واحدة من أخطر الكوارث التكنولوجية في تاريخ البشرية وقعت في 26 أبريل 1986. وبعد ذلك كرر تقريبا في 12 مارس 2011. كما كنت قد خمنت ، نحن نتحدث عن حوادث في محطة تشيرنوبيل للطاقة النووية في اتحاد الجمهوريات الاشتراكية السوفياتية ومحطة فوكوشيما -1 للطاقة النووية في اليابان. أثارت سلسلة تشيرنوبيل ، التي تم تصويرها بواسطة HBO ، الاهتمام في تاريخ حادثة تشيرنوبيل وتذكرت مدى صعوبة إيقاف إطلاق النويدات المشعة من المفاعل المدمر في الغلاف الجوي. بشكل منفصل ، تحدثوا عن الاستخدام غير الناجح للروبوتات والنداء القسري لمساعدة الناس. تجري اليابان العديد من التجارب مع مجموعة متنوعة من الروبوتات التي يمكن أن تؤخر الحاجة إلى جذب الناس للقضاء عليها.
إن للحوادث التي وقعت في محطة تشيرنوبيل للطاقة النووية وفوكوشيما أسباب مختلفة وقصة مختلفة للأحداث ، لكن لديهما قاسم مشترك واحد - المنطقة الشاسعة حول المحطات مصابة ، مما يجعل من المستحيل بالنسبة لهم العيش بأمان لفترة طويلة ، ولا يوجد أي تطهير كامل لوحدات الطاقة. في كلتا الحالتين ، لم تكن الإنسانية مستعدة لتصفية العواقب - فقد عمل مئات الآلاف من الأشخاص في الاتحاد السوفيتي على تطهير منطقة الاستبعاد وبناء تابوت واقي فوق المفاعل. في اليابان ، ذهبوا في الاتجاه الآخر.
المرجع: معايير التعرض
تمكنت عبارة حول خلفية الإشعاع من سلسلة تشيرنوبيل من أن تصبح ميم على شبكة الإنترنت الأجنبية: "3.6 الأشعة السينية ليست جيدة ، ولكنها ليست رهيبة." في الواقع ، هل يستحق الأمر أن نخاف من هذه الأشعة السينية 3.6 نفسها في الساعة ، أم أنها حقا ليست خلفية رهيبة؟ من أجل فهم أفضل للقياسات من فوكوشيما الواردة في المنشور أدناه ، يجب أولاً فهم حجم الجرعات وتأثيرها على الجسم.
الأشعة السينية (P) ، المعروفة لدى الروس ، هي وحدة عفا عليها الزمن لقياس الخلفية الإشعاعية التي لم يتم تضمينها في نظام SI. الآن يتم استخدام Sievert (Sv) بدلاً من ذلك. ببساطة ، 1 Sv تساوي 100 R. أي 3.6 R / h تساوي 0.036 Sv / h أو 36 mSv / h. في روسيا ، في بعض معاهد البحوث ، يمكنك رؤية لوحة ذات خلفية حالية ، مقاسة بالأشعة السينية. في المتوسط ، تتقلب الخلفية الحضرية في بلدنا على مستوى 12-20 ميكرون / ساعة أو 0.12-0.2 ميكروليتر / ساعة. يتلقى الشخص جرعة تبلغ حوالي 2.4 مللي سيفرت سنويًا من خلفية الإشعاع الطبيعي على كوكبنا (حسب البلد والارتفاع). هذا الإشعاع يأتي من الفضاء ، ويأتي من التربة والماء ، وهو موجود في الهواء ، وذلك بفضل غاز الرادون.
والآن طاولة صغيرة مع الجرعات التي نتلقاها طوال حياتنا (التعرض الوحيد المبين أدناه هو استلام الجرعة المناسبة لمدة تصل إلى 4 أيام):


دعنا نعود إلى 3.6 R / h المذكورة في هذه السلسلة. 0.036 Sv / h (36 mSv / h) هي في الحقيقة ليست خلفية رهيبة في حالة وقوع حادث ، لتطوير مرض الإشعاع الخفيف من الضروري البقاء في منطقة الخطر لأكثر من يوم ، وأعمال الإصلاح لعدة ساعات آمنة ومقبولة تمامًا. والآن نتذكر كيف قالوا بعد ذلك بقليل في السلسلة أن الخلفية في المفاعل ليست 3.6 ، ولكن 15000 الأشعة السينية (150 Sv / h). أربع دقائق مع مثل هذه الخلفية تنطوي على الموت لا مفر منه. بعد دقيقتين ، فقط أسرع رعاية طبية مؤهلة يمكن أن تعطي فرصة للخلاص ، و 25 ثانية تكفي للحصول على مرض الإشعاع.
توشيبا في فوكوشيما
بدأت الشراكة بين شركة Toshiba وشركة Tokyo Energy Company (TEPCO) في مرحلة مبكرة من مرحلة بناء محطة Fukushima-1 للطاقة النووية. كانت شركة Toshiba مسؤولة عن إنشاء مفاعلات من نوع BWR لوحدات الطاقة الثالثة والخامسة ، التي تم تشغيلها في عامي 1976 و 1978 ، على التوالي. من بين مزايا مفاعلات BWR انخفاض ضغط البخار في الدائرة الأولية من ، على سبيل المثال ، VVER السوفياتي ، وانخفاض درجات حرارة التشغيل. تشمل العيوب تعقيد التصنيع ، والحاجة إلى حالة كبيرة جدًا ، وتعقيد التحكم والتحليل الإشعاعي في عناصر الوقود ، مما يستلزم توليد الهيدروجين المتفجر.
إذا كان الحادث الذي وقع في محطة تشيرنوبيل للطاقة النووية بسبب عدم تصميم مفاعل RBMK ، الذي جعله يشعر خلال الانتهاكات خلال الاختبارات ، فكانت كارثتان طبيعيتان أدت إلى حادثة فوكوشيما. أدى زلزال بلغت قوته 9.0-9.1 إلى إغلاق المفاعلات ، وغمرت أمواج تسونامي التي أعقبت ذلك إقليم فوكوشيما -1 ومولدات الطوارئ التي تزود مضخات تبريد المفاعل. تركت مفاعلات المحطة ، التي لا تبرد على الفور في حالة توقف الطوارئ ، دون تدفق الماء البارد ، مما تسبب في غليانها ، مما أدى إلى زيادة ضغط البخار ودرجة الحرارة داخلها ، وتوليد الهيدروجين بسبب تلامس بخار الزركونيوم في عناصر الوقود (تفاعل بخار الزركونيوم) وانفجاره اللاحق . في وحدات الطاقة الأولى والثانية والثالثة ، ذوبان جوهر المفاعل وتسريب الوقود النووي. في فوكوشيما ، تتدفق النويدات المشعة إلى المحيط إلى جانب مياه التبريد ؛ وفي محطة تشيرنوبيل للطاقة النووية أثناء نشوب حريق ، دخلت إلى الغلاف الجوي وانتشرت في جميع أنحاء أوروبا.
 وقائع ما حدث في ثلاث وحدات الطاقة. تأثرت وحدة الطاقة الرابعة أيضًا ، لكن لم يكن هناك وقود نووي في مفاعلها ، لذا لم يكن هناك سوى حريق. المصدر: Roulex_45 / ويكيميديا
وقائع ما حدث في ثلاث وحدات الطاقة. تأثرت وحدة الطاقة الرابعة أيضًا ، لكن لم يكن هناك وقود نووي في مفاعلها ، لذا لم يكن هناك سوى حريق. المصدر: Roulex_45 / ويكيميديا
من أجل القضاء على حادث فوكوشيما ، من الضروري تجميع خريطة للأضرار ، والعثور على الوقود المنصهر ونقاط التسرب الخاصة به ، وإزالة الوقود النووي المستهلك من المفاعلات وعقد المسابح ، وتفكيك الأنقاض - أي القيام بعمل هائل تحت خلفية إشعاعية هائلة على قدم المساواة. الآن يتم تنفيذ هذا العمل في FAES بواسطة الروبوتات والسيارات التي يتم التحكم فيها عن بُعد - إرسال الأشخاص إلى منطقة الحوادث أمر بالغ الخطورة ، في بعض أماكن المحطة يمكن أن تقتل الخلفية شخصًا في دقائق معدودة.
تعمل Toshiba مع المعهد الدولي لبحوث إيقاف تشغيل المفاعلات النووية (IRID) على تطوير روبوتات للقيام بمهام محددة - فحص وحدات الطاقة في فوكوشيما وإزالة التلوث (تنظيف) للغرف من التلوث الإشعاعي. سنتحدث عن بعض من أكثر روبوتات Toshiba شهرة والتي قدمت مساهمتها الصغيرة ولكن المهمة في سبب الحادث.
بالمناسبة ، هناك رأي خاطئ مفاده أن تصفية فوكوشيما لم تأخذ في الاعتبار تجربة تشيرنوبيل القيمة. هذا خطأ جوهري. مباشرة بعد وقوع الحادث ، تم إنشاء مجموعة من الخبراء اليابانيين - الروس في مجال الطاقة النووية للتعامل مع عواقب حادث فوكوشيما - 1 ، من بينها لاريون ألكساندروفيتش ليبيديف ، وهو مشارك مباشر في محطة تشيرنوبيل للطاقة النووية منذ صيف عام 1986 ، وكان عضوًا في معهد موسكو للفيزياء الهندسية ، الذي قدم مساهمة كبيرة في دراسة الظروف الإشعاعية وبناء التابوت. بعد الحادث الذي وقع في اليابان ، قام Larion Lebedev بتحسين تقنية فصل التريتيوم عن المياه المشعة ، مما سمح لنا بالبدء في تنظيف الكميات الضخمة من الماء الثقيل المتبقي بعد تبريد المفاعلات المدمرة. نيابة عن الحكومة اليابانية ، حصل لاريون ألكساندروفيتش على وسام الشمس المشرقة ، التي مُنحت لمزايا عسكرية ومدنية.
أربعة أرجل الكشفية
أول روبوت توشيبا لدخول FAES كان بدون طيار أربعة أرجل الطائرة بدون طيار ، وبدأ تطويرها مباشرة بعد وقوع الحادث. كانت مهمته ، مثلها مثل جميع الروبوتات التي أطلقت في محطة توليد الكهرباء في السنوات الأولى ، استكشاف الإشعاع وتقييم الأضرار داخل وحدات الطاقة.
تم تثبيت مقياس الجرعات وست كاميرات على الهيكل المعدني لتفقد مباني المحطة. تم تصميم الإلكترونيات المحمية لتعمل بإشعاع قدره 100 مللي سيفرت / ساعة لمدة عام (مع يوم عمل لمدة 10 ساعات) وبخلفية أكبر بكثير لفترات قصيرة. صحيح أن شحنة بطارية واحدة كانت كافية فقط لمدة ساعتين من الوجود المستقل. تحرك الروبوت بسرعة حوالي 1 كم / ساعة ، وهو ما يكفي عند فحص وحدة الطاقة المدمرة. نفذت الإدارة على الهواء مع التكرار في حالة حدوث تداخل.
في الجزء السفلي من الجهاز ، تم تركيب طائرة استطلاع صغيرة بدون طيار ، والتي يمكن أن تنفصل عن حاملها وتزحف إلى أماكن ضيقة لا يستطيع فيها روبوت طويل الوصول إليه. كان من المفترض أن يتم استخدامه للبحث عن تسرب مياه التبريد تحت أنابيب المفاعل.
هذا لا يعني أن الآمال الكبيرة قد علقت على الروبوت: حتى في مرحلة العرض ، أشار الصحفيون إلى بطء الماكينة - استغرق الأمر دقيقة واحدة لتسلق كل خطوة من السلم ، وعند وضع القدم على سطح غير مستقر ، يمكن أن يتدحرج الروبوت إلى جانبه.
ومع ذلك ، لا تزال أول آلية تجريبية من Toshiba لـ FAES تمكنت من اختراق مبنى وحدة الطاقة الثانية وإجراء القليل من الاستطلاع. نشرت تيبكو تقريرًا في 11 ديسمبر 2012. التقط الروبوت صورًا لأحد الأنابيب ، مما يؤكد عدم وجود تسربات. في مارس 2013 ، ذهب إلى الداخل خمس مرات أخرى. ولكن سرعان ما ، أثناء محاولة تفتيش المبنى أكثر ، فقد الروبوت التوازن على الدرج وسقط إلى جانبه. بسبب عدم وجود آلية تحول ، ظل الكشاف ذو الأربعة أرجل ملقى في المجموعة الثانية.
للطي مستكشف العقرب
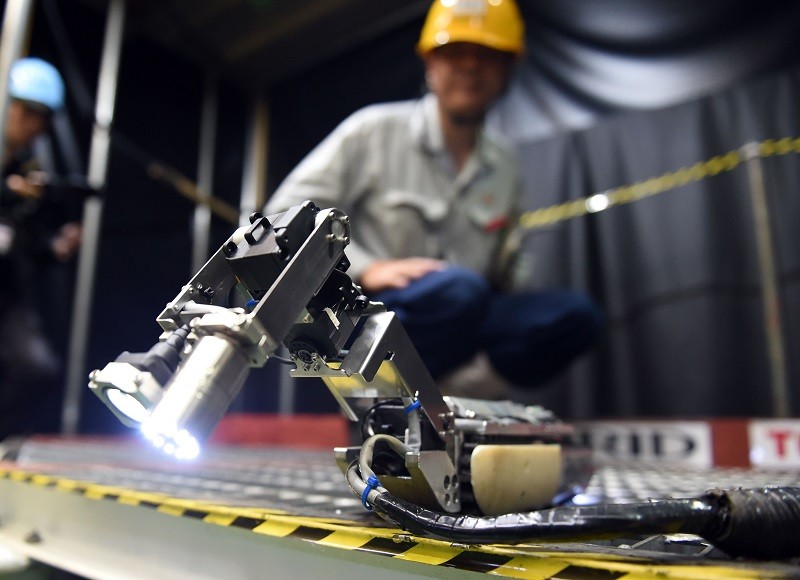
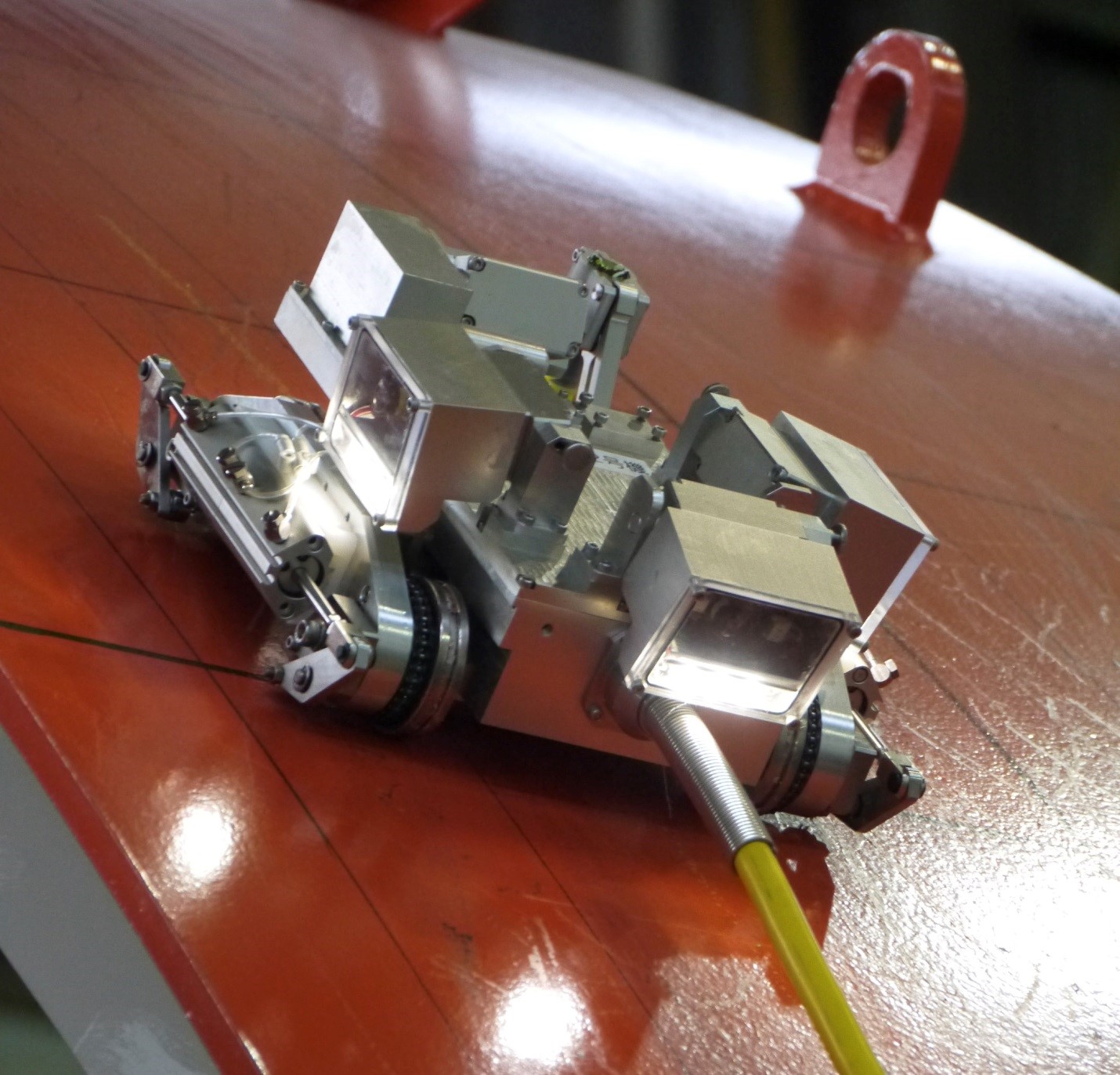
الروبوت التالي للشركة ، والذي أخذ في الاعتبار جميع أوجه القصور في النموذج السابق ، كان توشيبا العقرب ، واسمه لذلك لشكله (صورة اللقب). تم تطويره لمهمة صعبة للغاية - لدراسة الجزء السفلي من المفاعل والبحث عن قضبان الوقود ، وهذه المهمة تنطوي على العمل مع خلفية إشعاعية ضخمة. تم تجنيب برج العقرب الأرجل ، التي تم استبدالها بالمسارات ، ومن أجل الاكتناز ، كان التصميم قابلاً للطي - كان من المفترض أن يتم طرح السيارة في المفاعل عبر الممرات لتحميل قضبان الوقود. في وضع التشغيل ، يرفع الروبوت مناوره الذيل ، متحركًا على ثلاثة محاور بطريقة العقرب ، وفي نهايته يتم تكييف مصابيح LED ومصباح خلفي بدلاً من اللدغة. يتم تركيب كاميرا أخرى على المقدمة وتتطلع دائمًا إلى الأمام.
يتم التحكم في العقرب بواسطة المشغل عبر الكابل ، لذلك لا توجد مشاكل في نقل الطاقة والإشارة. بالإضافة إلى ذلك ، أصبح الروبوت قابلاً للإرجاع ، ولا ينبغي أن يبقى في المفاعل بعد إرسال الشهادة. قلبه ليس خائفًا ، فإن "الذيل" مع الكاميرا يعيد الروبوت إلى وضعه الطبيعي.
لعدة سنوات ، تم وضع اللمسات الأخيرة على العقرب من أجل الوصول إلى داخل FAES - مع مرور الوقت ، تلقى مدفع مياه صغير لتطهير الطريق ، دلو وقاطع للعمل مع corium. في فبراير 2017 ، ذهب الروبوت إلى المفاعل ، حيث قام بقياس الخلفية والتقاط فيديو. أظهر مقياس الجرعات 210 Sv / h مثيرة للإعجاب (21000 R). في الغرفة المجاورة ، حيث كان هناك عمال يقومون بتحميل الروبوت في الأنبوب ، كانت الخلفية 6 مللي ثانية / ساعة.
روف: غواصة صغيرة
 غواصة صغيرة مع كاميرات الفيديو ، والتي لديها توقعات كبيرة. المصدر: توشيبا
غواصة صغيرة مع كاميرات الفيديو ، والتي لديها توقعات كبيرة. المصدر: توشيبا
أداة التحكم عن بعد تحت الماء ، أو ROV لفترة قصيرة ، هي أول روبوت عائم من Toshiba تم تصميمه لدراسة مفاعل وحدة الطاقة الثالثة ، التي يتم إخفاء الجزء السفلي منها تحت عمود مياه بطول ستة أمتار. هذه الغواصة الصغيرة ذات أبعاد 30 × 13 سم ويزن 2 كجم تحمل كاميرتين وإضاءة خلفية ، يتم التحكم فيها بواسطة كابل ويمكن أن تتحرك تحت الماء في أي اتجاه بدقة عالية. يتم التحكم في الجهاز من قبل المشغل ، ويتم توفير الإشارة والطاقة عبر كابل طويل. لمنع السلك من التشابك والتشبث بالحطام ، طورت Toshiba طبقة خاصة بأقل قدر من الاحتكاك ، وتم تثبيت محركين قويين على ROV نفسه ، بحيث يمكن للروبوت سحب الكابل معه بسهولة.
بالمناسبة ، كان قطر ROV البالغ 14 سم بسبب مدخل ضيق في وعاء المفاعل بوحدة الطاقة الثالثة ، لذلك كان على مهندسي Toshiba العمل بجد لتركيب الإلكترونيات والحماية والمحركات في مثل هذه الحقيبة المدمجة. في نهاية دورة تدريبية مكثفة لمدة شهرين للمشغلين ، ذهبت توشيبا روف إلى FAES. زار الروبوت المفاعل في 19 يوليو و 21 و 22 ، 2017 ، وتفقد بنجاح أحشاء المدمرة.
SC-ROV المغناطيسي
ومن الأماكن الأخرى التي يتعذر الوصول إليها والتي تتراكم فيها المياه مع النويدات المشعة غرف تخفيف الضغط الحلقية الموجودة أسفل المفاعل. كان من الضروري إرسال روبوت للبحث عن التسريبات أسفل الكاميرا ، ولكن الأمر معقد بسبب حقيقة أن الاحتواء غمرته المياه - كان الروبوت مطلوبًا لتفقد الأنابيب المغمورة بالمياه الموحلة. الأجهزة العائمة لم تكن مناسبة لذلك ، كانت هناك حاجة إلى تحقيق يتم تثبيته على الأنبوب وقادر على السير على طوله دون الانزلاق حتى بزاوية كبيرة.
كيفية إصلاح الروبوت على أنابيب الصلب بحيث لا لفة؟ بمساعدة المغناطيس. تم تصميم SC-ROV من Toshiba خصيصًا لغرفة تخفيف الضغط. إنه هيكل بعجلات مصنوعة من مغناطيس نيوديميوم قوي. باستخدام أربع كاميرات وعلامة ، يمكن للمشغل التحرك على طول سطح أنبوب مغمور تحت الماء ووضع علامات على الثقوب الموجودة.
 أثناء العرض ، عقدت SC-ROV المغناطيس بشكل مثالي على السطح المائل. لكن الظروف الحقيقية كانت أكثر صرامة. المصدر: IRID
أثناء العرض ، عقدت SC-ROV المغناطيس بشكل مثالي على السطح المائل. لكن الظروف الحقيقية كانت أكثر صرامة. المصدر: IRID
وفقًا لنتائج SC-ROV في عام 2014 ، لم يتم العثور على أي تسربات ، ولكن تم العثور على مشاكل في تشغيل الجهاز. أولاً ، بسبب تعكر الماء ، لم يتجاوز مدى الرؤية 30-35 سم ، مما أدى إلى تباطؤ عملية البحث بشكل كبير. ثانياً ، بسبب بعض العيوب في سطح الأنبوب ، انزلق الروبوت منه عندما تميل إلى 120 درجة.
كاميرا بحث Corium
أظهرت مهام البحث السابقة صورة محبطة - فقد تجاوز الوقود النووي في مفاعل وحدة الطاقة الثانية سفينة المفاعل. أوضحت صور المشابك المذابة في الجزء السفلي من الاحتواء أن الوقود موجود بالفعل في مكان ما في القاع. ولكن هل أعاق الاحتواء أم غرق الكوريوم في الأرض؟ كان من الضروري إرسال روبوت جديد إلى "جحيم" المفاعل السابق لوقود يتلاشى بشكل لا يصدق.
 تكون الشبكة المنصهرة داخل احتواء المفاعل الثاني أعلى تمامًا من محرك قضبان نظام التحكم والحماية. المصدر: تيبكو
تكون الشبكة المنصهرة داخل احتواء المفاعل الثاني أعلى تمامًا من محرك قضبان نظام التحكم والحماية. المصدر: تيبكو
تعمل روبوتات الزاحف فقط على أرضية مسطحة ، وتحتاج الغواصة إلى سمك من الماء. توصلت توشيبا إلى كاميرا مراقبة عن بعد مثبتة في نهاية أنبوب تلسكوبي طوله خمسة أمتار. بغض النظر عن زاوية دخول الأنبوب إلى الحاوية ، تتخذ الكاميرا موقعًا رأسيًا تمامًا - حيث يتم تثبيت الوحدة الرئيسية بواسطة كابل التحكم ، أي أن الكاميرا تبدو "معلقة على السلك". تدور العدسة 360 درجة أفقياً و 120 درجة رأسياً. في الواقع ، هناك كاميرتان على الجهاز في آن واحد - تعمل مباشرة وكاميرا للتوجيه. بالإضافة إلى العدسات ، يتم تثبيت الإضاءة الخلفية ومقياس الجرعات ومقياس الحرارة على الوحدة. يتحمل الجهاز الجرعة الممتصة التي تصل إلى 1000 رمادية.
عملت النسخة الأولى من الكاميرا في فوكوشيما في يناير 2018 ، حيث نجحت في العثور على الكوريوم وقياس الخلفية عند 530 Sv / h (53000 من الأشعة السينية). لكن العمل لم ينته عند هذا الحد - فقد كان مطلوبًا أخذ عينات للتحليل. في الإصدار المحدّث من الجهاز ، تم تحسين الإضاءة الخلفية وإضافة ذراع منزلق. في فبراير 2019 ، استلمت كاميرا Toshiba التي يتم التحكم فيها عن بُعد لأول مرة عينة من وحدة من وحدة الطاقة الثانية.
آلة التنظيف
يجب إلغاء تنشيط مباني وحدات الطاقة عاجلاً أم آجلاً ، لكن عليك أولاً وضع خريطة للتلوث. أظهرت نتائج العديد من المهام البحثية صورة قاتمة للغاية: على عكس التوقعات ، لم تستقر معظم النويدات المشعة على الأرض أو على الجدران ، ولكن على العناصر ذات المستوى الأعلى ، مثل خطوط الأنابيب والتهوية - شكلت ما يصل إلى 70 ٪ من جميع الإشعاعات. إن عملية تطهير الأرض بسيطة نسبيًا ، والجدران أكثر تعقيدًا بعض الشيء ، لكن كيف تصل إلى الأوساخ على السقف وفي تعقيدات الأنابيب ، نظرًا لأن ارتفاع الأسقف في الطابق الأول يتراوح بين 7-8 أمتار؟
 "منظف" للنويدات المشعة من Toshiba - ارتفاعه 8 أمتار ويتخلص من الجدران بجد. المصدر: IRID
"منظف" للنويدات المشعة من Toshiba - ارتفاعه 8 أمتار ويتخلص من الجدران بجد. المصدر: IRID
طورت توشيبا روبوتًا يشغل مدفعًا به مسحوق جليدي جاف يغطي السطح ، ويربط الجزيئات المشعة ، ويقوم الروبوت بفتحه ويمتص نفسه. الآلية ترفع الهيكل إلى ارتفاع 8 أمتار. نظرًا لأن هذا جهاز آخر يتم التحكم فيه عن بُعد ، يتلقى المشغل صورة من 22 كاميرا في نفس الوقت. بدأت الآلة في تنظيف وحدات الطاقة في يناير 2016. إنتاجيتها صغيرة ، ولكن حتى المساهمة الصغيرة في إزالة التلوث من المحطة تعتبر قيمة.
مساعدة ولكن ليس الحل
لقد مرت 33 سنة على الحادث الذي وقع في محطة تشيرنوبيل للطاقة النووية ، ومنذ ذلك الحين حققت التكنولوجيا طفرة هائلة. يشارك الآن عشرات الروبوتات وأنواع معدات البناء التي يتم التحكم فيها عن بُعد في القضاء على العواقب في فوكوشيما. نشر موقع TEPCO على شبكة الإنترنت الكثير من التقارير ، والبيانات التي تشكل من خلالها صورة حزينة للغاية: هناك روبوتات وهناك تقنيات ، لكنهم جميعا لم يقتربوا من فعالية مصافي تشيرنوبيل. يستغرق تطوير الروبوتات واختبارها شهورًا وسنوات ، وكانت نتيجة عملها هي التقدم بعشرة أمتار ، وجمع بيانات قياس الجرعات ، والفيديو الموحل ، وإنهاء المهام بشكل متكرر بسبب مشاكل غير متوقعة.
كل روبوت في فوكوشيما هو أشخاص منقذون ، وكل حياة بشرية تستحق المشاركة في تطوير الروبوتات. لكن خطط TEPCO الحالية توضح أنه وفقًا لتقديرات متحفظة ، سيستغرق الأمر ما بين 30 إلى 40 عامًا على الأقل للتعامل مع عواقب الحادث. وهذا يؤكد فقط البطولة وحجم الانجاز من التصفية السوفيتية لتشرنوبيل.