عند تحليل مشكلة أوليمبية واحدة ، سوف نمضي على طول الممرات المتعرجة لتوليد المتاهات ومرورها ، وسنرى أيضًا في لغة جوليا بساطة تنفيذ حدود الخوارزميات على الشفرة الزائفة الخاصة بها.
مهمة
المتاهة عبارة عن مربع متقلب من 10 إلى 10 ، وفي بعض الخلايا توجد عوائق ، وهناك مخرج في خلية واحدة. الروبوت في مثل هذه المتاهة ويمكنه تنفيذ 4 أوامر: تحريك خلية واحدة إلى أسفل أو أعلى أو اليمين أو اليسار. إذا حاول الروبوت تجاوز حدود المتاهة أو الذهاب إلى القفص بعائق ، فسيظل في مكانه. إذا دخل الروبوت إلى المخرج ، فإنه يخرج من المتاهة ويتجاهل الأوامر الأخرى. اكتب برنامجًا للروبوت ، ينفذ الروبوت الذي في أي حال يخرج منه ، بغض النظر عن الخلية التي كان موجودًا فيها في البداية. يجب أن يتكون البرنامج من أكثر من 1000 فريق.

لا يوجد دخول. تحتاج إلى كتابة برنامج لشرط واحد محدد
المتاهة.
إصدار المتاهة التي يمكنك نسخها. 0 - خلية حرة ، 1 - عقبة ، x -
مخرج
0011010011 0100001000 0110x00000 0010000100 0000111000 0000100100 0000010010 0100101010 0011001010 1000011000
سطر واحد يتكون من الأحرف U و D و R و L بطول لا يزيد عن 1000
تدريب
أولئك الذين لم يعملوا مع الرسومات في جوليا يحتاجون إلى تنزيل الحزم
using Pkg Pkg.add("Plots") Pkg.add("Colors") Pkg.add("Images") Pkg.build("Images")
من الأنسب العمل في Jupyter ، حيث سيتم عرض الصور مباشرة أثناء العمل. هنا يمكنك العثور على التثبيت ، بالإضافة إلى مقدمة ومهام للمبتدئين.
في حالة مهمتنا هناك نسخة من المتاهة للنسخ
S0 = "0011010011 0100001000 0110x00000 0010000100 0000111000 0000100100 0000010010 0100101010 0011001010 1000011000"
لرسم متاهة ، تحتاج إلى جعل مصفوفة. نظرًا لأننا لا نريد وضع مسافات يدويًا ، فسنعمل مع السطر:
S1 = prod(s-> s*' ', '['*S0*']')
استبدال الحرف المربك x برقم وتحليل السلسلة ، نحصل على مصفوفة عدد صحيح تحدد متاهاتنا. بعد ذلك ، من أجل راحة أكبر ، قم بتغييرها إلى أصفار ، والأصفار إلى أخرى ، وأرفق المتاهة بجدار:
S2 = replace(S1, 'x'=>'9') M0 = S2 |> Meta.parse |> eval m,n = size(M0) M1 = replace(M0, 1=>0, 0=>1) M = zeros(Int64,m+2,n+2) for i in 2:m+1, j in 2:n+1 M[i,j] = M1[i-1,j-1] end M
في المصفوفة
length(M) 144
الخلايا ومنهم
sum(M)-9 70
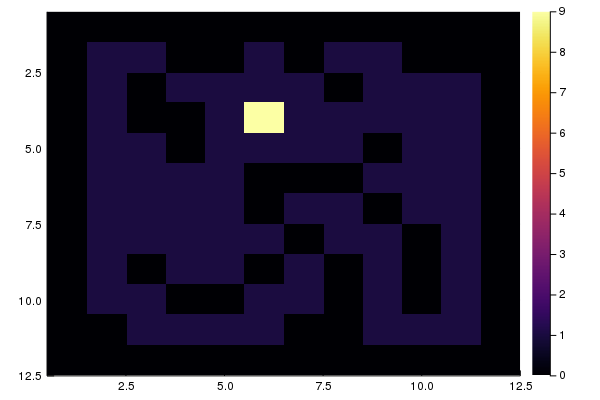
التي يمكنك المشي ، وهذا هو - مواقف الانطلاق المحتملة. يمكنك عرض النتيجة عن طريق إنشاء رسم بياني ثنائي الأبعاد
using Plots heatmap(M, yaxis = :flip)
التحقق من الحل
بادئ ذي بدء ، تحتاج إلى وضع إجراءات تحقق من صحة الحل المقترح. اضبط النوع المركب Point لاستخدام مصطلحات النقاط والإحداثيات:
mutable struct Point x::Int64
والآن تحتاج إلى معرفة كيفية ترجمة سلسلة من الأوامر المفهومة للروبوت إلى كود.
الفكرة بسيطة للغاية: هناك إحداثي بدء ، خط يأتي بخوارزمية توضح كيفية المشي. نأخذ حرفًا واحدًا وننظر إلى أي من الخلايا المجاورة للخطوة. إلى الإحداثيات الحالية نضيف القيمة المخزنة في هذه الخلية. أي إذا كان هناك صفر (جدار) ، فإننا لم نتحرك في أي مكان ، وإلا فقد اتخذنا خطوة صغيرة في الاتجاه المطلوب.
باستخدام قوة metaprogramming ، يمكنك استبدال تسلسل الاتجاهات الواردة برمز ضخم وموحد وتنفيذها
S = "RRLDUURULDDRDDRRRUUU" S1 = replace(S , "R"=>"c.y+=M[cx, c.y+1];") S1 = replace(S1, "L"=>"cy-=M[cx, cy-1];") S1 = replace(S1, "U"=>"c.x+=M[c.x+1, cy];") S1 = replace(S1, "D"=>"cx-=M[cx-1, cy];")
لكن هذه الطريقة بها عدد من الإزعاج ، لذلك ، سوف نستخدم العوامل الشرطية الكلاسيكية. بالمناسبة ، فإن الإشارة إلى المخرج بالرقم 9 هي خدعة صغيرة: من أجل عدم التحقق من كل خلية ، وما إذا كان هو المخرج ، نبدأ الحركة بإضافة القيمة المخزنة في خلية معينة. عندما ينتقل الروبوت إلى المخرج ، تتم إضافة عدد كبير عن عمد إلى إحداثيته ، بحيث ينتقل الروبوت إلى ما وراء حدود المصفوفة ، والتي يمكن اكتشافها كخطأ باستخدام الكتلة:
try
وبالتالي ، فإننا نقوم بتنفيذ وظيفة تتحقق مما إذا كان الروبوت يصل إلى المخرج بدءًا من النقطة c تنفيذ الأوامر من السلسلة str :
function isexit(str, c) scatter!([cy],[cx]) try for s in str if s == 'R' c.y+=M[cx, c.y+1]; elseif s == 'L' cy-=M[cx, cy-1]; elseif s == 'U' c.x+=M[c.x+1, cy]; elseif s == 'D' cx-=M[cx-1, cy]; else println("Error! Use only R, L, U, D") end end catch return true end return false end
دعنا نجمع وظيفة ستعمل على تكرار جميع المواقف المبدئية
function test(Str) k = 0 for i in 2:m+1, j in 2:n+1 if M[i,j] == 1 c = Point(i, j) a = isexit(S,c) if a k +=1
تحقق من الأوامر:
S = "RRRLDUUURRRUUURRRRLLLRRUULDDDDRRRRDDDRRRUUU" heatmap(M, yaxis = :flip) test(S)
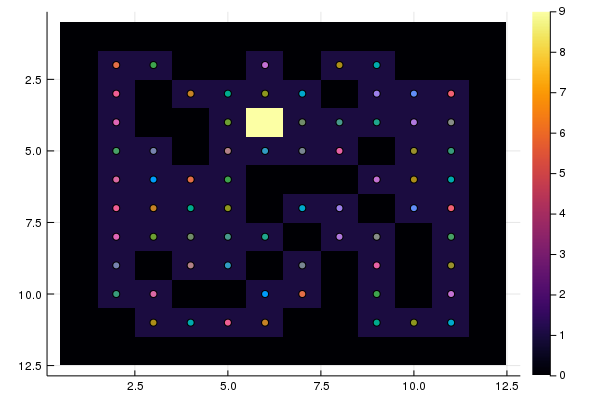
تم اختبار جميع نقاط البداية ، وأدت فقط 10 إلى الخروج. من الضروري بناء طرق من كل نقطة إلى الخروج.
قبل الغطس في جيل ومراحل المتاهات ، سنوفر نتائجنا. سنستخدم حزمة Images.jl التي توفر العديد من الاحتمالات في مجال معالجة الصور ( مثال جيد ). واحدة من أدواته الداعمة هي حزمة Colors.jl ، التي توسع قدرة جوليا على العمل مع الألوان.
using Images clrs(x) = x==9 ? RGB(1.,0.5,0) : RGB(x,x,x) maze = clrs.(M)

البحث العمق
نفذت الفكرة من مقال عن هبر .
الفكرة بسيطة: إنشاء شبكة من الجدران
M = 10 N = 10 A = [ i&j&1 for i in 0:N, j in 0:M ]
ثم ، من خلال حلقات ، ونحن اختراق الطريق والفروع. نحدد دالة تعثر على المناطق غير المرخصة المجاورة (سنقوم بتعيينها ، على سبيل المثال ، بواسطة الشيطان) وإرجاع واحد من هذه الجيران (إذا لم يكن هناك جيران غير مرغوب فيهم ، فستُرجع نقطة العلم):
function neighbours2(A,p, n, m) nbrs = [Point(px, p.y+2),
سوف نكسر الجدران مثل هذا:
function breakwall(A, newp,oldp)
خوارزمية
- جعل الخلية الأولية الحالية ووضع علامة عليه كما زار.
- بينما هناك خلايا غير مرخصة
1. إذا كانت الخلية الحالية "جيران" غير مرغوب فيهم
1. ادفع الخلية الحالية إلى المكدس
2. حدد خلية عشوائية من المجاورة
3. إزالة الجدار بين الخلية الحالية والخيار المحدد
4. جعل الخلية المحددة الحالية ووضع علامة عليه كما زار.
2. خلاف ذلك ، إذا كان المكدس غير فارغ
1. اسحب القفص من المكدس
2. جعله الحالي
3. خلاف ذلك
1. حدد خلية عشوائية غير مرخصة ، وجعلها الحالية ووضع علامة عليها كما زار.
رمز البرنامج function amazeng(n, m) M = [ 2(i&j&1) for i in 0:n, j in 0:m ]; p = Point(2,2)
lbrnt = amazeng(36, 48)
خوارزمية البحث عن مسار التراجع:
- جعل الخلية الأولية الحالية ووضع علامة عليه كما زار.
- حتى يتم العثور على حل
1. إذا كانت الخلية الحالية "جيران" غير مرغوب فيهم
1. ادفع الخلية الحالية إلى المكدس
2. حدد خلية عشوائية من المجاورة
3. جعل الخلية المحددة الحالية ووضع علامة عليه كما زار.
2. خلاف ذلك ، إذا كان المكدس غير فارغ
1. اسحب القفص من المكدس
2. جعله الحالي
3. خلاف ذلك ، لا توجد وسيلة للخروج.
نحن نبحث عن الجيران على عكس ذلك وداخل دائرة نصف قطرها خلية واحدة ، وليس من خلال واحدة:
function neighbours1(A, p, n, m) nbrs = [Point(px, p.y+1),
تحديد خوارزمية لتمرير المتاهة مع رسم الطريق ومحاولات غير ناجحة
function amazeng(img, start, exit) M = Float64.(channelview(img)) n, m = size(M) p = start M[exit.x,exit.y] = 1 lifo = [] push!(lifo, p) while px != exit.x || py != exit.y M[px,py] = 0.4 np = neighbours1(M, p, n, m) if np.x == np.y == 0 M[px,py] = 0.75 p = pop!(lifo)
كما لاحظ البعض ، تسمى الوظيفة أيضًا ، مثل تلك التي تنشئها الخوارزميات (جدولة متعددة). عندما تسميها برقمين ، ستعمل على تحديد طريقة إنشاء المتاهة ، ولكن إذا قمت بالاتصال بها عن طريق تحديد الصورة ونقطتين (إحداثيات المدخلات والمخرجات) كحجة ، ثم في الإخراج نحصل على صورة مع تمرير المتاهة
img0 = load("D:/dat/maze111.png") amazeng(img0)
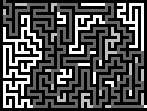
لنجرب متاهاتنا:
img0 = load("D:/dat/maze12x12.png") n, m = size(img0) amazeng(img0, Point(11,9), Point(4,6) )

حتى إذا قمت بتعديل الوظيفة بحيث يتم تذكر المسار ، فإن الخوارزمية لا تزال غير فعالة بسبب المساحات المفتوحة. لكن متاهات يخرج كبيرة.
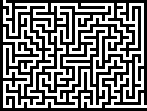
خوارزمية عشوائية بريم
بمجرد أن تبدأ في رسم المتاهات ، فلن تتوقف. لنقم بإجراء خوارزمية أخرى مثيرة للاهتمام:
- ابدأ بشبكة مليئة بالجدران.
- حدد خلية ، ووضع علامة عليها كجزء من المتاهة. إضافة جدران الخلايا إلى قائمة الجدار.
- في حين أن هناك جدران في القائمة:
- حدد جدار عشوائي من القائمة. إذا تمت زيارة واحدة فقط من الخليتين التي يشاركها الجدار ، عندئذٍ:
- اجعل الجدار ممرا ووضع علامة على الخلية غير المرئية كجزء من المتاهة.
- إضافة جدران الخلايا المجاورة إلى قائمة الجدار.
- أزل الجدار من القائمة.
قانون neighbors(p::Point) = [Point(px, p.y+1),
primaze = prim(19,19); Gray.(primaze)

اتضح أكثر براعة وليس أقل رهيبة ، وخاصة عملية التجميع.
والآن ننفذ الخوارزمية الأكثر شيوعًا للعثور على أقصر الطرق:
الطريقة أ *
- يتم إنشاء 2 قوائم قمة - في انتظار واستعراضها بالفعل. تتم إضافة نقطة البداية إلى النقاط المعلقة ، وقائمة المراجعة التي تمت مراجعتها فارغة حتى الآن.
- لكل نقطة تحسب H - المسافة التقريبية من النقطة إلى الهدف.
- من قائمة النقاط المراد النظر فيها ، النقطة مع أصغرها H . دعها X .
- إذا X - الهدف ، ثم وجدنا الطريق.
- نحمل X من القائمة المعلقة إلى قائمة المراجعة بالفعل.
- لكل نقطة من النقاط المجاورة ل X (تشير إلى هذه النقطة المجاورة Y ) ، قم بما يلي:
- إذا Y بالفعل في المراجعة - تخطي ذلك.
- إذا Y ليس بعد في قائمة الانتظار - إضافته هناك.
- إذا كانت قائمة النقاط المراد دراستها فارغة ، لكننا لم نصل إلى الهدف ، فهذا يعني أن المسار غير موجود.
للبدء ، دعنا نعرّف "نقطة" الفصل التي ستعرف مدى بعدها عن الهدف:
mutable struct Point_h x::Int64
الآن نحدد عملية المقارنة للهيكل ، طريقة لتأسيس وجود عنصر في صفيف ، وكذلك وظيفة إزالة عنصر ، إيجاد المسافة بين النقاط وإدراج الجيران:
مدسوس بعيدا import Base: in, == ==(a::Point_h, b::Point_h) = ax==bx && ay==by function in(p::Point_h, Arr::Array{Point_h,1}) for a in Arr if a == p return true end end return false end function splicemin!(Arr)
كما هو الحال دائما ، يمكن توضيح مشغلي غامضة باستخدام الأمر ? على سبيل المثال ?argmin ?splice ?argmin
وفي الواقع ، فإن الطريقة أ * نفسها
قانون function astar(M, start, final)
نقوم بتحميل الصورة مع المتاهة وتقديمها في شكل مصفوفة:
img0 = load("D:/dat/maze0.png") mazematrix = Float64.(channelview(img0))
ونحن نبني طريقًا للخروج من نقطة تعسفية:
s = Point_h(11,9)

البحث من جميع المواقف يشبه هذا:

يرى أن الوكيل PRET يميل دائمًا إلى جانب المخرج وغالبًا ما يتحول إلى طريق مسدود ، مما يؤدي إلى خطوات غير ضرورية ، ويتم تذكر المسار بالكامل. يتم تجنب ذلك عن طريق إصدار أكثر تعقيدًا قليلاً من خوارزمية A *.
- يتم إنشاء 2 قوائم قمة - في انتظار واستعراضها بالفعل. تتم إضافة نقطة البداية إلى النقاط المعلقة ، وقائمة المراجعة التي تمت مراجعتها فارغة حتى الآن.
- لكل نقطة تحسب F=G+H . G - المسافة من البداية إلى النقطة ، H - المسافة التقريبية من النقطة إلى الهدف. تخزن كل نقطة أيضًا رابطًا للنقطة التي جاءت منها.
- من قائمة النقاط المراد النظر فيها ، النقطة مع أصغرها F . دعها X .
- إذا X - الهدف ، ثم وجدنا الطريق.
- نحمل X من القائمة المعلقة إلى قائمة المراجعة بالفعل.
- لكل نقطة من النقاط المجاورة ل X (تشير إلى هذه النقطة المجاورة Y ) ، قم بما يلي:
- إذا Y بالفعل في المراجعة - تخطي ذلك.
- إذا Y ليس بعد في قائمة الانتظار - قم بإضافته إلى هناك ، مع تذكر الرابط X وبعد حسابها Y.G (هذا هو X.G + المسافة من X إلى Y ) و Y.H .
- ولكن، إذا Y في قائمة للنظر فيها - تحقق مما إذا X.G + المسافة من X إلى Y<Y.G لذلك وصلنا إلى هذه النقطة Y طريقة أقصر ، استبدال Y.G في X.G + المسافة من X إلى Y ، والنقطة التي أتوا منها Y في X .
- إذا كانت قائمة النقاط المراد دراستها فارغة ، لكننا لم نصل إلى الهدف ، فهذا يعني أن المسار غير موجود.
ولكن حتى مع الخطوات غير الضرورية ، فإن خيارنا يقع ضمن قيود المهمة ، لذا فإن تعديل البرامج سيكون واجبك.
حتى نهاية الأولمبياد ، لم يتبق شيء ، لكن ما زلنا بحاجة لمعرفة كيفية ترجمة نتائج خوارزمياتنا إلى أوامر من النموذج "RRLUUDL..."
وبعد كل هذه الأمور من خلال متاهات ، يمكننا أن نفترض أن الحل أبسط بكثير. في الواقع ، هناك خيار بسيط يطرح على الفور ، ولكني أردت حقًا صنع أشياء جميلة .
إذا وضعنا فناننا في منطقة مفتوحة وشرعنا في السير بشكل عشوائي ، فسوف يتردد بالقرب من مركز البداية. ولكن مع إدخال الجدران ، ستبدأ بعض الاتجاهات في التلاشي ، وستصبح درجات الحرية أقل ، وبنفس بيانات الإدخال ، يتحرك العامل مسافة أكبر.
في ما يلي نسختنا من فحص الفرق للتأكد من ملاءمتها لإنقاذ روبوت من متاهة:
قانون M = [ 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 0 0 1 0 1 1 0 0 0 0 1 0 1 1 1 1 0 1 1 1 0 0 1 0 0 1 9 1 1 1 1 1 0 0 1 1 0 1 1 1 1 0 1 1 0 0 1 1 1 1 0 0 0 1 1 1 0 0 1 1 1 1 0 1 1 0 1 1 0 0 1 1 1 1 1 0 1 1 0 1 0 0 1 0 1 1 0 1 0 1 0 1 0 0 1 1 0 0 1 1 0 1 0 1 0 0 0 1 1 1 1 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0] mutable struct Point
الآن يكفي إنشاء خطوط عشوائية حتى تحصل على خطوط مناسبة لجميع المواضع التي تبدأ:
using Random S = randstring("RLUD",200) "RDRRRDLRLUULURUDUUDLLLLLULLUDRRURDLDLULLRLUUUDURUUUULRUDUURUUDLRLLULRLUDRRLRRULLDULRRRRULRLLDULRLDRUDURDRUUDUUDDDDDLURRRRDRDURRRDDLLDUURRRLDRUDLRLLRDDRLRRRDDLLLRUURDRLURDLLUULLLLUURLLULUDULDDLDLLRLDUD" test(S) 41 test completed from 70
بالإضافة إلى ذلك ، كان من الممكن عدم عناء الاختبار. كان يكفي لقراءة المهمة وإنشاء سلسلة عشوائية بأقصى شرط مسموح به:
for i in 1:20 S = randstring("RLUD",1000) test(S) end 70 test completed from 70 70 test completed from 70 70 test completed from 70 70 test completed from 70 55 test completed from 70
وهذا هو ، مع احتمال 70 ٪ ، فإن الخط اجتياز الاختبارات.
هذا كل شيء. أتمنى للقارئ نجاحًا عشوائيًا والصبر والحدس لحلول واضحة.
للفضوليين - روابط لتعميق الموضوع: