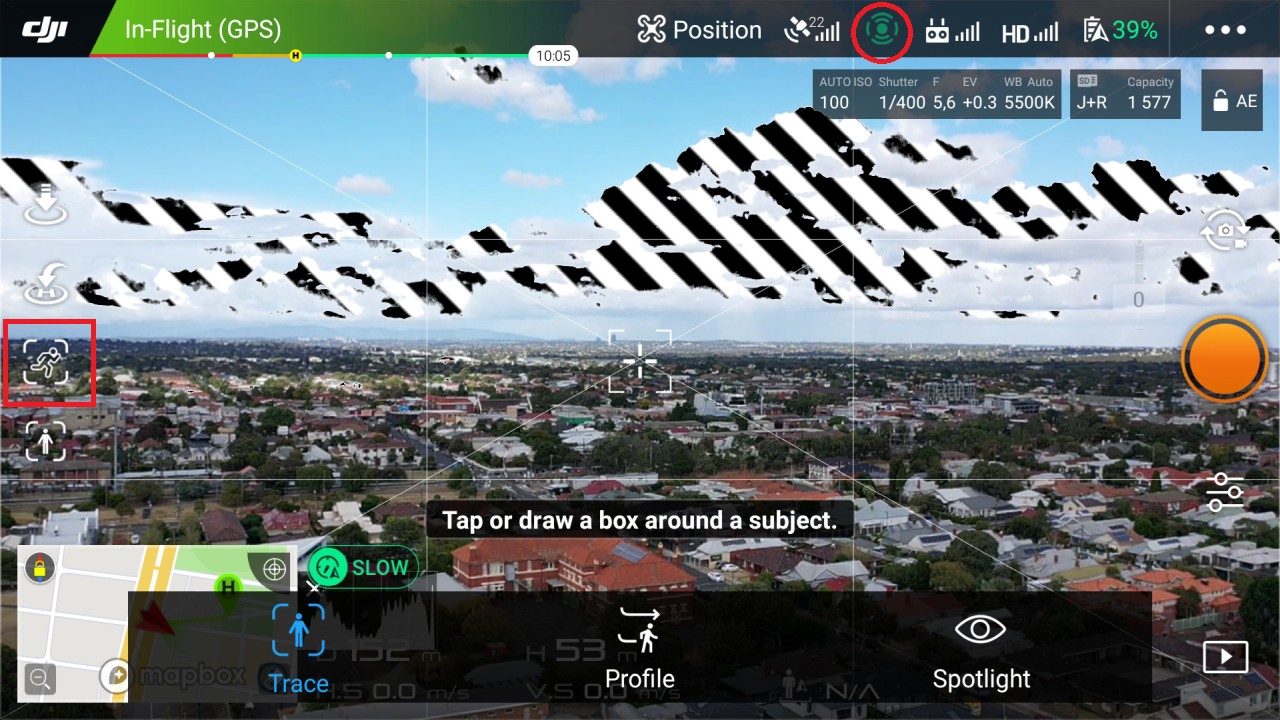
مجسات العائقفي الإعلانات ، هناك تأكيد على حقيقة أن الطائرة بدون طيار معلقة من جميع الجهات بأجهزة استشعار ولن تتعطل في أي مكان. في الواقع ، تعمل جميع أجهزة الاستشعار في وضعين فقط - Active Track و Tripod. في الوضع العادي ، لا تعمل المستشعرات الجانبية ، وفي الوضع الرياضي ، لا شيء على الإطلاق. بالإضافة إلى ذلك ، يحتوي Active Track على أوضاع "بطيئة" و "سريعة" ؛ في الحالة الثانية ، يتم أيضًا عرض تحذير بأنه سيتم تعطيل المستشعرات.
بعض لقطات الشاشةوضع الطيران اليدوي العادي (وضع تحديد المواقع) - تعمل فقط أجهزة الاستشعار الأمامية والخلفية (في الواقع ، لا يزال العلوي والسفلي ، ولكن في هذا الارتفاع لا يهم).

المسار النشط (البطيء) - تعمل جميع المستشعرات.
شخصيا ، في Active Track ، الطائرة بدون طيار غبية على العوائق الجانبية لأنها تحتوي على كاميرا واحدة فقط على جانبيها ، والتي تحدد وجود عقبة ، ولكن ليس المسافة إليها ، لذلك عند الطيران على بعد متر من شجرة ، تتوقف الطائرة بدون طيار وتشتكي من العائق من الجانب ، لا يزعجه على الإطلاق.
بشكل منفصل ، تجدر الإشارة إلى وضع ترايبود (ترايبود).
في البداية ، كان Mavik الأول وقبل تحديث معين للبرامج الثابتة للثاني ، هو الوضع الذي بالكاد تتحرك فيه الطائرة بدون طيار إذا حاولت التحكم فيه ، لكنها في الوقت نفسه تقضي كل جهودها لتبقى بلا حراك على الرغم من الرياح. وضع رائع للصور.
بعد التحديث في هذا الوضع ، يمكنك الآن ضبط سرعة الحركة أفقياً ورأسياً ومنعطفات ، بحيث يمكنك استخدامها لتصوير الفيديو. مكافأة منفصلة هي عمل جميع أجهزة الاستشعار.

كاميرا
هذا الذي بدأ كل شيء.
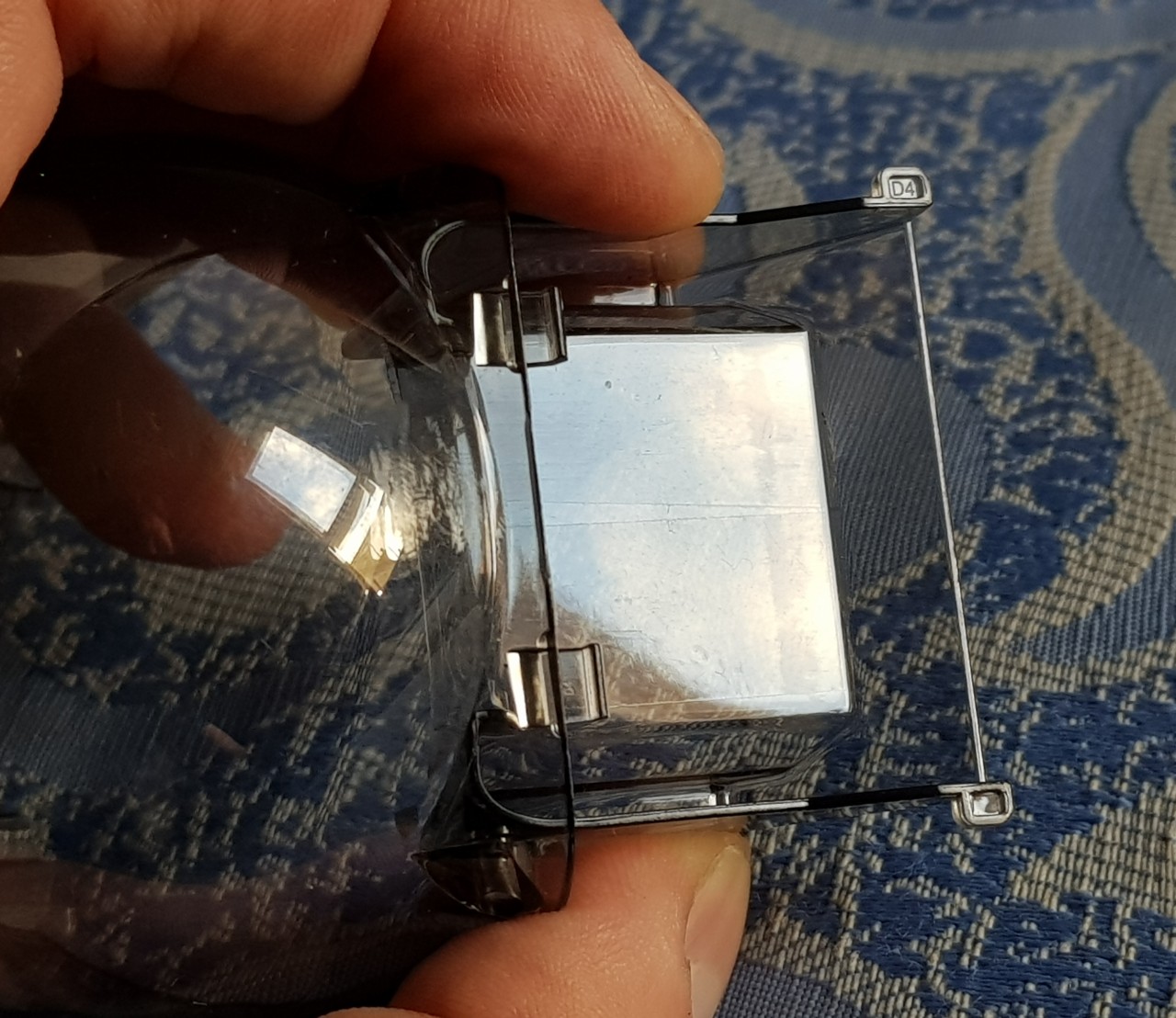
المشكلة الأولى في الكاميرا هي الغطاء البلاستيكي. إنها تخدش الكاميرا في الأعلى في كل مرة أرتديها وأخلع هذا الغطاء.

الحل هو لصق شريط على سطح فرك ضد الكاميرا. إذا نظرت عن كثب ، يمكنك رؤية شريحتين متباعدتين قليلاً. لسوء الحظ ، اكتشفت هذا الأمر بعد فوات الأوان وكان العرض مدلل بالفعل.
المشكلة الثانية هي التغييرات غير المفهومة في إعدادات الفيديو عند تغيير أوضاع الطيران.
في الوضع العادي ، هناك خيارات الفيديو - 2.7K 60fps و 1080p 120fps.
ولكن يجب عليك التبديل إلى وضع Active Track وتختفي هذه الخيارات في مكان ما.
لذا ، إذا كان لديّ فيديو بحجم 2.7K 60 إطارًا في الثانية - عندما أقوم بالتبديل إلى Active Track ، سيكون هناك 2.7 كيلو بت في الثانية. علاوة على ذلك ، يتغير معدل الإطار تلقائيًا ودون أي إخطارات. عند العودة من المسار النشط إلى الوضع العادي ، لا يتغير إلى الوراء ويظل كما هو - 30 إطارًا في الثانية. ليس لدي أي فكرة عن سبب حدوث ذلك وكيف يمكن أن يؤثر وضع الطيران الخاص بالطائرة بدون طيار بشكل عام على إعدادات الكاميرا ، لكنه جعلني منزعجًا للغاية وأفسدت بعض مقاطع الفيديو المهمة. الآن أعلم أنه في كل مرة تقوم فيها بتبديل الأوضاع ، تحتاج إلى التحقق من إعدادات الفيديو.
في وضع Hyperlapse (مثل TimeLapse) يوجد تنسيق فيديو واحد فقط - 1080p 25 إطارًا في الثانية H264 ويتم تسميرها بشدة. وهذا يعني أنه لا يمكنك تغيير أي شيء على الإطلاق ، فلا توجد أزرار لتهيئة الفيديو.
يكمن الحل في تحديد مربع "حفظ الصور المصدر" ، ثم يمكنك إنشاء 4K 120 إطارًا في الثانية منها على الأقل ، ولكن بيديك.
كان من المفترض أن تكون الكاميرا نفسها ، هاسيلبلاد مع جهاز استشعار بحجم بوصة واحدة ، بمثابة قنبلة تُهين مالكي Phantom 4 Pro ، لكن ظهر مقطع فيديو من Cliff Totten من منتدى Mavicpilots على Youtube ، حيث لفت الانتباه إلى مشكلة غريبة في الكاميرا.
الفيديو نفسه على يوتيوب باللغة الإنجليزية
إذا كنت لا ترغب في مشاهدة 35 دقيقة - ضغط قصير:
يثير الفيديو مشكلة الفيديو الموحل في وضع 4K ، والذي يبدو ، وفقًا لكليف ، كفيديو ممتد 2.7K. يفترض Cliff أن DJI واجه مشكلة ارتفاع درجة حرارة المستشعر ولا يمكنه توفير ما يكفي من التبريد في مثل هذه الحالة الصغيرة. كان هذا ، في رأيه ، هو سبب التأخير في تقديم الصورة الأكبر ، وبما أن المشكلة ظهرت قبل الإصدار تقريبًا - فقد ذهبت DJI إلى الحيلة وجعلت وضعي 4K برمجيًا - عادي و HQ. يقوم الأول بتصوير فيديو بحجم 2.7K وتمديده إلى 4K ، وهذا هو السبب في ظهور الصابون ، والثاني هو 4K حقيقي ، لكنه يستخدم جزءًا فقط من وحدات البكسل في منتصف المستشعر ، والذي يشبه مقطع فيديو تم اقتصاصه بزاوية رؤية أقل.
رد DJI الرسمي على هذا الفيديو. TL ؛ DR - كل شيء على ما يرام معنا ، أنت تختبر بشكل غير صحيح.
لقد أجريت نفس الاختبارات باستخدام هدف للصور ولم أجد هذه المشكلة بنفسي (الفيديو عند الطلب). ربما لأن لدي طائرة بدون طيار من الدفعة الثانية ، والأولى التي تواجه مشكلة ، تحطمت مثل الكعك الساخن وفي ملبورن بعد أسبوع من الإصدار ، كان من المستحيل شراء Mavic 2 Pro في أي مكان على الإطلاق - تم بيع كل شيء.
ومع ذلك ، ما زلت لا أقوم بالتقاط الصور بدقة 4K ، لأنه لا يوجد لدي ما أشاهده على مثل هذا الفيديو وأحب 60 إطارًا في الثانية ، لذا 2.7K يكفي بالنسبة لي.
الوضع الليلي. إنه مجرد شيء.
2 ميغابايت من صور ليلة ملبورن آراء عشوائية من أستراليا ، 2.6 ميغابايت استنتاج
بشكل عام ، أنا سعيد للغاية وفي رأيي أن مزايا Mavic 2 Pro تتجاوز عيوبها بشكل كبير. لكنني أعتقد أنه من الجيد معرفة أوجه القصور هذه قبل الشراء وليس بعده.
آمل أن تكون تجربتي مفيدة لشخص ما.