
في عالم الروبوتات ، ظل إطار عمل برمجيًا يتطور لفترة طويلة وبنجاح يتيح لك إمكانية وضع نماذج أولية للأنظمة الآلية بسرعة - نظام تشغيل الروبوت (ROS). نحن في مختبر سبيربنك للروبوتات نستخدمه بنشاط في تطوير مشاريعنا الخاصة. بعد اكتسابنا بعض الخبرة والإشارة إلى أنه لم يتم عقد اجتماع عملي واحد حول ROS في روسيا ، فقد قررنا تنظيمه وتبادل معارفنا ، وفي الوقت نفسه التعرف على مجتمع الروبوتات. ستعقد ROS Russian Meetup 2019 كجزء من منتدى Skolkovo Robotics 2019 في Skolkovo في 16 أبريل ، وهذه فرصة لمطوري ROS والروبوتات من جميع المستويات لتكريس يوم واحد لتبادل مباشر للتجارب والتواصل مع المجتمع. إذا كنت على دراية بـ ROS ، فيمكنك الانتقال بأمان إلى
نموذج التسجيل ، كما يتم وضع البرنامج والمعلومات التنظيمية هناك. في الاجتماع ، سنناقش تاريخ ROS ومبادئ المجتمع ، وسنخصص الكثير من الوقت للتقارير العملية حول SLAM والملاحة الداخلية بالليزر بالليزر ، ومخطط مسار الروبوت. سنعرض كيفية التحكم في المتلاعبين الصناعيين عبر ROS ، وكيفية استخدام بيانات المستشعر ، وكيفية العمل مع جهاز الحالة SMACH. وسنخبرك أيضًا بكيفية تثبيت ROS بسهولة والبدء في تطوير برنامج روبوت.
بالمناسبة ، المشاركة في الاجتماع مجانية ، ولكن نظرًا لأن عدد المقاعد محدود ، فنحن نطلب منك انتظار التأكيد. ولأولئك الذين ليسوا على دراية بـ ROS ، نقدم نظرة عامة صغيرة.
 عرض ثنائي الأبعاد للعالم من خلال عيون ROS
عرض ثنائي الأبعاد للعالم من خلال عيون ROSنظام التشغيل Robot هو إطار عمل بروبوتات يقوم بتنفيذ الخوارزميات الأساسية لبناء روبوتات معقدة. يتضمن مجموعة من الأدوات والمكتبات والمعايير المصممة لتبسيط مهمة إنشاء سلوك روبوت معقد وموثوق به على مجموعة واسعة من المنصات الآلية.
الأيديولوجية الرئيسية للمشروع هي مبادئ المصدر المفتوح ، وتوثيق الحزم ، وإعادة استخدام الكود ، والمجتمع العالمي للروبوتات.
لماذا تم إنشاؤه
من الصعب إنشاء برامج روبوتية عالمية موثوقة حقًا. من وجهة نظر الروبوت ، تؤدي المشاكل التي تبدو تافهة للشخص إلى التعقيد العالي للمطور الذي يقوم ببرمجة النظام الآلي. من الصعب للغاية التعامل مع هذه المهام بحيث يتعذر حلها في بعض الأحيان بمفردها أو في فريق صغير.
نتيجة لذلك ، تم إنشاء ROS من الألف إلى الياء لتحفيز تطوير البرمجيات التعاونية للروبوتات. على سبيل المثال ، قد يحتوي أحد المختبرات على خبراء SLAM داخليين وقد يقدم نظام SLAM من الطراز العالمي. يمكن أن يكون لدى مجموعة أخرى خبراء في استخدام SLAM للملاحة ، ويمكن أن تقوم مجموعة أخرى بتطوير نهج رؤية الكمبيوتر الذي يعمل بشكل جيد للتعرف على الكائنات الصغيرة في بيئة فوضوي. تم تصميم ROS خصيصًا لمثل هذه المجموعات للتعاون والبناء على عمل بعضهم البعض.
خلفية قصيرة
ROS هو مشروع كبير له تاريخ وعدد كبير من المشاركين. كان هناك حاجة إلى نظام تعاون مفتوح من قبل العديد من الأشخاص في مجتمع أبحاث الروبوتات ، وتم إنشاء العديد من المشاريع لهذا الغرض.
في منتصف العقد الأول من القرن العشرين ، بذلت جامعة ستانفورد جهودًا متعددة تتعلق باستخدام الذكاء الاصطناعي في الروبوتات ، على سبيل المثال ، برنامج ستانفورد AI Robot (STAIR) وبرنامج Personal Robots (PR) لإنشاء نماذج أولية مخصصة لأنظمة البرامج الديناميكية المصممة للاستخدام في الروبوتات. . في عام 2007 ، قدم Willow Garage موارد كبيرة لزيادة توسيع هذه المفاهيم وإنشاء نماذج أولية. تم دعم هذه الجهود من قبل عدد لا يحصى من الباحثين الذين شاركوا وقتهم وخبراتهم للمساهمة في الأفكار الأساسية لـ ROS ، وفي حزم البرامج الرئيسية. تم تطوير جميع البرامج باستخدام رخصة مفتوحة المصدر BSD وأصبحت تدريجيا منصة تستخدم على نطاق واسع في مجتمع الباحثين الروبوتات.
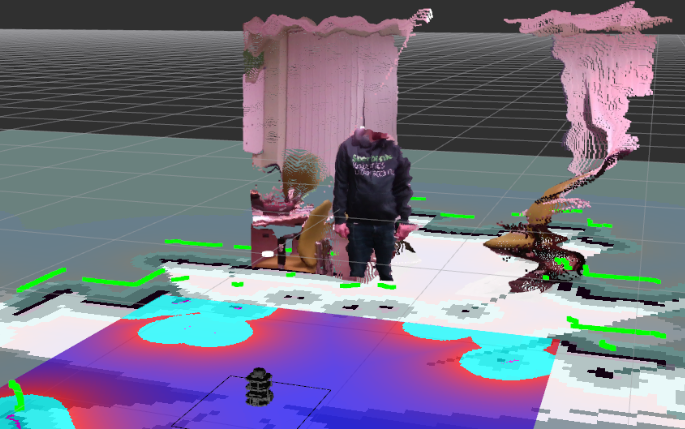 رؤية العالم ثلاثية الأبعاد من خلال عيون ROS
رؤية العالم ثلاثية الأبعاد من خلال عيون ROS
مجتمع ROS العالمي
منذ البداية ، تم تطوير ROS في العديد من المؤسسات والعديد من الروبوتات ، بما في ذلك العديد من المؤسسات التي تلقت الروبوتات PR2 من Willow Garage. على الرغم من أنه سيكون من الأسهل بكثير على جميع المشاركين استضافة التعليمات البرمجية الخاصة بهم على نفس الخوادم ، إلا أن النموذج "الموحد" أصبح بمرور الوقت إحدى نقاط القوة في نظام ROS البيئي. يمكن لأي مجموعة تشغيل مستودع رمز ROS الخاص بهم على الخوادم الخاصة بهم ، وهم يمتلكونه بالكامل ويتحكمون فيه. لا يحتاجون إلى إذن من أي شخص. إذا قرروا جعل مستودعهم متاحًا للعامة ، فيمكنهم اكتساب الاعتراف بالمجتمع الذي يستحقونه لإنجازاتهم والاستفادة من المختبرين والاقتراحات للتحسين ، مثل جميع مشاريع المصادر المفتوحة.
خلال السنوات القليلة الماضية ، نمت ROS وتضم الآن مجموعة كبيرة من المستخدمين حول العالم. تاريخياً ، كان معظم المستخدمين في مختبرات الأبحاث ، لكنهم يظهرون بشكل متزايد في القطاع التجاري ، وخاصة في مجال الروبوتات الصناعية والخدماتية.
مجتمع ROS نشط للغاية وله أكثر من 3000 عضو في قائمة discourse.ros.org ، وأكثر من 8000 مستخدم في ويكي الوثائق المشتركة وحوالي 22500 مستخدم على الموقع للحصول على إجابات لأسئلة ROS. تحتوي ويكيبيديا على أكثر من 22000 صفحة ، وتيرة التعديلات حوالي 30 في اليوم.
في الوقت الحالي ، أصبح عدد مستخدمي ROS الناطقين باللغة الروسية في المرتبة 15 بين البلدان الأخرى وفقًا لتقرير ROS Metrics Report 2018. لنقابله ونناقشه ونصلحه. يمكنك أيضًا التعرف على قدرات ROS لمشاريعك ، حول الممارسة الحقيقية لتطوير الروبوتات.
للمشاركة كمستمع ، املأ
النموذج .
وإذا كانت لديك رسالة مثيرة للاهتمام للمجتمع ،
فلا يزال
بإمكانك أن تصبح متحدثًا .
البرنامج: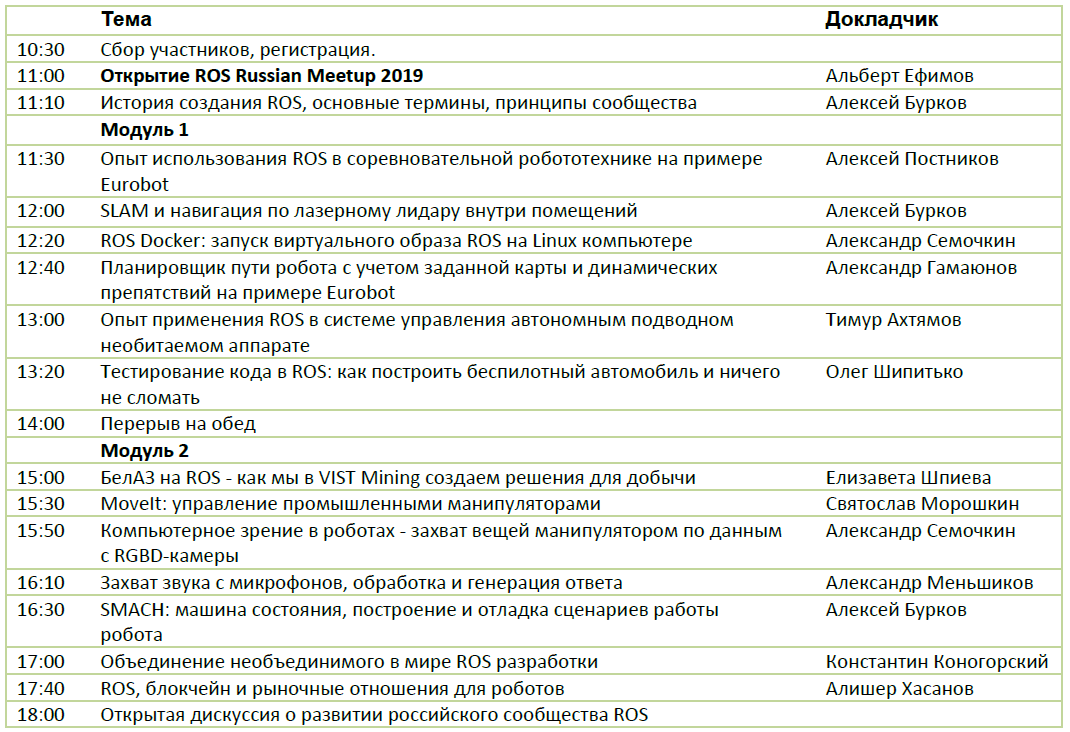
يتم تنظيم هذا الحدث من قبل مختبر سبيربنك للروبوتات.