مرحبا يا هبر. في هذه المقالة ، سأتحدث عن روبوت زحف بسيط يتم التحكم فيه مصنوع من محرك أقراص مضغوطة قديم. أريد أن أنقل فكرة فقط ، وليس تصميمًا معينًا ، حتى يتمكن الجميع من صنع شيء مشابه للتفاصيل المتاحة إذا رغبوا في ذلك. تحتوي المقالة على الكثير من الصور الخفيفة وثلاثة صور بلغ مجموعها 25 ميغابايت.
إذا أحب شخص ما مشاهدة المزيد من مقاطع الفيديو ،
فإليك مقطع فيديو حول هذا الروبوت .
يفكر العديد من المتحمسين للإلكترونيات حول ما يمكن القيام به من محركات الأقراص المضغوطة القديمة في عصرنا. التطبيق الأكثر شيوعًا هو النقش بالليزر من رأس الليزر لكاتب DVD وجدول إحداثي لحركتين من هذا الرأس. عادة ما تكون الأبواب الأوتوماتيكية مصنوعة من طاولة منزلقة للقرص (على سبيل المثال ، للقطط أو الهامستر). صنعت لعبتين من طاولة قابلة للسحب: "سيارة عديمة الفائدة" وروبوت زحف. لن أتحدث عن سيارة عديمة الفائدة ، لأنها بسيطة للغاية. من يهتم ، يمكنك مشاهدة
الفيديو عنها .
ومع ذلك ، فإن فكرة الروبوت الزحف هي أيضا بسيطة جدا. إذا لم يكن شخص ما على دراية بتصميم محرك الأقراص المضغوطة ،
يمكنك أن تقرأ عنه في ويكيبيديا .
سأبدأ مع الوصف النظري. يوضح الشكل أدناه محرك أقراص مضغوطة زحف على الجانب. لديه اثنين من العجلات الدوارة بحرية في الظهر ، ودعا "عجلات الدعم". يوجد أمامك "عجلة قيادة" بمحركها الخاص. يوجد أدناه دعمان قابلان للتمديد لرفع عجلة القيادة.
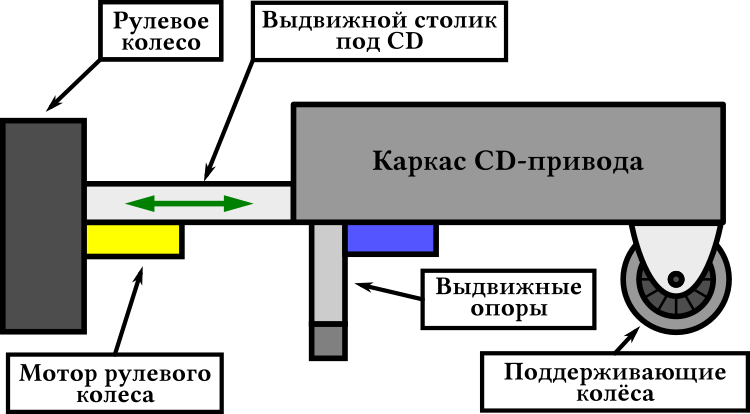
في الشكل التالي ، كانت الرؤية الأمامية غير مفهومة قليلاً.

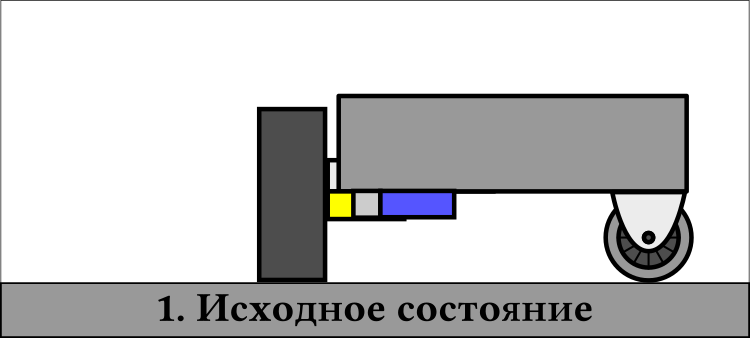
كيف هذا النظام تزحف هو مبين أيضا في الأرقام. لذلك ، هناك حالة أولية عندما يتم دفع الجدول المنزلق من القرص المضغوط والدعم. من هذا الموضع ، يبدأ الروبوت في التحرك للأمام والخلف ويقوم بدوره.
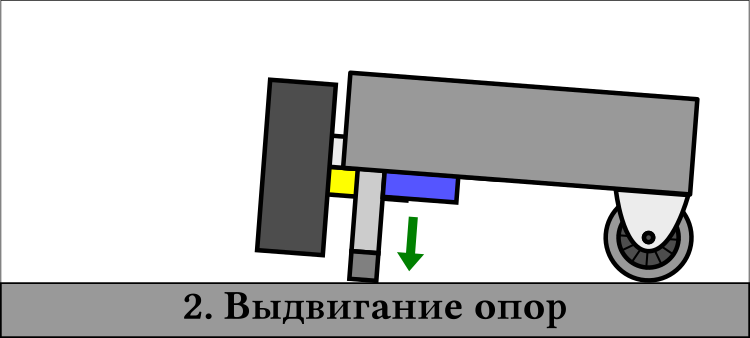
للمضي قدماً ، يتم تمديد الدعامات أولاً ، وبالتالي رفع عجلة القيادة.
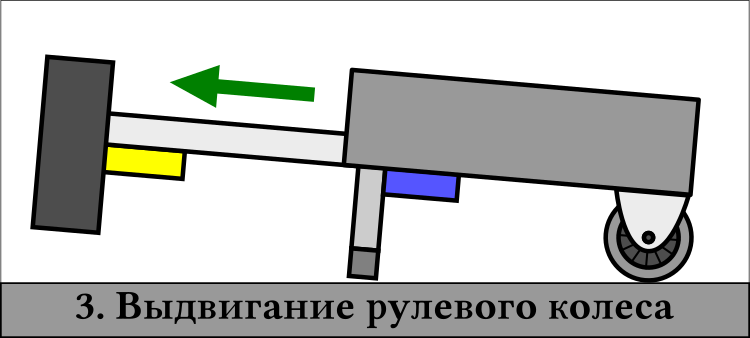
ثم يمتد الجدول CD جنبا إلى جنب مع عجلة القيادة.
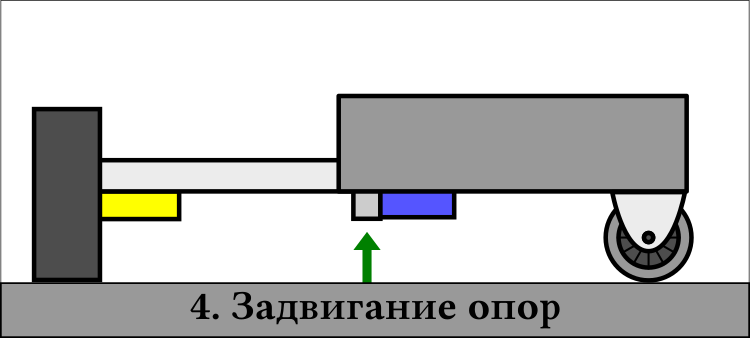
علاوة على ذلك ، تتراجع الدعامات وتخفض عجلة القيادة.
الآن يبقى العودة إلى حالته الأصلية عن طريق تحريك الطاولة للقرص المضغوط.
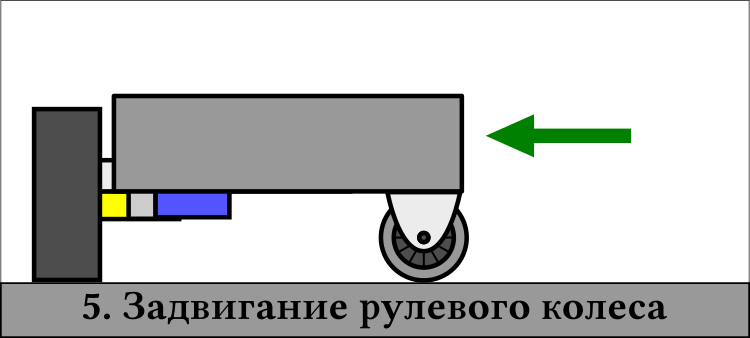
في هذه الحالة ، يتمسك عجلة القيادة بسطح الأرض ، وبالتالي يتم سحب الإطار بأكمله لمحرك الأقراص المضغوطة إلى عجلة القيادة. بعد ذلك ، تتكرر الدورة.
لتشغيل الروبوت في الحالة الأولية ، يتم تشغيل محرك عجلة القيادة ، بينما يبدأ النظام بأكمله في تدوير 360 درجة حول محور يقع في مكان ما بين العجلات الداعمة.
إذا فهمت كيف يعمل هذا الشيء ، فلن يكون من الصعب عليك أن تتخيل كيف يتم تنفيذ الحركة الخلفية.
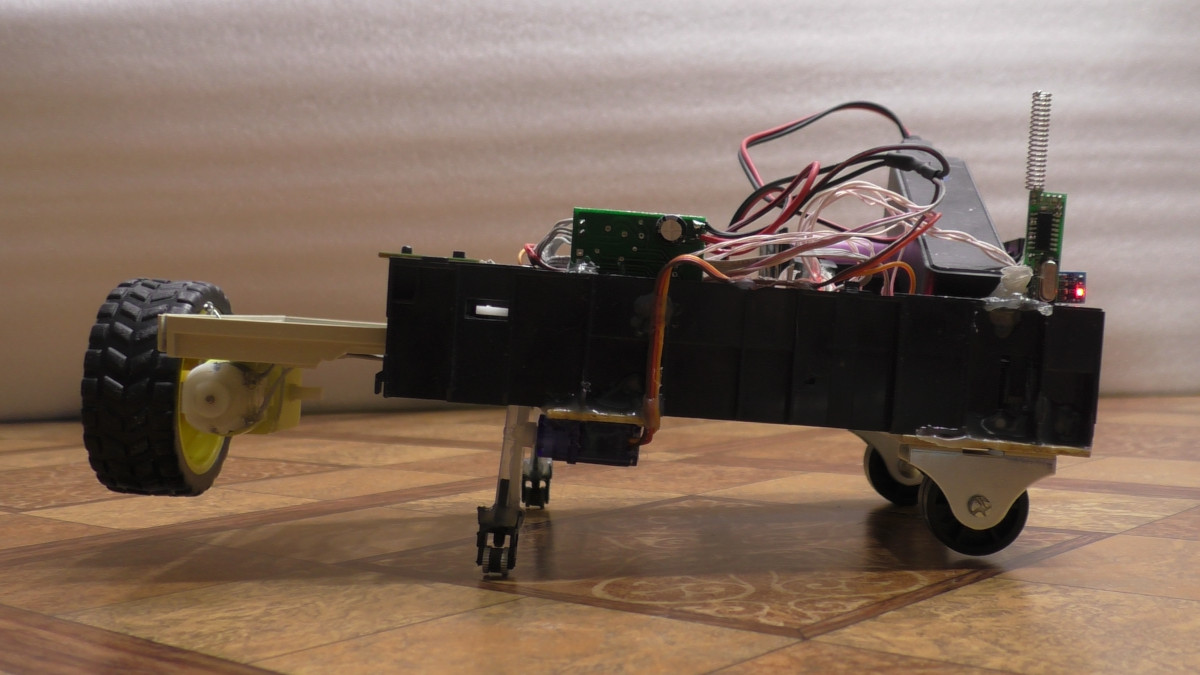
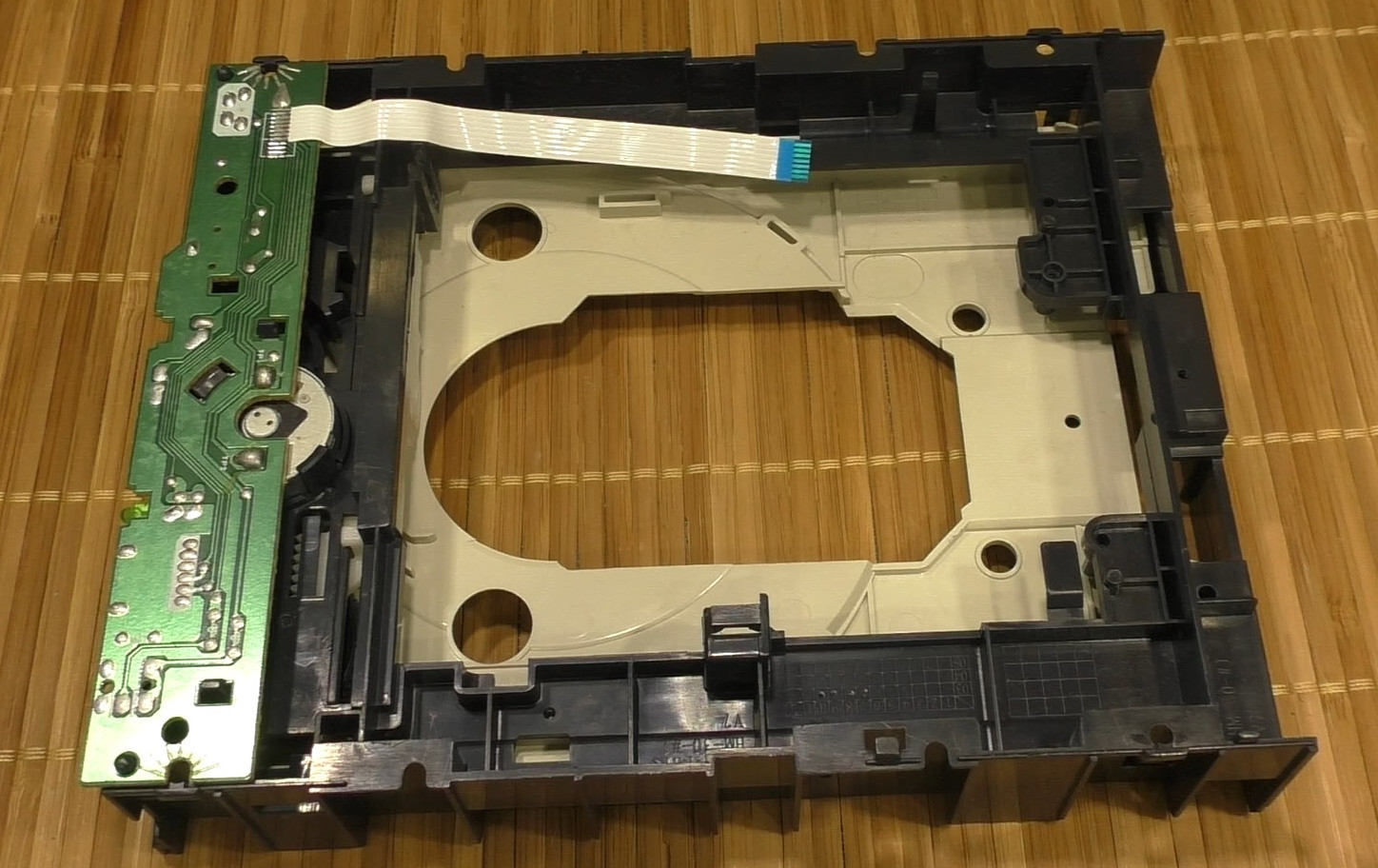
الآن قليلا عن تنفيذ بلدي. لن أخبر بالتفصيل ، لأن كل شيء تم بطريقة عشوائية ، لمجرد التحقق من قدرة الفكرة على العمل. لقد استخدمت محرك أقراص مضغوطة بسيطًا كقاعدة ، وأخرجت جميع البصريات بشريحة منه ، ولم يكن هناك سوى إطار بلاستيكي به طاولة قابلة للسحب ، ومحرك ومفاتيح نهاية زر للطاولة.
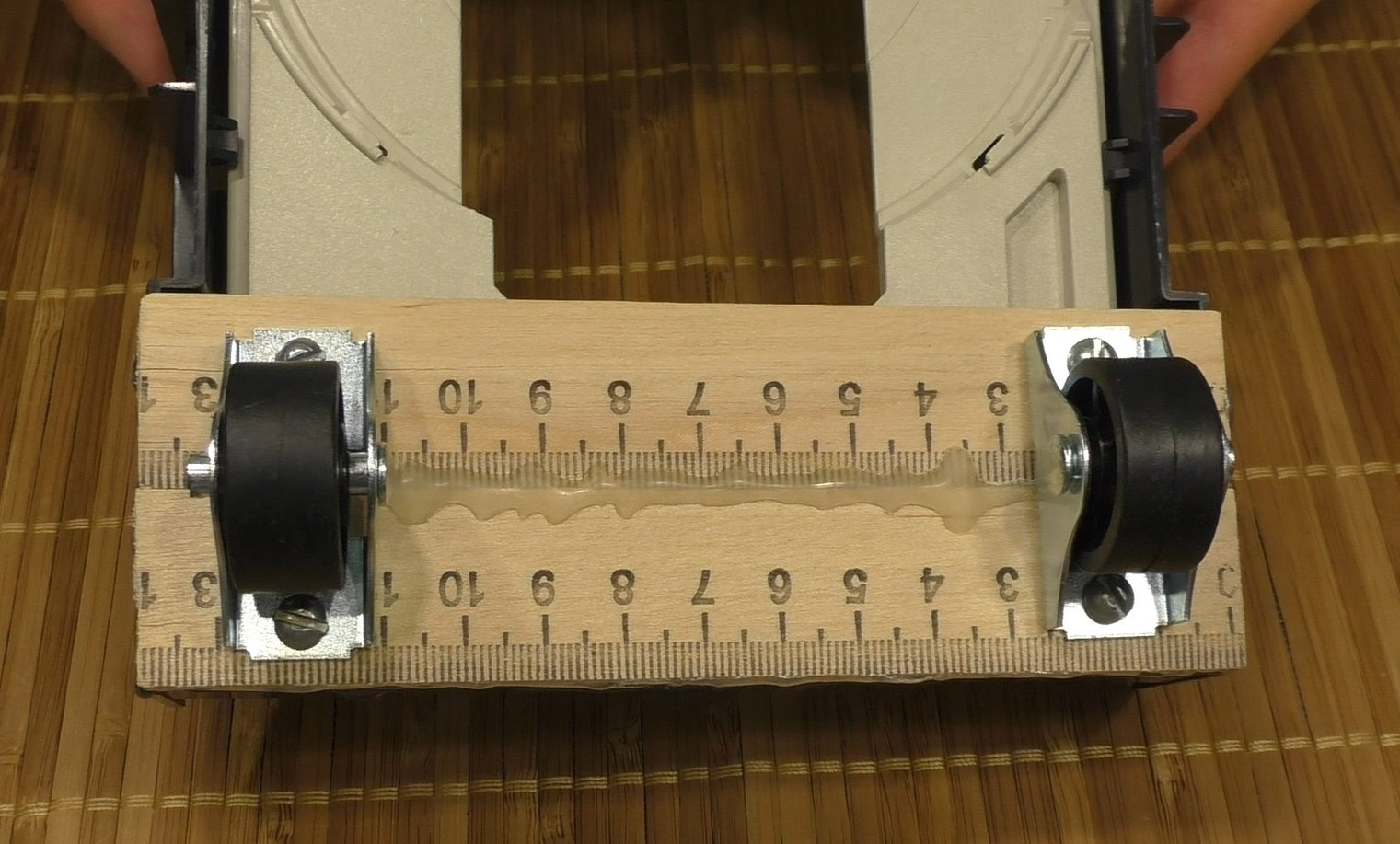
عجلات الأثاث المرفقة كعجلات دعم.
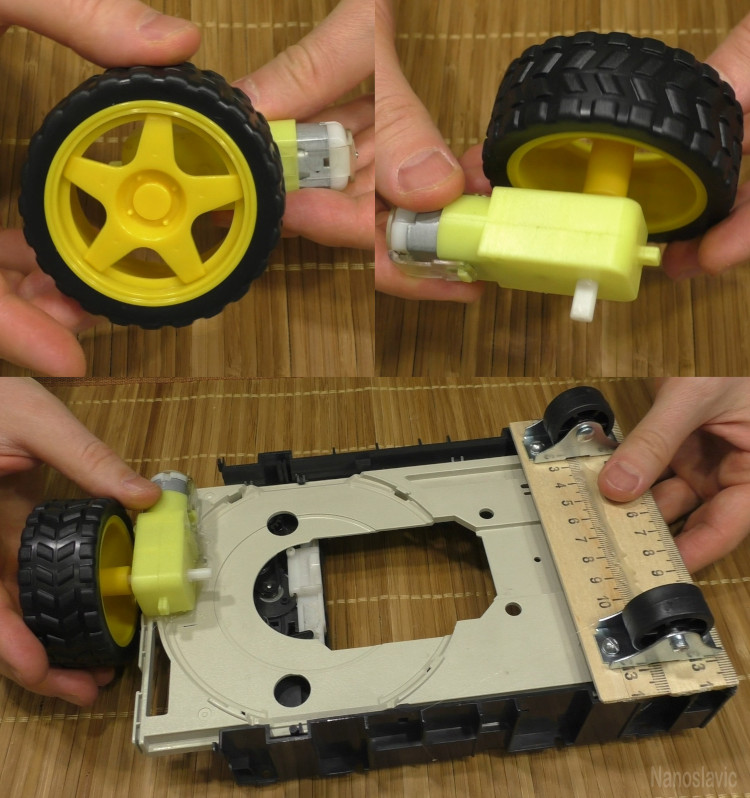
اشتريت عجلة القيادة بشكل منفصل في مكان ما على الإنترنت. لديه محرك وعلبة تروس بلاستيكية.
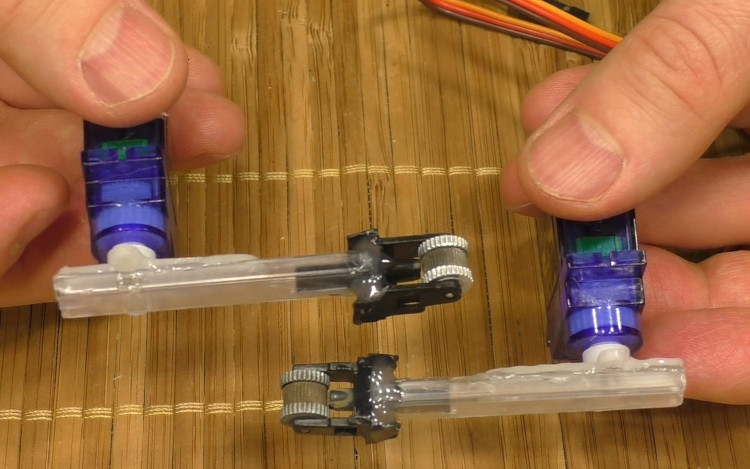
دعامات قابلة للسحب مصنوعة من الأنابيب البلاستيكية ، والتي تباع في رقائق بالجملة في الإسكان SO8. أرفقتهم كرسيًا من الولاعات ، بعد أن أزالتهم من الصوان وأبزعت منهم سابقًا ، بحيث يمكن تدوير الكرسي بحرية. لتمديد الدعم تستخدم اثنين من الماكينات الرخيصة. يتم تجميع كل شيء بشكل رئيسي على مادة لاصقة تذوب الساخنة.
تم تصنيع الإلكترونيات بما كان عليه ، لذا فهو ليس مثاليًا للغاية. للتحكم في محركات الطاولة CD وعجلة القيادة ، تم استخدام دائرة جسر مع الترانزستورات. هذا جعل من الممكن تغيير اتجاه الدوران. كما المنطق - نوعا من مجلس اردوينو. للسيطرة على الحركة ، أخذ فوب مفتاح ودائرة استجابة المتلقي على تردد 434 ميغاهيرتز.

لتشغيل المحركات ، قمت بتوصيل ثلاث بطاريات ليثيوم أيون في سلسلة دون أي حماية ، لذلك قمت بتشغيله بحذر ، والتحقق من شحنتها في بعض الأحيان. لتشغيل الجزء الرقمي والراديو ، استخدمت بنك طاقة رخيصًا صغيرًا يصدر 5 فولت.
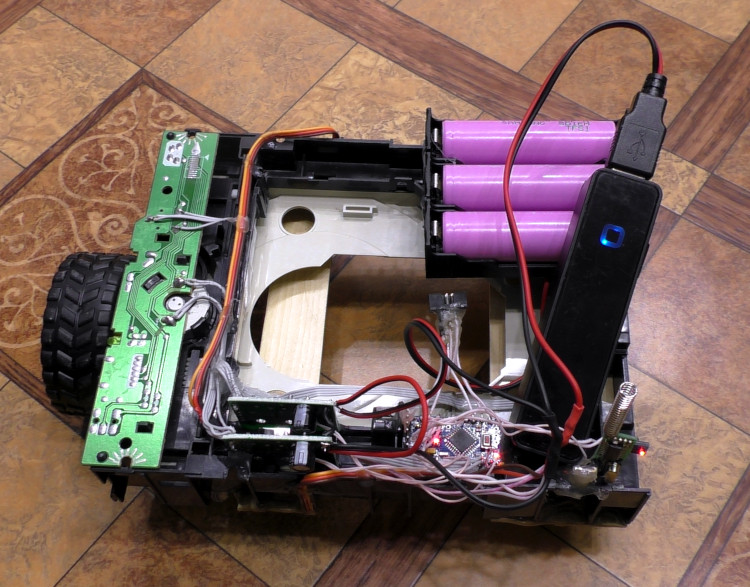
البطاريات في الخلف سهلة الاستخدام للغاية ، حيث تفوق عجلة القيادة إلى حد كبير عند الدفع للأمام.
يتحقق برنامج التحكم ، عند تشغيله ، من نقاط نهاية درج الأقراص المضغوطة ويعيد النظام إلى حالته الأصلية. للسيطرة تستخدم 4 أزرار. عندما تضغط على الزر "الأمام" ، تبدأ حركة الأمام. يحدث الإيقاف والعودة إلى الحالة الأولية للنظام عند الضغط على أي زر في جهاز التحكم عن بُعد. عند الضغط على زر "رجوع" ، فإنه يتحرك للخلف ، مع إيقاف عند الضغط على أي زر. يعمل الزران الأيمن والأيسر فقط في الحالة الأولية وفقط أثناء الضغط عليهما.
نتيجة لذلك ، اتضح أن الحركة الأمامية فقط تعمل بشكل طبيعي. عند التحرك للخلف ، يتحول مركز الثقل إلى حد كبير عند تمديد عجلة القيادة ، لذلك لا يمكن للرافعات رفعها بشكل طبيعي. تحتاج الماكينات أكثر قوة. نظرًا لأن النظام يعود دائمًا إلى حالته الأصلية ، فإن الحركة ممكنة فقط من خلال "الخطوات" المحددة بطول الجدول للقرص المضغوط ، ولكن هذا يعد قيودًا على البرامج.
وأخيرا ، بعض متحركة.
حركة أمامية ، منظر جانبي ، 6.8 ميجا بايت التحرك إلى الأمام ، عرض أعلى ، 7.8 ميغابايت تدوير ، عرض من أعلى ، 6.3 ميغابايت أعتقد أنه يمكن تبسيط النظام بالكامل عن طريق إنشاء لوحة تحكم على حلقة ، والتحكم في المحركات باستخدام الأزرار والمفاتيح. للتحكم في الماكينات ، يمكنك إنشاء مولد بسيط على أجهزة ضبط الوقت 555. يمكن إنتاج الطاقة من البطاريات العادية ووضعها في جهاز التحكم عن بُعد ، مما يقلل من وزن الروبوت. سيسمح لك هذا التحكم عن بعد بالتحكم في الروبوت يدويًا بالكامل.
شكرا لكم جميعا على اهتمامكم والحرف جيدة لك.