
بدأ مكعب روبوت صغير الحجم يطير لاسلكيًا "Bumble" من مشروع Astrobee في إجراء اختبارات طيران على متن محطة الفضاء الدولية.
2019 هو عام الروبوتات على محطة الفضاء الدولية. FEDOR لم تصل بعد ، ولكن بالفعل الاختبارات القتالية للروبوتات لمشروع Astrobee قد بدأت بالفعل.

يوجد روبوتان بالفعل في المحطة - وهما Bumble و Honey ، وفي يوليو ، من المتوقع أن يصل الروبوت الثالث ، Queen ، إلى محطة الفضاء الدولية.

لا يتم ربط أسماءهم بسهولة مع المنمنمات ولديهم تصرفات "نحلة".
هذه عبارة عن روبوتات صغيرة مستقلة ذات خدمة مصممة خصيصًا للعمل في درجة انعدام الجاذبية داخل وحدات محطة الفضاء الدولية ، والتي صممتها وصممتها
ناسا في مركز أبحاث أميس ، والتي ينبغي أن تكون مثل النحل لتولي جزءًا من المهام الفضائية الروتينية وتحرر طاقم محطة الفضاء الدولية من الإجراءات البسيطة والمتكررة.
وبالتالي ، فإن مشروع Astrobee هو نظام الطيران الحر لمجموعة معقدة من الروبوتات ، والغرض الرئيسي منه هو اختبار المنصات الآلية الصغيرة الحجم في ظروف الجاذبية الصفرية مع استلام وتحليل البيانات في ظروف حقيقية وإمكانية زيادة تطوير وتحسين برامج ووظائف الروبوتات لأداء المهام الحالية والجديدة على محطة الفضاء الدولية.

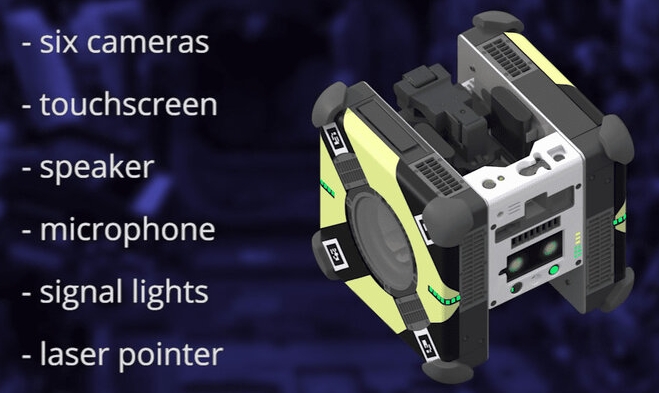
 خصائص الروبوتات لمشروع Astrobee:
خصائص الروبوتات لمشروع Astrobee:- حجم روبوت واحد هو 30 × 30 × 30 سم (1 × 1 × 1 قدم) ؛
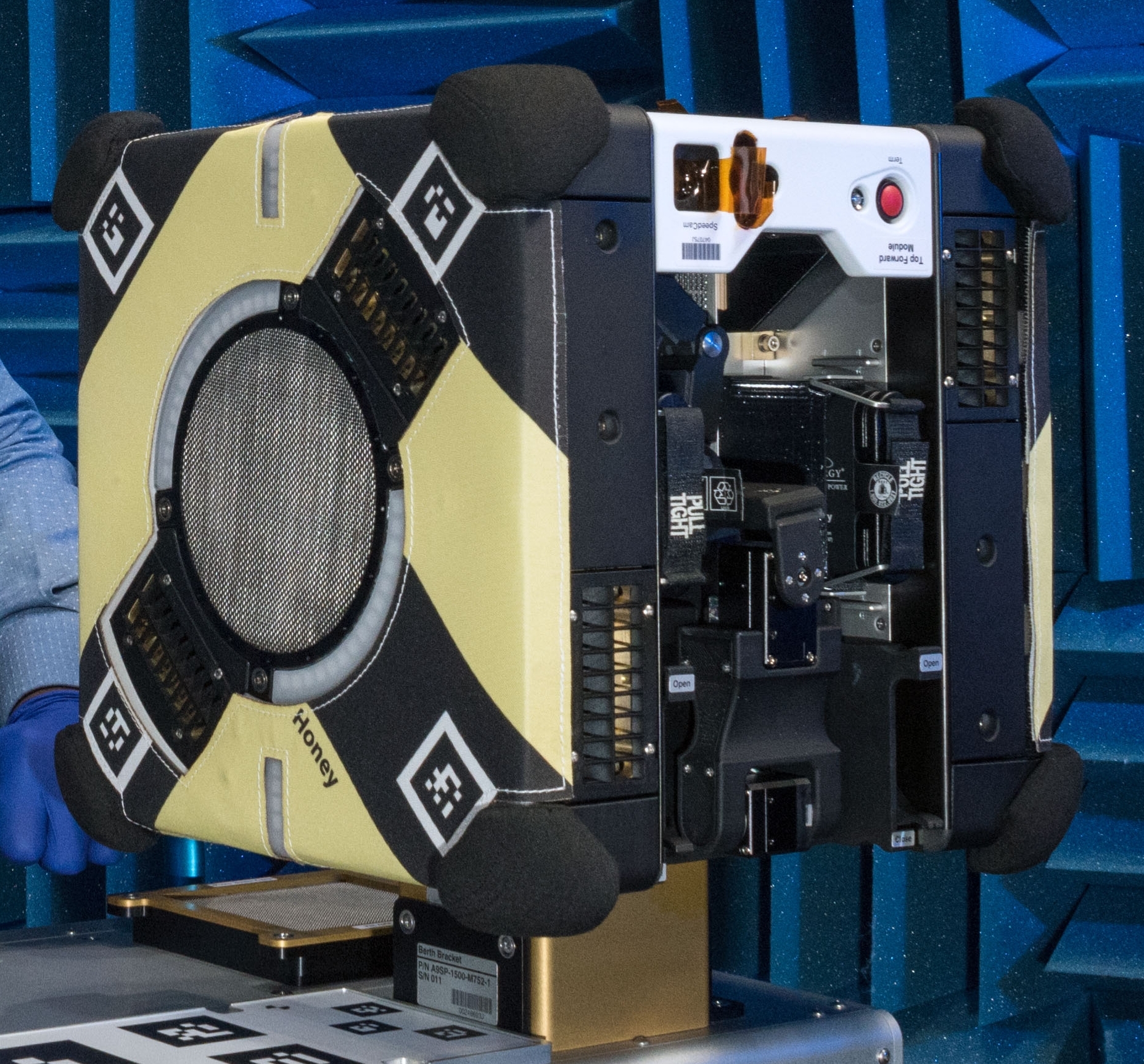
- جسم الروبوت مغطى بمادة ناعمة لتقليل الضرر المحتمل عند اصطدامه بجسم أو عنصر في محطة الفضاء الدولية ؛
- تم تصميم جزء من وجوه الروبوت للعمل مع أحمال صغيرة ، بل يوجد نظام لالتقاط وتحديد الأجسام باستخدام مناور قابل للطي بحيث يتمكن الروبوت من الاحتفاظ بنقل كائن ونقله بأمان من أحد طرفي المحطة إلى الطرف الآخر ، وبمساعدة هذا الالتقاط ، يستطيع الروبوت تحديد موضعه عندما ضروري ، اصطياد الدرابزين أو عناصر أخرى من المحطة الفضائية الدولية ؛

- لدى الروبوتات محطة شحن خارجية منفصلة ، تعمل على شحن بطاريات الروبوتات وأخذ بيانات القياس عن بُعد ؛

- لا يمكن للروبوتات أن تتحرك داخل محطة الفضاء الدولية إلا في ظروف انعدام الجاذبية فقط إذا كان هناك جو في وحدة العمل مع الروبوت ، ويستخدم نظامهم التفاعلي هواء المحطة للتحرك ؛
- كل روبوت لديه نظام التحكم بالكمبيوتر الخاص به لنظام المروحة على متن الطائرة ، والذي يسمح لك بالتقاط وتفريغ الهواء من خلال 12 فوهة في الاتجاه المعاكس لموجه الحركة المقصود ، مما يتيح للروبوت التحرك في أي اتجاه والانتقال بحرية حول المحطة الفضائية الدولية في درجة انعدام الجاذبية ؛
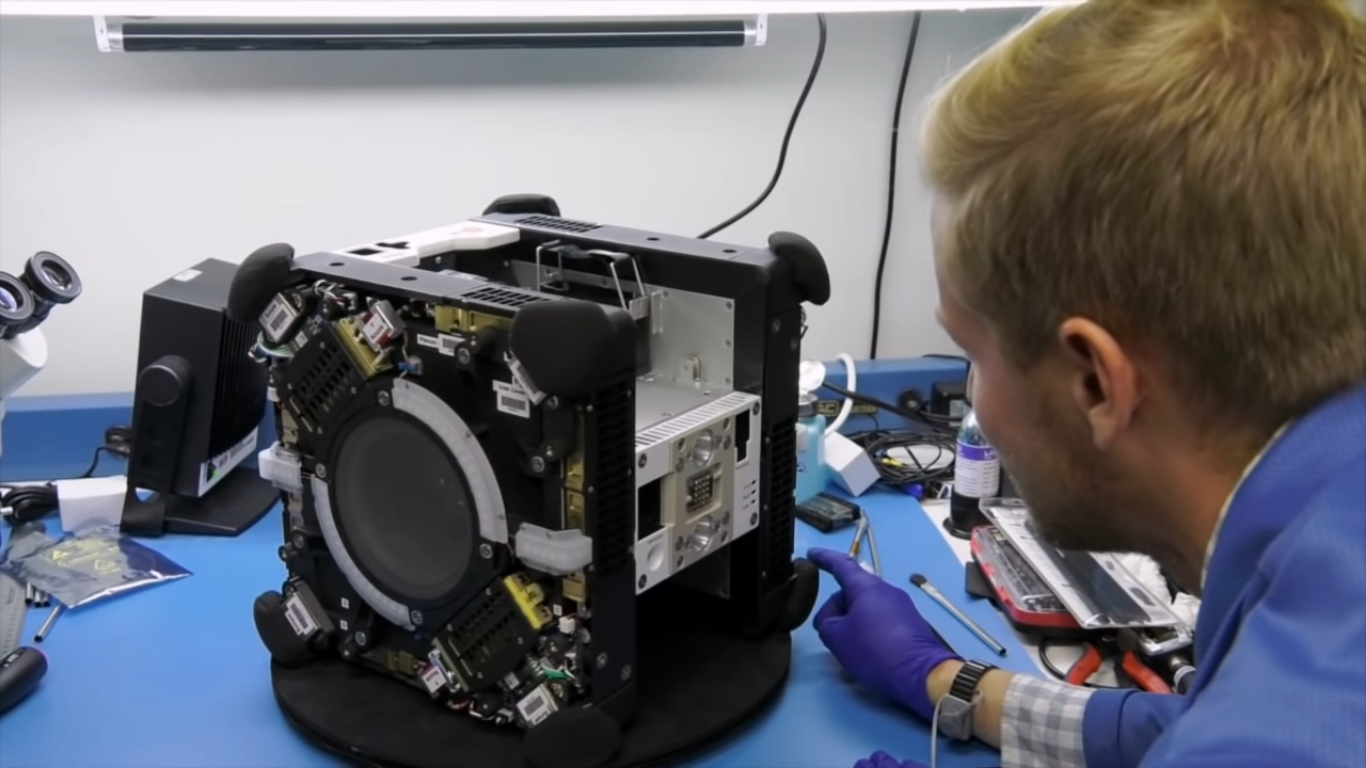
- تقع مراوح الروبوت خلف جدار حماية خاص على وجوه مكعبه ؛
- يعمل نظام الكمبيوتر الخاص بالروبوت على نظام Linux ، والوحدة المسؤولة عن العمل مع الأشياء ونقلها تعمل على أساس نظام Android ، مما يسمح لك بتوسيع وظائف النظام بسرعة إذا لزم الأمر ؛
-
رابط إلى مستودع جيثب مع برنامج مشروع Astrobee.
- يحتوي كل روبوت على متن الطائرة: كاميرا التنقل الرئيسية ذات مجال الرؤية 116 درجة ، والعديد من كاميرات HD ذات التركيز التلقائي القادر على نقل المعلومات من محطة الفضاء الدولية إلى الأرض في الوقت الحقيقي ، وكاميرا CamBoard Pico Flexx الموجودة على متنها تسمح للروبوت بالتعرف على الكائنات و عقبات من مسافة أربعة أمتار ؛
-
يحتوي كل روبوت على كاشف ضوئي لتحديد السرعة وإجراءات إيقاف الطوارئ ؛
- أوضاع تشغيل الروبوتات: مستقلة ، ويمكن أيضًا التحكم فيها عن بُعد ، والتقاطها بأمان ، ووضعها في حالة الضرورة ، وإيقاف تشغيلها.
 وظائف الروبوتات لمشروع Astrobee:
وظائف الروبوتات لمشروع Astrobee:- المهمة الرئيسية للروبوتات هي مساعدة الطاقم على محطة الفضاء الدولية ، وتنفيذ عدد من المهام الروتينية حتى يتمكن الموظفون من التركيز على المهام الأكثر أهمية (إجراء التجارب والدراسات المختلفة) ؛
- إجراء جرد وتجارب وثائق والتحقق من أنظمة محطة الفضاء الدولية ونقل الأحمال والأشياء والأدوات من خلال ممرات المحطة الضيقة وبين الوحدات النمطية ؛

- إجراء صيانة لوحدات محطة الفضاء الدولية عندما لا يوجد أفراد فيها أو في أماكن لا يستطيع الطاقم الوصول إليها بسرعة ؛
- مراقبة تشغيل أنظمة وأجهزة استشعار محطة الفضاء الدولية ؛
- مراقبة جودة الهواء ، وتحليل مستوى تركيز ثاني أكسيد الكربون في أماكن مختلفة من المحطة الفضائية الدولية كلما كان ذلك مطلوبًا.
 تاريخ ظهور روبوتات مشروع Astrobee على محطة الفضاء الدولية:
تاريخ ظهور روبوتات مشروع Astrobee على محطة الفضاء الدولية:- تم تسليم محطة الشحن على متن محطة الفضاء الدولية في 17 نوفمبر 2018 وتم تثبيتها في 15 فبراير 2019 ؛


يستخدم قاطع الدائرة ABB:

- تم إطلاق روبوت Bumble and Honey من الأرض إلى محطة الفضاء الدولية في 17 أبريل 2019 ؛

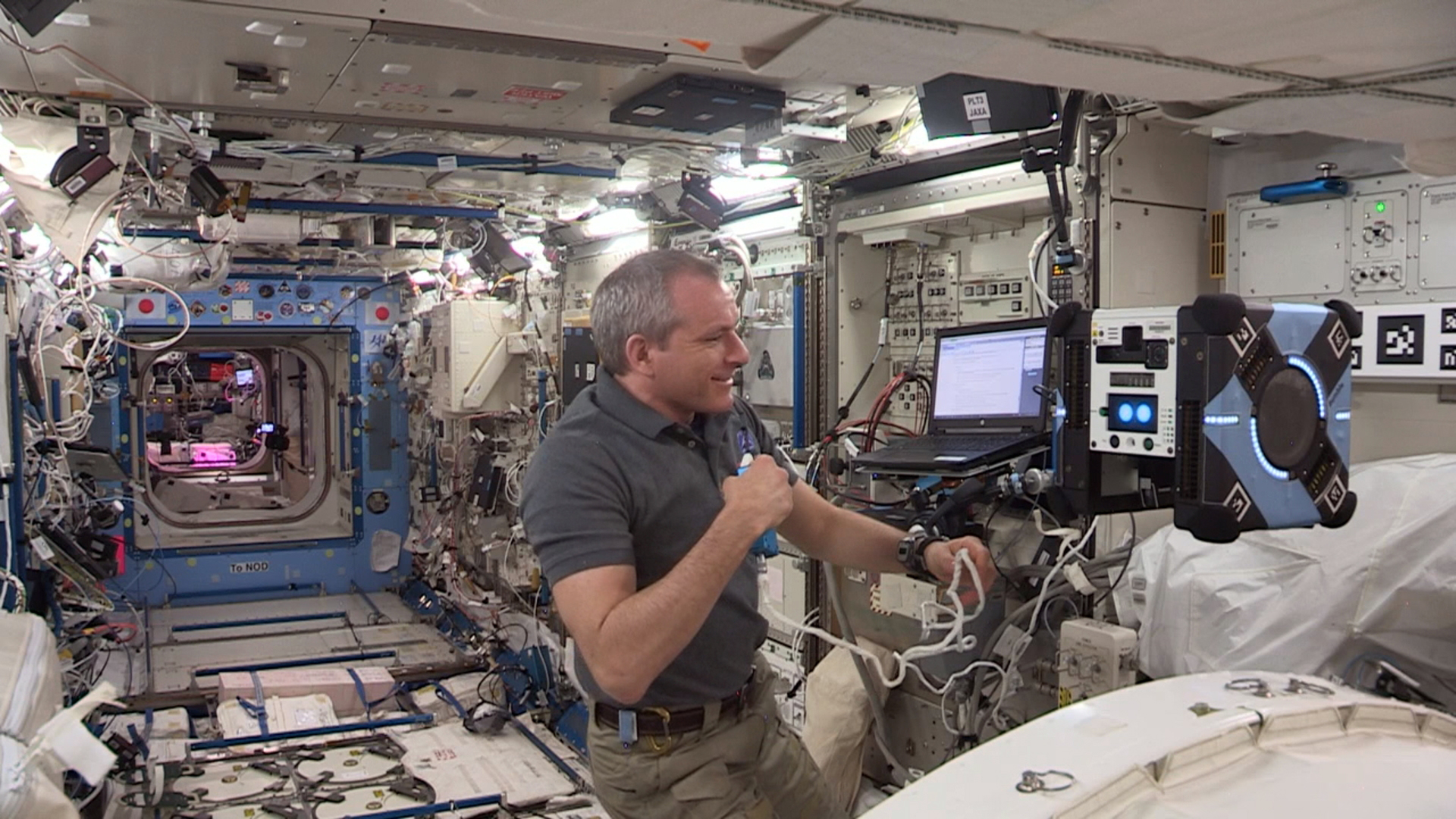
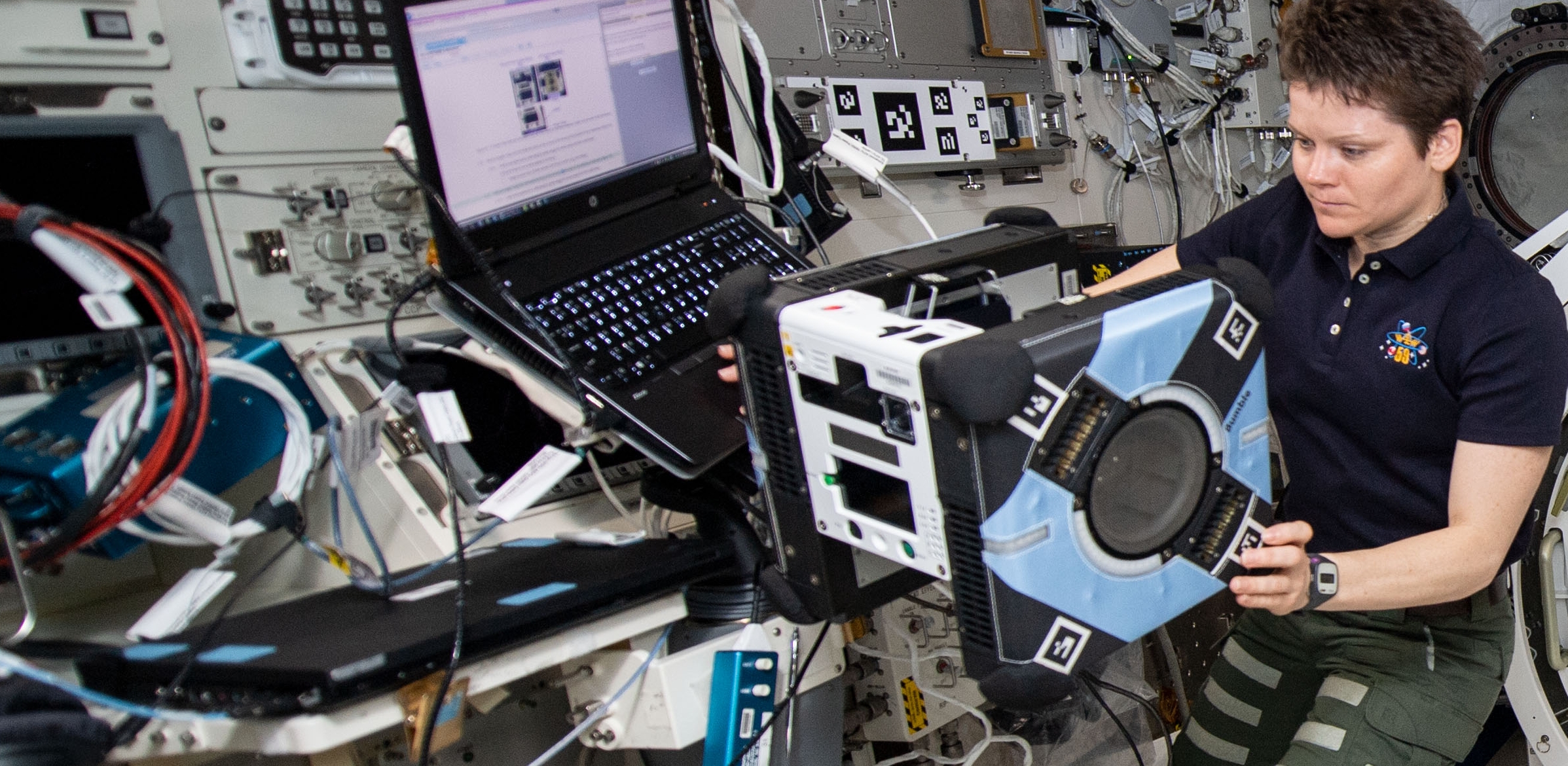
- في 30 أبريل 2019 ، قامت آن ماكلين (رائد فضاء محطة الفضاء الدولية) بتفريغ صندوق مع روبوت Bumble ، وبدعم من فريق التطوير التابع لناسا التابع لمشروع Astrobee ، الواقع في مركز أبحاث أميس ، اختبرت جميع أنظمة الروبوت المساعدة - إلكترونيات الطيران ، وكاميرات الفيديو ، وأنظمة الدفع ، و نقل البيانات وشحن البطاريات ؛





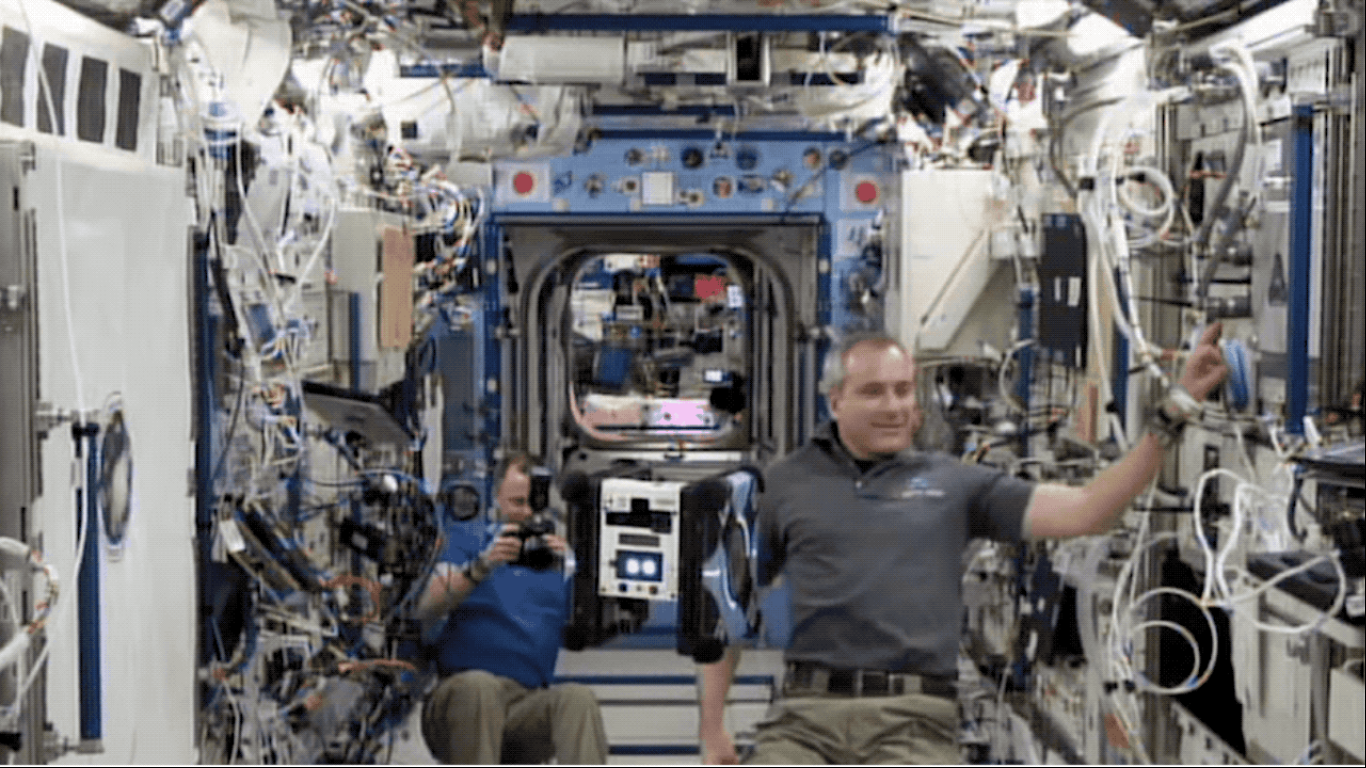
- في 14 يونيو 2019 ، بدأت اختبارات الطيران باستخدام روبوت Bumble ؛
- يوليو 2019 - من المتوقع وصول الروبوت الثالث للملكة إلى محطة الفضاء الدولية.
حول
الرحلة الأولى من
روبوت Astrobee
Bumble على محطة الفضاء الدولية:
في 14 يونيو ، 2019 ، أصبح روبوت Bumble أول روبوت لمشروع Astrobee ، الذي جعل أول رحلة تجريبية بدون أي خطورة.
قبل أول رحلة من روبوت Bumble ، قام فريق مشروع Astrobee في مركز أميس للأبحاث بفحص جميع أنظمته على متن الطائرة وتلقى تأكيدًا من Earth بأن الروبوت يمكنه تحديد موقعه ومستعد للتنقل داخل محطة الفضاء الدولية.
قدم رائد الفضاء في وكالة الفضاء الكندية David Saint-Jacques التدريب العملي في اختبارات الاختبار المبدئي عن طريق تحريك روبوت Bumble يدويًا داخل مختبر العلوم التابع لمحطة الفضاء الدولية في وحدة Kibo للسماح لنظام الملاحة الآلي بالمعايرة في البيئة الجديدة بعد حدوثها.
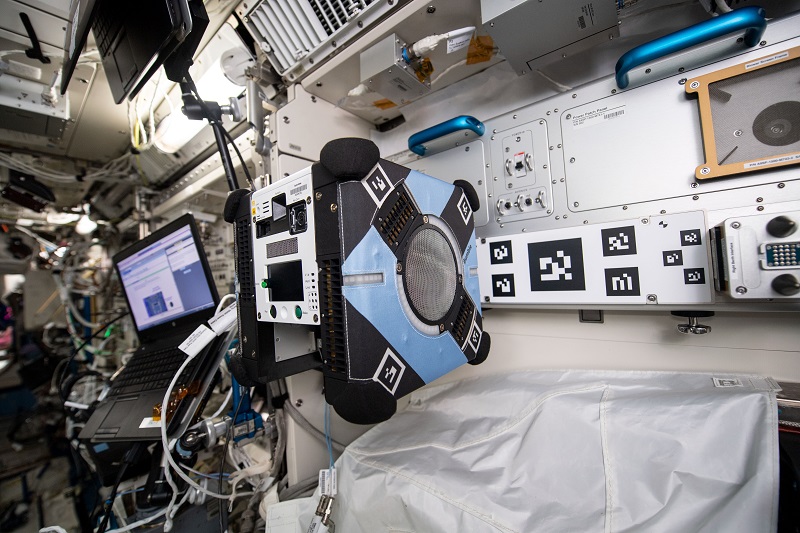
يستخدم نظام الملاحة في روبوت Bumble كاميرات بدوام كامل لمراقبة الفضاء الخارجي ومراقبته ثم يقارن الصور المستلمة مع خريطة ISS الداخلية التي تم تحميلها مسبقًا في الروبوت.

تم تصميم روبوتات مشروع Astrobe للتحرك في أي اتجاه وتدوير حول محاورهم في الفضاء على متن محطة الفضاء الدولية.
بعد ذلك ، بدأت الاختبارات في تشغيل أنظمة الطيران الخاصة بـ Bumble robot في الوضع التلقائي ووضع التحكم (عن بُعد من الأرض).
أثناء أول رحلة تجريبية لروبوت Bumble ، تم فحص تشغيل مكوناته الرئيسية على متن الطائرة وتم إجراء مجموعة من الحركات الأساسية ، مثل "الطيران 11.8 بوصة (30 سم) إلى الأمام" أو "تحويل 45 درجة إلى اليمين" ، والاتجاه في الفضاء محطة الفضاء الدولية وهلم جرا.

تخطط ناسا لمواصلة اختبار قدرات الطيران من روبوت Bumble مع سلسلة من المناورات المعقدة على نحو متزايد لتحديد مدى قدرة عناصرها على العمل في درجة انعدام الجاذبية وما هي التعديلات التي يلزم إجراؤها على البرنامج لاستخدامه مرة أخرى.
استنادًا إلى نتائج مجمع اختبارات الطيران هذه ، سيتم إنشاء الإعدادات الأساسية لنظام الدفع لروبوتات مشروع Astrobee ، بمساعدة من المخطط لمساعدة روبوتات Bumble و Honey و Queen على الاستعداد لتولي أدوار أعضاء طاقم ISS الجدد.
الرحلة الأولى للروبوت "Bumble" 
