مرحبا عزيزي habratchitel!لم تمر حتى أربع سنوات منذ أن رأى أول نموذج تشغيل لنظام
تحديد المواقع العالمي تحت الماء لدينا الضوء ، ومنذ ذلك الحين تناولنا
رطلًا من الملح وصنعنا كومة كاملة من الأنظمة والأجهزة المختلفة ، ولكن بناءً على إرادة القدر ، تجاوز اختبار واحد مهم حتى الآن بكرنا. في هذه المقالة سأخبرك كيف سارت الأمور.
كل من يهتم بموضوع الروبوتات التي تعمل تحت الماء والتحكم فيها وتصفحها - مرحبًا بك في القط على قوارب الكاياك المجمدة لدينا في مياه أبريل من خزان فولغوغراد!

(أختونج! هناك الكثير من الصور تحت القص!)
"... المكان الحقيقي للسفينة ، على الرغم من أنها معروفة ، ولكنها ليست عرضية
إنه ، لكنه غير معروف في أي نقطة ".
أليكشين الخامس والملاحة العملية الأخرى ، 2006. ص 71.
ما هو كل شيء؟
بالنسبة لأولئك الذين ليس لديهم وقت للقراءة على الإطلاق ، سوف أصف المشكلة بإيجاز:
لا يعمل نظام تحديد المواقع العالمي (GPS) تحت الماء ، ولا يعمل الاتصال اللاسلكي ، فكل التنقل تقريبًا يتم باستخدام الصوتيات ، ويتم الاتصال باستخدام الصوتيات والكابلات ، وغالبًا في المياه الصافية ، باستخدام
الضوء .
بالنسبة للقادمين الجدد ، سأقدم تقليديًا روابط لمنشوراتنا السابقة على المحور ، حيث نعلم كل شيء عن الاتصالات والملاحة تحت الماء: بدءًا من تاريخ إنشاء نظام تحديد المواقع العالمي تحت الماء ونقل صوت "فيديو" عبر المياه وتعليمات حول كيفية إنشاء هوائي صوتي بسيط من القمامة:
-
GPS تحت الماء من الصفر في السنة-
لقد صنعنا أصغر مودم سونار في العالم-
على تأثير البكتيريا الزرقاء على وظائف خطاب الرئيس-
صنع هوائي بسيط السونار من القمامة-
جلسة نقل الصوت عبر الفيديو مع التعرض-
تحت الماء "GPS" على اثنين من أجهزة الإرسال والاستقبال-
الملاحة تحت الماء: تحمل لا تحمل - أنت محكوم عليك النجاح-
GPS تحت الماء: تابعتقوم الطائرات التي تطير وتدور وتزحف على الأرض وتطفو على السطح بنقل الفيديو من كاميراتها في الوقت الفعلي ، وأحيانًا إحداثيات GPS ، ويعرف المشغل دائمًا مكان جهازه ، علاوة على ذلك ، يمكن للمشغل رؤيته دائمًا.
مع المركبات تحت الماء (TNPA أو ROV) ، كل شيء مختلف إلى حد ما. عند ترك الجهاز في المياه المظلمة ، يمكنك التأكد من شيء واحد فقط - إنه بالتأكيد تحت الماء.
أعمق قليلا في المشكلة
تأتي الأجهزة في فصول مختلفة ، مقسمة حسب الحجم والمهمة. أبسط وأصغر (مثلنا) ، التفتيش هي مجرد كاميرا فيديو على كابل مع المحركات. يمكن تجهيز
العينات الأكثر تعقيدًا والأكبر حجماً مع المتلاعبين وغيرها من التعديلات المثيرة للاهتمام ، وتأتي
بعض العينات بحجم الغزال كاملة مع سفينة متخصصة
وقراصنة وطاقم صعود وتبلغ سعتها الإجمالية أكثر من 200 حصان. يمكن أن تكون أطوال الكابلات من عشرات إلى مئات الأمتار في الأجهزة الصغيرة وتصل إلى آلاف الأمتار في الأجهزة الكبيرة الرئيسية.
يتم التحكم TNLA اسمياً من خلال الملاحظات المرئية - النظر إلى الصورة المرسلة من كاميرات الكاميرا عبر الكابل ، وأحيانًا تكون مجهزة بالسونار ، لأن الماء غائم
دائمًا في بعض الأحيان.
يحتوي هذا النهج على عيب واحد تمامًا: في الشاشة صورة لعنصر أفقي مهم ، من المستحيل تمامًا تحديد مكان تواجده بالضبط.
الملاحة تحت الماء
انهم يكافحون مع هذا العيب باستخدام أنظمة تحديد المواقع الصوتية. وكقاعدة عامة ، يضعون زنجبيل (ينبعث منه بشكل دوري إشارة خاصة) أو منارة مرسل مستجيب على الجهاز. يتم الكشف عن إشارة الزنبق ، وتحديد المسافة ، ثم ، بواسطة الزاوية (أو زاويتين - أفقية ورأسية) لوصول الإشارة والمسافة ، يتم تحديد موقع الجهاز. تسمى هذه الأنظمة UKB (اختصار لـ Ultrahort-Base). إنها تتعلق بجهاز قياس المسافة goniometric ولديها قائمة كاملة من العيوب ، خاصة فيما يتعلق بهذه المهمة. أبسط
تكلفة أجنبية من
17000 يورو ، لدينا
أيضا هناك ، ليس أسوأ وأكثر بأسعار معقولة ، ولكن لا يزال غير مجانا.
لتحديد الزوايا الأفقية (والأنظمة القديمة والعمودية ، في الزنجبيل الجديد ينقل عمقها) زوايا وصول إشارة المجيب أو الزنجبيل ، هناك حاجة إلى هوائي لإيجاد الاتجاه. الجهاز نفسه ليس بسيطًا ويتطلب التثبيت على قضيب ، والذي يجب تثبيته على متن سفينة. حسب المدى والعمق والزاوية الأفقية (أو حسب المدى وزاويتين) ، يتم تحديد الموقع النسبي للجهاز فقط. في هذه الحالة ، تنخفض الدقة مع زيادة المسافة.
تعتمد دقة تحديد الزاوية على:
- خصائص الهوائي نفسه وعادة ما تصل إلى حوالي 0.5-3 درجة ، وفي النظم الأكثر تقدما تصل إلى 0.03 درجة ، ولكن الأمر يستحق متعة المال الشيطاني فقط. واسمحوا لي أن أذكركم بأن درجة الحرارة 1 درجة على مسافة 1000 متر تعطي انتشارًا يبلغ 17 مترًا (أي 17 مترًا).
- حول كيفية تحديد موقع الهوائي نفسه (لفة وتقليم) ؛
- من الظروف الهيدرولوجية المحددة. على سبيل المثال ، من الممكن اكتشاف ليس إشارة مباشرة ، ولكن بعض الانعكاس أو مجموعها ، وبالتالي تحديد زاوية وصول الإشارة المنعكسة. ويمكن أن ينعكس من أي شيء - بما في ذلك من اتجاه مختلف تماما.
بعد تحديد المسافة وزاوية وصول الإشارة ، تحتاج إلى ربط كل هذا بالجغرافيا. وهذا يعني أنك تحتاج إلى معرفة الموقع الجغرافي لهوائي تحديد الاتجاه واتجاه الصفر بالنسبة إلى الاتجاه إلى الشمال. ثم يمكنك حل
المشكلة الجيوديسية المباشرة وتحديد موقع المركبة تحت الماء في الإحداثيات الجغرافية. وهذا يعني أنه لا يزال لديك بوصلة ونظام تحديد المواقع العالمي (GPS) على الهوائي.
بشكل عام ، أنا مقتنع بأنه يجب استخدام UHF فقط عندما يكون من المستحيل تمامًا استخدام الأنظمة الطويلة القاعدة.
أؤكد - بالتأكيد. على سبيل المثال ، عند وضع كائن قطره ، وتحتاج إلى قطع مسافة طويلة جدًا. في هذه الحالة ، سيكون من الضروري تحريك عناصر القاعدة الطويلة كثيرًا وسيؤدي ذلك إلى تكلفة الكثير من الوقت والجهد ، أو على سبيل المثال ، سيكون من المستحيل تثبيت عوامات ذات قاعدة طويلة على السطح نظرًا للعمق الكبير - الحبال الطويلة جدًا ، وبشكل عام ، ستكون هناك حاجة إلى نظام التثبيت معقدة للغاية. في جميع الحالات الأخرى ، أذكرك: استخدم قاعدة طويلة - إنها أسهل وأكثر موثوقية وأكثر دقة.
UKB جيدة ولا غنى عنها حيث تحتاج إلى العثور على شيء ، وتقترب تدريجياً من الدقة وزيادة. قد يبدو أنني ضد UHF و DB ، لكنني فقط أدعو لاستخدام المعدات وفقًا للغرض المقصود منها. في النهاية ، فعلنا أيضًا الكي جي بي ، وفي ضوء ذلك ، من الصعب اتهامي بالتحيز.
أنظمة طويلة المدى (DB) - يحدث ذلك عندما يكون هناك عدة مستقبلات أو أجهزة إرسال بعيدة المسافة (على سبيل المثال ، يعد GPS نظامًا بعيد المدى). يحافظون على دقتهم داخل القاعدة ، فهم أقل عرضًا للنغمة ، ويقدمون عمومًا نتائج أفضل كثيرًا ، نظرًا لارتباطهم بأيٍ من أنظمة تحديد المدى أو اختلاف المدى.
لفترة طويلة لم أتمكن من الإجابة على السؤال - لماذا يحاول كل شخص أن يطرق المسامير بمجرفة؟ لكن بمرور الوقت ، توصلت أنا وزملائي إلى نتيجة مخيبة للآمال: أولاً ، يفكر الناس بكل بساطة - هوائي واحد ورابع واحد أسهل من عدة عناصر ذات قاعدة طويلة متباعدة عن بعضها البعض. ثانياً ، حتى وقت قريب ، كانت أنظمة DB ممثلة فقط بما يسمى القاعدة السفلية ، والتي يتطلب تركيبها وقتًا ووقتًا خطيرًا للغاية.
لقد كنا منذ فترة طويلة في حملة صليبية ضد
أمية مستخدمي النظام المعمول بها من الأشياء. بدأ هذا عندما قمنا بتقديم المثال الأول لنظام تحديد المواقع العالمي تحت الماء ، وهو نظام طويل القاعدة ذو سطح وليس قاعدة سفلية.
GPS تحت الماء
دعنا نعود إلى بطل اختبار اليوم. يمثل نظام الملاحة قاعدة التنقل نفسها ، التي يتكون من أربعة
عوامات - مكررات عائمة لإشارة GNSS:

يتم تثبيت العوامات قبل بدء العمل على البركة بمساعدة المراسي والحبال. كل ما يجب القيام به هو إطلاق العوامة في المرساة ، قبل ذلك بالنقر فوق المفتاح. هذا هو حقا كل ما يجب القيام به.
عنصر آخر من عناصر النظام هو مستقبل الملاحة الموجود على جسم ما تحت الماء:

يتم
تركيب مستقبل الملاحة
RedNODE (الاسطوانة الصفراء الصغيرة) في الجزء الخلفي من الوحدة. يتم تشغيله عن طريق الشبكة الموجودة على الروبوت وينقل البيانات عبر كابل الجهاز.
نظرًا لأن العوامات لا تصدر إلا ، ولا تقبل المستقبِلات (تعمل وفقًا لمخطط التفاضلية) ولا أحد يزعج أي شخص ، فعندئذٍ يمكن لأي عدد من هذه المستقبلات العمل على مجموعة واحدة من العوامات في منطقة مائية واحدة. وهذا هو ، نظريا أسطول كامل من المركبات تحت الماء والغواصين في أي كميات ونسب يمكن التنقل من الناحية النظرية.

بسبب الاندفاع ، قمنا بدلاً من ذلك بتثبيط مستقبل الملاحة وإضافة بعض الطفو المصنوع من مواد عازلة للحرارة الكثيفة.
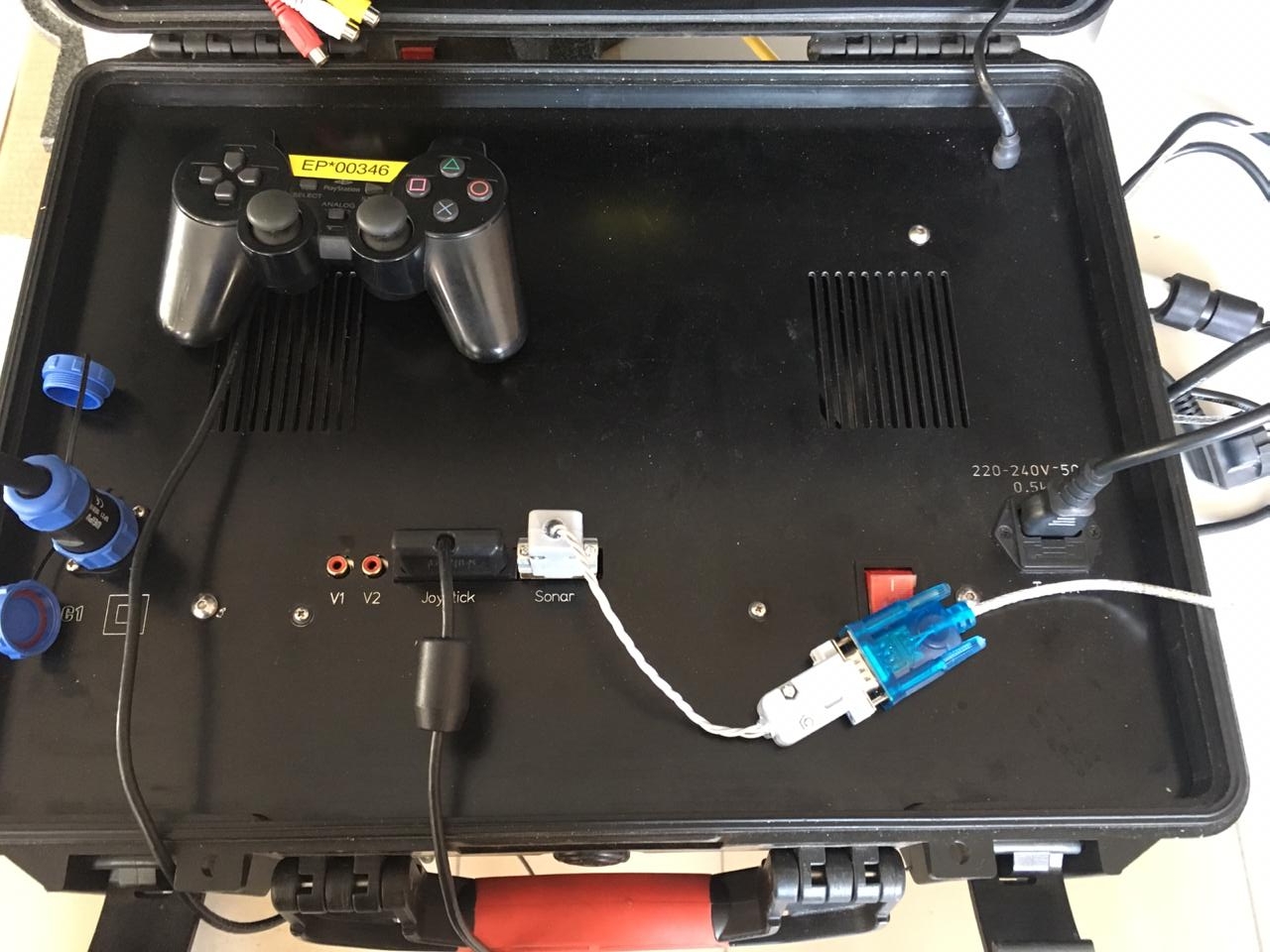
تدخل البيانات من جهاز الاستقبال إلى علبة التحكم ويتم إدخالها في أي كمبيوتر محمول عبر محول USB RS232 <-> (موصل "Sonar" في الصورة).
يتم إنشاء الإحداثيات في هذا النظام عند المستقبِل (على سبيل المثال ، مصطلحًا صارمًا ، النظام عبارة عن نظام ملاحة وليس نظام تحديد المواقع). ولكن نظرًا لأن TNLA تعمل على كبل ، من حيث المبدأ ، يجب ألا تكون هناك مشاكل في نقل الموقع المحسوب على الجهاز إلى الكبل لأعلى. بالمناسبة ، يحاكي جهاز استقبال الملاحة جهاز استقبال GNSS منتظم ويمكن توصيله مباشرة باعتباره مستقبل GPS الأكثر شيوعًا العادي ، على سبيل المثال ، لتطبيق
SAS.Planet ، الذي نقوم به.
كان وضع الروبوتات تحت الماء هو الفكرة الرئيسية التي أعادتنا في عام 2015 ، عندما بدأنا تطوير نظام تحديد المواقع العالمي تحت الماء. المفارقة في المصير هي أنه كان هذا التطبيق الذي بقي لم يطالب بها أحد حتى عام 2018 - كان النظام يستخدم أساسا في أداء الغوص.
ويرجع ذلك جزئيًا إلى حقيقة أن مصنعي TNLA يترددون في تعديل أجهزتهم ، ويرجع ذلك جزئيًا إلى حقيقة أن المستخدمين لديهم تحيز قوي للغاية بأن وضع العوامات أمر صعب ويستغرق وقتًا طويلاً.
الآن يتم إجراء جهاز الفصل الدراسي من قبل الجميع ومتنوعة ، حرفيًا ، لقد فقدنا عددًا بالفعل. فيما يلي قائمة كاملة من الشركات المصنعة للوضوح:
- كله
TOP-10 2019- وآخر
TOP-12 2019-
وحتى آخر TOP ، وهذه الميزانية الميزانية الأجهزة
- لدينا
ROVBUILDER-
المشهود OpenROV-
الجهاز الكندي
-
GNOM المحلي
- شيء
مثير للريبة يشبه
Blueye-
جهاز آخر
هناك أكثر من عشرة فرق جامعية مختلفة ، بالإضافة إلى ذلك ، إذا نظرت ، فلا تزال هناك مجموعة من المشاريع المماثلة ، نظرًا لأننا لم نلمس حتى أجهزة الطبقة العاملة الأكبر حجماً وأي أجهزة مستقلة (ما يسمى AUV أو AUV).
أنها تختلف قليلاً عن بعضها البعض ، ولها وظائف مماثلة للغاية. نعتقد أن الشركات المصنعة الآلية التي ستزود أجهزتها بنظام ملاحة بسيط وموثوق بها ستحصل على ميزة حاسمة.
عندما بدأنا الثلاثة ، كان أحدنا (
Creathor ) في موسكو ، وكان يعتني بكافة المسائل التنظيمية والمالية والتسويقية ، وكانت I و
StDmitriev في Volgograd ،
وقمنا بتجميع الركبتين في الماء البارد معًا من قارب قابل للنفخ تم شراؤه في العشاري. في الوقت المناسب ، استغرقنا 15 إلى 30 دقيقة. هذا جزئيًا لماذا ، عندما يخبرونني أن وضع العوامات أمر صعب وطويل ،
فإن يدي تصل إلى ماوزر وعادة ما يعبر وجهي عن الحيرة.
لا يزال أعمق
لذا ، هذه المرة ، بإجراء الاختبارات الأربعة ، ندخل كل شيء في سيارتين للركاب:

هذه الأمتعة كانت مطلوبة للاختبار:
- ROVBUILDER RB-150 مركبة تحت الماء مع كابل بطول 100 متر وحالة تحكم
- الحال مع أربعة العوامات RedBASE
- مولد البنزين بقدرة 800 وات
- قوارب نفخ مزدوجة "Shuya"
- طاولة قابلة للطي مع أربعة كراسي قابلة للطي
- أربعة ألواح رصف مع حبال 20 متر كمراس
- كمبيوتر محمول
- مخزون الطعام لمدة 5-6 ساعات لأربعة أشخاص
مع كل بساطة المظهر ، لن نتمكن من العمل مع نظام UHF مع مجموعة من القوارب - لتركيب هوائي UHF ، فأنت بحاجة إلى قارب ذو قاع صلب وقضيب. في الوقت نفسه ، ستكون هناك حاجة إلى أن تكون على الماء طوال الوقت. هذا ، على سبيل المثال ، عند درجة حرارة 0 درجة ليس مريحًا جدًا ، وأحيانًا يكون ذلك مستحيلًا ببساطة (راجع "الرياح والأمواج والأرض").
تم نشر "مركز التحكم" في حوالي 10 دقائق ، وفي حالتنا بدا الأمر كما يلي:

تقليديًا ، يتم إجراء جميع الاختبارات التي تتطلب خزانًا واسعًا إلى حد ما عند
مصب نهر بيتشوجا ، في المكان الذي يتدفق فيه إلى خزان فولغوغراد.
الغوص أبعد من ذلك
ذكرت أنه عادة ما يتم تثبيت العوامات في 15-30 دقيقة ، وهذه المرة لم يكن استثناء. علاوة على ذلك ، لقد بدأت ساعة التوقيت بشكل خاص ، وتمكن شخصان على متن قوارب الكاياك من القيام بذلك في غضون 24 دقيقة ، في المجاذيف ، قتالًا مع الريح والإثارة ، مثل البابانين الحقيقيين.

توضح الصورة كيف توجد العوامات في زورق صغير قابل للنفخ. كل أربع قطع.
قد تعتقد أن الجهاز مغمور أيضًا من قارب ، ولكن ليس على الإطلاق: يتم جلب الجهاز إلى الماء من الشاطئ بمساعدة شخص مجهز بزوج من الأحذية المطاطية:

وهنا هي الصور الأولى للعالم تحت الماء:
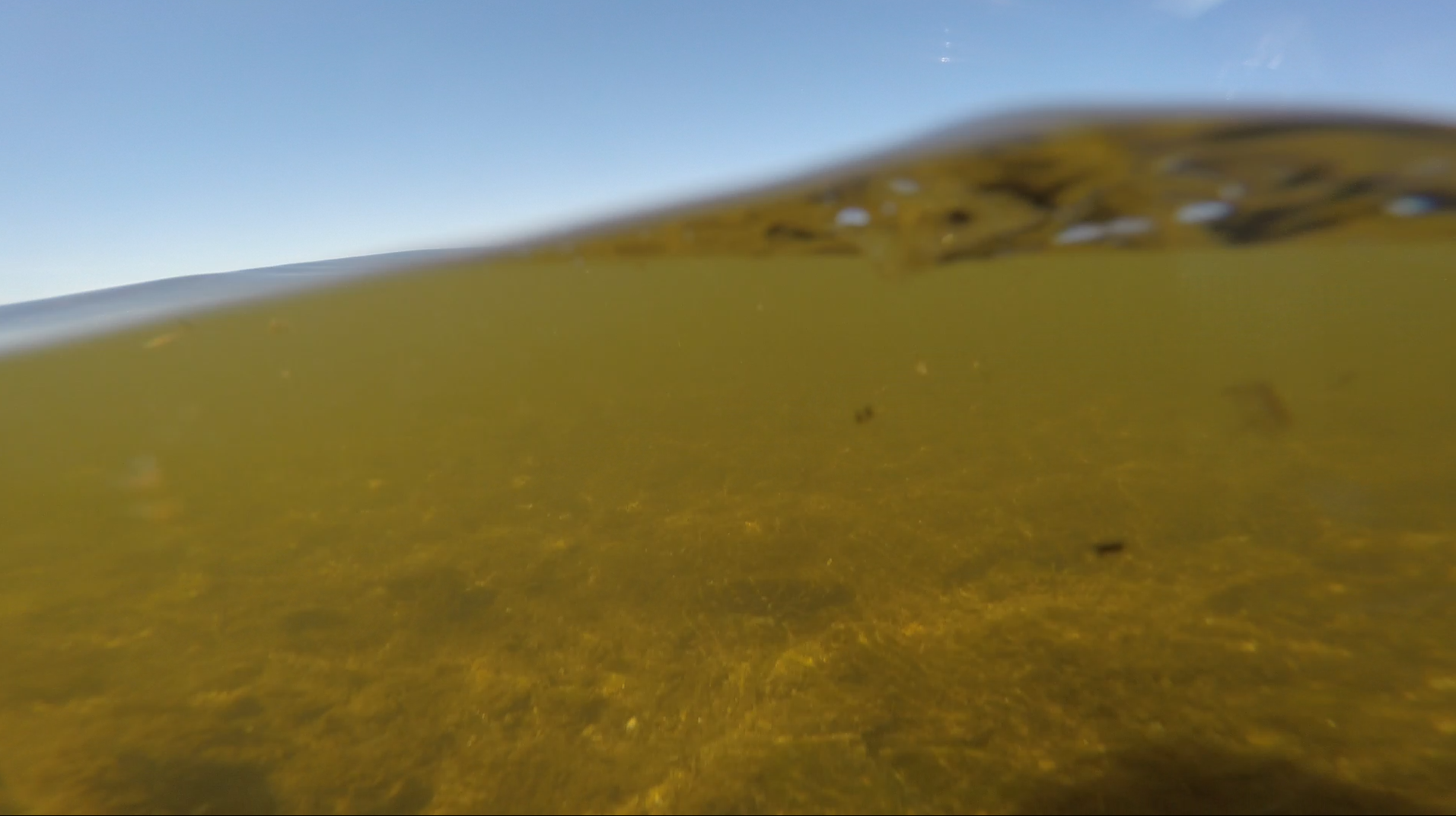

نعم ، ليس هذا هو البحر الأحمر بالنسبة لك :-) يبدو الماء شفافًا ، ولكن في الواقع فإن الرؤية بالقرب من الساحل لا تتجاوز 1-2 متر.
أصبحت المشكلة الخطيرة واضحة على الفور - على شاشة المشغل في يوم مشمس ، لا يوجد شيء واضح بشكل حازم (باستثناء انعكاسه):

في الوقت نفسه ، يتم تثبيت GoPRO HERO3 + ككاميرا على الروبوت. لقد شعرنا بالضيق والإحباط بسبب هذه الحقيقة ، لكن كان من المستحيل تمامًا التحكم في الصورة ، بالنظر إلى الشاشة الوامضة الجهنمية. ربما ستزيل بعض الشاشة هذا العيب. بعض صناع الروبوت ، بالمناسبة ، يزودون منتجاتهم بنظارات الواقع الافتراضي.
بعد الحقيقة ، عند تحميل الفيديو من كاميرا الكاميرا ، أصبح إحباطنا أكثر عمقًا: الصورة جيدة من حيث المبدأ ، ومن الممكن تمامًا التعامل معها. يا للأسف أننا لم نرى كل هذا في هذه العملية!
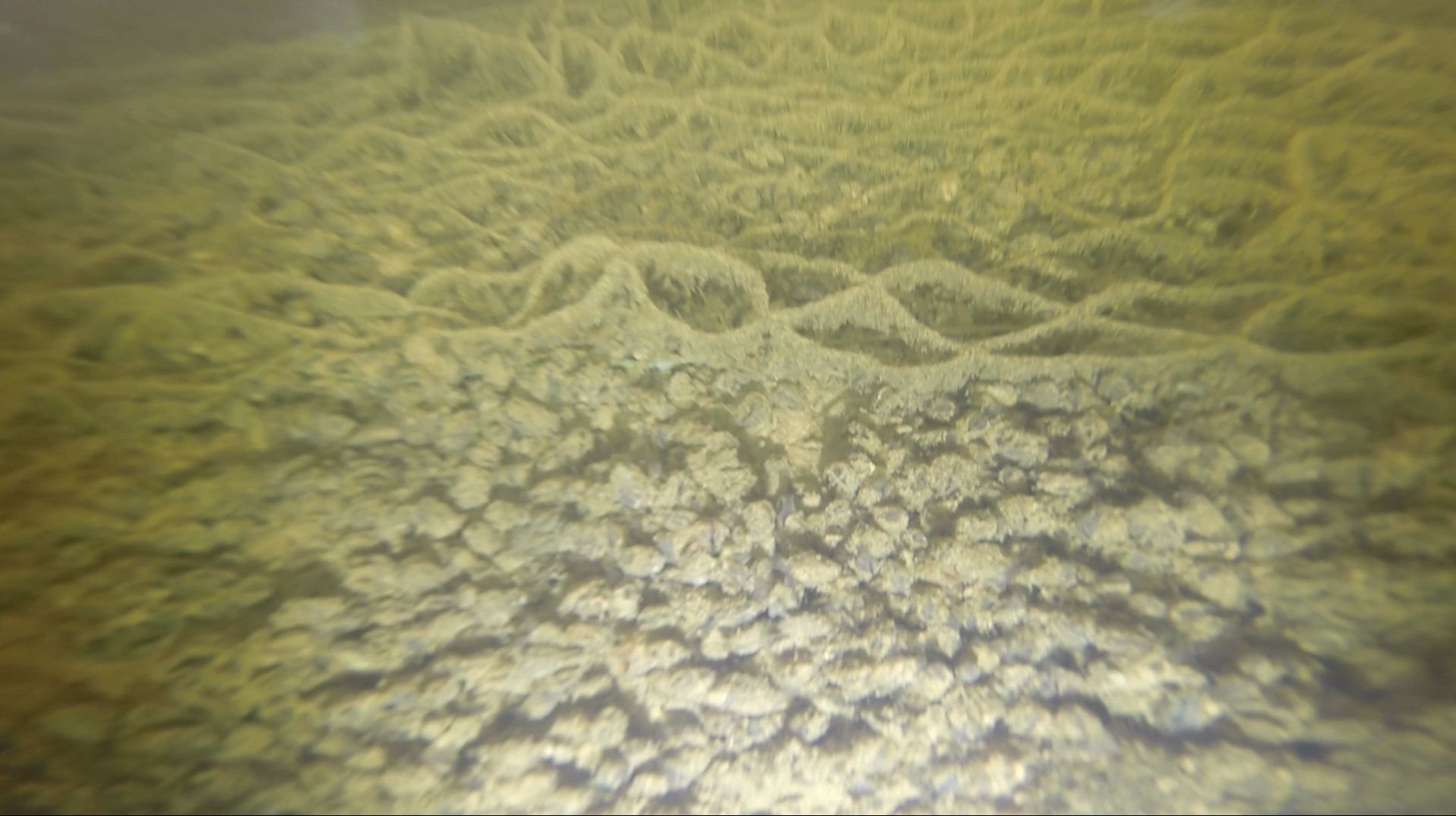
وهنا أول لمسة من أسفل وعناصر المشهد "القمري" على عمق 13 مترا:

بعد بضع ثوانٍ حرفيًا ، وبعد أن أبحرت قليلاً للأمام ، واجه الجهاز سجلاً غمرته المياه ، غارقًا في الأصداف الصغيرة:

في الواقع ، فإن جودة الصورة أفضل قليلاً ، لكن علي التقاط لقطات شاشة من الفيديو الذي تم التقاطه باستخدام GoPRO على متن الطائرة.
في الصورة التالية ، إذا نظرت عن كثب ، في الزاوية العلوية اليمنى ، يمكنك رؤية أول سمكة تصادف في طريق
crucian البريدية :

في عملية الاختبار ، لم نعلم بعد أن الكاميرا كانت تكتب صورة جيدة وأحيانًا ممتازة وكانت في حيرة شديدة من الحاجة إلى التحكم في الجهاز بشكل أعمى.
ومع ذلك ، قرروا التمسك سيناريو محدد سلفا. كان من المفترض إغراق كائن مرئي بسهولة من القارب ، وحفظ إحداثيات هذا المكان بمساعدة هاتف GPS ، ثم حاول الوصول إلى هذا المكان باستخدام روبوت ، مسترشداً بمؤشرات نظام الملاحة لدينا.
نظرًا لأن النص يتم قراءته عادةً قطريًا دون إيلاء الاهتمام اللازم للتفاصيل ، أخلص إلى أنه في هذا النظام في جهاز الإرسال الصوتي للعوامات ، يجب أن يكون لف محول المحول التدريجي من الخشب ، في حين سيتم حث EMF الخشبي فيه ويتدفق التيار الخشبي.
في أحد الممرات الموجودة أعلى القاع ، التقطت كاميرا الكاميرا شبكة صيد غارقة:
عند هذه النقطة ، تنتهي المشاهد التي حصلنا عليها تحت الماء في عملية الاختبار هناك.
من يريد تقييم جودة الفيديو بأعينهم ، نعلق رابطًا على
أحد السجلات على youtube . يتم إعطاء السجل دون أي معالجة وتحرير. يمكن لأولئك الذين يرغبون في الوصول إلى استنتاج مستقل حول راحة إدارة وتنفيذ إجراءات ذات مغزى تحت الماء (على سبيل المثال ، البحث عن شيء ما) فقط بواسطة الصورة من الكاميرا ، دون التنقل.
لقد توصلنا إلى استنتاج مفاده أنه من المستحيل تمامًا التحكم في الجهاز باستخدام الصورة فقط ؛ في الأساس ، تم توجيهنا فقط من خلال نظام الملاحة الخاص بنا ، والذي أظهر عبر الإنترنت الموقع الحالي للجهاز على الخريطة.
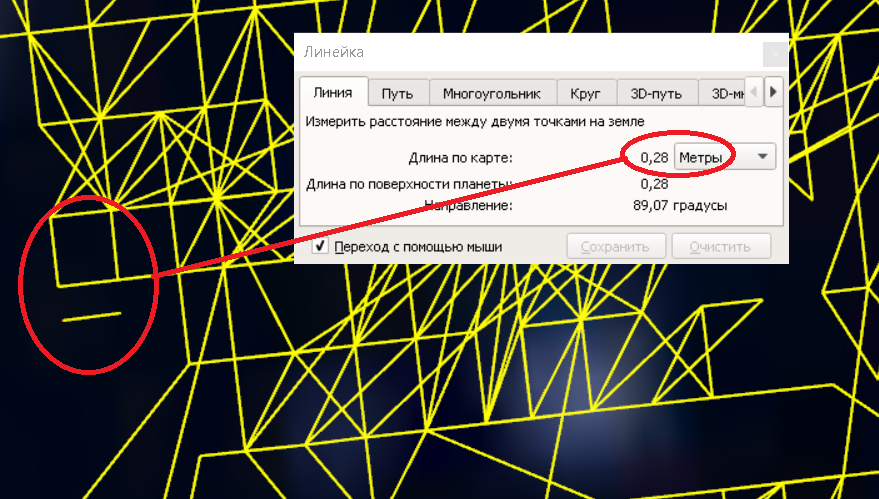
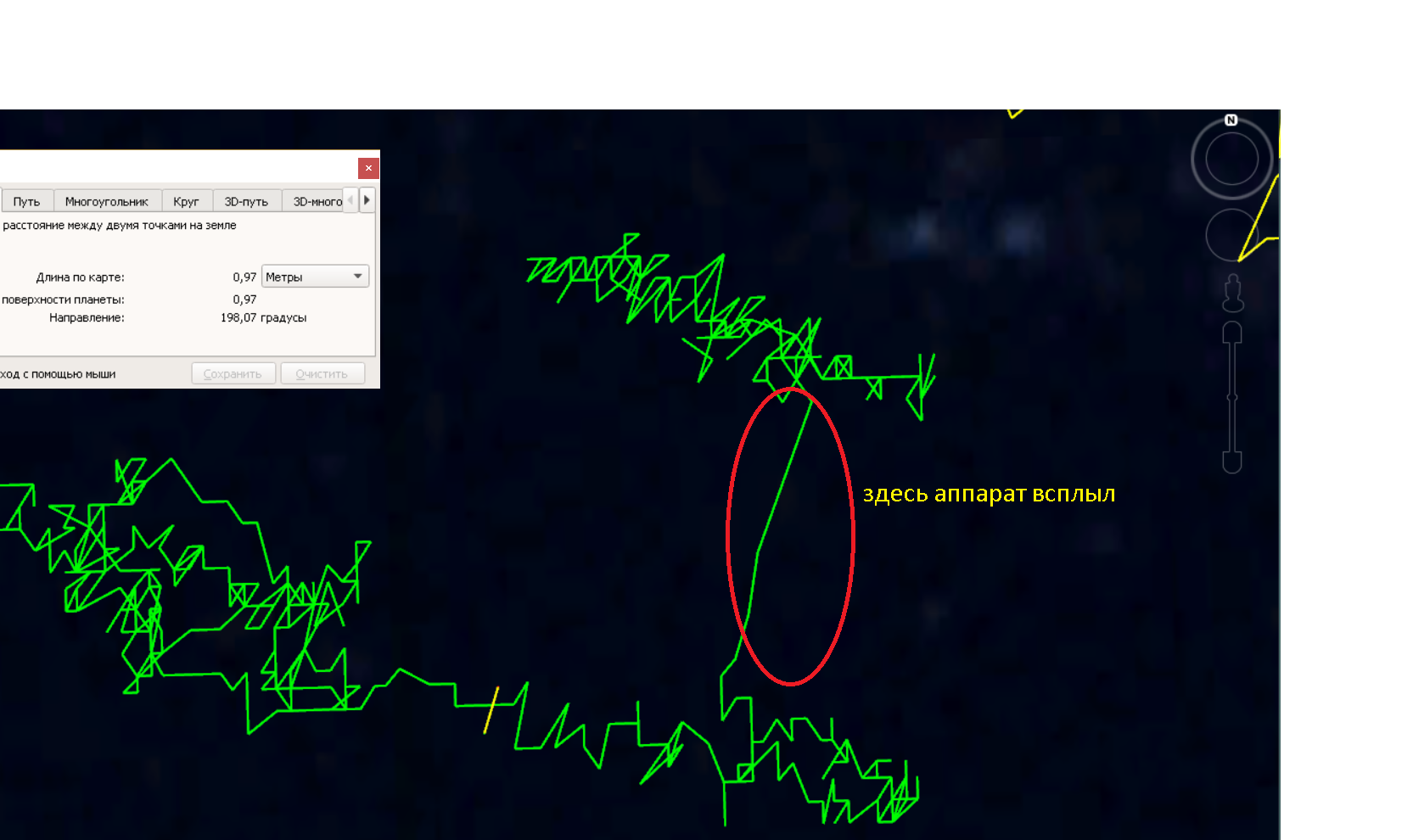
يعد حل النظام في خزان حقيقي ، والذي يبلغ حوالي 30 سم ، ممتعًا ، كما يمكن رؤيته من الشبكة التي رسمها المسار:
كما هو الحال في حالات أخرى ، فإن انتشار النقاط أثناء الحركة يقع في نطاق 1-1.5 متر:
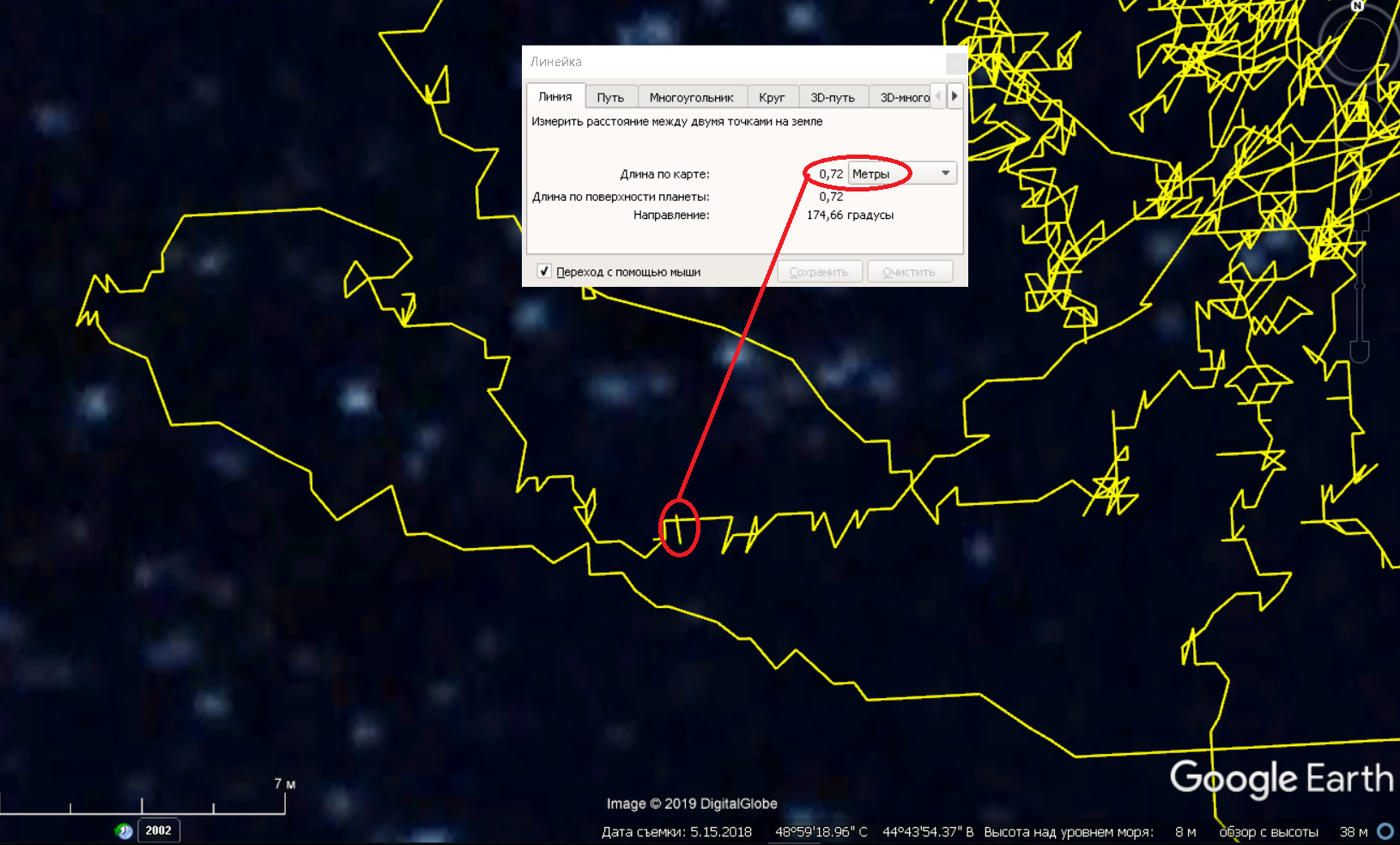
يبدو المسار النهائي لحركة الجهاز كما يلي:
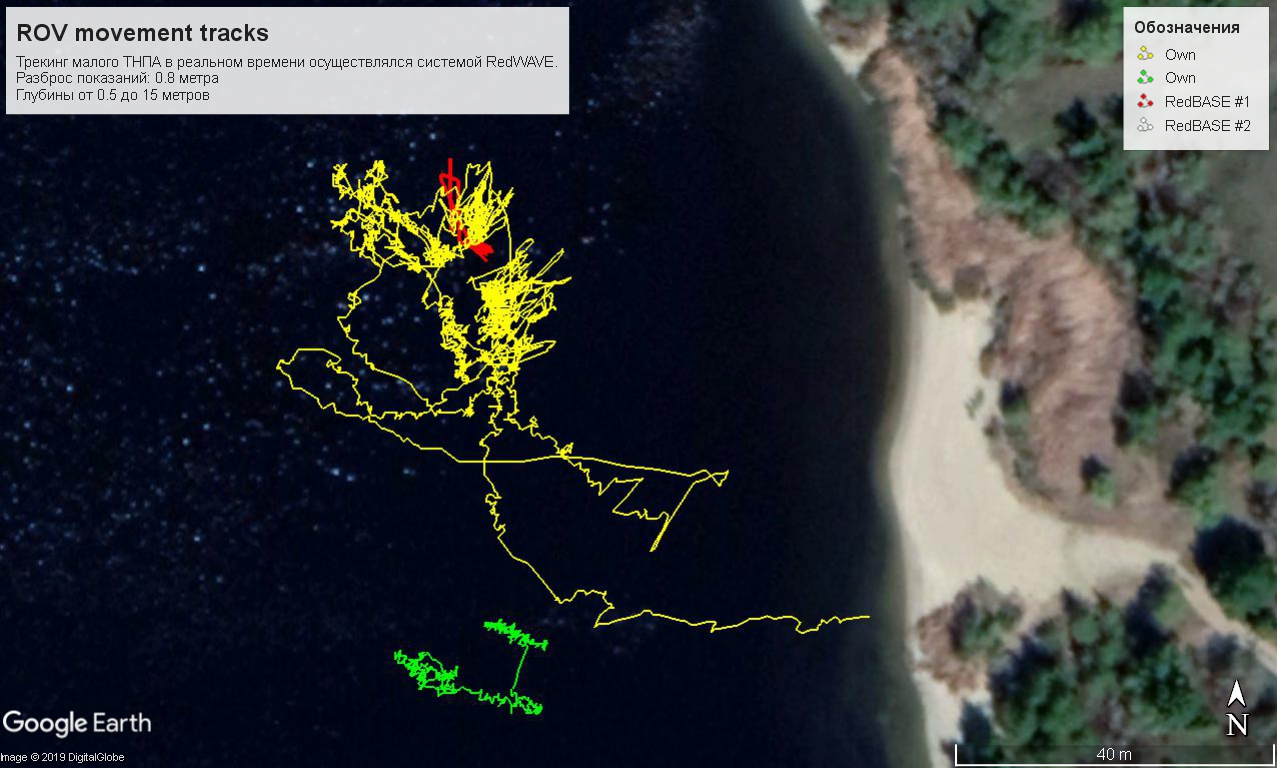
على الرغم من أننا لم نحسب مكان العمل ، إلا أن نصف المسار تقريبًا (الجزء الأيسر من الخطوط الحمراء) يقع خارج القاعدة ، أي خارج الرقم العوامة ، حيث يجب أن يعمل النظام أسوأ بكثير. ومع ذلك ، باستثناء عدد قليل من الانبعاثات ، فإن النظام يعمل بشكل طبيعي.
وفي أحد الممرات ، اقترب الجهاز من الموقع المقترح لإغراق الكائن:

ولكن بمشاهدة دقيقة لمدة ساعة أو أكثر من الفيديو المسجل بواسطة الكاميرا الموجودة على متن المركبة ، لم نر أبدًا الهدف المطلوب.
قد يكون هناك عدة أسباب لذلك: أولاً ، بالنسبة لنا ، هذه هي أول تجربة للسيطرة على الجهاز في جسم حقيقي من الماء ، وثانيًا ، حرمتنا شاشة التوهج من فرصة "عبر الإنترنت" لمراقبة ما يحدث في المياه القريبة من الجهاز. ثالثًا ، يتفاعل الجهاز
بقوة شديدة مع "دوران عجلة القيادة" ويصعب للغاية التحكم فيه من وضع غير معتاد ، ومن الصعب حتى الحفاظ على حركة مستقيمة.
فقط في حالة ، أرفق
المسار الناتج حتى يتمكن من يهتمون بأنفسهم من تحريفه.
أسفل
في الختام ، أود أن أقول إننا جميعًا مثل الحجر سقط من الروح - اختبرنا النظام أخيرًا للغرض المقصود منه.
حصلنا على نتيجة جيدة للغاية (وتجربة!) ، تمكنت من إدارة مركبة تحت الماء ، وحساء الفطر المطبوخ على الفحم ، والتقاط صورة وكان يومها إيجابيًا بشكل عام.شكرا لك على اهتمامك ، كالعادة ، سنكون ممتنين بلا حدود لردود الفعل والنقد البناء!UPD!
وضعنا مقطع فيديو قصير مع بعض التفسيرات . بما في ذلك عملية عرض مسار الجهاز في الوقت الحقيقي في SAS.Planet