إذا كنت قد كتبت أي وقت مضى برنامجًا للتحكم في ذراع الروبوت أو أي آلية شبيهة بالروبوت بشكل عام بأكثر من ثلاث درجات من الحرية ، فأنت تعلم أن معظم الوقت يستغرق لبرمجة الحركات نفسها. تخيل الآن أنك صنعت ذراعًا آليًا عن طريق توصيل الروابط ومحركات الأقراص كما تريد ، وحدد البرنامج أطوال الروابط ومواقعها وزوايا دورانها وما إلى ذلك.
هذا بالضبط ما فعله باحثو Columbia Research عندما كتبوا برمجيات
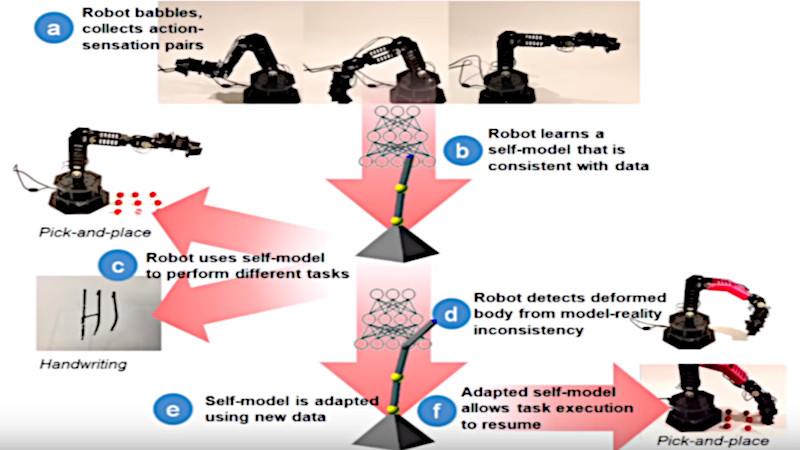
تتعرف على كيفية إنشاء ذراع آلية تتحكم فيه ، دون وجود فكرة أولية عن الفيزياء ، أو الهندسة ، أو الخصائص الديناميكية للمحركات. مباشرة بعد الإطلاق الأول ، لا يعرف شكل الروبوت ، وكيف تعمل محركاته ، وكيف يؤثر كل واحد منهم. لنحو يوم ونصف ، عند القيام بحركات حذرة في البداية تبدو عشوائية ، وتلقي ملاحظات حول ما يحدث ، سيقوم البرنامج الذي يستخدم تدريبات متعمقة بتكوين جهاز محاكاة مدمج فيه بحيث يكون الروبوت الافتراضي فعليًا قدر الإمكان.
يقوم مدير المشروع Lipson وطالب الدراسات العليا روبرت Kwiatkowski بتجارب ذراع مفصلية بأربع درجات من الحرية. في بداية التدريب على البرامج ، كان النموذج غير دقيق ، ولم يتم تحديد ترتيب الربط. بعد 35 ساعة من التدريب ، يتوافق النموذج مع الواقع بدقة لا تقل عن أربعة سنتيمترات. ثم ، أجبر البرنامج roboruk على أخذ الأشياء ونقلها ، بينما كانت هناك إعادة معايرة إضافية بعد كل حركة وفقًا لنموذج تم تكوينه فقط بواسطة تدريب مستقل.
لتحديد ما إذا كان يمكن لمثل هذه البرامج اكتشاف تلف ذراع robor ، تم طباعة برنامج مشابه ولكنه مشوه بشكل خاص بدلاً من أحد الأجزاء. قرر البرنامج أنه قد تم تغييره وإجراء التغييرات المناسبة على النموذج. قريباً ، كان يؤدي مهام رفع وتحريك الأجسام أسوأ قليلاً فقط.
نظرًا لأن الفكرة الداخلية للبرنامج حول جهاز الروبوت ليست ثابتة ، فإن هذا لا يسمح فقط بالعمل بشكل أفضل وأفضل ، ولكن أيضًا للتكيف مع الضرر والتغيرات الهيكلية. أيضًا ، سيستمر كل شيء في العمل مع التآكل التدريجي للأجزاء واستبدالها بأشكال مختلفة قليلاً.
بالطبع ، لن تصبح roboruk التي تديرها مثل هذه البرامج في القريب العاجل دقيقة مثل
Dexter ، وهي roboruk مع البرامج التقليدية التي قدمت لمطوريها جائزة في مسابقة Hackaday 2018 ، ولكن من المثير للاهتمام أن نرى كيف تعمل: