القرد (الشمبانزي) يأخذ النمل الأبيض من النمل الأبيض باستخدام عصا. في الصورة الثانية ، تستخدم الغوريلا عصا لجمع العشب الذي تحتاجه.ابتكر
القرد (الشمبانزي) يأخذ النمل الأبيض من النمل الأبيض باستخدام عصا. في الصورة الثانية ، تستخدم الغوريلا عصا لجمع العشب الذي تحتاجه.ابتكر مطورو الولايات المتحدة
خوارزمية متخصصة للروبوتات ، مما مكّن الأخير من استخدام أدوات إضافية لإكمال المهمة. وهو بسيط نسبيًا - بطريقة معينة لنقل كائن من النقطة أ إلى النقطة ب.
تتكون الخوارزمية من جزأين. الأول يسمح للروبوت بتحريك الأشياء بشكل عشوائي ، مع إجراء نوع من التجارب. الجزء الثاني يجعل من الممكن تقييم عواقب إجراء معين باستخدام شبكة عصبية. كما اتضح فيما بعد ، فإن الروبوتات ، التي تعمل وفقًا للخوارزمية ، تستخدم الأدوات المساعدة بفعالية دون تدريب.



يستخدم الشخص العديد من الأدوات الإضافية كل يوم. كما أن الحيوانات قادرة على ذلك - يمكن للببغاوات والغربان والقرود وبعض الكائنات الحية الأخرى استخدام العصي والحصى والأشواك لتحقيق المهام المرجوة منها (على سبيل المثال ، استخراج يرقة الخنفساء من أسفل اللحاء).
بالنسبة لنا ، فإن استخدام سكين لتقطيع الخبز أمر واضح للغاية. ولكن بالنسبة للروبوت الذي يحتاج إلى شرح كل إجراء في شكل لغة الآلة - وليس على الإطلاق.
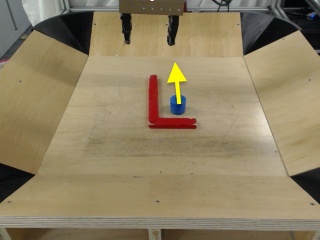
طور علماء من جامعة كاليفورنيا في بيركلي طريقة لتدريب الروبوتات على استخدام الأدوات المساعدة واتخاذ القرارات بشأن تطبيقها في موقف معين. تقوم الخوارزمية "بتصور" المهمة ، مع توضيح الروبوت الذي يجب أن يتم نقل المثال فيه. وبالفعل الروبوت (هذا هو مناور الروبوت العادي) يأخذ أداة وتحريك كائن. يتم تتبع جميع الحركات على الكاميرا.

تعتمد الخوارزمية على شبكة عصبية. يحسب برنامج متخصص تسلسلات مختلفة من الإجراءات للروبوت التي يتم تغذيتها في شبكة عصبية. يؤدي هذا إلى إنشاء مقطع فيديو يوضح ما سيحدث نتيجة لتنفيذ إجراء معين.
يعطى مناور أمر للقيام بعمل ما. إذا تزامنت النتيجة الحقيقية مع النتيجة المخطط لها ، يتم حساب المهمة. في أثناء العمل ، تتم مقارنة خيارات الفيديو المختلفة بالصورة التي يوفرها المستخدم وتعرض النتيجة النهائية للمهمة. بعد العثور على تسلسل الإجراءات الأمثل ، يتابع الروبوت حل المشكلة.


يجمع هذا المشروع بين أساليب التعلم الآلي مثل التعليم
غير التدريبي والتدريب على المحاكاة . في الحالة الأولى ، يحدد الروبوت الخيارات بشكل عشوائي. نتيجة لذلك ، يتم إنشاء عينة كبيرة من البيانات ، مما يساعد على تحقيق نتيجة مثالية. في الحالة الثانية ، أظهر المطورون بوضوح للروبوت كيفية استخدام الأداة في حالة واحدة أو أخرى. في هذه الحالة ، يتم تسجيل الحل المرجعي على الكاميرا التي يقارن بها الروبوت عواقب تصرفاته.
في بعض الحالات ، "يفهم" الروبوت أنه من الأفضل إتمام المهمة بدون عناصر مساعدة - ويفعلها. يتم استخدام الأدوات دون تدريب ، حتى لو لم يتم عرض الروبوت من قبل.