نشر الموظفون في جامعة سيول
دراسة حول محاكاة حركة الشخصيات ثنائية القدم بناء على العمل المشترك وانقباضات العضلات ، باستخدام شبكة عصبية مع التعلم العميق التعزيز. تحت ترجمة قطع من نظرة عامة.
اسمي Jehee لي. أنا أستاذ بجامعة سيول الوطنية وباحث في رسومات الحاسوب ولديها أكثر من 25 عامًا من الخبرة. أنا أستكشف طرقًا جديدة لفهم وتمثيل ومحاكاة حركات الإنسان والحيوان.
كانت محاكاة حركات الشخصيات ثنائية القدم القائمة على الفيزياء مشكلة معروفة في مجال الروبوتات ورسومات الكمبيوتر منذ منتصف الثمانينات. في تسعينيات القرن الماضي ، كانت معظم وحدات التحكم ذات النقطتين تعتمد على نموذج ديناميكي مبسط (على سبيل المثال ، على البندول المقلوب) ، والذي سمح باستخدام استراتيجية التوازن ، والتي يمكن اشتقاقها في معادلة مغلقة الشكل. منذ عام 2007 ، يبدو أن أجهزة التحكم تستخدم ديناميكيات الجسم بالكامل لتحقيق تقدم سريع في هذا المجال. من الجدير بالذكر أن نظرية التحكم الأمثل وطرق التحسين العشوائية ، مثل CMS-ES ، كانت الأدوات الرئيسية للحفاظ على توازن biped المحاكاة.
تدريجيا ، بنى الباحثون نماذج أكثر تفصيلا للجسم البشري. في عام 1990 ، كان لنموذج البندول المقلوب أقل من خمس درجات من الحرية. في عام 2007 ، كان النموذج الديناميكي شخصية ثنائية الأبعاد يقودها محركات في المفاصل مع عشرات من درجات الحرية. في 2009-2010 ، ظهرت نماذج ثلاثية الأبعاد كاملة مع 100 درجة من الحرية.
في 2012-2014 ، ظهرت وحدات التحكم في النماذج الميكانيكية الحيوية ، مدفوعة العضلات. ترسل وحدة التحكم إشارة إلى كل عضلة فردية في كل لحظة من الوقت لتحفيزها. تقلص العضلات يسحب العظام المتصلة ويضعها في الحركة. في عملنا ، استخدمنا 326 عضلة لتحريك النموذج ، بما في ذلك جميع العضلات الرئيسية لجسمنا ، باستثناء بعض العضلات الصغيرة.
صعوبة في التحكم في حركة الشخصية ثنائية القدم
عدد درجات حرية النظام الديناميكي يتزايد بسرعة منذ عام 2007. النهج السابقة لتصميم وحدات التحكم التي عانت من "لعنة الأبعاد" - عندما تزداد موارد الحوسبة المطلوبة (الوقت والذاكرة) بشكل كبير مع زيادة عدد درجات الحرية.
استخدمنا التعلم الداعم العميق لحل المشكلات المرتبطة بتعقيد نموذج الجهاز العضلي الهيكلي وقابلية التحكم في المخلوقات ثنائية القدم. يمكن للشبكات تمثيل سياسات الإدارة متعددة الأبعاد وتخزينها بكفاءة (دالة تقوم بتخطيط الحالات لإجراءات) واستكشاف الحالات والإجراءات غير المرئية.

نهج جديد
التحسن الرئيسي هو كيف نتعامل مع تنشيط العضلات للجسم كله. أنشأنا شبكة هرمية ، والتي تتعلم في الطبقات العليا محاكاة حركة المفاصل بمعدل إطار منخفض (30 هرتز) ، وفي الطبقات السفلية ، تتعلم تحفيز العضلات بترددات عالية (1500 هرتز).
تتطلب ديناميات تقلص العضلات دقة أكبر من محاكاة الهيكل العظمي. هيكلنا الهرمي يزيل الاختلافات في المتطلبات.
ماذا حققنا؟
من الجيد أن نرى كيف تعمل خوارزمية لدينا على مجموعة واسعة من الحركات البشرية. ما زلنا لا نعرف مدى اتساعها بالفعل ونحاول فهم الحدود. حتى الآن لم نصل إليهم بسبب الحد من موارد الحوسبة.
يوفر النهج الجديد نتائج محسنة في كل مرة نستثمر فيها المزيد من الموارد (بشكل أساسي نوى المعالج). النقطة المهمة هي أن التعلم العميق التعزيز لا يتطلب تكلفة حسابية إلا في مرحلة التدريب. بمجرد استكشاف سياسة الإدارة متعددة الأبعاد ، تصبح المحاكاة والإدارة سريعة. ستعمل محاكاة النظام العضلي الهيكلي قريبًا في التطبيقات التفاعلية في الوقت الفعلي. على سبيل المثال ، في الألعاب.
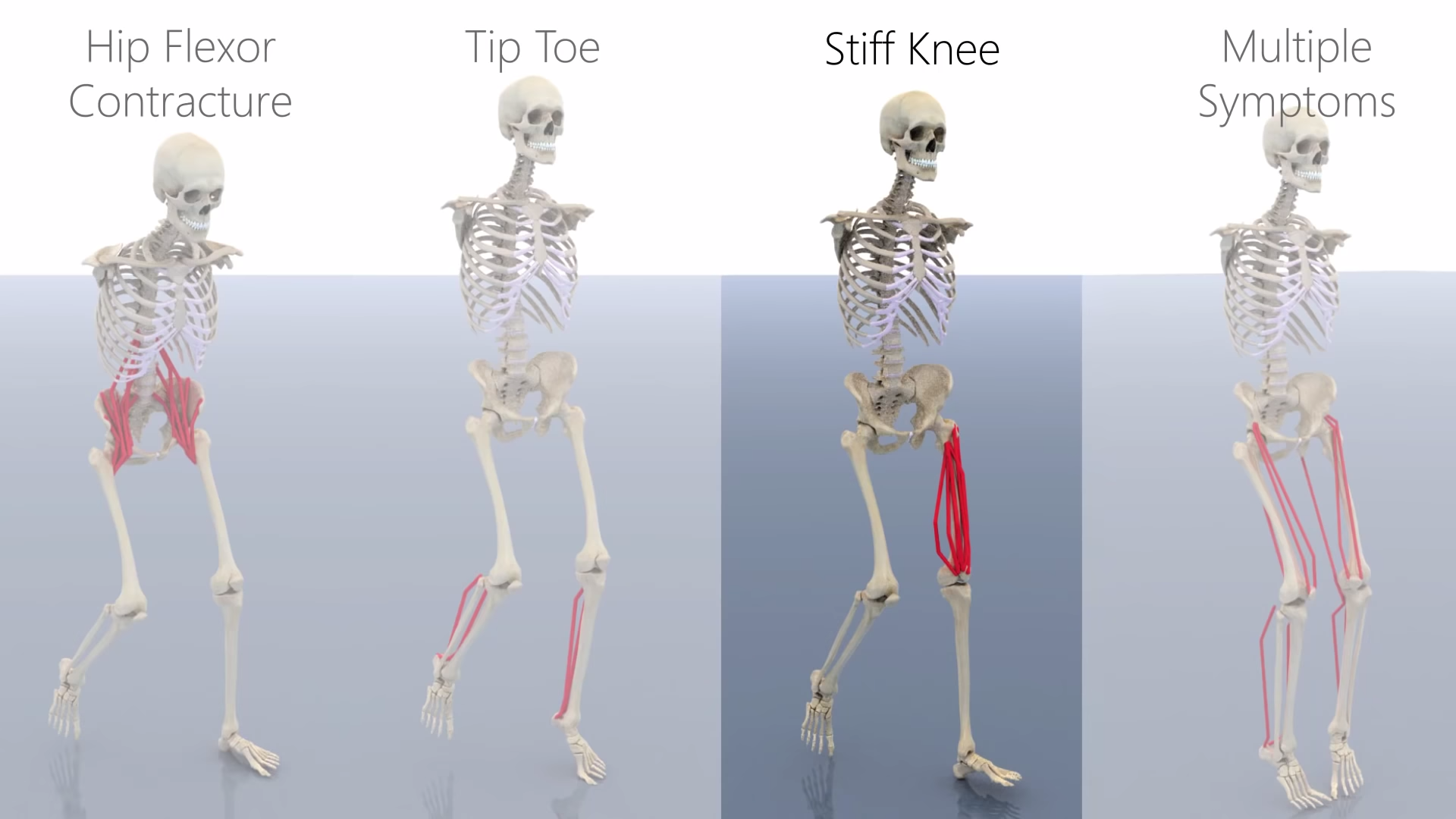
نستخدم نموذج العضلات هيل ، وهو المعيار الفعلي في الميكانيكا الحيوية. لدينا خوارزمية مرنة للغاية ، لذلك يمكن تضمين أي نموذج ديناميكي لتقلص العضلات في ذلك. يتيح لك استخدام نموذج عضلي عالي الدقة توليد حركات بشرية في ظروف مختلفة ، بما في ذلك علم الأمراض والأطراف الاصطناعية وما إلى ذلك.
 العضلة المستقيمة الفخذية. شبكة سطح ثلاثية الأبعاد (يسار). تقريب مع نقاط الطريق (وسط). إحداثيات LBS التقريبية لنقاط الطريق عند ثني الركبة (يمين).
العضلة المستقيمة الفخذية. شبكة سطح ثلاثية الأبعاد (يسار). تقريب مع نقاط الطريق (وسط). إحداثيات LBS التقريبية لنقاط الطريق عند ثني الركبة (يمين).باستخدام التعلم التعزيز العميق (DRL)
إننا نشارك نفس الفكرة الأساسية مع بحث حركة Deepmind ، والذي يعتمد على نموذج العصا والحركية. من المثير للدهشة ، أن خوارزمية DRL القياسية تعمل بشكل جيد مع طراز العصا والحركية ، لكنها لا تعمل بشكل جيد مع النماذج الميكانيكية الحيوية التي تحركها العضلات.
في معرض NeurlPS 2018 الأخير ، كان هناك تحدٍ
لمنظمة العفو الدولية للأطراف الصناعية . في النموذج التنافسي لا يوجد سوى 20 + عضلة ، ولكن حتى بالنسبة للفائز ، فإن النتيجة لا تبدو أفضل.
يوضح هذا المثال صعوبة تعلم النماذج التي تحركها العضلات. نموذجنا الهرمي يحقق طفرة ويسمح لنا بتطبيق DRL على نموذج ميكانيكي حيوي لشخص لديه عدد كبير من العضلات.
مشروع في
PDF .
مشروع على
جيثب .
استكشاف الموضوع: جيهي لي ، سيونغوان لي ، كيونغمين لي ومتنزه مونسيوك.