كيف يحلق الوقت! وصل شهر الأرض الرابع من العمل على الجانب البعيد من قمر وحدة الهبوط Chang'e-4 وروفر Yutu-2 بالفعل. نجت الأجهزة من فترة من درجات الحرارة المنخفضة للغاية في الليلة الثالثة المقمرة ، والآن خرجت من وضع السكون وبدأت أبحاثًا جديدة على سطح القمر والفضاء الخارجي.
ما الكاميرات المثبتة على الوحدة النمطية Chang'e-4 و Yutu-2 rover ، وماذا تأخذ الكاميرات في الأيام القمرية الطويلة؟
مواد سبق نشرها حول مهمة Chang'e-4: في الوقت الحالي ، مر 88 يومًا (2212 ساعة) منذ هبوط روفر Yutu-2 على سطح القمر و 115 يومًا (2760 ساعة) بعد إطلاق روفر Yutu-2 من مركبة الفضاء سيشان كجزء من مهمة Chang'e-4 إلى القمر.
اليوم القمري الرابع على الجانب الآخر من القمر:
مدة المخطط لوحدة الهبوط هي سنة واحدة ، روفر - ثلاثة أشهر.
في الواقع ، وصلت روفر Yutu-2 بالفعل إلى الحياة العملية المقدرة بـ 2160 ساعة.
هذا ليس سجلاً لمهمات Chang'e القمرية ، أول مركبة هبوط Chang'e-3 ، والتي كانت في الجزء المرئي من القمر منذ ديسمبر 2013 ، لا تزال تظهر علامات على الحياة (القياس عن بعد وبيانات من مختلف الأدوات) ، ولكن شريكها الهبوط - أول مركبة Yut ، على الرغم من فقدها للتنقل بعد 40 يومًا من بدء العمل الإنتاجي على سطح القمر ، حتى منتصف عام 2016 نقلت البيانات إلى مركز عملائي في وضع ثابت.
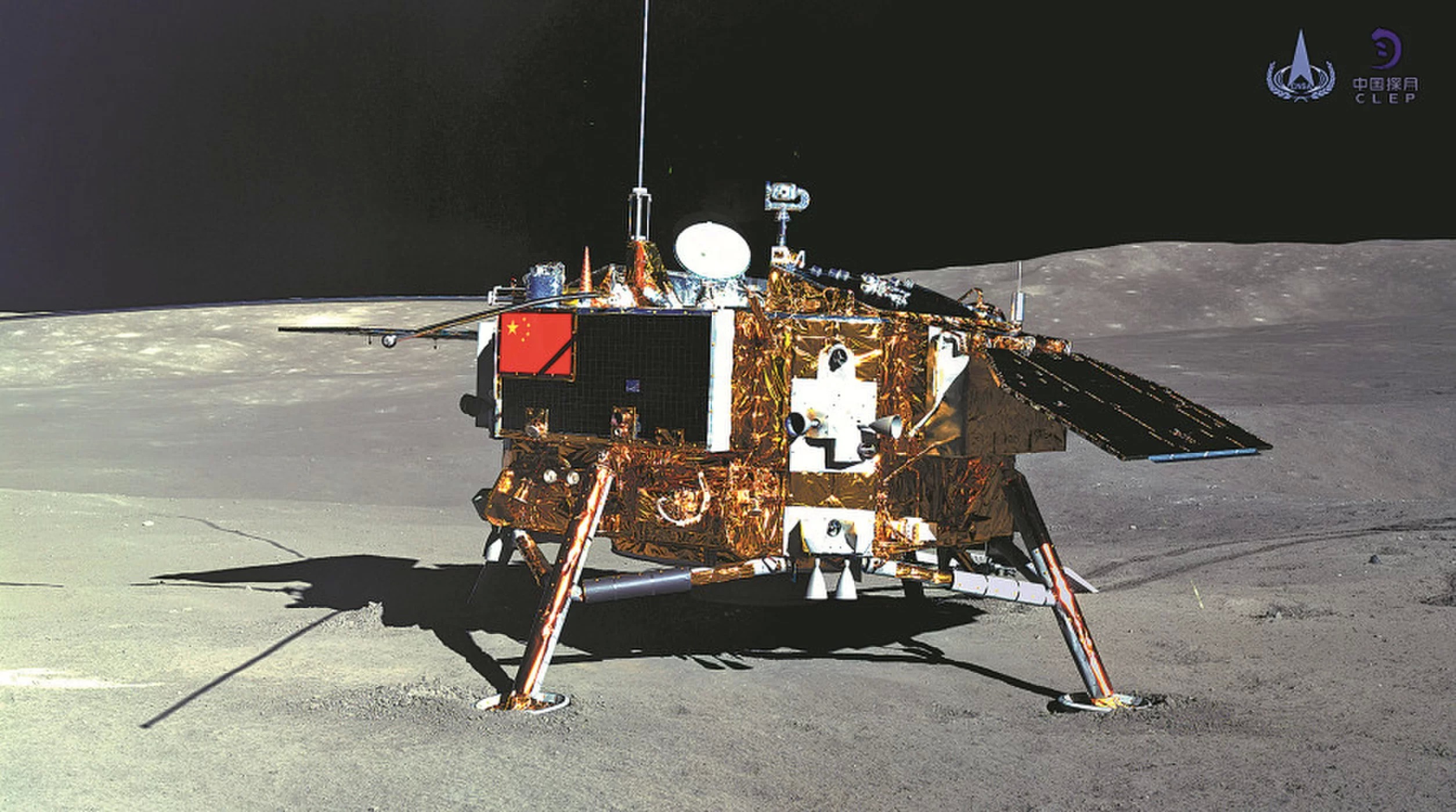
بيانات عن وحدات المهمة القمرية "Chang'e-4":- وحدة الهبوط "Chang'e-4" (4.4 متر بين دعامات الهبوط المعاكسة ، الوزن 1200 كجم) ؛
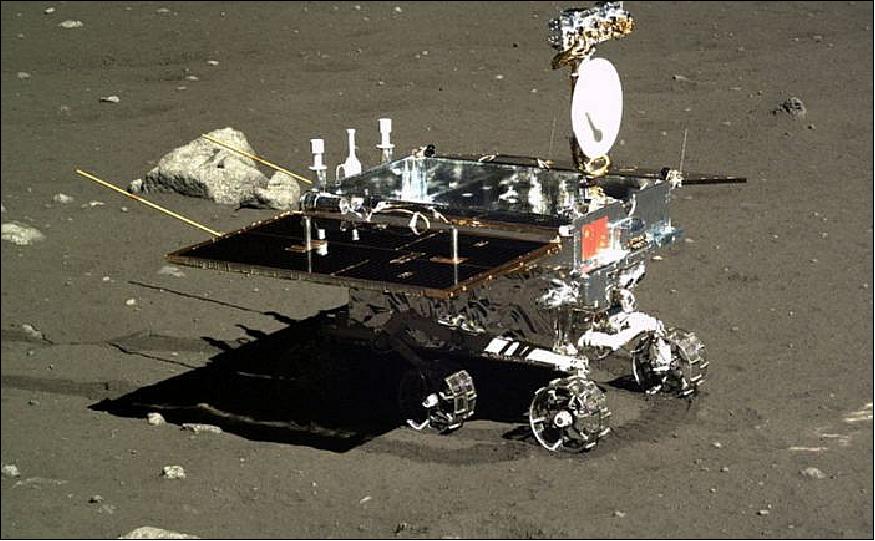
- Yutu-2 rover (ارتفاع 1 متر ، عرض 1 متر (بدون الألواح الشمسية) ، طول 1.5 متر ، لوحان شمسيان قابلان للطي ، ست عجلات ، وزن 140 كجم.
 صور جديدة من الجزء الخلفي من القمر
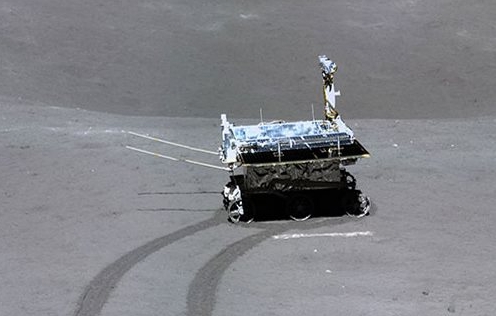
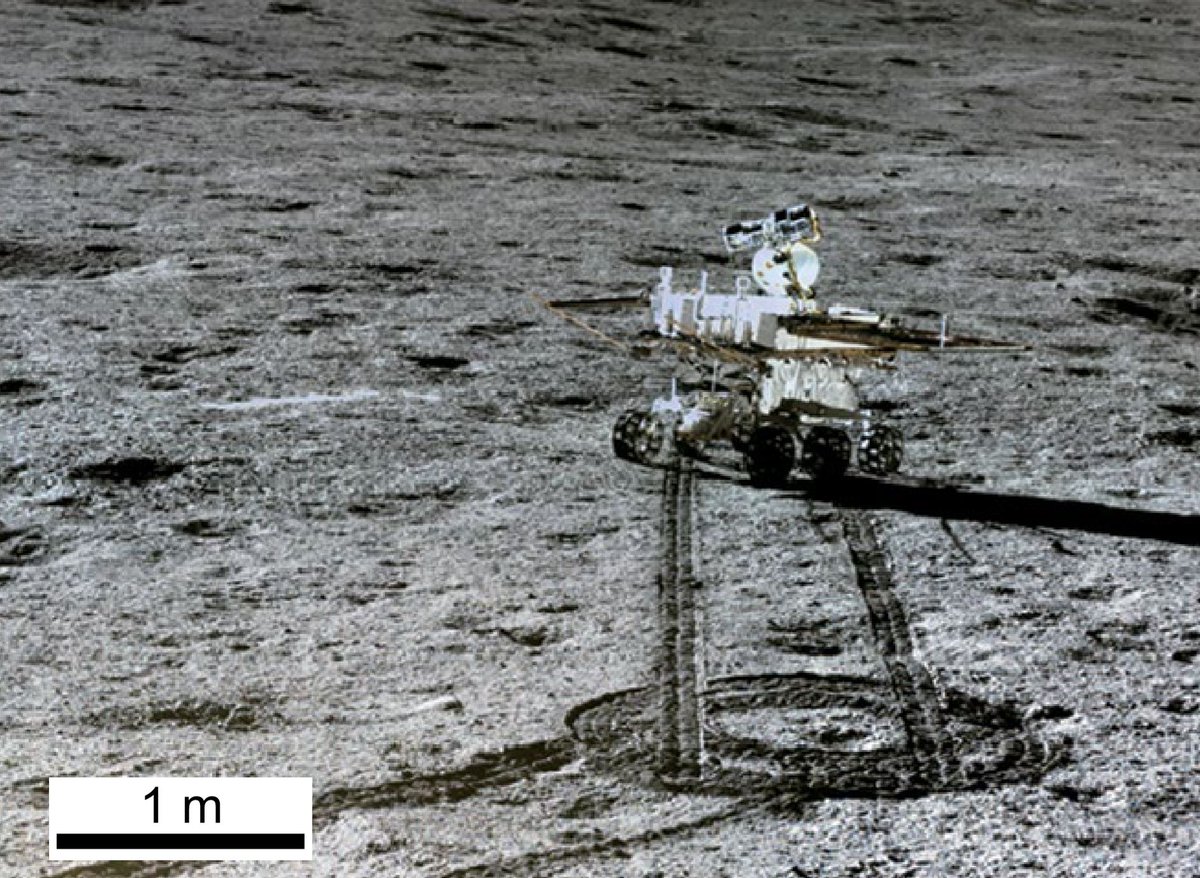
صور جديدة من الجزء الخلفي من القمرمسار القمر من عجلات روفر Yutu-2 والظل من الهوائي ومنصة مع كاميرا بانورامية:

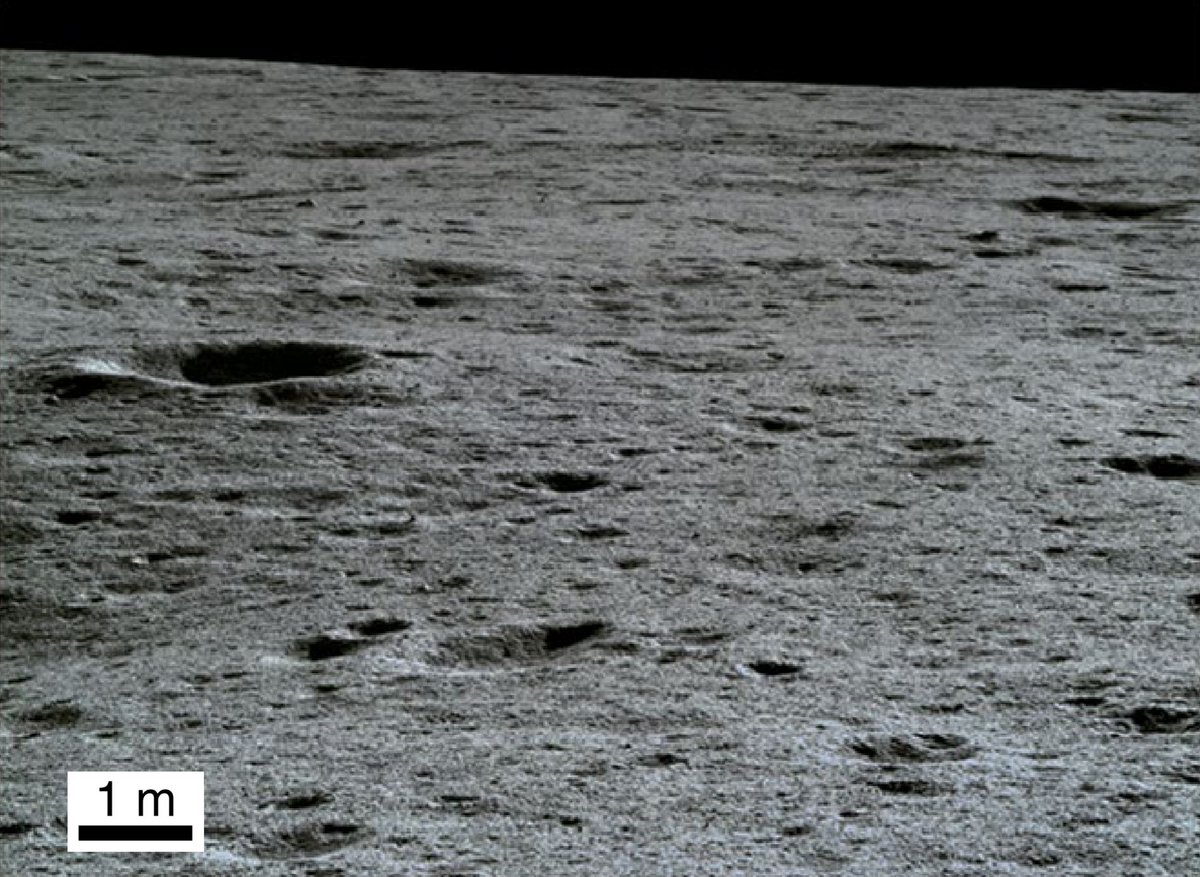
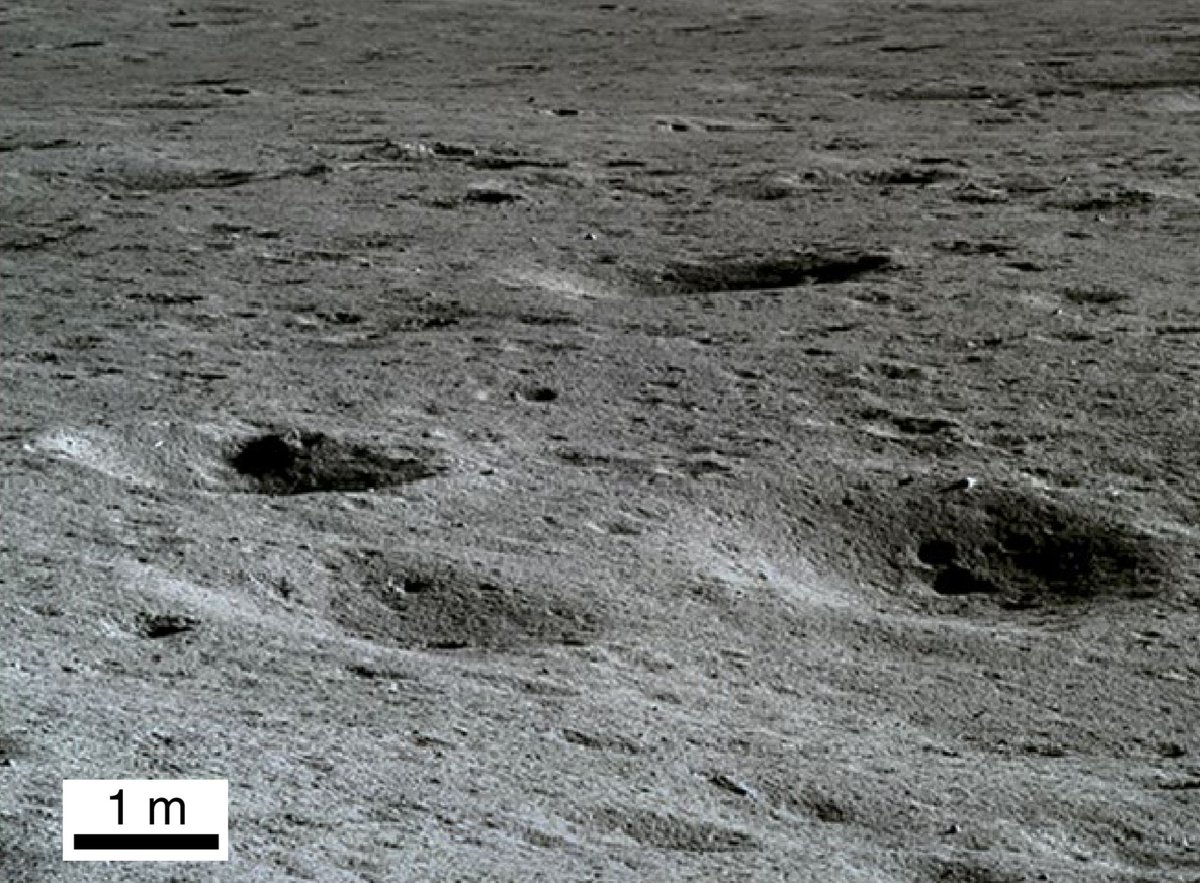
العديد من الحفر (ذات الظلال الجميلة) والجبال في الخلفية:

وهذه صور من المقال العلمي "القمر القمري الذي سيتم استكشافه بواسطة Chang'e-4" في عدد أبريل من مجلة Nature Geoscience.

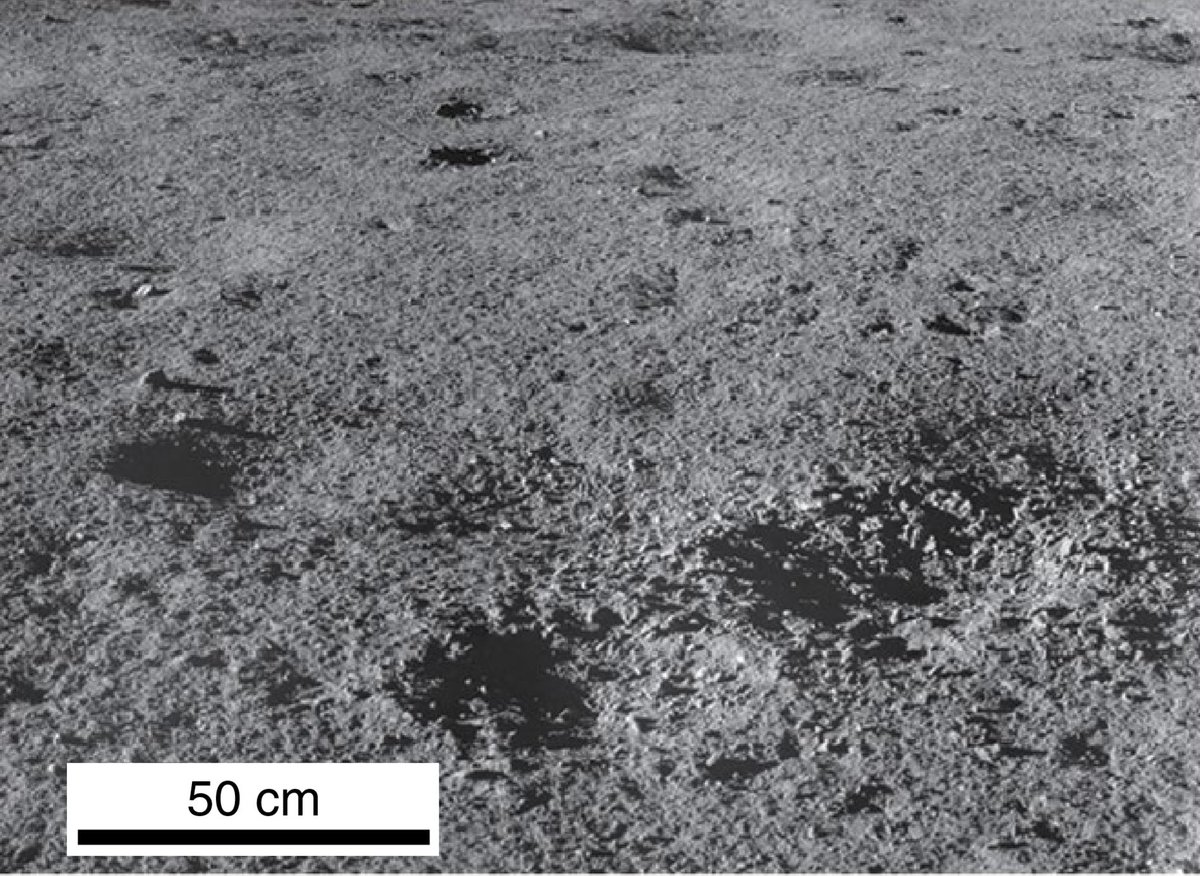
الحفر الصغيرة بالقرب من موقع الهبوط:
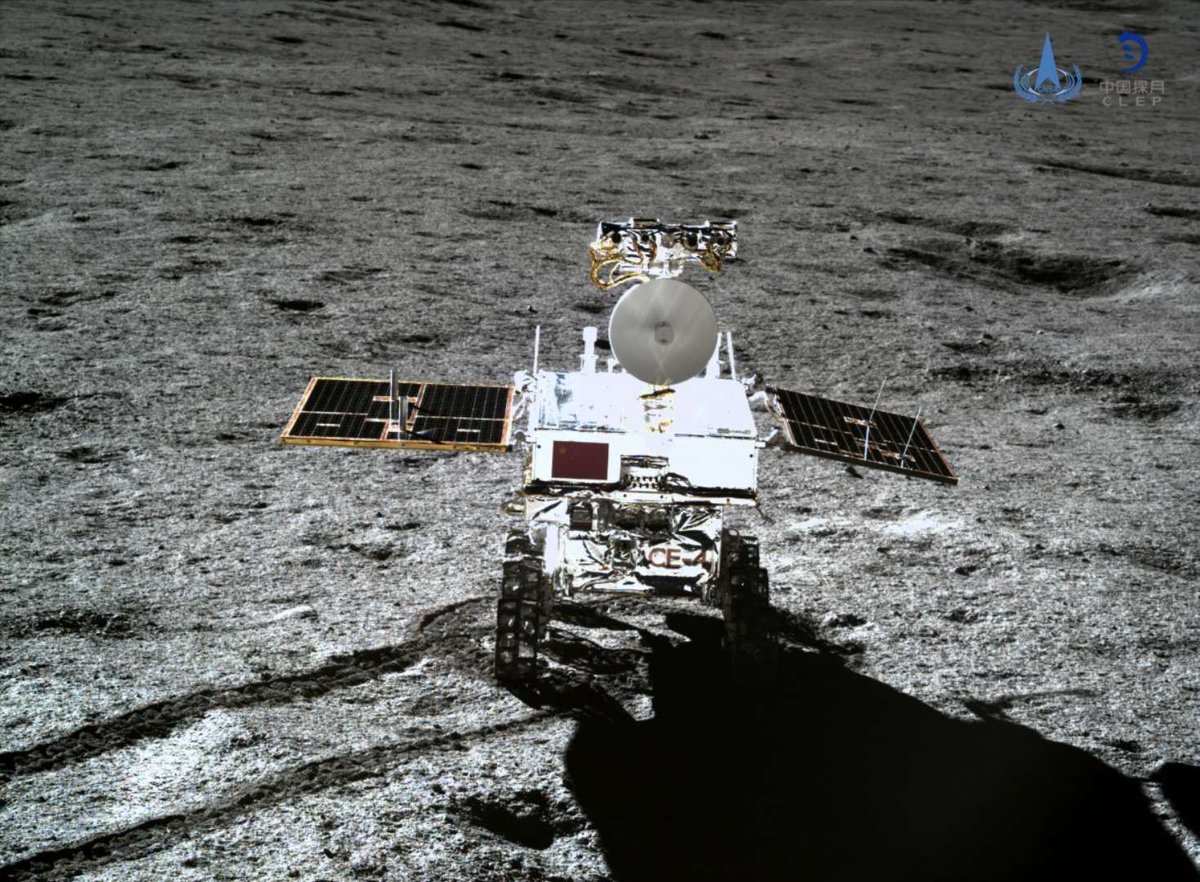
يستكشف Rover "Yutu-2" سطح القمر:
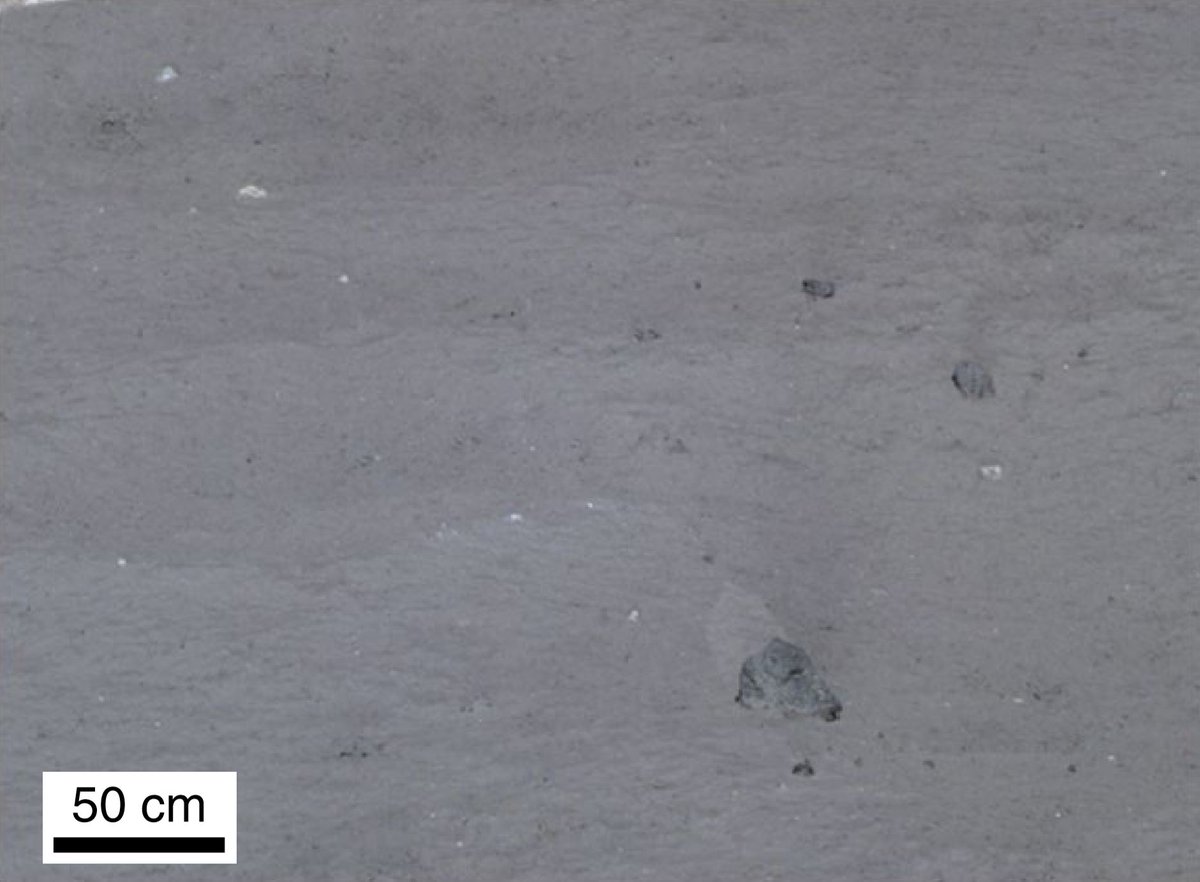
شظايا من الأحجار في الحفر الصغيرة (صورة من روبوت Yutu-2):
الحجارة الصغيرة على طول روفر Yutu-2:

حجارة داكنة غير عادية للغاية بالقرب من موقع الهبوط:
 ما الكاميرات المثبتة على وحدة Chang'e-4 و Yutu-2 روفر؟يتم تثبيت كاميرتين على وحدة الهبوط Chang'e-4:
ما الكاميرات المثبتة على وحدة Chang'e-4 و Yutu-2 روفر؟يتم تثبيت كاميرتين على وحدة الهبوط Chang'e-4:
- كاميرا الهبوط (كاميرا الهبوط - LCAM) ؛
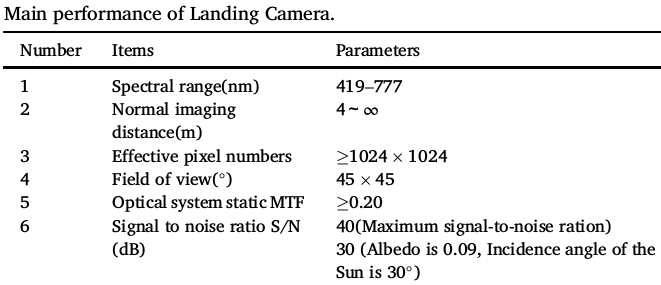
- كاميرا المناظر الطبيعية (كاميرا التضاريس - TCAM).تم تثبيت كاميرا الهبوط LCAM (0.5 كجم ، مقاس 116 × 100 × 70.4 مم) في الجزء السفلي من وحدة Chang'e-4 ، وتم تشغيلها تلقائيًا على ارتفاع 12 كم فوق سطح القمر لتسجيل إجراء الهبوط بدقة 1024 × 1024 بكسل ، 10 إطارات في الثانية.
فيديو لإجراء الهبوط من كاميرا LCAM - يتم تجميع عدة آلاف من الإطارات في فيديو واحد
LCAM غرفة الهبوط الميزات:
مخطط الدائرة لعناصر غرفة الهبوط LCAM:
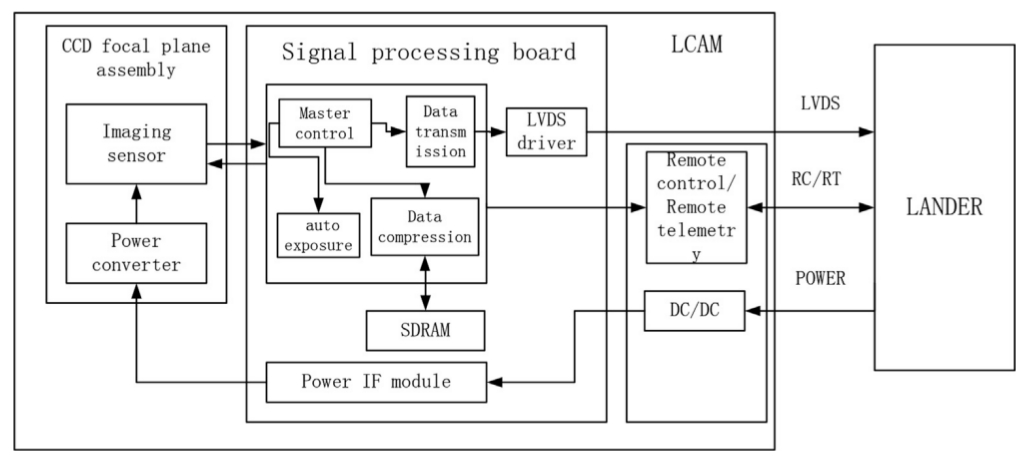
يتم نقل البيانات باستخدام واجهة LVDS (إشارة التفاضلية المنخفضة الجهد).
بعد الهبوط على القمر ، تلتقط كاميرا LCAM نفس الإطار فقط مع دعم الهبوط:

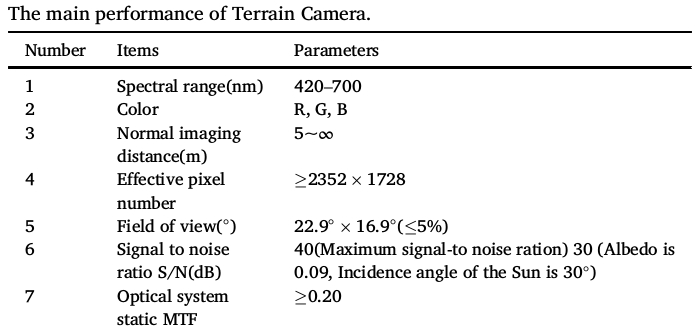
يتم تثبيت كاميرا TCAM ذات المناظر الطبيعية (0.64 كجم ، مقاس 92x105x118.9 مم) في أعلى نقطة من وحدة الهبوط Chang'e-4 على شريحة خاصة تسمح للكاميرا بتدوير 360 درجة حول محورها ويمكنها إمالة الكاميرا لأعلى أو لأسفل بزاوية تصل إلى 120 درجة. تعد صور TCAM بمثابة صور بانورامية للسطح وعناصر وحدة الهبوط ، وتتبع المسبار واستكشاف المنطقة المحيطة بمنطقة الهبوط.
ميزات الكاميرا TCAM المناظر الطبيعية:
مخطط الاتصال لعناصر الكاميرا المناظر الطبيعية TCAM:
بانوراما موقع الهبوط:

كاميرات LCAM و TCAM على وحدة الهبوط:

تعمل وحدة الهبوط Chang'e-4 في وضع ثابت ، وتعد صور سطح الأرض في منطقة الهبوط في المقام الأول مهمة جدًا لفهم أنواع الأسطح الموجودة حول الوحدة. بعد كل شيء ، هناك عدد كبير من الحفر والحجارة الصغيرة ، ويمكن أن تتداخل (في أسوأ الحالات) مع الإجراء لخفض روفر. نظرًا لأنه بعد الهبوط ، لا يمكن لوحدة Chang'e-4 تغيير موقعها وجعل "قفزة" إلى منطقة أخرى أكثر ملاءمة للهبوط.
يحتوي روفر Yutu-2 على كاميرا بانورامية ثنائية (كاميرا بانورامية - PCAM).يتم تثبيت كاميرا PCAM البانورامية (0.69 كجم ، مقاس 90x110x120 مم) في أعلى نقطة من روفر Yutu-2 على شريحة خاصة عريضة ، تسمح للكاميرا بتدوير 360 درجة حول محورها لالتقاط الصور لمناظر بانورامية للسطح.
نظرًا لأن الكاميرا تتكون من وحدتين متطابقتين ، يتم استخدامهما لإنشاء صورة ثلاثية الأبعاد باستخدام طريقة التصوير المجهر. للحصول على صورة ملونة في كاميرا PCAM ، يتم استخدام مرشح Bayer (صفائف مرشحات الألوان).
ميزات الكاميرا PCAM بانورامية:
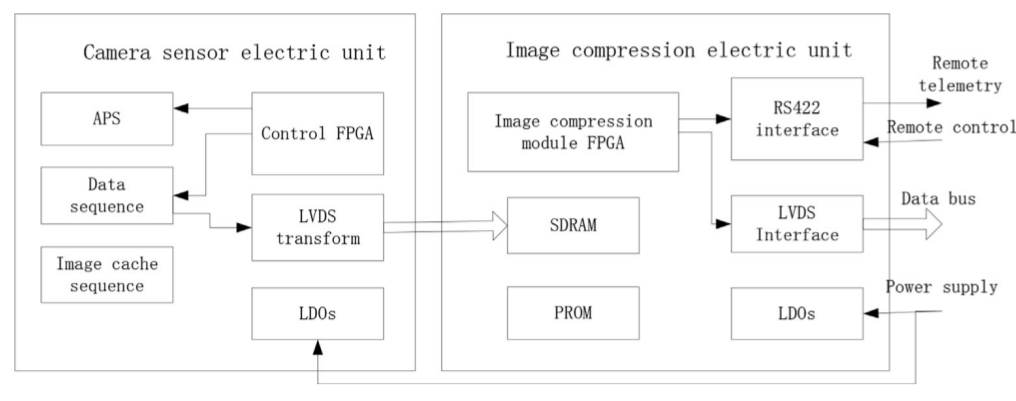
مخطط الاتصال لعناصر كاميرا PCAM البانورامية:

منظر عام لبانوراما السطح من روفر Yutu-2:

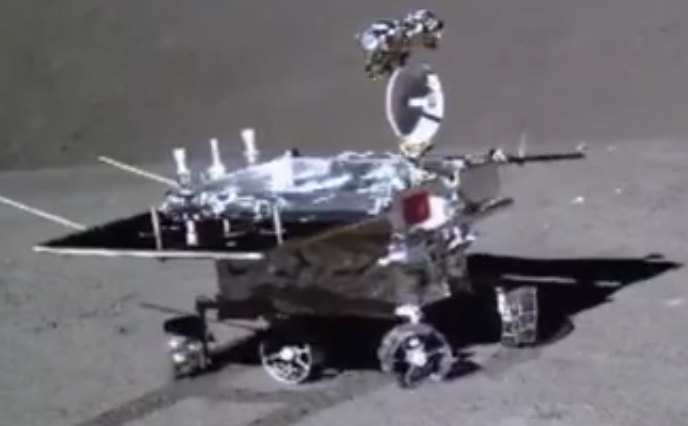
كاميرا PCAM على روفر:

في 3 كانون الثاني (يناير) 2019 ، بعد الانتهاء من جميع مراحل إجراءات الهبوط الناجحة وتركيب قنوات اتصال مستقلة مع أجهزة Chang'e-4 (وحدة الهبوط وروفر) ، بدأ عصر صورة لدراسة الجانب البعيد من القمر.
صور من الكاميرات:كاميرا بانورامية PCAM (روفر): إن Yutu-2 rover هي شريك فضاء متنقل وعالي الإنتاجية في وحدة الهبوط Chang'e-4.
قاد روفر Yutu-2 أكثر من 160 مترًا على طول السطح المركب في الجانب البعيد من القمر.
مسار روفر Yutu-2 في ثلاثة أيام قمرية:


من المثير للاهتمام كيف تعمل العجلات الأمامية على روفر Yutu-2 عند الدوران في المكان:

فيديو لإطلاق روفر "Yutu-2"
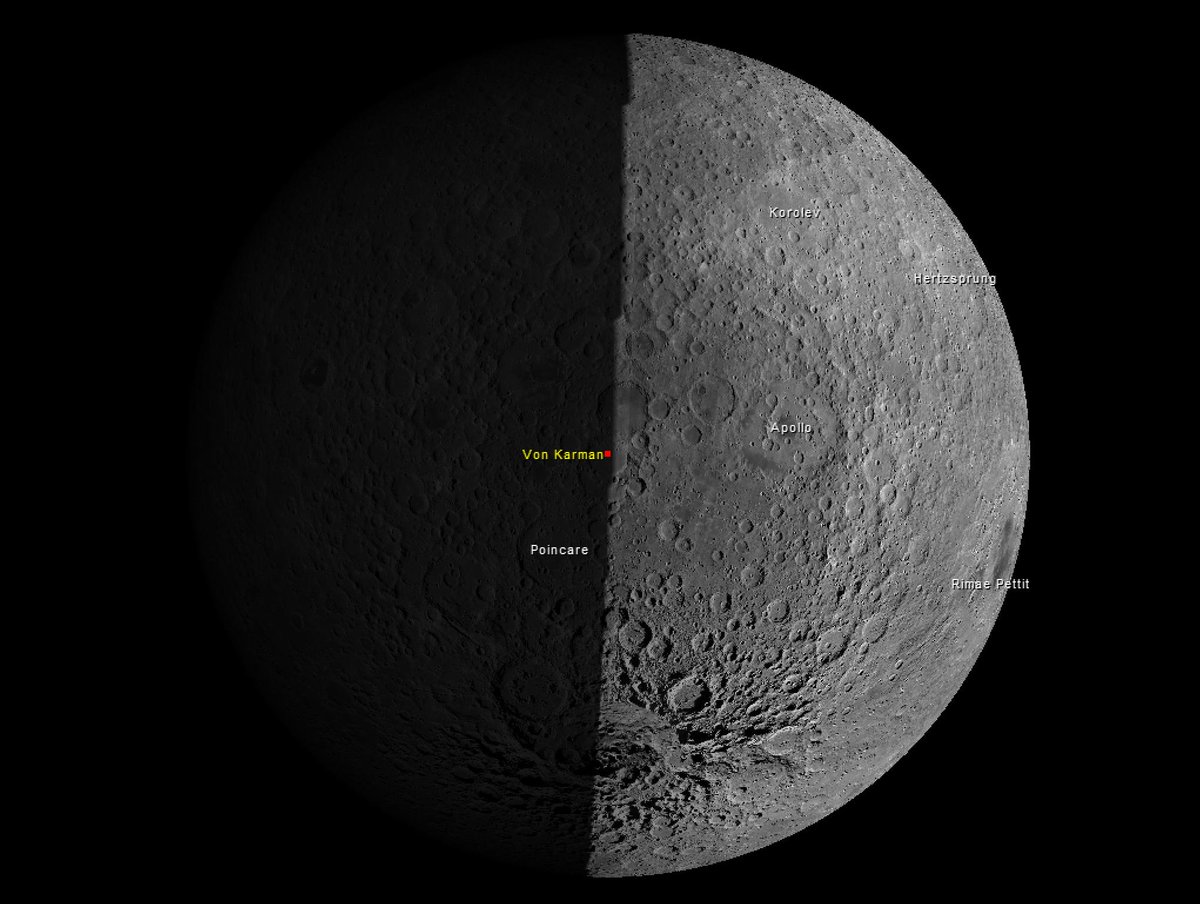
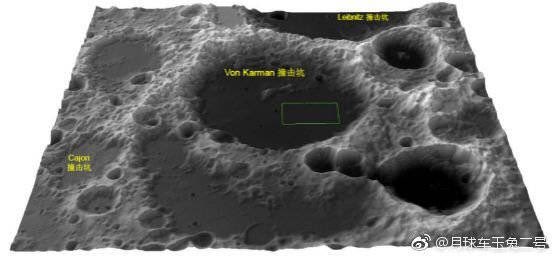
موقع الهبوط لمهمة Chang'e-4: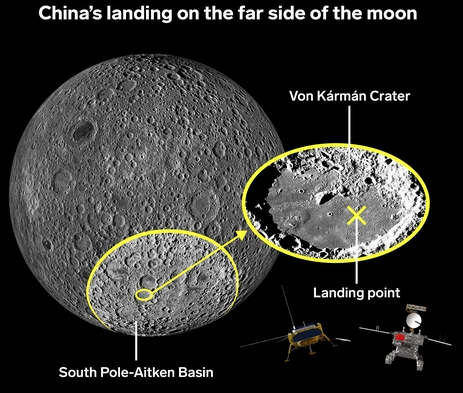
نظرًا لأن الجانب العكسي للقمر لديه أيضًا راحة أكثر تعقيدًا من الجانب المرئي من الأرض ، في عملية التحرك على طول السطح ، واجهت سيارة Yutu-2 روفر مشاكل وتداخل أكثر خطورة في المحركات ، مقارنةً بتلك التي واجهها سابقًا ، المسبار روفر Yutu "، أرسل إلى سطح القمر في ديسمبر 2013.
لسوء الحظ ، فإن أول مركبة من طراز Yutu من مهمة Chang'e-3 ، في 25 يناير 2014 ، كانت غير قابلة للتشكيل تقنيًا (فشل العناصر نتيجة تصادم) بعد التغلب على 114.8 مترًا على سطح قمري معقد.
سطح القمر في منطقة الهبوط في وحدة الهبوط Chang'e-4 مليء بالثنيات والعديد من الحصى والحفر الصغيرة ، وبعد إجراء كل من حركاته الصغيرة ، يجب أن تتوقف Yutu-2 rover ، وتصوير السطح حولها وترسل هذه البيانات إلى الأرض عبر القمر الصناعي مكرر.
ثم يقوم العلماء والمشغلون في مركز عملائي (MCC) والمهندسون على الأرض بمعالجة هذه البيانات ورسم مسار آخر تتبعه طائرة Yutu-2.
يجب تكوين هوائيات Yutu-2 rover بحيث تشير إلى ساتل مكرر لإرسال واستقبال إشارات التحكم بشكل صحيح ، في حين يجب إمالة الألواح الشمسية في روفر بشكل أمثل لتلقي كمية كبيرة من ضوء الشمس لتعظيم الإخراج الكهرباء في وقت نقل البيانات.
 روفر ذات ست عجلات "Yutu-2":
روفر ذات ست عجلات "Yutu-2":- يبلغ وزن الروفر الكلي حوالي 140 كجم (310 رطل) ؛
- الحمولة حوالي 20 كجم (44 رطلا) ؛
- يمكن أن تتحرك على المنحدرات ويحتوي على أجهزة استشعار التلقائي لمنع الاصطدام مع كائنات أخرى ؛
- يتم تزويد روفر بالكهرباء عن طريق اثنين من الألواح الشمسية ، مما يسمح للعمل روفر خلال يوم قمري ؛
- الحد الأقصى للسرعة 200 متر في الساعة (لا يمكن الوصول إلى هذه السرعة على سطح القمر - حيث أن العناصر الموجودة على السطح لن تسمح بتسريع وتدمير المسبار في وقت مبكر) ؛
- الحد الأقصى لمنطقة البحث 3 متر مربع. كم.
- وقت العمل المقدر - 3 أشهر (2160 ساعة) ؛
- أقصى مسافة المقدرة - 10 كم.
إن عناصر العجلات في Yutu-2 rover هي بالفعل ميزة تصميمها المعقدة ، والتي ، في مرحلة التصميم ، كان لا بد من تطويرها بواسطة مهندسي الأكاديمية الصينية لتكنولوجيا الفضاء. رفضوا استخدام المسارات لأنها تبين أنها أقل قابلية للصيانة وضعيفة في الاختبارات.
على سبيل المثال ، إذا حصلت حجارة صغيرة داخل آلية المسار ، فقد تتعطل عربة النقل وتفقد مسارها. على النقيض من التنفيذ ذي العجلات ، وهو أكثر موثوقية ولديه مورد متزايد ، فإنه يمكن أيضًا نقل الحجارة بأمان يصل ارتفاعها إلى 20 سم.

ومع ذلك ، إذا انقلبت روفر Yutu-2 ، فلن تتمكن من العودة إلى موقع عملها مرة أخرى. الألواح الشمسية على جانبي سطح القمر هي هشة للغاية ، ويمكن أن تتصدع أو تصبح متربة بعد السقوط ، مما يجعلها غير صالحة للاستعمال.

وبالتالي ، في عملية التحكم عن بعد في الروفر ، من الضروري التركيز على الحفاظ على موقع روفر Yutu-2 في حالة مستقرة وعدم تركه يسقط عند التحرك على طول السطح.
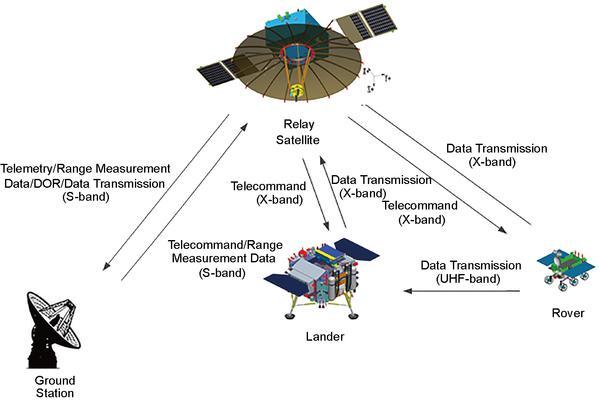
ولكن كيف يمكن التحكم في جميع هذه الكاميرات على وحدة الهبوط Chang'e-4 و Rover Yutu-2 ونقل البيانات واستقبال الطاقة؟حول وحدات التحكم على متن الطائرة ونظام الإمداد بالطاقة لوحدة الهبوط والطائرة.تحتوي وحدة الهبوط Chang'e-4 و rover Yutu-2 على لوحات التحكم الخاصة بحمولة البيانات ، والتي تستخدم لتلقي وتخزين والتحكم في البيانات العلمية القادمة من وحدات وعناصر مختلفة من الأجهزة.
علاوة على ذلك ، يتم نقل بيانات إشارات التحكم والبيانات العلمية والصور باستخدام واجهات RS-422 (القياس عن بعد والتحكم) و LVDS (البيانات العلمية) إلى وحدات التحكم المركزية لوحدة الهبوط وروفر ، التي تنقلها عبر نظام الاتصال إلى مركز عملائي على الأرض باستخدام القمر الصناعي مكرر "Tseyuqiao".
تم تجهيز وحدات التحكم في الحمولة النافعة لوحدة الهبوط Chang'e-4 و Rover Yutu-2 بمعالج مركزي ومصفوفات FPGA.
أيضًا ، بمساعدة عناصر تحكم الحمولة النافعة ، يتم تحويل الجهد على متن الطائرة + 28 فولت إلى الجهد لإمدادات الطاقة الثانوية + 5 فولت ، + -15 فولت ، + 3.3 فولت ، بالإضافة إلى المراقبة المستمرة لقيم الجهد ودرجة حرارة وحدات التحكم والأجهزة الخارجية.
يستخدم المعالج التالي ما يلي: ATMEL AT697F (معالج Radar Hard 32 بت SPARC V8).
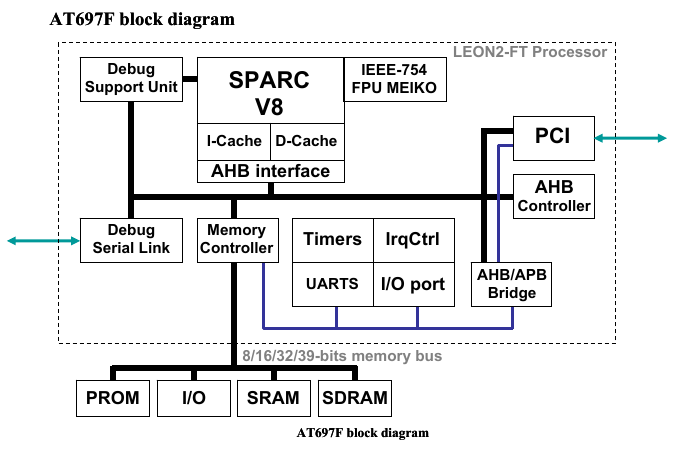
عند استخدام الدوائر المتكاملة المنطقية القابلة للبرمجة (FPGA): مجموعة من ستة XILINX XQR2V3000-4CCG717 (QPro Virtex-II FPGA) تصلب الإشعاع.
لمزيد من الحماية للدائرة الصغيرة ضد الإشعاع ، يتم استخدام شاشات ألمنيوم بسمك لا يقل عن 3.8 مم.
مخططات الاتصالات ونقل البيانات من المعدات على وحدة الهبوط Chang'e-4: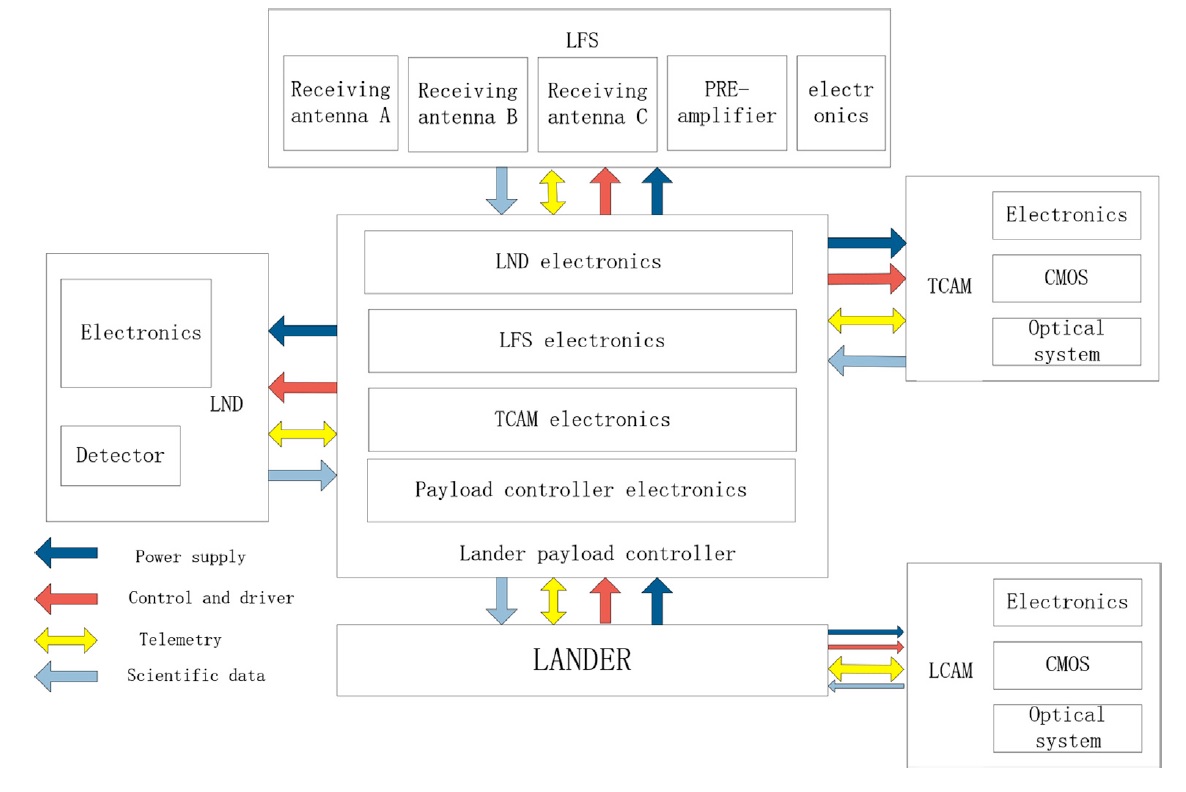
حيث:
- LFS - مطياف التردد المنخفض ؛
- LND - النيوترونات على سطح القمر وقياس الجرعات ؛
- TCAM - كاميرا التضاريس ؛
- LCAM - كاميرا الهبوط.
أنظمة الاتصالات ونقل البيانات من المعدات على Yutu-2 روفر: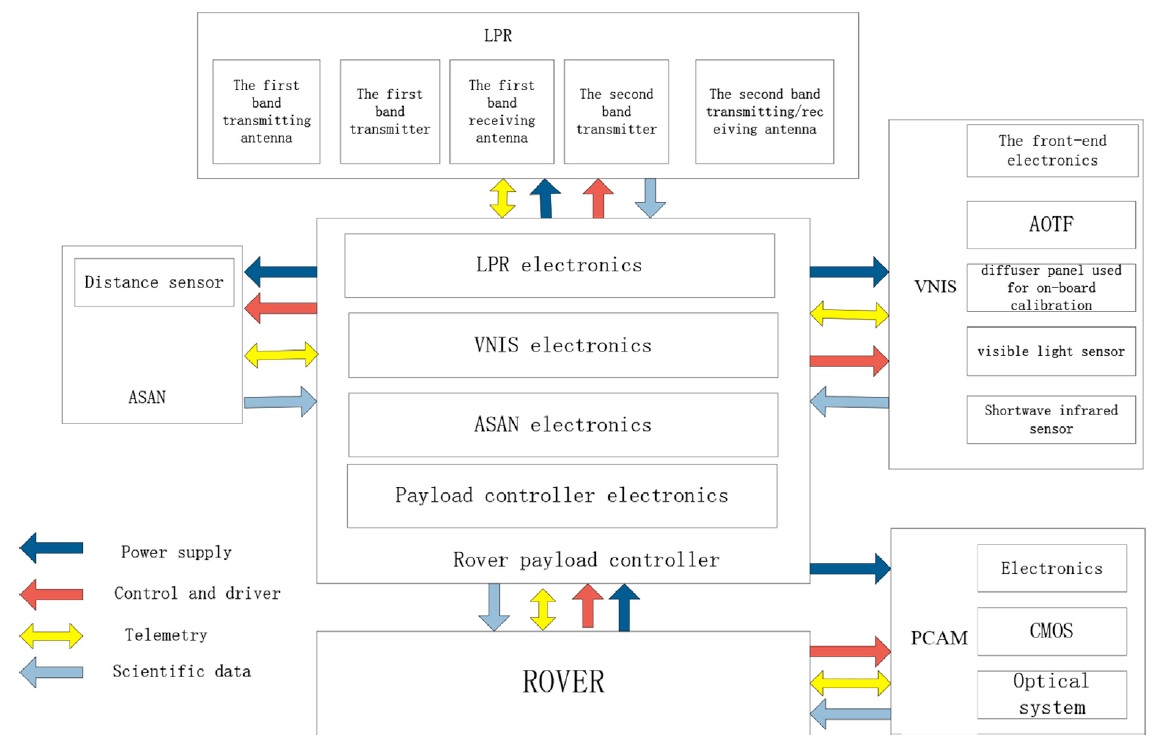
حيث:
- LPR - رادار اختراق القمر.
- ASAN - محلل صغير متقدم للمحايدة ؛
- VNIS - مطياف التصوير المرئي والأشعة تحت الحمراء ؛
- PCAM - كاميرا بانورامية.
بالمناسبة ، في وقت سابق من المنشورات تحدثت بالفعل عن جميع المعدات العلمية تقريبا من
وحدة الإطلاق والروفر ، ظل جهاز علمي واحد فقط متخفيًا - LPR (رادار اختراق القمر) - والذي يمكن رؤيته خارجيًا ، مثل اثنين من "الهوائيات" وراء المركبة.
سأحاول أن أكتب عن هذا الجهاز المثير للاهتمام منشور منفصل.