مقدمة
إن مركبة StarLine غير المأهولة المعتمدة على نظام
Lexus RX 450h عبارة عن مشروع بحثي تم إطلاقه في عام 2018. المشروع مفتوح للمهنيين الطموحين من
مجتمع المصادر المفتوحة . نحن نقدم للجميع المشاركة في عملية التطوير على مستوى الكود ، لاختبار خوارزمياتهم على سيارة حقيقية مزودة بمعدات باهظة الثمن. للسيطرة على السيارة ، تقرر استخدام Apollo ، إطار مفتوح. لكي يعمل Apollo ، نحتاج إلى توصيل مجموعة من الوحدات النمطية. تساعد هذه الوحدات البرنامج في تلقي معلومات حول السيارة والتحكم فيها وفقًا للخوارزميات المحددة.
هذه الوحدات تشمل:- وحدة لتحديد المواقع سيارة في الفضاء باستخدام إحداثيات GPS ؛
- وحدة للتوجيه ، والتسارع والكبح للسيارة.
- نموذج لحالة أنظمة السيارة: السرعة ، التسارع ، وضع عجلة القيادة ، الضغط على الدواسات ، إلخ ؛
- وحدة للحصول على معلومات حول بيئة السيارة. أجهزة الاستشعار بالموجات فوق الصوتية ، والكاميرات ، والرادارات والدرنات يمكنها التعامل مع هذا.
بادئ ذي بدء ، واجه فريقنا مهمة تعلم التحكم في عجلة القيادة والتسارع وكبح السيارة. وتلقي أيضًا معلومات حول حالة أنظمة السيارة. لهذا ، تم القيام بالكثير من العمل لدراسة حافلة لكزس CAN.
الجزء النظري
ما هي حافلة CAN؟
في السيارات الحديثة ، سيطرت الأنظمة الإلكترونية على جميع الأنظمة (الشكل 1.). المكونات الإلكترونية عبارة عن أجهزة كمبيوتر متخصصة ، يحتوي كل منها على جميع الواجهات اللازمة للتكامل مع السيارة. باستخدام واجهات الاتصالات الرقمية ، يتم ربط الوحدات لتبادل المعلومات مع بعضها البعض. الواجهات الرقمية الأكثر شيوعًا في السيارات هي CAN و LIN و FLEXRay. من هذه ، يمكن استخدام CAN على نطاق واسع.
حافلة CAN (شبكة منطقة المراقب) هي الشبكة القياسية للصناعة. في عام 1986 ، تم تطوير هذا المعيار بواسطة بوش. وأول سيارة مع حافلة CAN كانت مرسيدس بنز W140 ، التي صدرت في عام 1991. تم تطوير المعيار للسماح للأجهزة بالاتصال مع بعضها البعض دون مضيف. يتم تبادل المعلومات باستخدام رسائل خاصة ، والتي تتكون من حقول الهوية وطول الرسالة والبيانات. كل كتلة لديها مجموعة من المعرفات الخاصة بها. في هذه الحالة ، يكون للرسالة ذات المعرف الأقل أولوية على الناقل. يمكن أن يحمل حقل البيانات معلومات ، على سبيل المثال ، عن حالة الأنظمة وأجهزة الاستشعار ، وأوامر آليات التحكم ، إلخ.
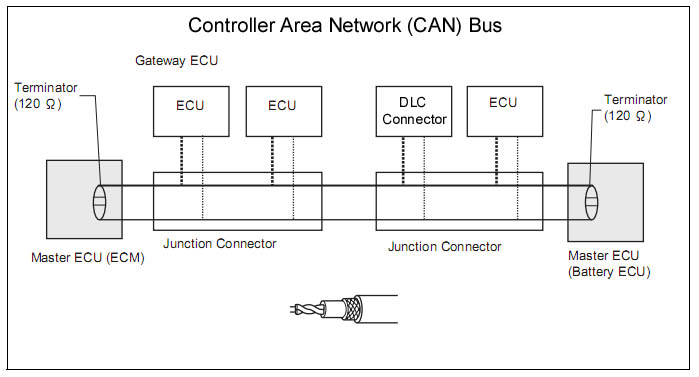 التين. 1. حافلة CAN مركبة.
التين. 1. حافلة CAN مركبة.على المستوى المادي ، الحافلة هي زوج ملتوي من الموصلات النحاسية. يتم إرسال الإشارة التفاضلية ، والتي تتحقق بسبب مناعة الضوضاء العالية.
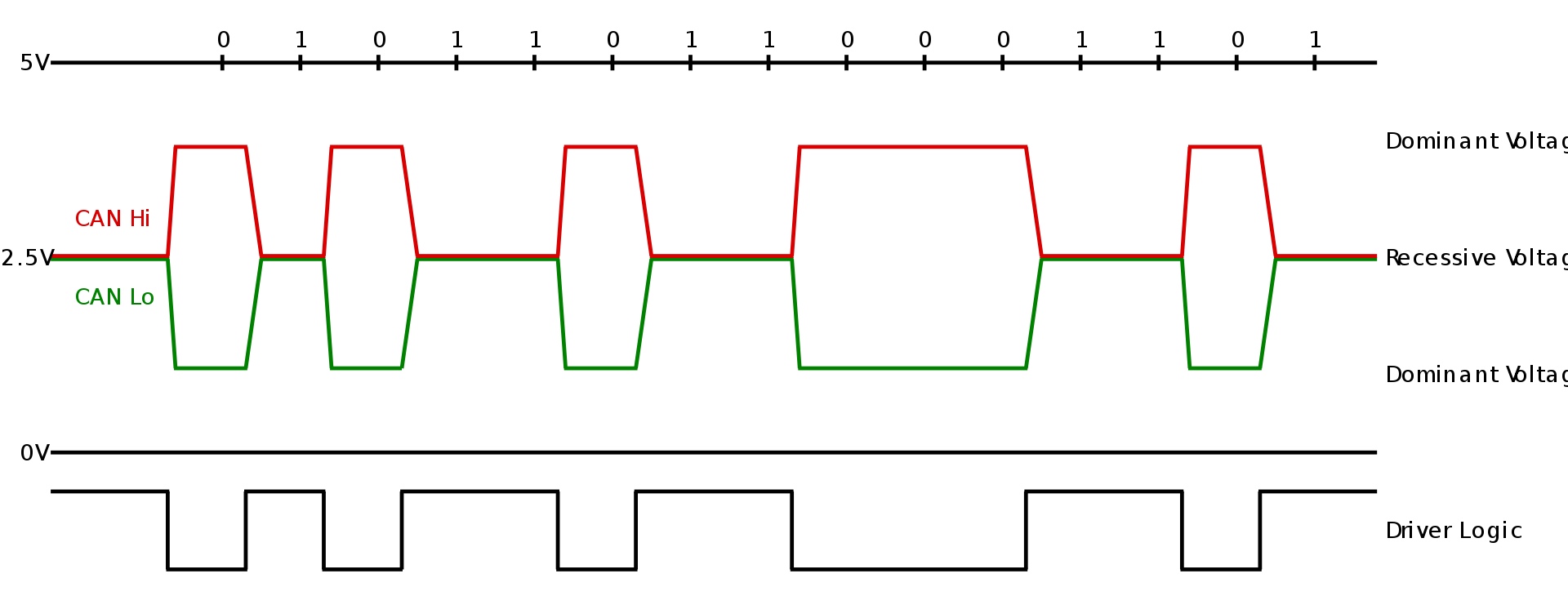 التين. 2. التمثيل المادي للإشارة على حافلة CAN
التين. 2. التمثيل المادي للإشارة على حافلة CANعبر حافلة CAN ، يمكنك الحصول على معلومات حول حالة مختلف أجهزة الاستشعار وأنظمة المركبات. أيضا عن طريق CAN ، يمكنك التحكم في مكونات السيارة. هذه هي الفرص التي نستخدمها لمشروعنا.
لقد اخترنا لكزس RX لأننا عرفنا أنه يمكننا إدارة جميع العقد الضرورية عبر CAN. لأن أصعب شيء عند البحث عن سيارة هو البروتوكولات المغلقة. لذلك ، كان أحد أسباب اختيار طراز السيارة هذا هو وجود وصف لجزء بروتوكول ناقل CAN في مشروع Openpilot مفتوح المصدر.
إن قيادة السيارة بشكل صحيح تعني فهم كيفية عمل الأجزاء الميكانيكية لأنظمة السيارة. كنا بحاجة إلى فهم جيد لكيفية العمل مع مضخم الطاقة الكهربائية أو التحكم في تباطؤ السيارة. في الواقع ، على سبيل المثال ، عندما يتم تشغيل العجلات ، فإنها تخلق مقاومة للتوجيه ، والتي تفرض قيودًا على التوجيه عند الدوران. لا يمكن استخدام بعض الأنظمة دون دخول السيارة في أوضاع تشغيل خاصة. كان علينا أن ندرس هذه التفاصيل وغيرها في هذه العملية.
قيادة كهربائية
توجيه القوة الكهربائية EPS (نظام التوجيه الكهربائي) هو نظام مصمم لتقليل قوة التوجيه عند الدوران (الشكل 3). تتحدث البادئة "الكهربائية" عن نوع النظام - كهربائي. يصبح توجيه عجلة القيادة مع هذا النظام مريحًا ، ويقوم السائق بإدارة عجلة القيادة في الاتجاه الصحيح ، ويساعد المحرك الكهربائي في تحويلها إلى الزاوية المطلوبة.
يتم تثبيت مضخم الطاقة الكهربائية على عمود التوجيه للسيارة ، والتي يتم توصيل أجزاء منها بواسطة عمود الالتواء. يتم تركيب مستشعر عزم الدوران (مستشعر عزم الدوران) على عمود الالتواء. عندما تدور عجلة القيادة ، يتم لف عمود الالتواء ، والذي يتم تسجيله بواسطة مستشعر العزم. يتم تغذية البيانات الواردة من جهاز استشعار عزم الدوران ، وأجهزة استشعار السرعة وثوران العمود المرفقي إلى وحدة التحكم الإلكترونية ECU. وتحسب وحدة التحكم الإلكترونية ، بدورها ، بالفعل قوة التعويض اللازمة وتعطي أمرًا للمحرك الكهربائي للمضخم.
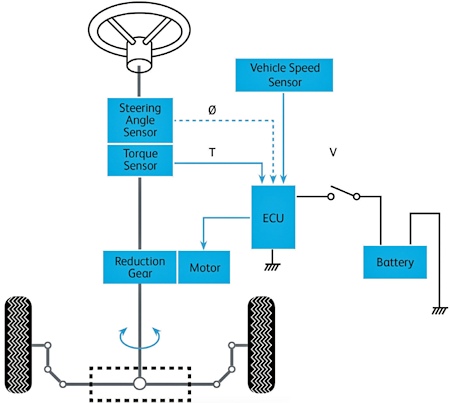 التين. 3. رسم تخطيطي لنظام توجيه الطاقة الكهربائيةالفيديو: يقوم نظام LKA بتوجيه سيارة باستخدام نظام EPS.
التين. 3. رسم تخطيطي لنظام توجيه الطاقة الكهربائيةالفيديو: يقوم نظام LKA بتوجيه سيارة باستخدام نظام EPS.دواسة الغاز الإلكترونية
إن دواسة الوقود هي آلية لضبط كمية خليط الوقود التي ستقع في المحرك. كلما زاد الخليط ، زادت سرعة السيارة.
دواسة الغاز الإلكترونية هي نظام يتضمن تشغيل العديد من المكونات الإلكترونية. تدخل الإشارة حول موضع الدواسة ، عند الضغط عليه ، إلى وحدة التحكم في المحرك ECM (وحدة التحكم في المحرك). تقوم وحدة التحكم الإلكترونية ، بناءً على هذه الإشارة ، بحساب الكمية المطلوبة من الوقود التي يجب توفيرها للمحرك. اعتمادًا على كمية الوقود المطلوبة ، تقوم وحدة التحكم في المحرك بضبط زاوية فتح دواسة الوقود.
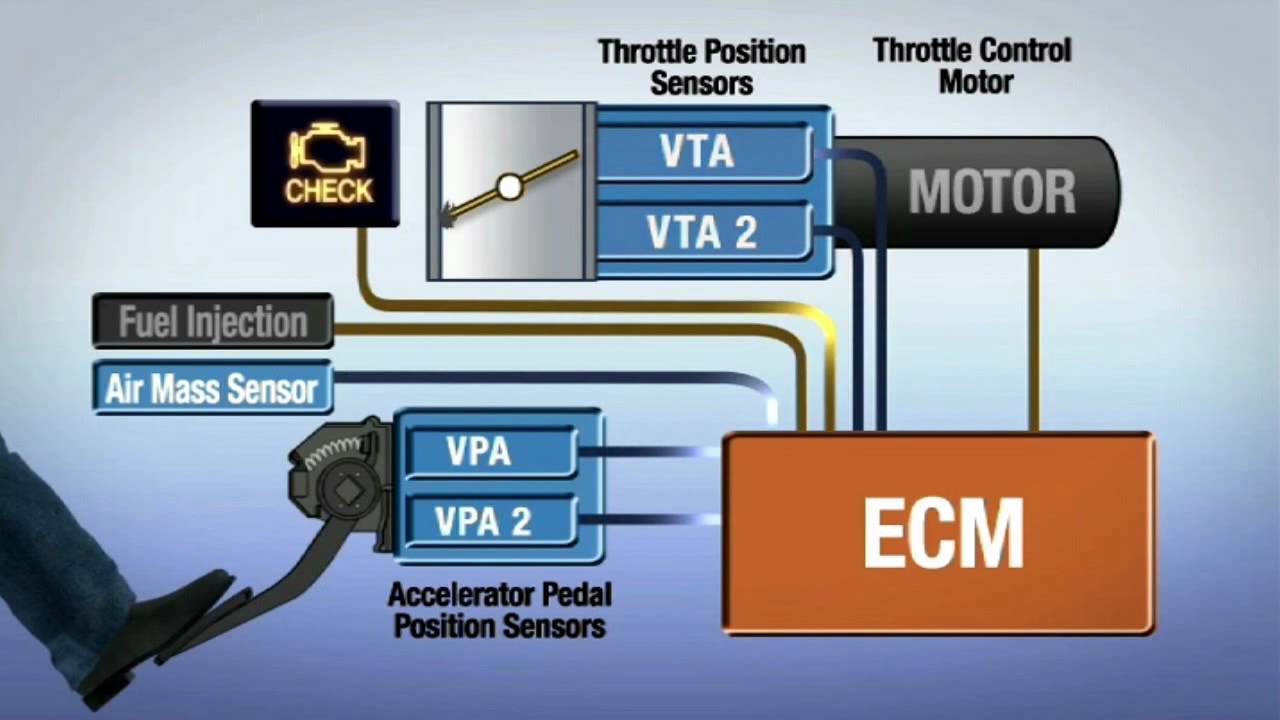 التين. 4. نظام دواسة الغاز الإلكترونية.الفيديو: يتم استخدام دواسة الوقود الإلكترونية لتشغيل نظام التحكم في التطواف.
التين. 4. نظام دواسة الغاز الإلكترونية.الفيديو: يتم استخدام دواسة الوقود الإلكترونية لتشغيل نظام التحكم في التطواف.أنظمة مساعدة السائق الإلكترونية
اشترينا سيارة مجهزة بمجموعة متنوعة من الوحدات الرقمية وأنظمة مساعدة السائق (ADAS). في مشروعنا نستخدم LKA و ACC و PCS.
LKA (Lane Keep Assist) هو نظام للاحتفاظ بالشريط يتكون من كاميرا أمامية ووحدة حوسبة. تحافظ LKA على السيارة في المسار عندما يصرف السائق ، على سبيل المثال. تستقبل الخوارزميات الموجودة في وحدة الحوسبة البيانات من الكاميرا وتقوم ، بناءً عليها ، باتخاذ قرار بشأن حالة السيارة على الطريق. يستطيع النظام أن يفهم أن السيارة تتحرك بشكل لا يمكن السيطرة عليه في اتجاه اليمين أو اليسار. في مثل هذه الحالات ، تصدر صوت تنبيه لجذب انتباه السائق. عند عبور الممر ، سيقوم النظام نفسه بضبط زاوية دوران العجلات بحيث تظل السيارة في المسار. يجب ألا يتدخل النظام إلا إذا أدرك أن المناورة بين الممرات لم يكن سببها السائق.
ACC (نظام التحكم التكيفي في التطواف) - نظام تحكم متكيف مع التطواف يتيح لك ضبط السرعة المطلوبة. السيارة نفسها تتسارع وتبطئ للحفاظ على السرعة المطلوبة ، في حين يمكن للسائق إزالة قدمه من دواسات الوقود والفرامل. هذا الوضع مناسب للاستخدام عند القيادة على الطرق السريعة والطرق السريعة. إن نظام التحكم التكيفي في التطواف قادر على رؤية العوائق أمام السيارة ويبطئ لتجنب الاصطدام بها. إذا تحركت مركبة أخرى بسرعة منخفضة إلى الأمام ، فستتباطأ وتتابع ACC. عندما يتم اكتشاف كائن ثابت ، سوف يتباطأ ACC حتى يتوقف. للكشف عن الأشياء الموجودة أمام السيارة ، يستخدم مثل هذا النظام رادارًا ذا نطاق طوله ملليمتر ملليمتر. عادة ، تعمل هذه الرادارات بتردد 24-72 غيغاهرتز وتكون قادرة على رؤية الأشياء بثقة على مسافة 300 متر. عادة ما يتم تثبيت الرادار خلف الشارة الأمامية على الشبكة.
PCS (نظام ما قبل الاصطدام) - نظام تجنب الاصطدام. تم تصميم النظام لمنع الاصطدام بسيارة تتحرك في المقدمة. عندما يكون التصادم لا مفر منه ، يقلل النظام من تلف التصادم. كما يستخدم الرادار لتقدير المسافة إلى الكائن والكاميرا الأمامية للتعرف عليها. تتنبأ واجهة PCS باحتمالية حدوث تصادم استنادًا إلى سرعة السيارة والمسافة إلى الجسم وسرعته. عادةً ما يحتوي النظام على مرحلتين من التشغيل. المرحلة الأولى - أصوات النظام وعرضه على لوحة القيادة تُعلم السائق بالخطر. المرحلة الثانية - يتم تنشيط فرامل الطوارئ باستخدام نظام ABS ، ويتم تنشيط أدوات رفع حزام الأمان.
الجزء العملي
عجلة القيادة
أول شيء أراد فريقنا فعله هو تعلم التوجيه. يمكن التحكم في عجلة القيادة في السيارة من خلال نظامين: مساعد وقوف السيارات IPAS (مساعد ذكي بارك) و LKA.
يسمح لك IPAS بضبط زاوية التوجيه بالدرجات مباشرةً. نظرًا لأن سيارتنا لا تحتوي على هذا النظام ، فمن المستحيل التحقق من القيادة وإتقانها بهذه الطريقة.
لذلك ، درسنا الدوائر الكهربائية للسيارة وأدركنا أن حافلات CAN يمكن أن تكون مفيدة. وصلنا محلل حافلة CAN. يحتوي السجل على ملف لسجلات الرسائل في الحافلة بالتسلسل الزمني. كانت مهمتنا هي العثور على فرق توجيه قوة EPS (توجيه القوة الكهربائية). أخذنا سجل عجلة القيادة من جانب إلى آخر ، في السجل ، يمكن أن نجد قراءات زاوية الدوران وسرعة دوران عجلة القيادة. فيما يلي مثال على تغيير البيانات في حافلة CAN. يتم تمييز البيانات التي تهمنا بعلامة.
 360 درجة توجيه اليسار
360 درجة توجيه اليسار أدر عجلة القيادة 270 درجة إلى اليمين
أدر عجلة القيادة 270 درجة إلى اليمينفي الخطوة التالية ، درسنا نظام الاحتفاظ بالمسارات. للقيام بذلك ، ذهبنا إلى أحد الشوارع الهادئة وقمنا بتسجيل سجلات التبادل بين وحدة احتجاز الممرات ووحدة دعم القيادة (وحدة دعم القيادة). باستخدام محلل ناقل CAN ، تمكنا من حساب الرسائل من نظام LKA. يوضح الشكل 6 أمر التحكم EPS.
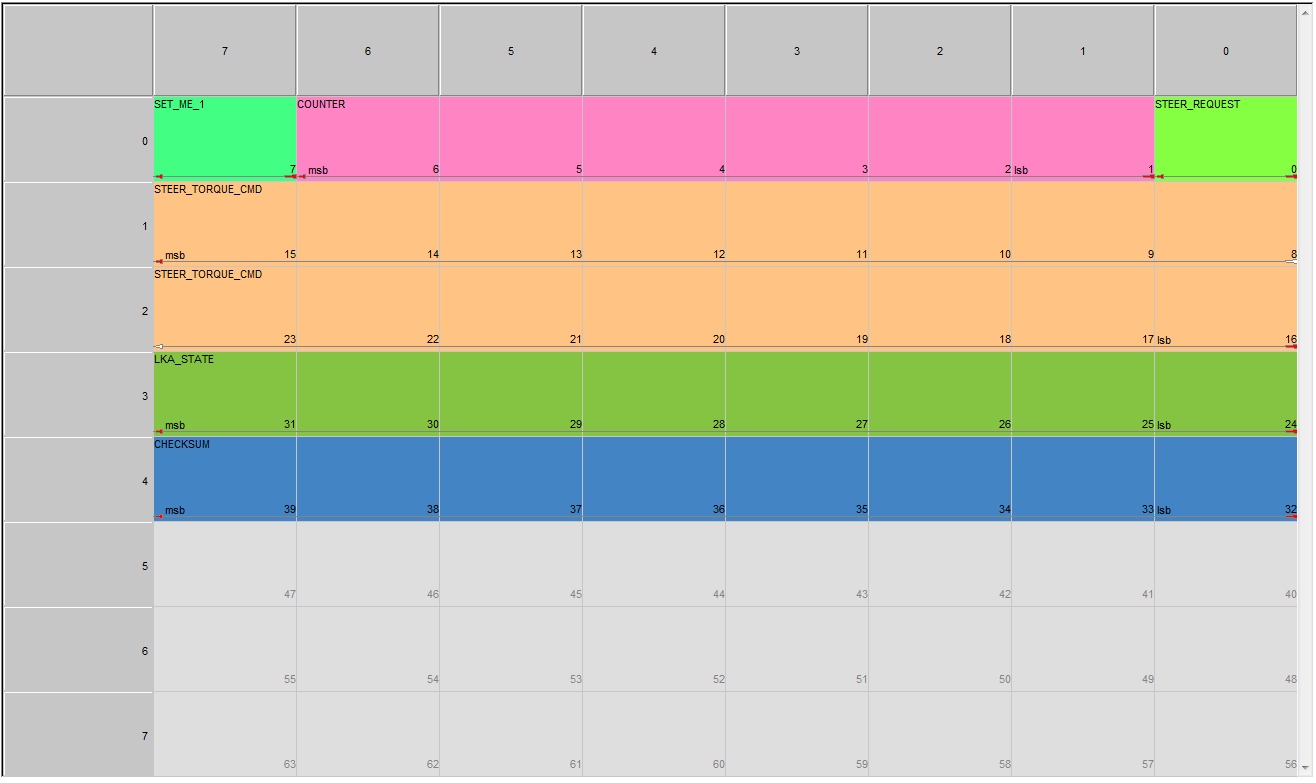 التين. 5. قيادة التوجيه باستخدام نظام LKA
التين. 5. قيادة التوجيه باستخدام نظام LKAيتحكم LKA في عجلة القيادة عن طريق تحديد قيمة عزم الدوران على العمود (STEER_TORQUE_CMD) من عجلة القيادة. يتم قبول الأمر بواسطة وحدة EPS. تحتوي كل رسالة على قيمة عداد (COUNTER) في الرأس ، والتي تزداد مع كل إرسال. يحتوي الحقل LKA_STATE على معلومات حالة LKA. لالتقاط التحكم ، يجب عليك تعيين STEER_REQUEST بت.
تتم حماية الرسائل المسؤولة عن تشغيل أنظمة السيارات المهمة عن طريق المجموع الاختباري (CHECKSUM) لتقليل مخاطر الإنذارات الخاطئة. ستتجاهل السيارة مثل هذا الأمر إذا كانت الرسالة تحتوي على قيمة اختبارية أو قيمة مضادة غير صحيحة. إنها حماية تصنعها الشركة المصنعة ضد تداخل نظام الطرف الثالث والتداخل في خط الاتصال.
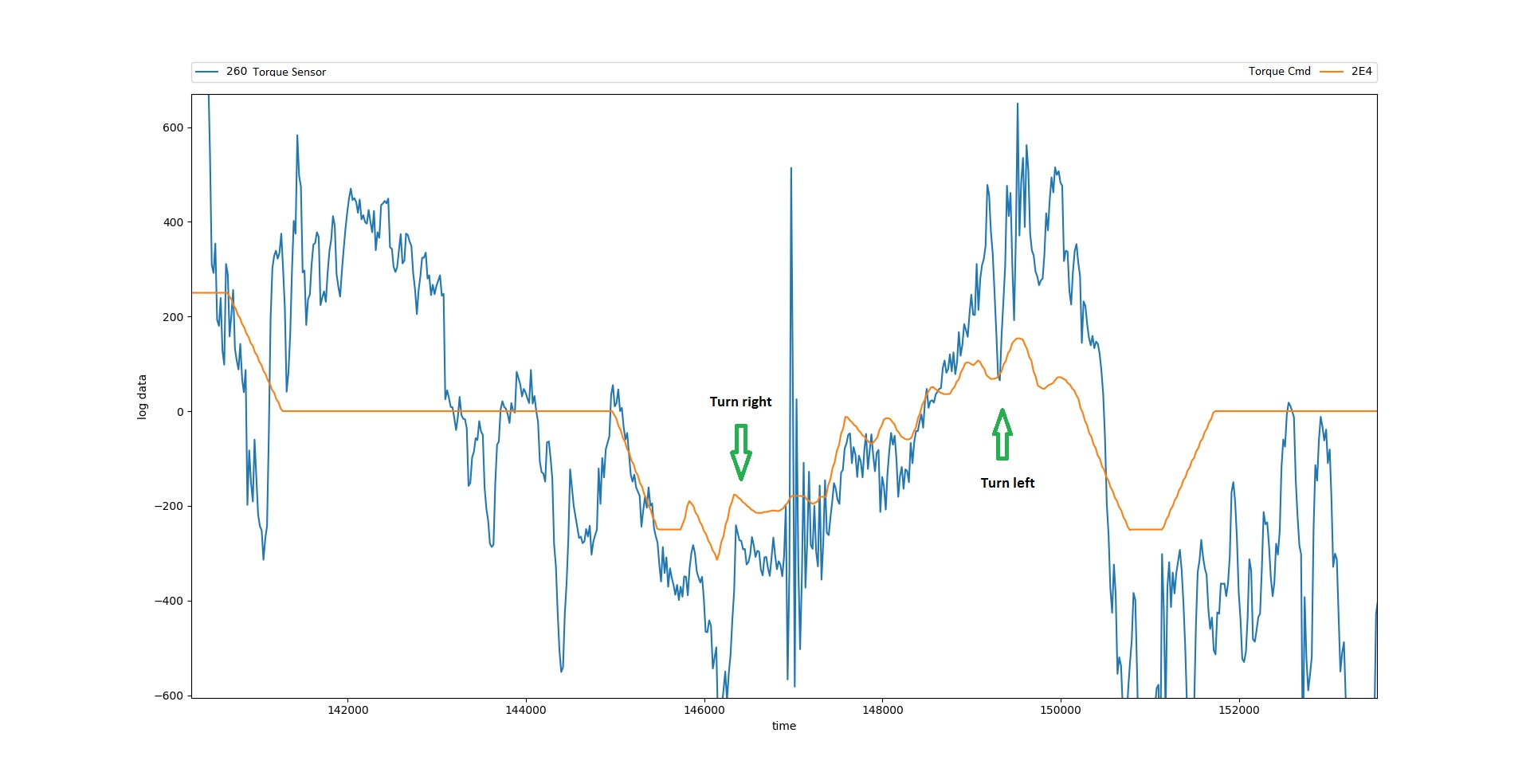
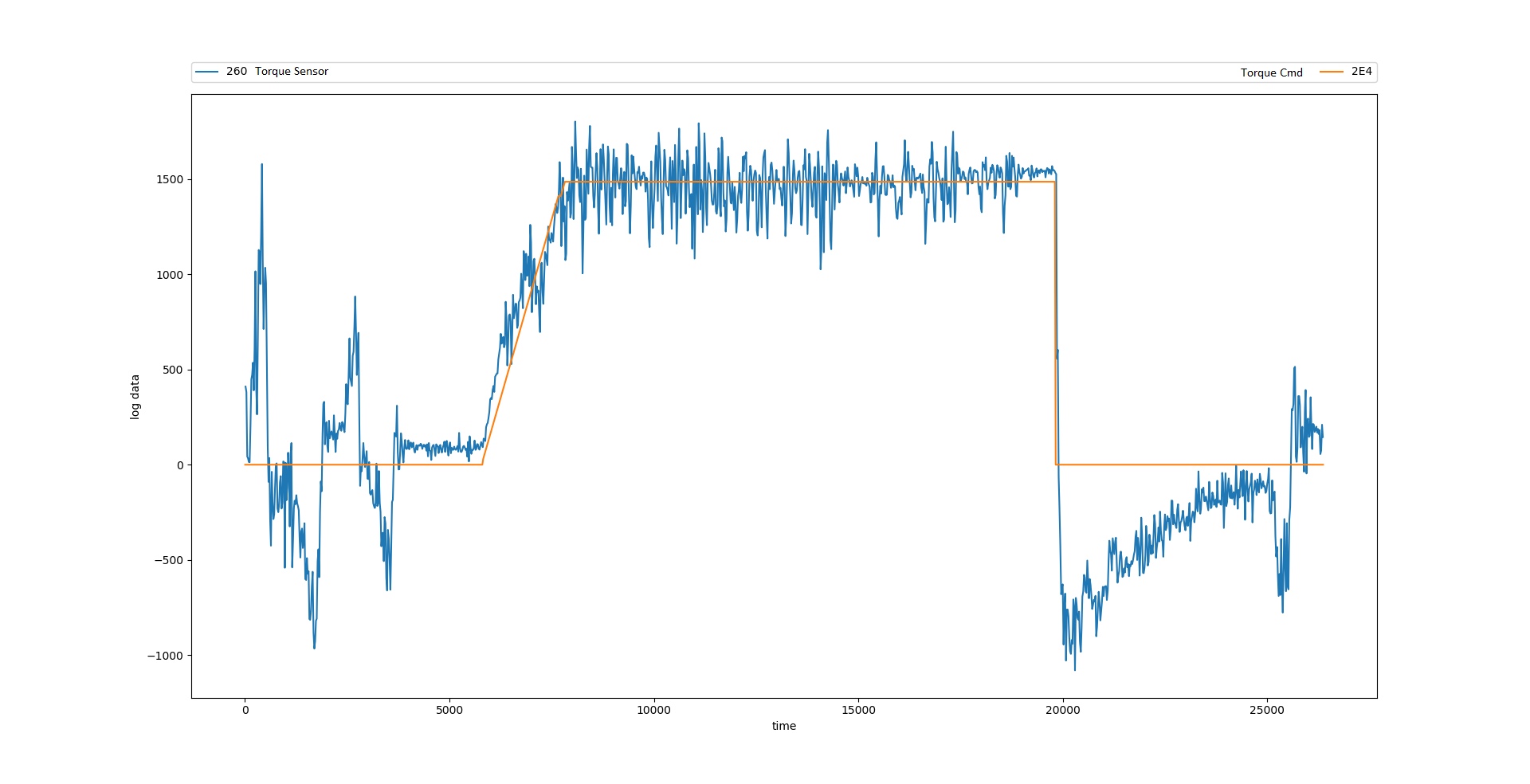
يوضح الرسم البياني (الشكل 6.) مخطط التشغيل LKA. مستشعر عزم الدوران - القيمة من مستشعر عزم الدوران على عمود الالتواء. Torque Cmd هو فريق من LKA لتوجيهه. توضح الصورة كيف يتم توجيه LKA لعقد السيارة في الممر. عند عبور الصفر ، يتغير اتجاه دوران عجلة القيادة. أي إشارة سلبية تشير إلى تحول إلى اليمين ، وقيمة إيجابية إلى اليسار. الإبقاء على الأمر عند الصفر يشير إلى عدم وجود سيطرة من قبل LKA. مع تدخل برنامج التشغيل ، يتوقف النظام عن إصدار التحكم. تكتشف LKA تدخل السائق باستخدام مستشعر عزم الدوران الثاني على العمود من جانب عجلة القيادة.
 التين. 6. الجدول الزمني لنظام LKA
التين. 6. الجدول الزمني لنظام LKAكان علينا أن نتحقق من عمل الفريق التوجيهي. باستخدام وحدة StarLine Sigma 10 ، قمنا بإعداد البرنامج الثابت لاختبار التحكم. يجب أن يصدر StarLine Sigma 10 أوامر إلى عجلة القيادة لقلب عجلة القيادة إلى اليسار أو اليمين. في ذلك الوقت ، لم يكن لدينا واجهة رسومية للتحكم في الوحدة ، لذلك كان علينا استخدام الوسائل القياسية للسيارة. لقد وجدنا حالة وضع ذراع التحكم في التطواف في حافلة CAN وبرمجتها على الوحدة النمطية بحيث أدى الموضع العلوي للرافعة إلى تحول عجلة القيادة إلى اليمين ، الموضع السفلي - إلى الانعطاف إلى اليسار (الشكل 7).
 التين. 7. أول محاولات لتوجيه
التين. 7. أول محاولات لتوجيهيظهر الفيديو أن التحكم يتم في أقسام قصيرة. يحدث هذا لعدة أسباب.
السبب الأول هو عدم وجود ردود فعل. إذا تجاوز التعارض بين إشارة Torque Cmd ومستشعر Torque قيمة معينة ، فإن النظام يتوقف تلقائيًا عن قبول الأوامر (الشكل 8). قمنا بتعيين الخوارزمية لضبط أمر الإخراج (Torque CMD) حسب قيمة عزم الدوران على العمود (Torque Sensor).
 التين. 8. إشارة التناقض يؤدي إلى خطأ في النظام
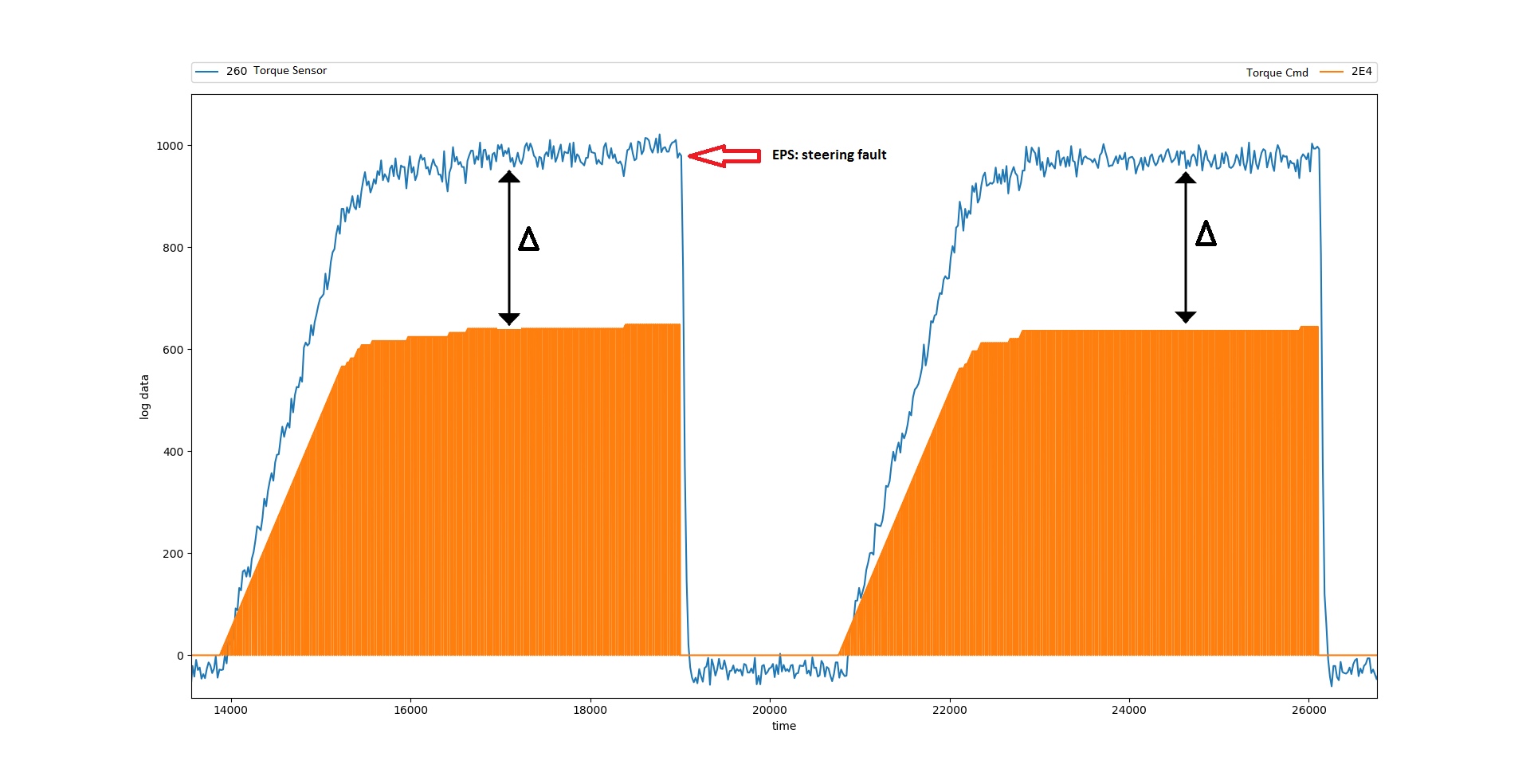
التين. 8. إشارة التناقض يؤدي إلى خطأ في النظاميرتبط التقييد التالي بنظام الأمن المضمن في EPS. نظام EPS لا يسمح لفرق LKA بالتوجيه على نطاق واسع. وهو منطقي جدا ، لأنه عند القيادة على الطريق ، فإن المناورة المفاجئة ليست آمنة. وبالتالي ، عندما يتم تجاوز قيمة الحد الأقصى لعزم الدوران على العمود ، فإن نظام LKA يولد خطأ وينطفئ (الشكل 9).
 التين. 9. تجاوز القيمة الحدية للتحكم في عزم الدوران على العمود
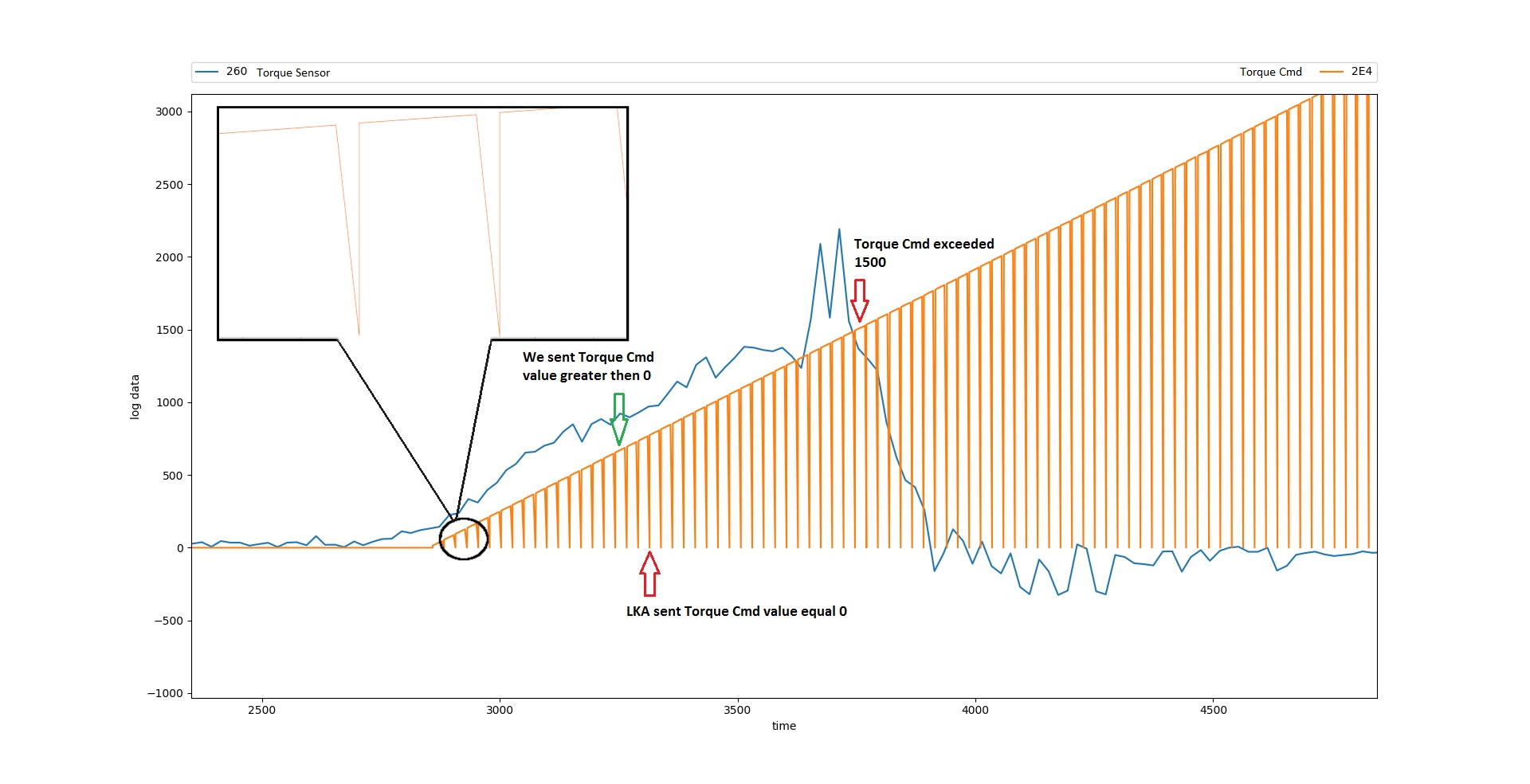
التين. 9. تجاوز القيمة الحدية للتحكم في عزم الدوران على العمودبغض النظر عما إذا كان نظام LKA قد تم تنشيطه أم لا ، فإن الرسائل التي تحتوي على أوامر منه موجودة باستمرار في الحافلة. نطلب من وحدة EPS تدوير العجلات بقوة محددة إلى اليسار أو اليمين. وفي الوقت نفسه ، تقاطع LKA حزمنا مع رسائل "فارغة". بعد فريقنا بقيمة اللحظة ، يأتي المعيار صفر (الشكل 10).
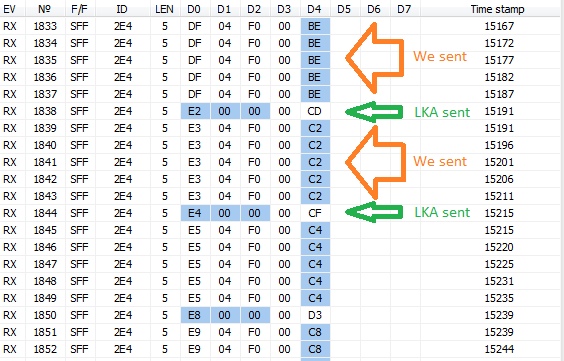 التين. 10. الرسائل العادية تأتي بقيم لحظة الصفر وتقاطع سيطرتنا
التين. 10. الرسائل العادية تأتي بقيم لحظة الصفر وتقاطع سيطرتنابعد ذلك ، باستخدام وحدة StarLine Sigma 10 ، تمكنا من تصفية كل حركة المرور من LKA وحظر الرسائل بمعرف 2E4 عندما نحتاج إليها. أدى ذلك إلى حل المشكلة ، وتمكنا من الحصول على تحكم توجيه سلس (الشكل 11).
 التين. 11. السلس تعديل عجلة القيادة دون أخطاء
التين. 11. السلس تعديل عجلة القيادة دون أخطاءإدارة الغاز
يتحكم نظام ACC Adaptive Cruise Control في برنامج التسارع والكبح عبر حافلة CAN. تستقبل وحدة التحكم في المحرك ECU أوامر DSU ، إذا كنت بحاجة إلى تسريع ، فإنها تنشط دواسة الغاز الإلكترونية. يستخدم الكبح التجديدي لفرامل السيارة. في هذه الحالة ، يتم استخدام أمر واحد للكبح والتسارع ، فقط القيم تختلف.
يظهر الشكل 12 أمر التحكم في التسارع أو التباطؤ ، وهو يتألف من قيمة التسارع ACCEL_CMD ، وزوج من وحدات البت العلوية ، واختباري المجموع الاختباري. بالنسبة إلى تسريع السيارة ، يكون ACCEL_CMD موجبًا ؛ وبالنسبة للتباطؤ ، سلبي. يتم تعيين التسارع في النطاق من 0 إلى 3 م / ث ^ 2 ، ويشبه التباطؤ ، ولكن بعلامة ناقص. لإرسال البيانات إلى الحافلة ، من الضروري إعادة حساب التسارع أو التباطؤ المطلوبين باستخدام معامل 0.001. على سبيل المثال ، لتسريع 1 م / ث ^ 2 ، ACCEL_CMD = 1000 (0x03E8).
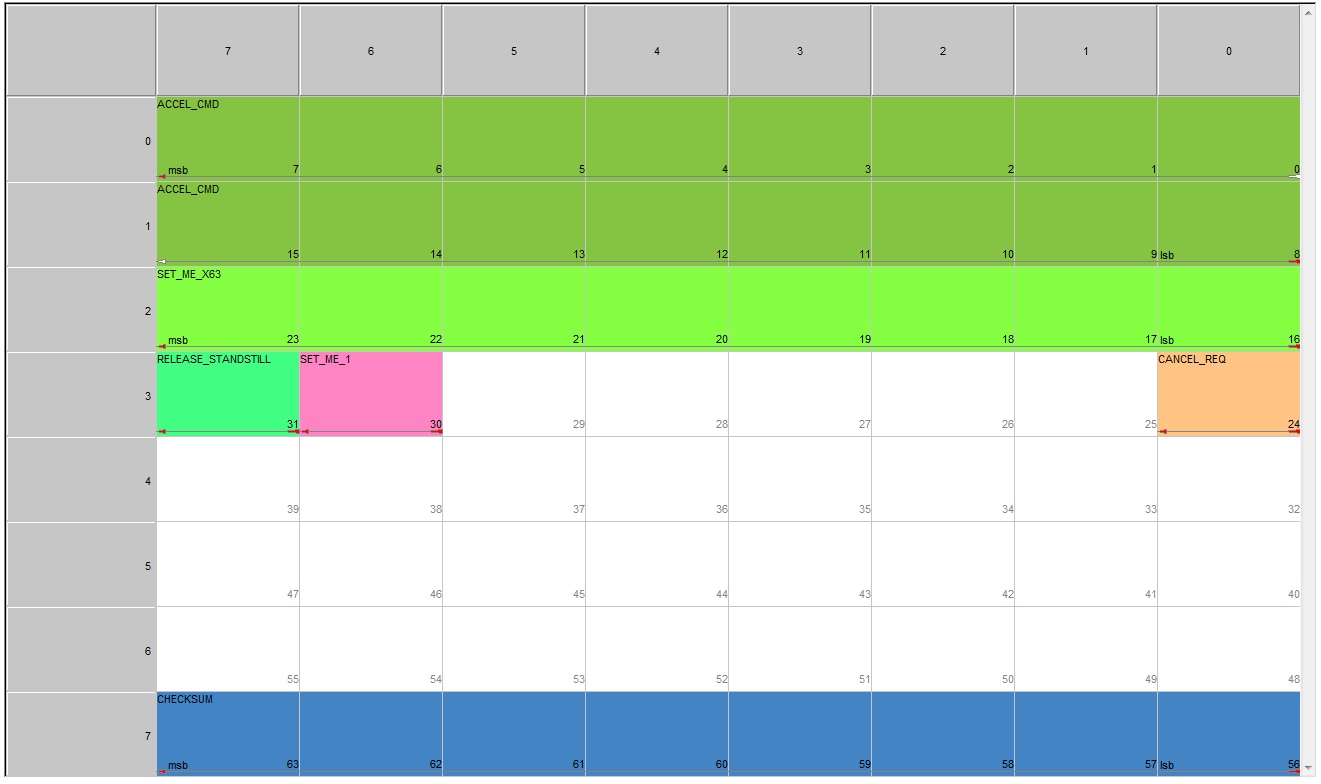 التين. 12. القيادة للسيطرة على تسارع / تباطؤ السيارة
التين. 12. القيادة للسيطرة على تسارع / تباطؤ السيارةأزلنا السجلات من نظام ACC القياسي وقمنا بتحليل الفرق. مقارنة مع وصفنا للفرق وبدأ الاختبار.
 التين. 13. ACC تسريع / التحكم في التباطؤ التكيف سجل كروز (أبرز مع علامة)
التين. 13. ACC تسريع / التحكم في التباطؤ التكيف سجل كروز (أبرز مع علامة)لم يكن ذلك بدون صعوبات. سافرنا على الطريق مع حركة المرور المزدحمة لاختبار فريق التسريع. تعمل أوامر التحكم في التسارع أو التباطؤ في السيارة فقط عند تنشيط نظام التحكم في التطواف ، ولا يكفي تنشيطه باستخدام الزر. من الضروري العثور على السيارة تتحرك في المقدمة وتشغيل الوضع التالي.
 التين. 14. يحدث تنشيط التحكم في التطواف عند وجود مركبة أخرى في المقدمة
التين. 14. يحدث تنشيط التحكم في التطواف عند وجود مركبة أخرى في المقدمةباستخدام وحدة StarLine Sigma 10 ، نرسل أمر تسريع ، وتبدأ السيارة في زيادة السرعة. في هذه المرحلة ، قمنا بتوصيل الواجهة الرسومية للتحكم في وحدة StarLine Sigma 10. الآن ، نحن نتحكم في عجلة القيادة والتسارع والكبح باستخدام الأزرار الموجودة في التطبيق.
عملت الفرق حتى فقدوا السيارة أمامهم. تم إيقاف تشغيل نظام التحكم في التطواف ، وبالتالي توقفت أوامر التسارع عن العمل.
بدأنا في دراسة إمكانية استخدام فرق دون مراقبة الرحلات النشطة. اضطررت إلى قضاء الكثير من الوقت في تحليل البيانات الموجودة في حافلة CAN لفهم كيفية تهيئة الظروف لكي تعمل الفرق. نحن مهتمون ، أولاً وقبل كل شيء ، الذي يحظر تنفيذ أوامر ACC للتسريع أو التباطؤ. اضطررت لدراسة أي معرفات تأتي من DSU ، LKA ، والرادار والكاميرا ، والنخيل من البيانات المزيفة من أجهزة الاستشعار المختلفة.
جاء القرار بعد 3 أسابيع. بحلول ذلك الوقت ، كانت لدينا فكرة عن كيفية تفاعل كتل السيارة ، وإجراء دراسة لحركة الرسائل ومجموعات محددة من الرسائل المرسلة من كل كتلة. تعد وحدة دعم القيادة ECU (DSU) مسؤولة عن التحكم في التطواف التكيفي ACC. تصدر DSU أوامر لتسريع وتقليل سرعة السيارة ، وهذه الوحدة هي التي تستقبل البيانات من رادار مدى الملليمتر. يخبر الرادار DSU عن المسافة بين الآلة التي يتحرك بها الجسم ، وبأي سرعة نسبية ويحدد موقعه الأفقي (إلى اليسار أو اليمين أو الوسط).
كانت فكرتنا لاستبدال بيانات الرادار. أزلنا السجل الخاص باتباع السيارة ، وسحبنا بيانات الرادار منه في لحظة المتابعة. الآن ، بعد تشغيل التحكم في التطواف ، نرسل بيانات وهمية حول وجود سيارة في المقدمة. اتضح لخداع سيارتنا ، قائلا أن سيارة أخرى في الأمام يتحرك على مسافة محددة.
أ)

ب)
 التين. 15. تفعيل التطواف: أ) محاولة التنشيط دون استبدال بيانات الرادار ؛ ب) التنشيط عند استبدال البيانات من الرادار.
التين. 15. تفعيل التطواف: أ) محاولة التنشيط دون استبدال بيانات الرادار ؛ ب) التنشيط عند استبدال البيانات من الرادار.عندما نبدأ بعطلتنا ، تضاء أيقونة وجود السيارة الموجودة أمام لوحة القيادة. الآن يمكننا اختبار إدارتنا. نبدأ أمر التسريع ، وتبدأ السيارة في التسارع بسرعة.
كما تعلمنا بالفعل ، فإن أمر التسريع والتباطؤ هو أمر واحد.
لذلك ، فحصوا على الفور التباطؤ. ذهبنا بسرعة مع التحكم النشط بالسرعة ، وأطلقنا قيادة الكبح ، وتباطأت السيارة على الفور.ونتيجة لذلك ، اتضح الآن تسريع السيارة وإبطاءها تمامًا كما نحتاج.يتم تحقيق الهدف.ماذا نستخدم؟
لإنشاء طائرة بدون طيار ، من الضروري التحكم في الأنظمة المساعدة: إشارات الدوران ، وأضواء المكابح ، وأجهزة الإنذار ، والقرن ، وما إلى ذلك. ويمكن أيضًا التحكم في كل هذا عبر حافلة CAN.الأجهزة والبرامج
للعمل مع السيارة اليوم نستخدم مجموعة من المعدات المختلفة:- يتيح لك Marathon Bus Analyzer توصيل وقراءة البيانات من حافلتين في وقت واحد. يحتوي موقع الشركة المصنعة للمحلل على برنامج مجاني لتحليل السجل. لكننا نستخدم البرامج المكتوبة في شركتنا للاستخدام الداخلي.
- StarLine 10 . CAN LIN . C, . CAN-. , ID .
- Toyota/Lexus. : , -, , .
واليوم ، يجري العمل النشط لتطوير سيارة بدون طيار ، في المستقبل القريب ، وتنفيذ نظام الكبح في حالات الطوارئ قبل العوائق ، وتحويل مسار السيارة وإعادة هيكلتها وفقًا لحالة المرور وتعليمات السائق.تعتبر مركبة StarLine غير المأهولة منصة مفتوحة للجمع بين أفضل العقول الهندسية في روسيا والعالم بهدف إنشاء تقنيات قيادة غير مأهولة متقدمة تجعل مستقبلنا آمنًا ومريحًا.مشروع جيتلاب