مقدمة
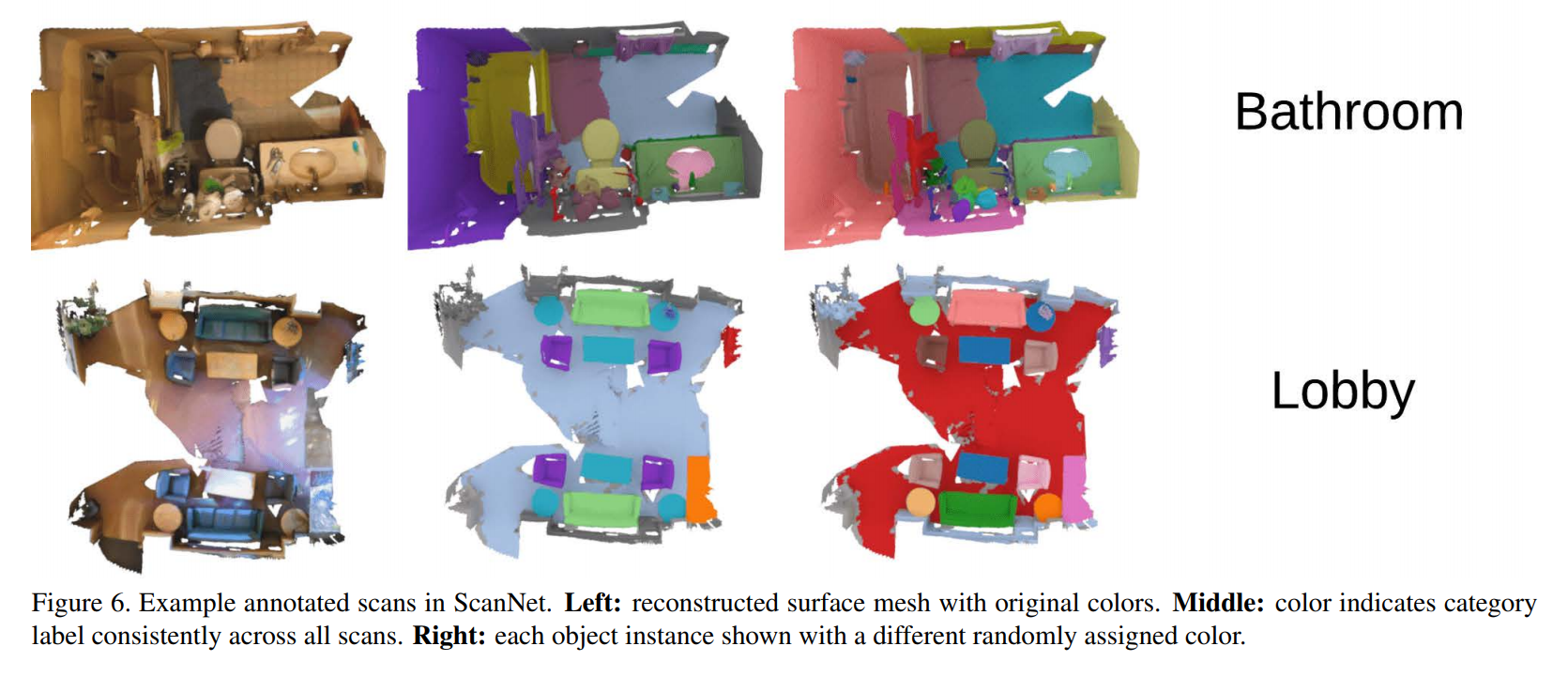
منذ بعض الوقت ، كنت بحاجة إلى حل مشكلة تجزئة النقاط في Point Cloud (السحب نقطة هي البيانات التي تم الحصول عليها من النجوم).
مثال البيانات والمهمة التي يتعين حلها:
لم ينجح البحث عن نظرة عامة على الطرق الحالية ، لذلك اضطررت لجمع المعلومات بنفسي. يمكنك رؤية النتيجة: هنا يتم جمع المقالات الأكثر أهمية وإثارة للاهتمام (في رأيي) على مدى السنوات القليلة الماضية. تحل جميع النماذج المدروسة مشكلة تقسيم سحابة نقطة (إلى أي فئة تنتمي كل نقطة).
ستكون هذه المقالة مفيدة لأولئك الذين لديهم دراية بالشبكات العصبية ويريدون فهم كيفية تطبيقها على البيانات غير المهيكلة (على سبيل المثال ، الرسوم البيانية).
مجموعات البيانات الحالية
الآن في المجال العام ، توجد مجموعات البيانات التالية حول هذا الموضوع:
ميزات العمل مع Point Clouds
لقد وصلت الشبكات العصبية إلى هذه المنطقة مؤخرًا. كما أن البنى القياسية مثل الشبكات المرتبطة بشكل كامل وشبكات التلافيف لا تنطبق على هذه المشكلة. لماذا؟
لأن ترتيب النقاط ليست مهمة هنا. الكائن عبارة عن مجموعة من النقاط ولا يهم بأي ترتيب يتم عرضها. إذا كان لكل بكسل مكانه في الصورة ، فيمكننا خلط النقاط بأمان ولا يتغير الكائن. على العكس من ذلك ، تعتمد نتيجة الشبكات العصبية القياسية على موقع البيانات. إذا قمت بخلط البكسلات في الصورة ، فستحصل على كائن جديد.
الآن دعونا نرى كيف تتكيف الشبكات العصبية لحل هذه المشكلة.
أهم المقالات
لا توجد العديد من الهياكل الأساسية في هذا المجال. إذا كنت تنوي العمل باستخدام الرسوم البيانية أو البيانات غير المهيكلة ، فيجب أن تكون لديك فكرة عن النماذج التالية:
لننظر فيها بمزيد من التفصيل.
- PointNet: التعلم العميق على مجموعات النقاط للتصنيف والتصنيف ثلاثي الأبعاد
رواد في العمل مع بيانات غير منظمة.
- كيف يقررون: تصف المقالة نموذجين: لتقسيم النقاط وتصنيف كائن ما. الجزء العام يتكون من الكتل التالية:
- شبكة لتحديد التحويل (ترجمة نظام الإحداثيات) ، والتي تنطبق بعد ذلك على جميع النقاط
- التحول المطبق على كل نقطة على حدة (الإدراك العادي)
- maxpooling ، الذي يجمع المعلومات من نقاط مختلفة ويقوم بإنشاء متجه معالم عالمي للكائن بأكمله.
- ثم تبدأ الاختلافات بين النماذج:
- نموذج التصنيف: ينتقل متجه المعالم العامة إلى إدخال طبقة متصلة بالكامل لتحديد فئة سحابة النقطة بأكملها
- نموذج للتجزئة: ينتقل متجه المعالم العامة والميزات المحسوبة لكل نقطة إلى إدخال الطبقة المتصلة بالكامل والتي تحدد الفئة لكل نقطة.
- قانون



مقالات مبنية على PointNet و PointNet ++:
تختلف معظم المقالات من حيث عدد الأخطاء أو عمق وتعقيد الكتل المعقدة.

- تعرف على ما يفعله جيرانك: تجزئة الدلالات ثلاثية الأبعاد لغيوم النقاط
- كيف يقررون: في البداية ، يعتبرون العلامات لفترة طويلة ، أكثر تعقيدًا من PointNet ، مع مجموعة من الروابط المتبقية ، والمبالغ ، ولكن بشكل عام - نفس الشيء. هناك اختلاف بسيط - حيث يقومون بحساب علامات كل نقطة في الإحداثيات العالمية والمحلية.
الفرق الرئيسي هنا هو عدد الأخطاء مرة أخرى. هذا ليس تقاطعًا قياسيًا ، ولكن مجموع الخطأين:
- فقدان المسافة الزوجية - يجب أن تكون النقاط من كائن واحد أقرب من τ_near وأن تكون النقاط من كائنات مختلفة أطول من far_far .

- فقدان النقطه الوسطى - النقاط من كائن واحد يجب أن تكون قريبة من بعضها البعض
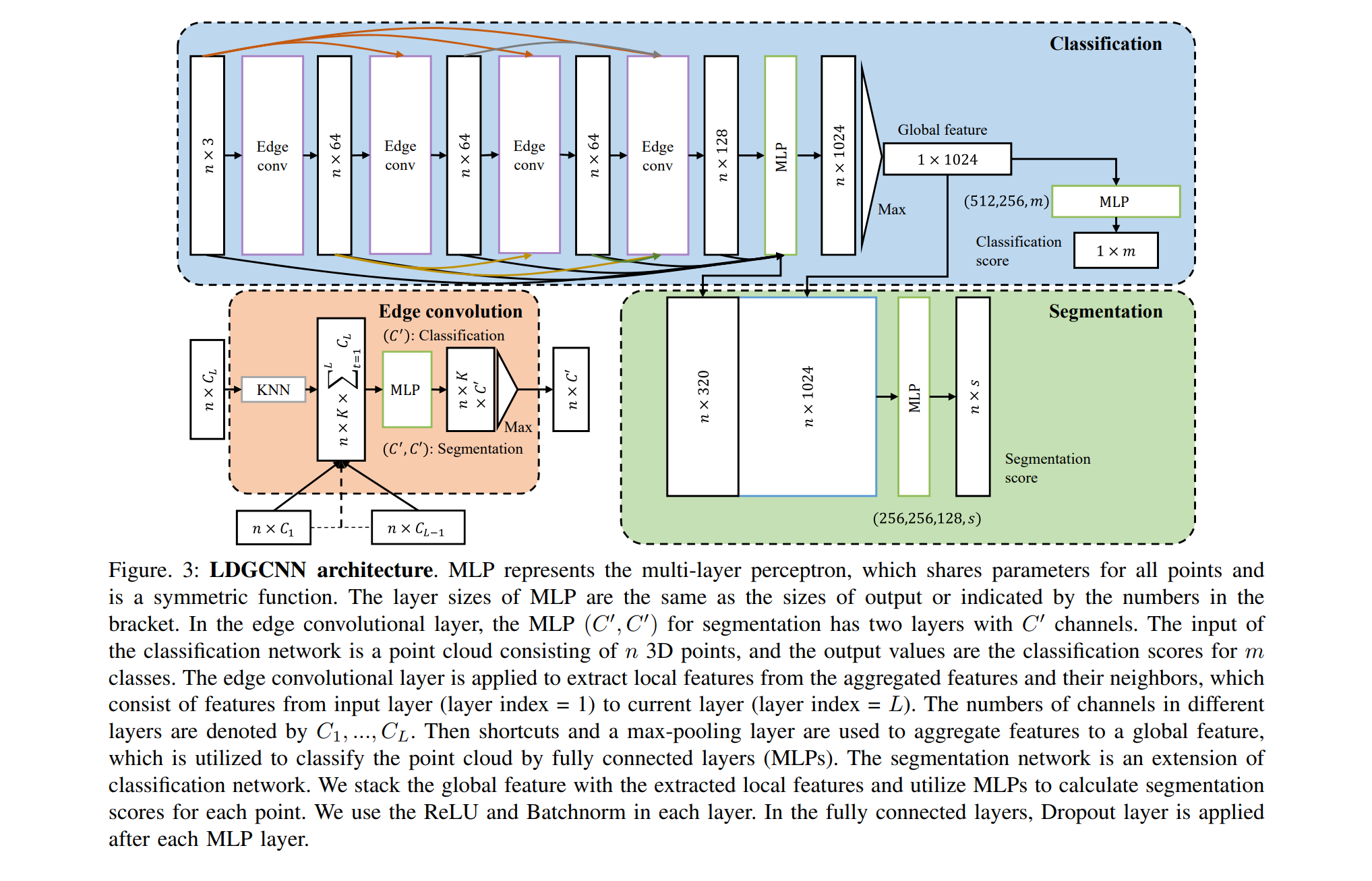
مقالات مقرها DGCNN:
تم نشر DGCNN مؤخرًا (2018) ، لذلك هناك عدد قليل من المقالات تعتمد على هذه البنية. أريد أن ألفت انتباهكم إلى شيء واحد:
استنتاج
هنا يمكنك العثور على معلومات مختصرة حول الطرق الحديثة لحل مشاكل التصنيف والتجزئة في Point Clouds. هناك نموذجان رئيسيان (PointNet ++ ، DGCNN) ، تُستخدم التعديلات الآن لحل هذه المشكلات. في أغلب الأحيان ، من أجل التعديل ، يتم تغيير وظيفة الخطأ وتعقيد هذه البنى عن طريق إضافة طبقات وروابط.