MicroPython هو تطبيق لغة برمجة Python لأجهزة التحكم الدقيقة التي تمكن جمهور هذه اللغة باستخدام قواعد بناء الجملة المألوفة ومبادئ البرمجة للعمل مع أجهزة الحوسبة الصغيرة.
في عملي ، استخدم MicroPython لنموذج أولي ، واختبار الأفكار بسرعة وإنشاء مواقف صغيرة. بفضل برنامج REPL وصياغته البسيطة ، يعد MicroPython مثالياً لمشاريع DIY وللتدريس في البرمجة.
عندما يتعلق الأمر بتفاعل أجهزة الكمبيوتر مع العالم الحقيقي ، فإنني مهتم دائمًا بسرعة تفاعلها. في بعض الحالات ، استخدام تكنولوجيا المعالجات الدقيقة ، على سبيل المثال في مجال إنترنت الأشياء ، سرعة رد فعل الجهاز ليست مهمة للغاية. لا يوجد فرق كبير عند تشغيل صفارة الإنذار: 10 ميكروثانية بعد اكتشاف الحركة أو 10 مللي ثانية.
لكن في بعض الجوانب ، تكون السرعة وفترة رد الفعل مهمة ويثور سؤال حول ما إذا كان يجب استخدام MicroPython. لقد أجريت القليل من البحث ، وهو مستوحى من
الفيديو من خطاب خالق MicroPython Damien George. تساءلت عن مدى سرعة استجابة البرنامج المكتوب في Micropython لتأثير المدخلات.
سيكون الجهاز التجريبي هو متحكم ESP8266 ، على لوحة NodeMcu مع إصدار MicroPython esp8266-2018511-v1.9.4.
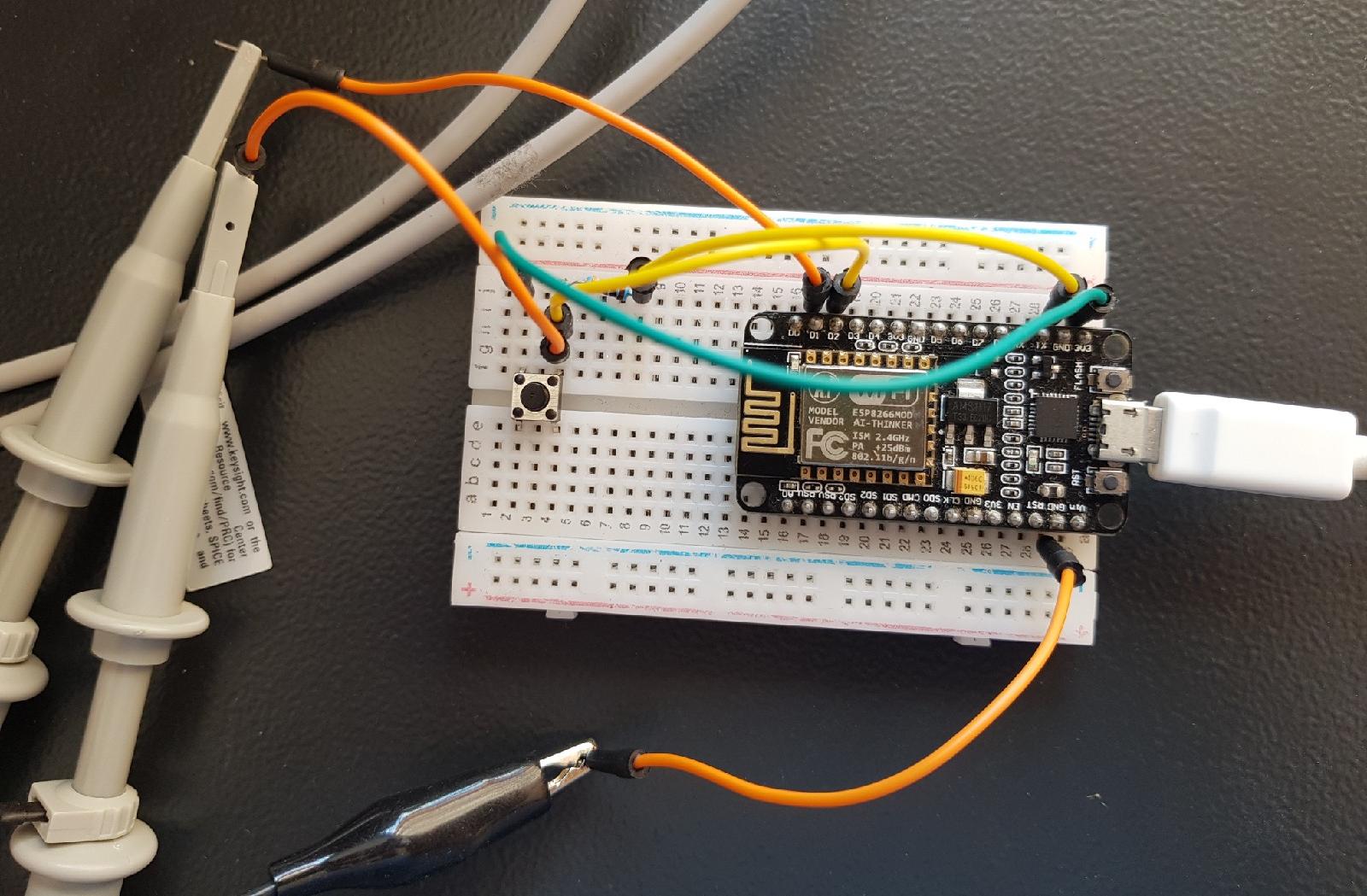
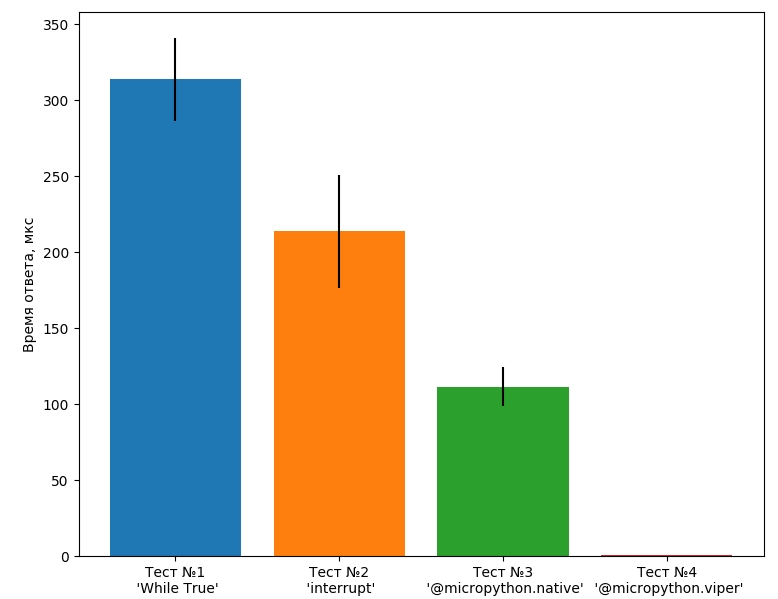
سوف أضغط على الزر وأن أسجل على مرسمة الذبذبة فارق التوقيت بين الضغط وظهور 3.3 فولت على الساق الأخرى للمعالج الدقيق. يتم كل قياس 15 مرة ، يتم أخذ المتوسط (كما هو موضح في الرسوم البيانية) ويتم حساب الانحراف المعياري (شريط أسود في الرسوم البيانية).
اختبار رقم 1.
إذا قمت بحل هذه المشكلة "بشكل مباشر" ، فسيبدو البرنامج بسيطًا:
import machine import time o = machine.Pin(5, machine.Pin.OUT)
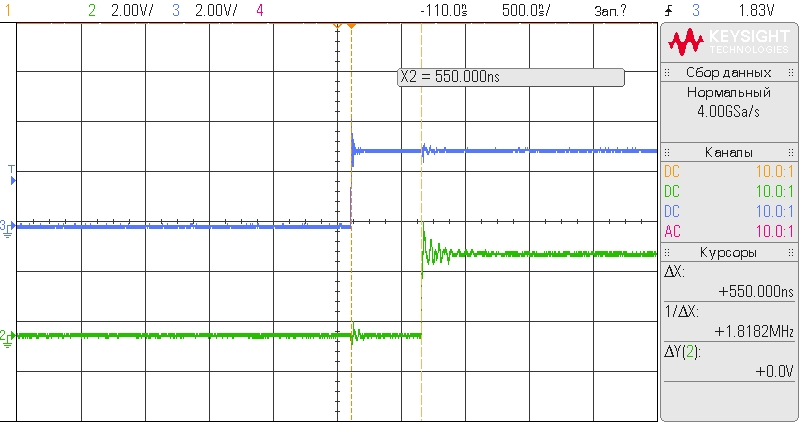
شكل الموجة النموذجي مع مثل هذا البرنامج يشبه هذا:
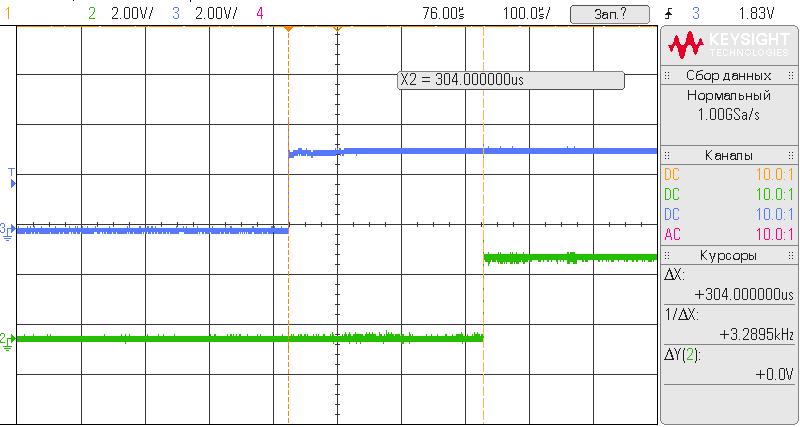
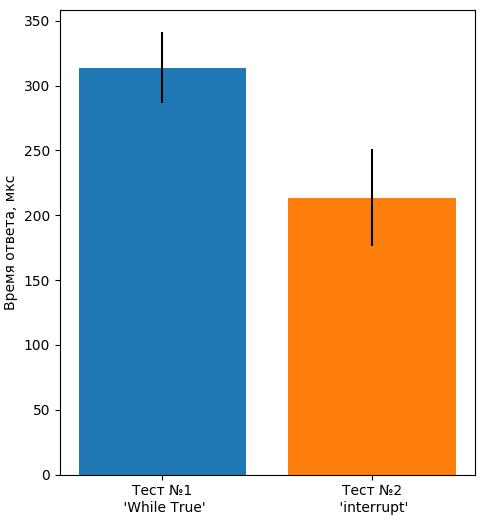
هنا وعلى أشكال الطول الموجي الأخرى ، الإشارة "الزرقاء" هي الدبوس بالزر ، دبوس الاستجابة "الأخضر". مع 15 التكرار ، يتم الحصول على الصورة التالية:

في المتوسط ، يبلغ وقت رد الفعل حوالي 310 ميكروثانية ، والحد الأقصى هو 356 ،s ، وليس بسرعة كبيرة ، ولكن بالنسبة لبعض التطبيقات يكون مقبولًا تمامًا.
اختبار رقم 2
يمكنك تسريع الكود القياسي "خارج الصندوق" من خلال التعامل مع المقاطعة.
import machine import time o = machine.Pin(5, machine.Pin.OUT)
والصورة هي كما يلي:
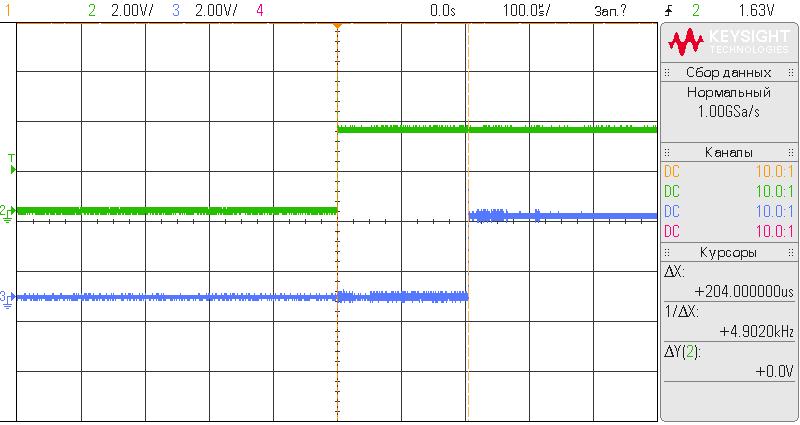
والحد الأقصى لوقت الاستجابة هو 306 μs.
يعطي استخدام المقاطعات زيادة في سرعة حوالي 20 ٪ ، ولكن في الوقت نفسه يعطي انتشار كبير نوعا ما في وقت الاستجابة.
اختبار رقم 3
إذا كانت السرعات التي تم الحصول عليها غير كافية ، فإن الخطوة التالية هي استخدام البناء micropython.native @ ، مما يجعل من الممكن تحويل رمز Python إلى رمز الجهاز الأصلي. ولكن هناك بعض
القيود .
خيار الكود:
import machine import time o = machine.Pin(5, machine.Pin.OUT)
نمط استجابة نموذجي على الموجي:

مقارنة بالطريقة السابقة ، يتم مضاعفة التسارع تقريبًا:

أطول وقت استجابة هو 128 μs.
اختبار رقم 4
تتمثل الخطوة التالية في البحث عن MicroPython "سريع" في استخدام @ micropython.viper بناء والوصول إلى سجلات المعالج الدقيق مباشرة (يمكن العثور على عناوين التسجيل
هنا .
import time @micropython.viper def f(): O = ptr32(0x60000300)
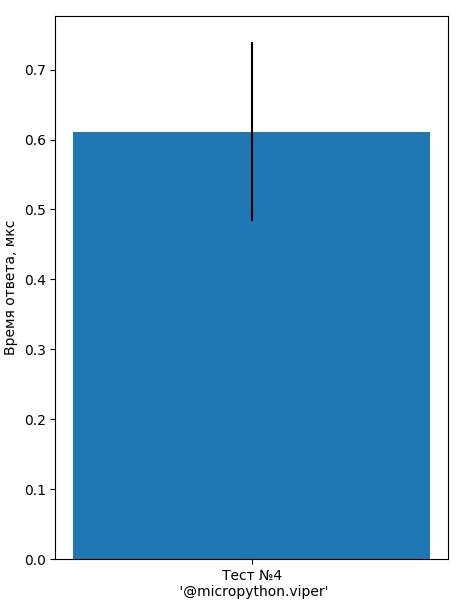
ونتيجة لذلك ، تسارعت الاستجابة بشكل ملحوظ:
زمن الاستجابة صغير جدًا ولا يمكن مقارنته بطرق أخرى (بحد أقصى 820 ns):
إذا لم يكن ذلك كافيًا ، فيمكنك استخدام أداة إدراج المجمّع من خلال @ micropython.asm_thumb decorator. مع هذه الطريقة ، لا يبقى الثعبان بشكل خاص (وتضيع المزايا العالية المستوى لبيثون) ، وإذا كانت هناك حاجة إلى سرعات أعلى ، فمن الأفضل استخدام أجهزة أخرى ، على سبيل المثال FPGA (حيث يمكن لبيثون أن يكون مفيدًا أيضًا ، انظر
هنا وهنا ).
UART
إذا كانت هناك حاجة لنقل الكثير من المعلومات بعد حدث ما ، يمكنك استخدام واجهة UART التسلسلية.
خذ على سبيل المثال خيارين للتنفيذ.
الأول هو من خلال معالجة المقاطعة:
import machine i = machine.Pin(4, machine.Pin.IN)
والاستجابة الموجي:
وقت الاستجابة الأقصى هو 248 μs.
والاختبار الثاني من خلال الافعى:
import machine import time i = machine.Pin(4, machine.Pin.IN)
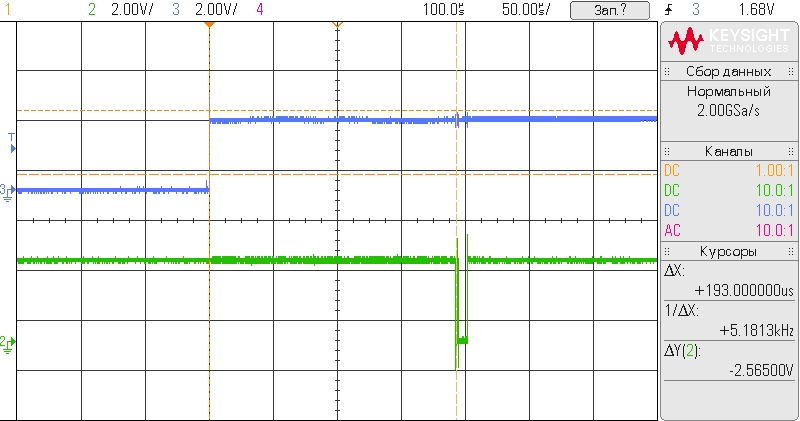
والشكل الموجي في الاختبار الثاني:
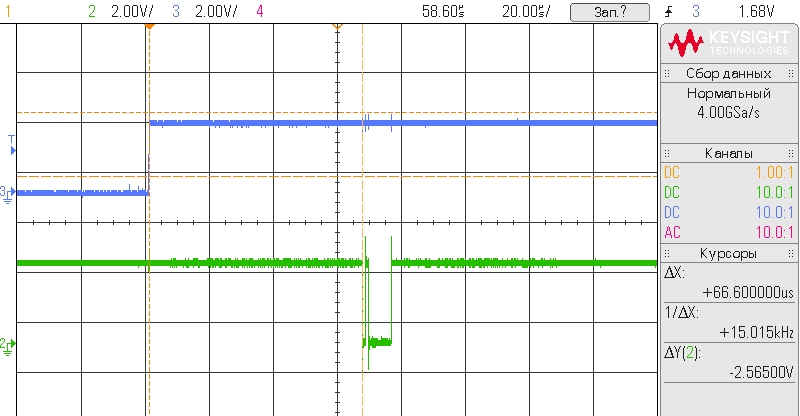
الحد الأقصى لوقت الاستجابة مع هذا الرمز هو 71 μs.
متوسط زمن التفاعل في اختبارين:
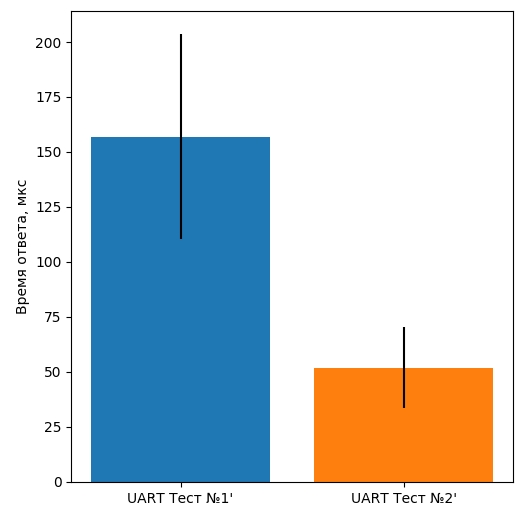
يتم تحقيق تسارع التفاعل بسبب الكشف السريع عن تأثير المدخلات في الاختبار الثاني.
استنتاج
يسمح لك MicroPython باستخدام أشياء مميزة للغات عالية المستوى (OOP ، معالجة الاستثناءات ، تصورات القائمة والقوائم ، إلخ) عند برمجة المتحكمات الدقيقة ، وإذا لزم الأمر ، تسريع رمز Python "الكلاسيكي" بشكل كبير.