لا يزال يتم جمع العديد من أنواع النباتات والمحاصيل باليد فقط.
ابتكر مهندسون من جامعة كامبريدج (بريطانيا العظمى) نموذجًا أوليًا لجهاز الحصاد الآلي الذي يمكنه التعرف بشكل مستقل على رؤوس الخس السليمة الجاهزة للتقطيع ، فضلاً عن معالجتها وجمعها بدقة.
لجمع محصول جيد في الوضع التلقائي ، تحتاج إلى حل العديد من المشكلات التكنولوجية المعقدة ، مثل:
- تحديد المواقع بدقة وصحيح في مكان التجمع ، وتزامن الإجراءات مع جامعي آخرين ؛
- تحليل واختيار الخوارزميات الصحيحة للاستخدام مع الثقافات المختلفة ؛
- التعرف على الفواكه الناضجة (الأوراق ، التوت) ؛
- التخلص من العناصر التالفة أو غير المنوية ؛
- الاستيلاء والقطع الدقيقين للمحاصيل الجاهزة للحصاد دون ضرر ؛
- فرز وتكديس المحاصيل المحصودة ؛
- تسجيل العمل والقدرة على التعلم الذاتي.
- التحقق من صحة الإجراءات الحالية وتقليل الأضرار التي لحقت بموقع التجميع.
بالإضافة إلى ذلك ، من الضروري القيام بكل هذه المهام بسرعة عالية وفي ظروف حقيقية دائمة التغير في العالم المحيط (الرياح والأمطار والحشرات والحيوانات وما إلى ذلك).
نجحت مجموعة من المهندسين في جامعة كامبريدج في حل بعض هذه المشكلات بنجاح ونشروا أبحاثهم في هذا العمل:
رابط لمقال علمي في
مجلة الروبوتات الميدانية .
لقد ابتكروا نموذجًا صغيرًا صغيرًا ومستقلًا إلى حد بعيد عن حصاد آلي مستقل ، قادر على تحليل واختيار العناصر المناسبة للحصاد.
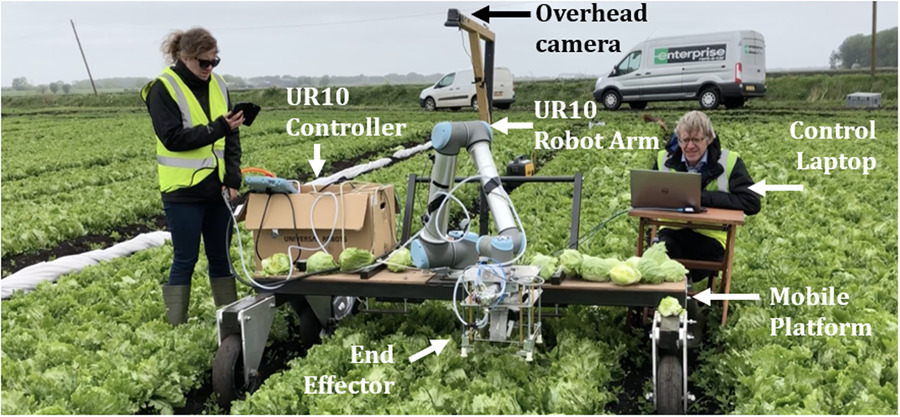
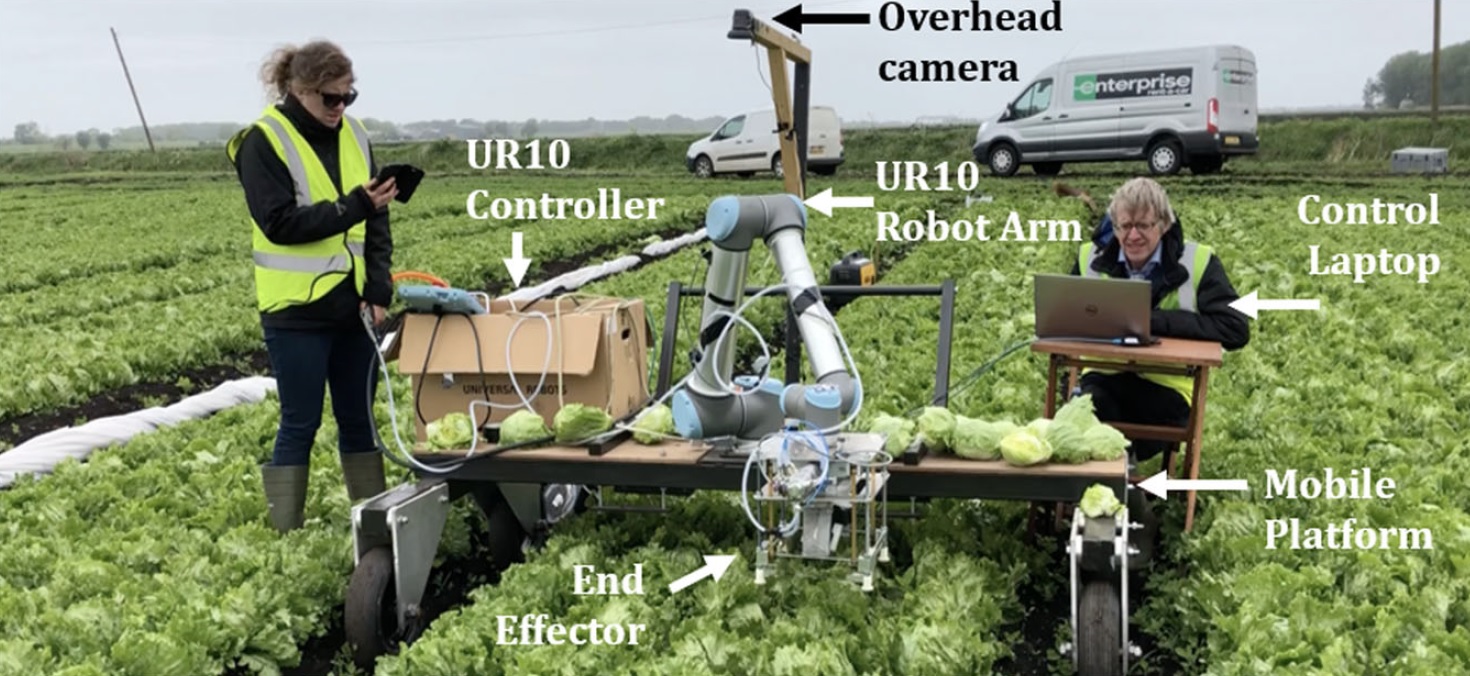
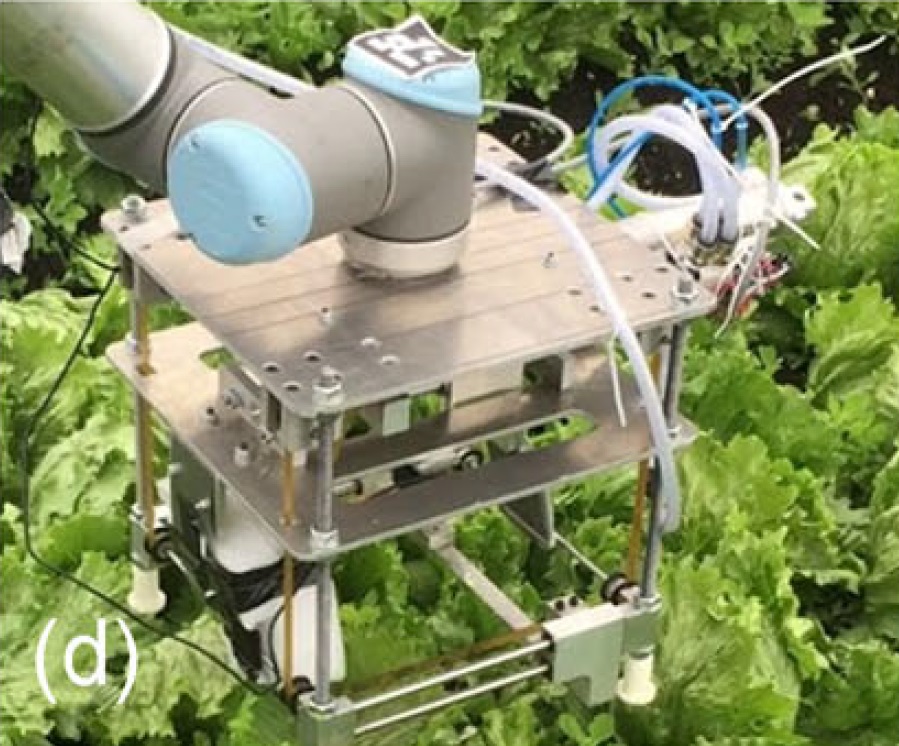
جهاز تجميع الروبوت هذا عبارة عن مناور على منصة بعجلات بعرض سرير واحد. تم تجهيز مناور مع قبضة وسكين لقطع وكاميرا فيديو ، وتقع كاميرا فيديو إضافية في الجزء العلوي من النظام الأساسي لها.
نظرًا لأن هذا هو مجرد نموذج أولي ، والذي سيتم تحسينه للاستخدام الشامل بشكل كبير سواء من الناحية الوظيفية أو الوظيفية ، قام المهندسون ببساطة بتثبيت جميع مكونات الروبوت التي يحتاجونها لإجراء اختبارات ميدانية على منصة بعجلات سلبية ، يتم نقلها يدويًا بواسطة المشغل.
كانت مهمتهم هي تعليم الروبوت لفهم عملية الحصاد وأتمتة أفعاله باستخدام التعلم الآلي.
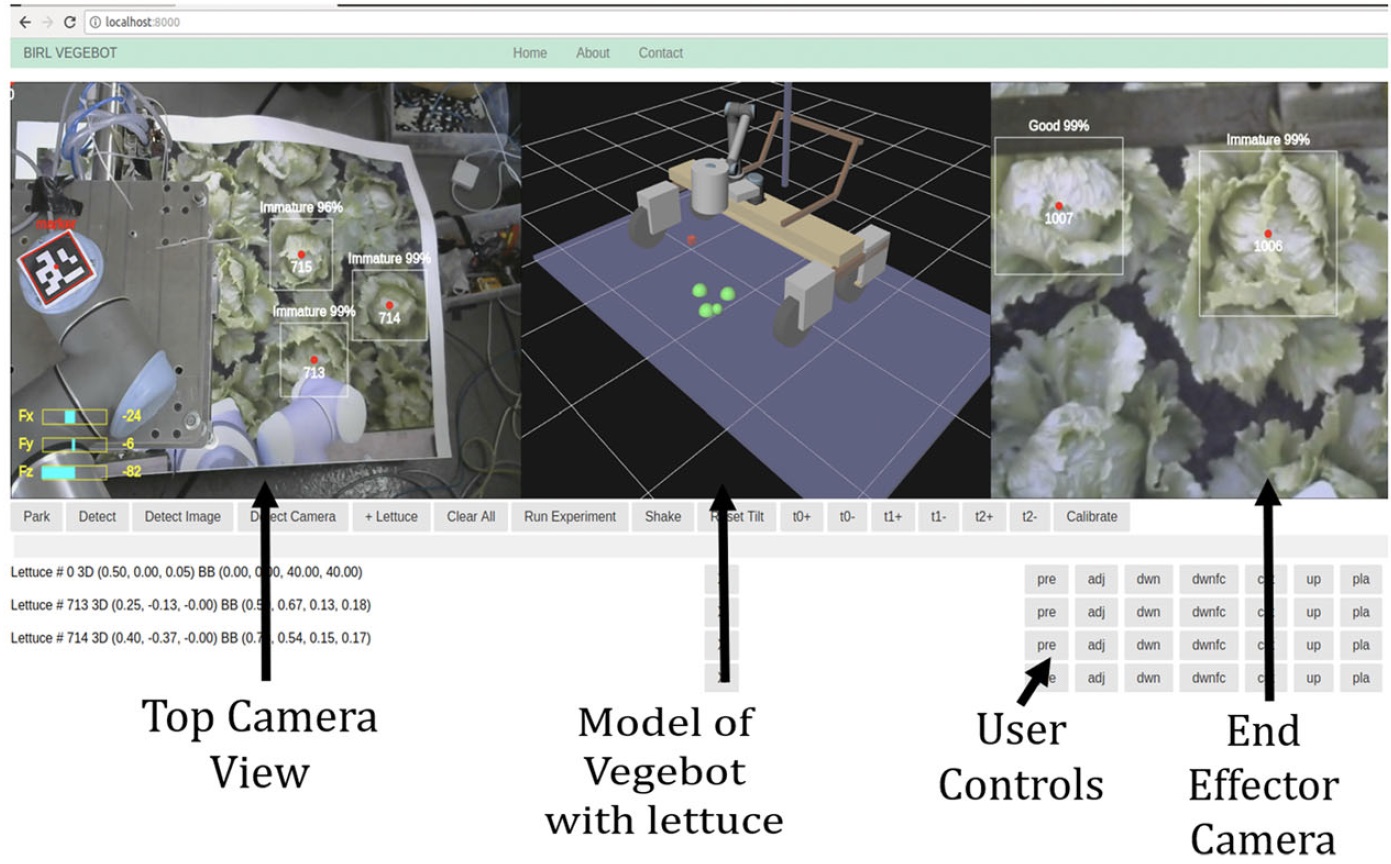
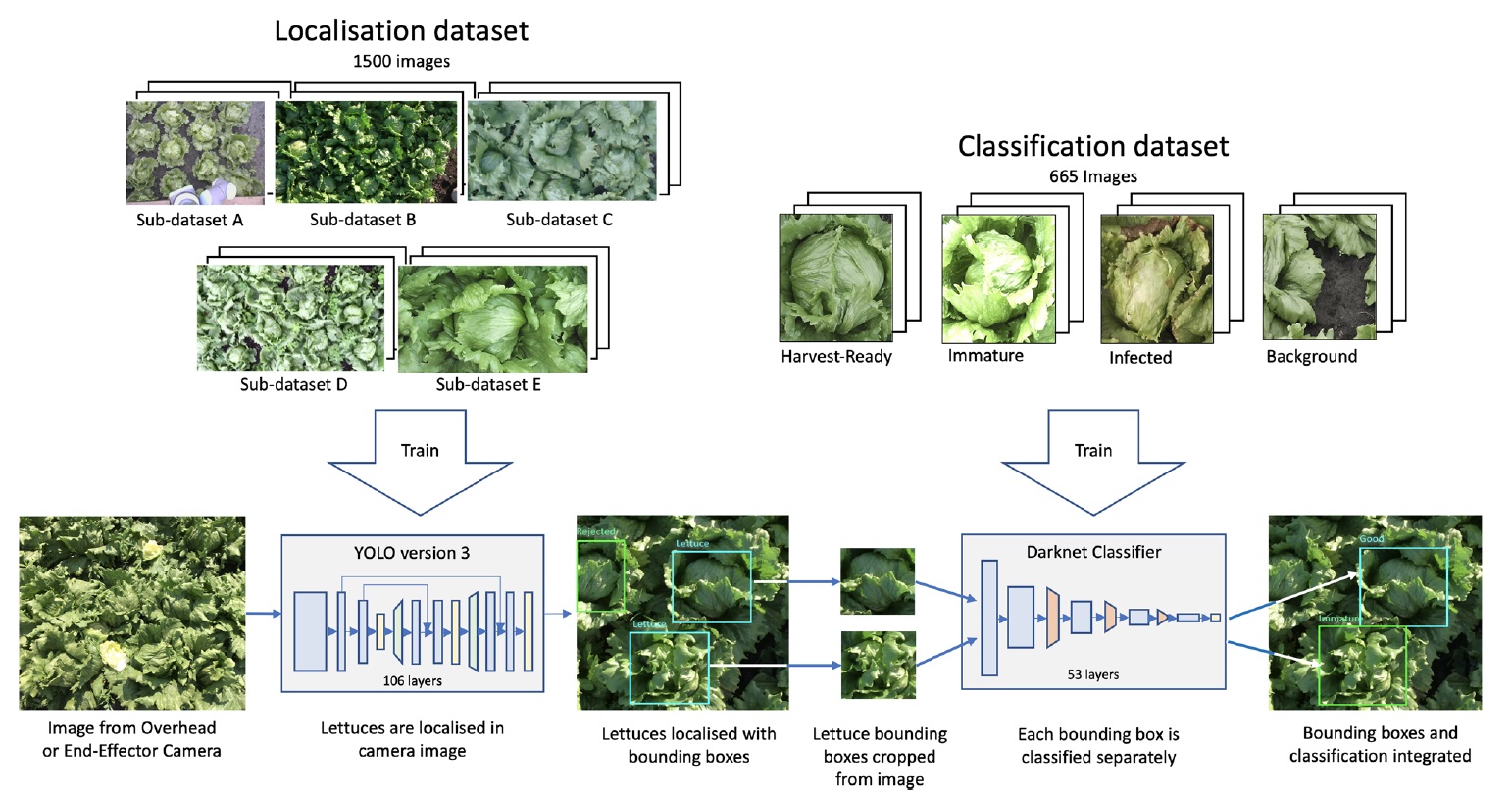
بعد أن انتهى الروبوت من رؤوس الخس الجديدة ، يتم تنشيط عملية التعرف على رؤوس الخس وتصنيفها باستخدام كاميرات الفيديو والشبكات العصبية.
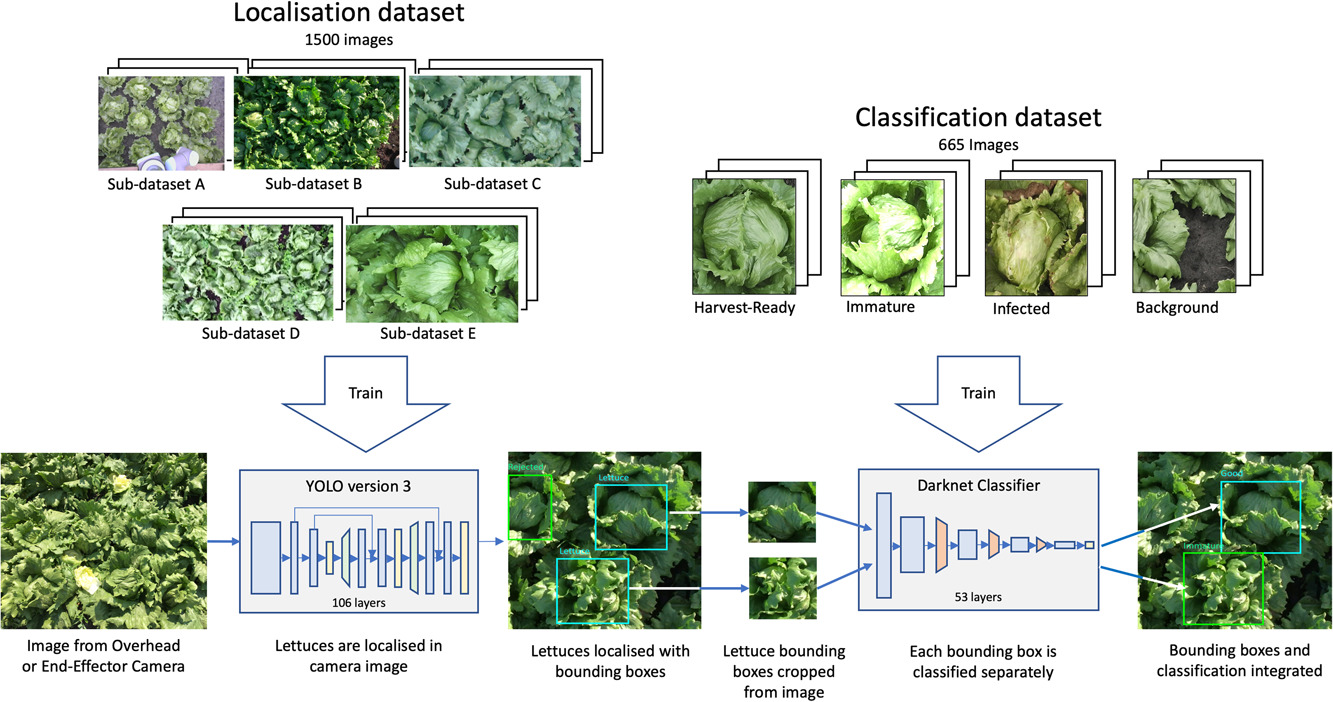
تم استخدام صور من كاميرات الفيديو على المعالج والمنصة من أجل:
- توطين رؤوس الخس أمام كاميرا الفيديو - باستخدام الإصدار 3 من الشبكة العصبية التلافيفية YOLO ، لتدريب 1500 صورة تم استخدامها ؛
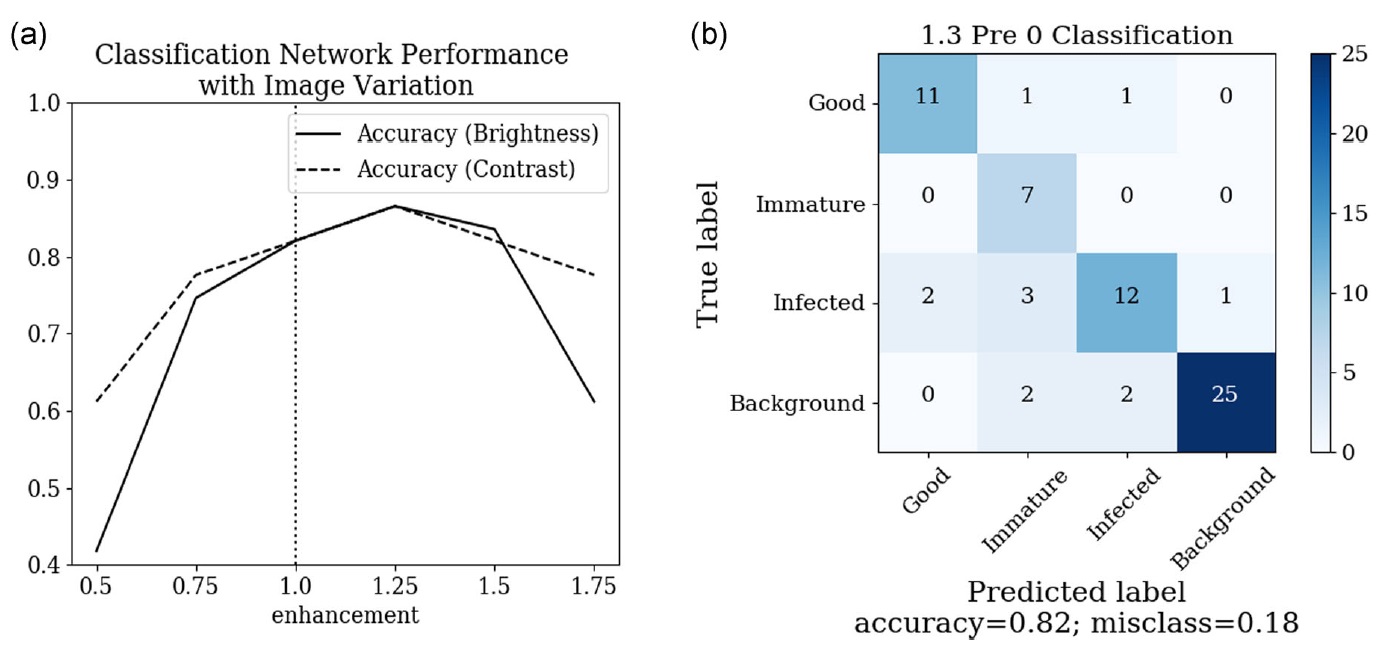
- تصنيف رؤوس الخس حسب أربعة أنواع (عنصر ناضج ، عنصر غير ناضج ، عنصر مصاب / تالف ، نقص عنصر) باستخدام الشبكة العصبية الملتوية لشبكة Darknet Object Classification ، حيث تم استخدام 665 صورة فوتوغرافية.
أظهرت التجارب الميدانية لروبوت التجميع أنه قادر على:
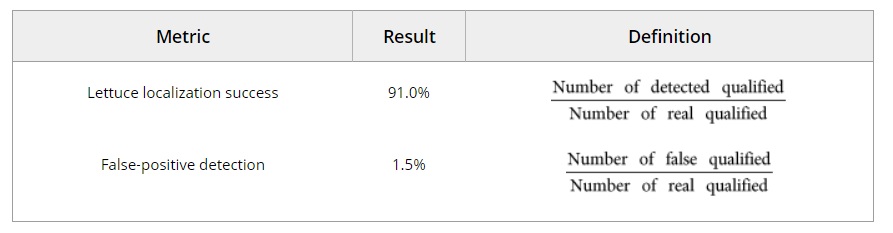
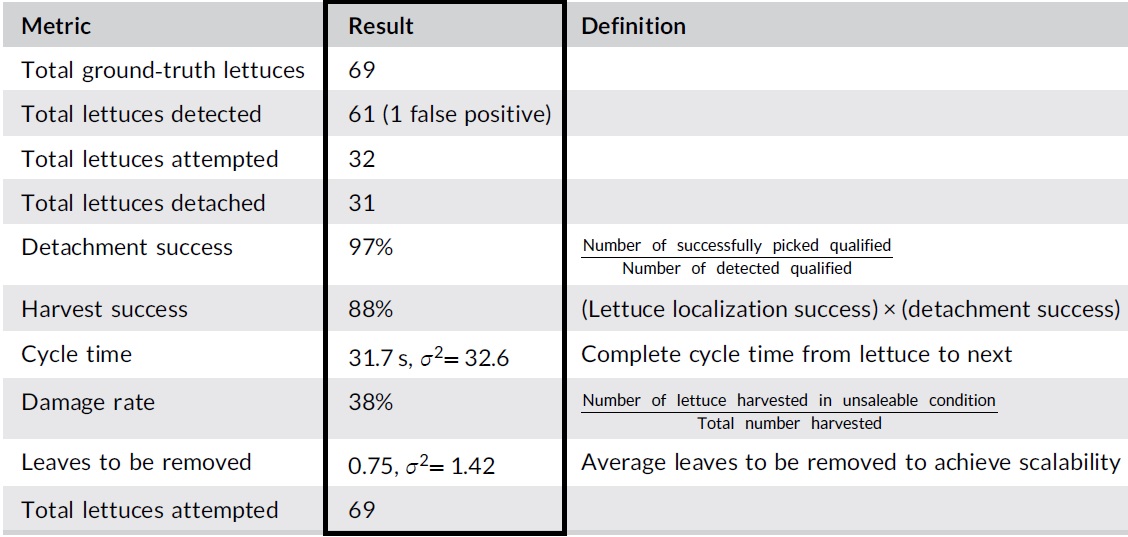
- تحديد رؤساء السلطة أمامك بدقة 91 ٪ ؛
- يصنف بشكل صحيح رؤوس الخس بدقة 85٪.
- تبلغ مدة دورة العمل (الانتقال من رأس الخس إلى الآخر) 32 ثانية ، وهذا كثير ، لكن هذه اللحظة ستستمر في صيغتها النهائية.
اتضح أن الأسرة نفسها متضخمة للغاية وإنبات رؤوس الخس يصعب للغاية توطينه وتصنيفه:

لذلك ، تتم إزالة السلطة يدويًا بسرعة ، ولكن كل ذلك في صف واحد دون تحديد خاص ودقيق:

ومن الصعب إنشاء منصة صغيرة مع منظف آلي ، لأن الجهاز يجب أن يكون متحركًا ، ويحافظ على ثبات كافٍ على السطح على أرض فضفاضة ولا يدمر الأسرة بمكوناته.
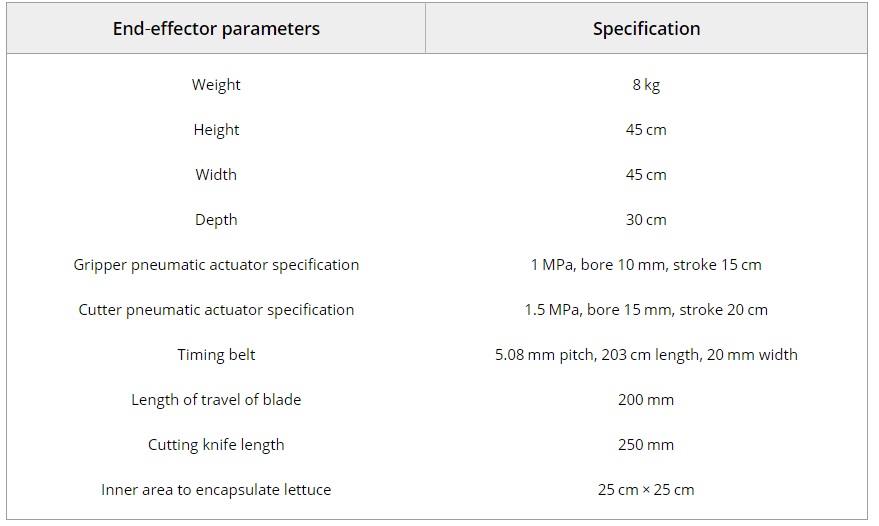
فيما يلي قيود الحجم للعناصر ومعلمات روبوت تجميع النموذج الأولي:
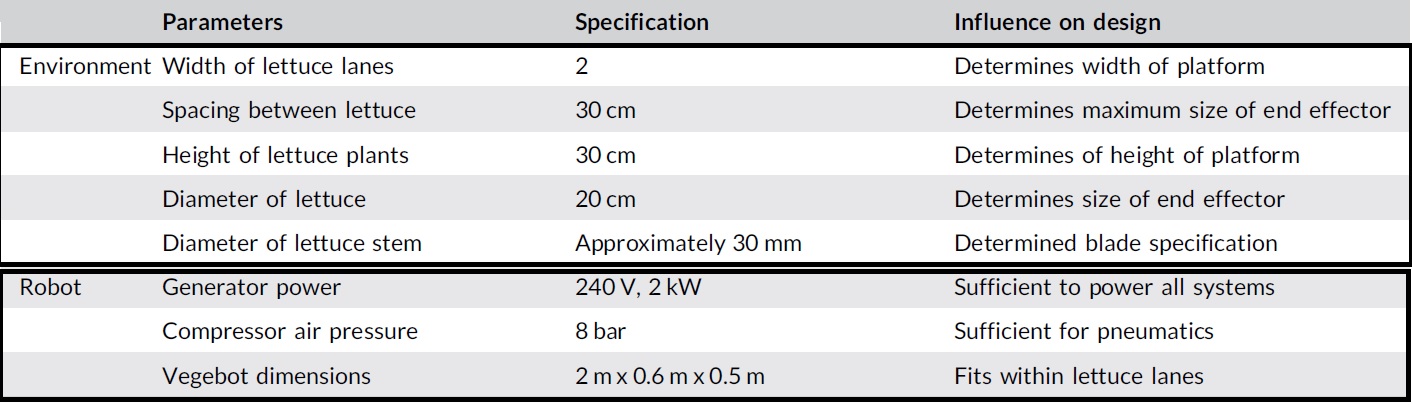
ماذا حدث كنتيجة للتجارب الميدانية بعد تجميعها:
بالمناسبة ، كان يسمى منصة مع الروبوت
Vegebot .
مخطط كتلة للتوصيل البيني لمكونات منصة Vegebot:
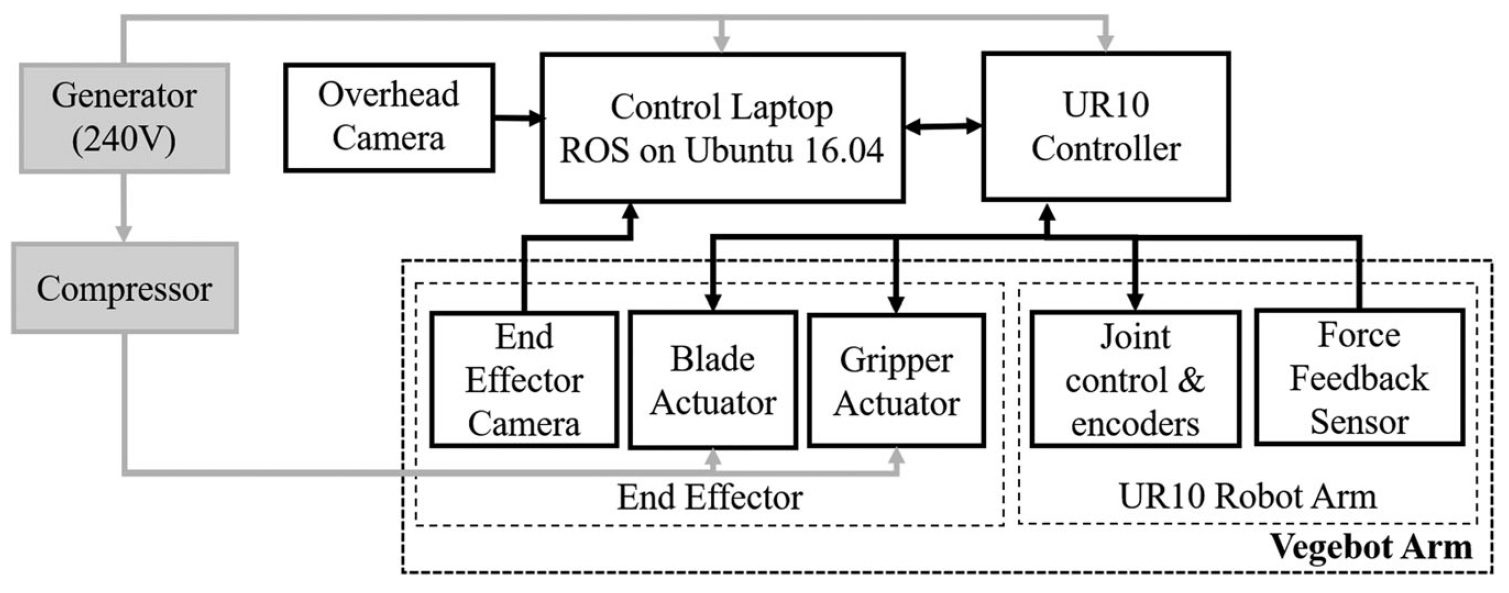
علاوة على ذلك ، فإن كلتا الكاميرتين في هذا الحل هما أبسط وأرخص كاميرات الويب.
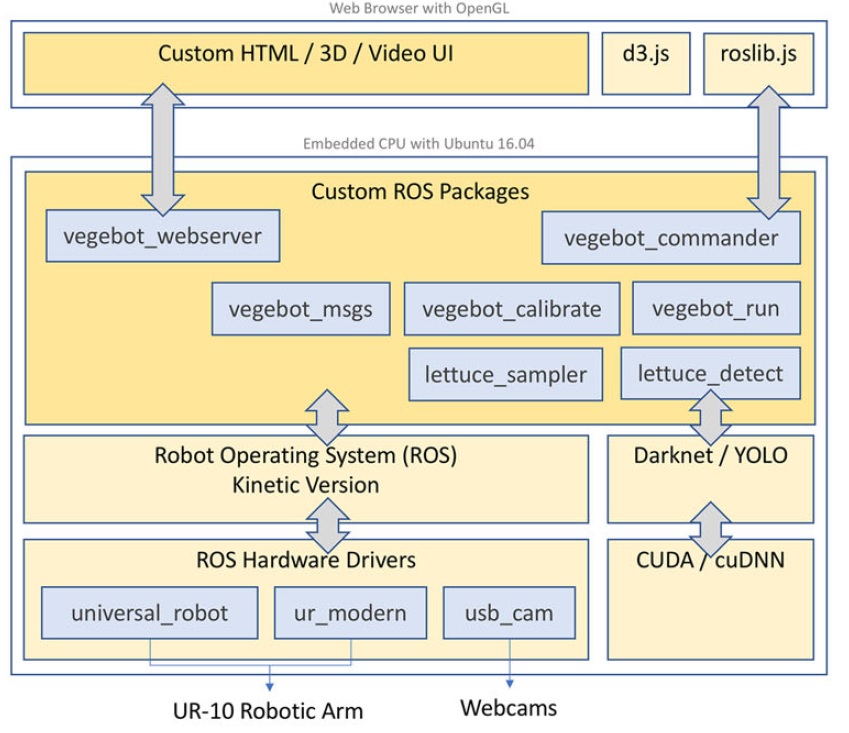
جزء برنامج Vegebot (الهندسة المعمارية وواجهة الويب) ، يستخدمه نظام التشغيل Robot (ROS):
الرسوم البيانية لدورة العمل فيجيبوت (التدريب ، دورات الجمع):

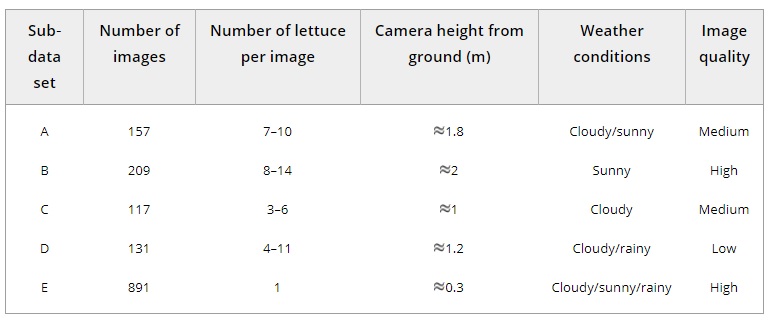
التحضير للتجارب الميدانية ، ودراسة الأسرة وتحليل رؤوس الخس من ارتفاعات مختلفة للكاميرا:

ولكن ما حزام الرباط لجهاز كمبيوتر محمول! الهندسة والدهاء في الأعمال!

جدول مع أنواع مختلفة من الصور لتوطين رؤوس الخس أمام كاميرا الفيديو (لتدريب الشبكة العصبية التلافيفية YOLO الإصدار 3):
جدول مع أنواع مختلفة من الصور لتصنيف رؤوس الخس حسب أربعة أنواع (عنصر ناضج ، عنصر غير ناضج ، عنصر مصاب ، نقص عنصر) لتدريب الشبكة العصبية التلافيفية Darknet Object Classification Network:

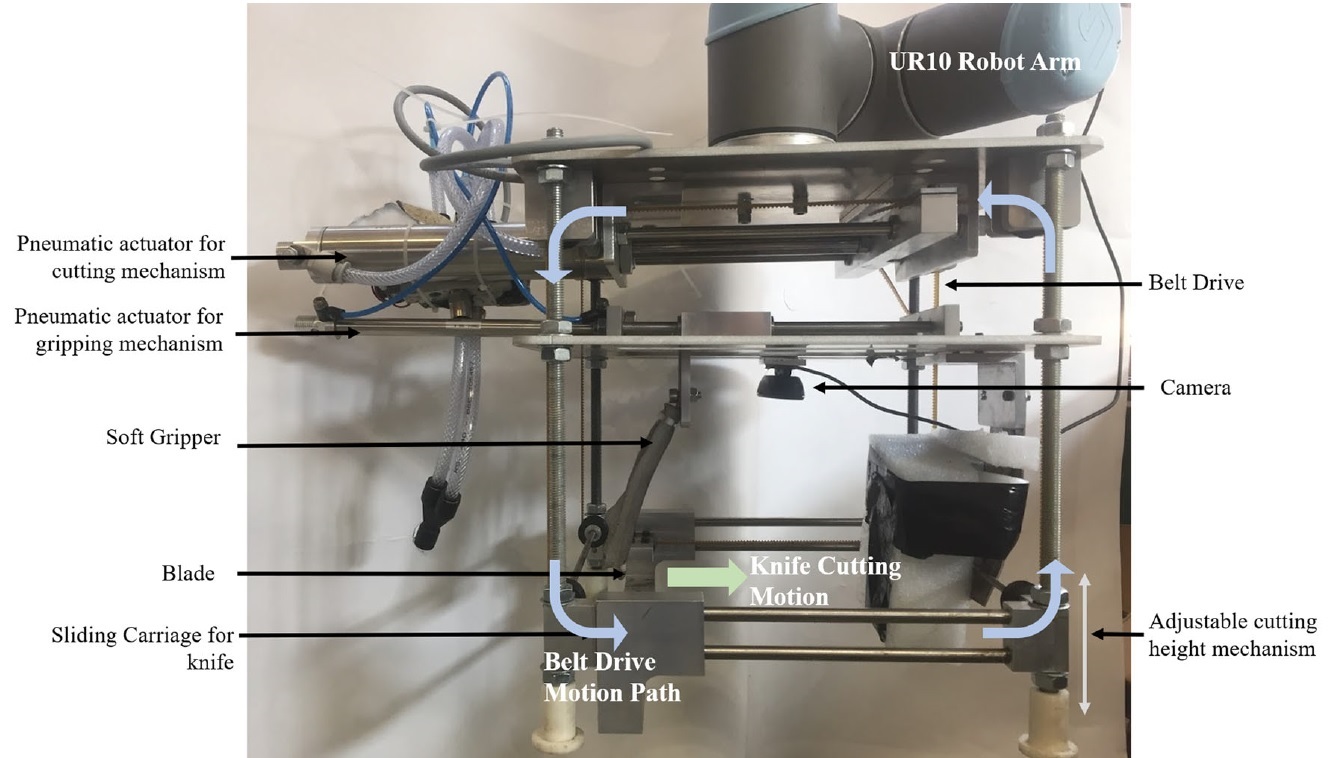
آليات الخيارات الوسيطة والعناصر Vegebot:

رأس مزدوج لجمع رؤساء السلطة (الاستيلاء والسكين):

محرك دوار DC (يسار) ، محرك خطي مع آلية سكين (يمين):

القاطع الهوائية:
الإصدار النهائي من آلية الالتقاط والحصاد مع محرك الحزام ونظام محرك هوائي مزدوج:
ميزات وأبعاد القابض Vegebot:
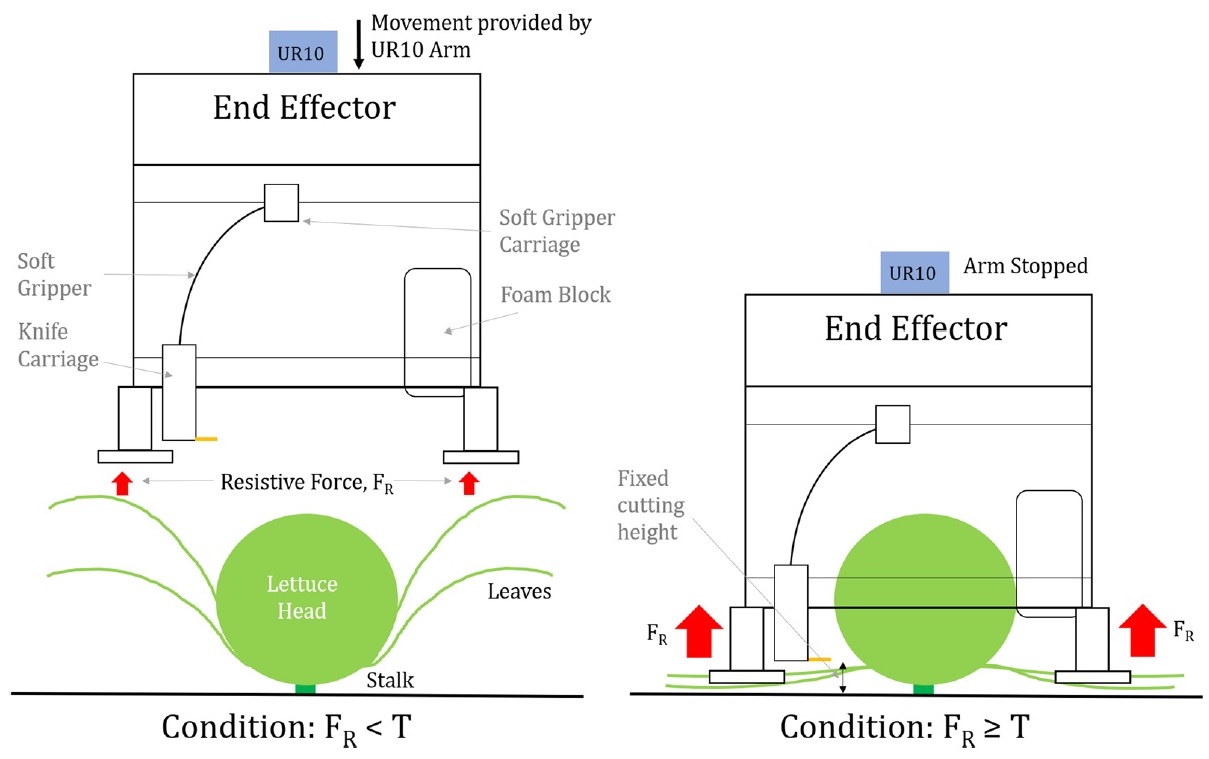
مبدأ تشغيل آلية الالتقاط Vegebot (T- قوة عتبة ، FR - قوات رد فعل الأرض):
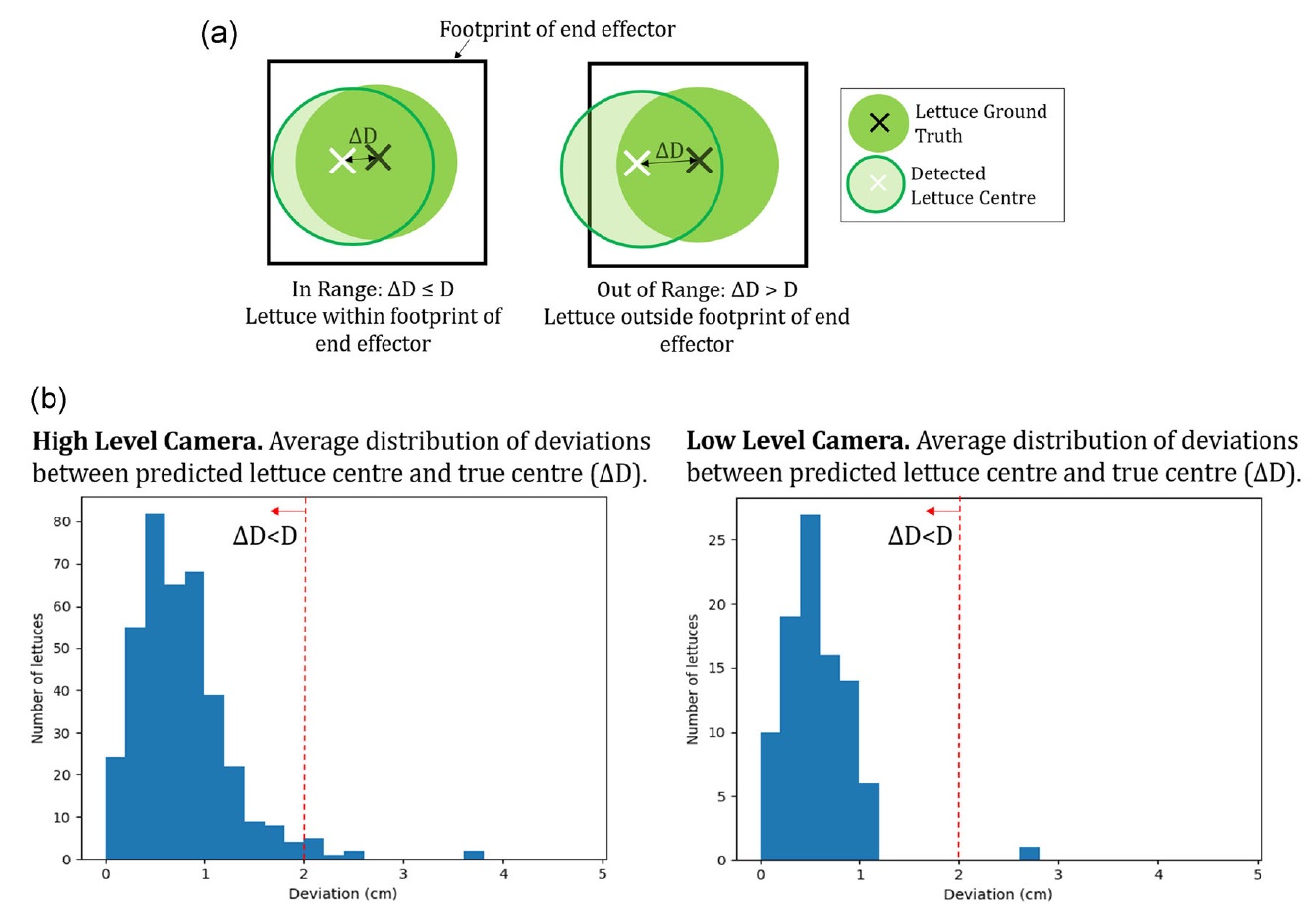
وضع آلية الالتقاط Vegebot باستخدام كاميرتين على متن الطائرة:
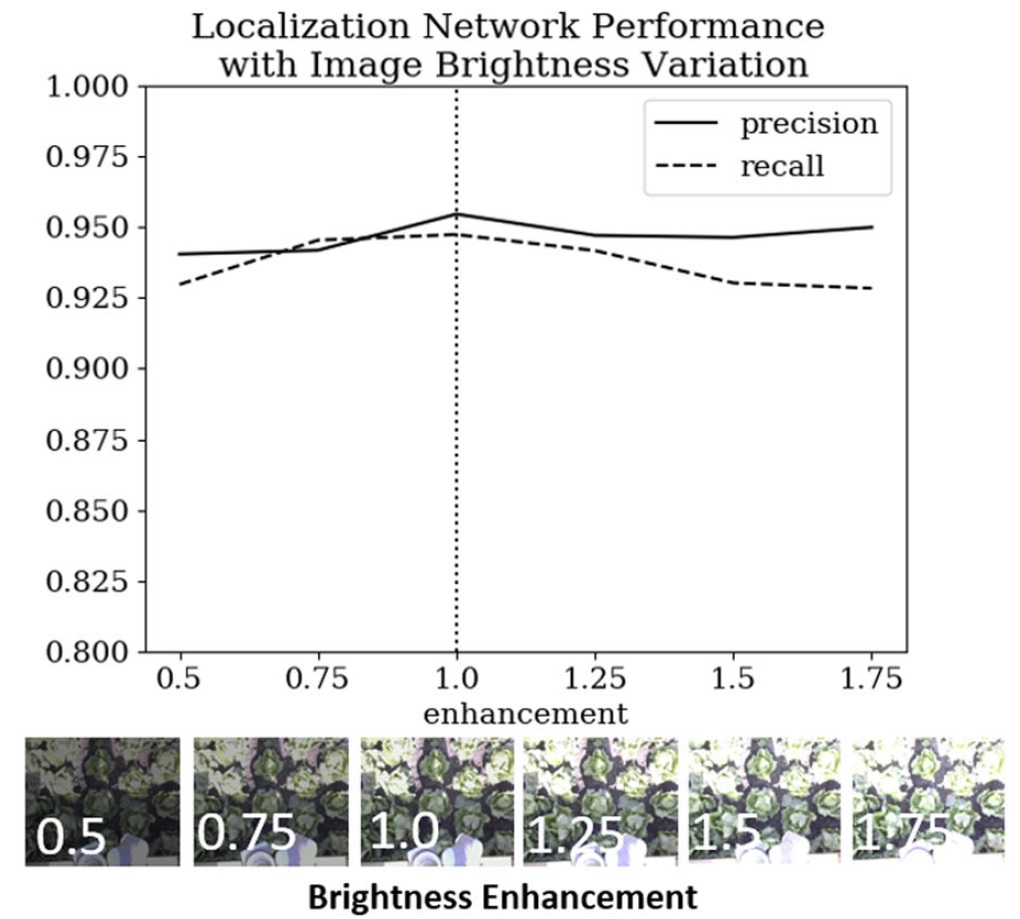
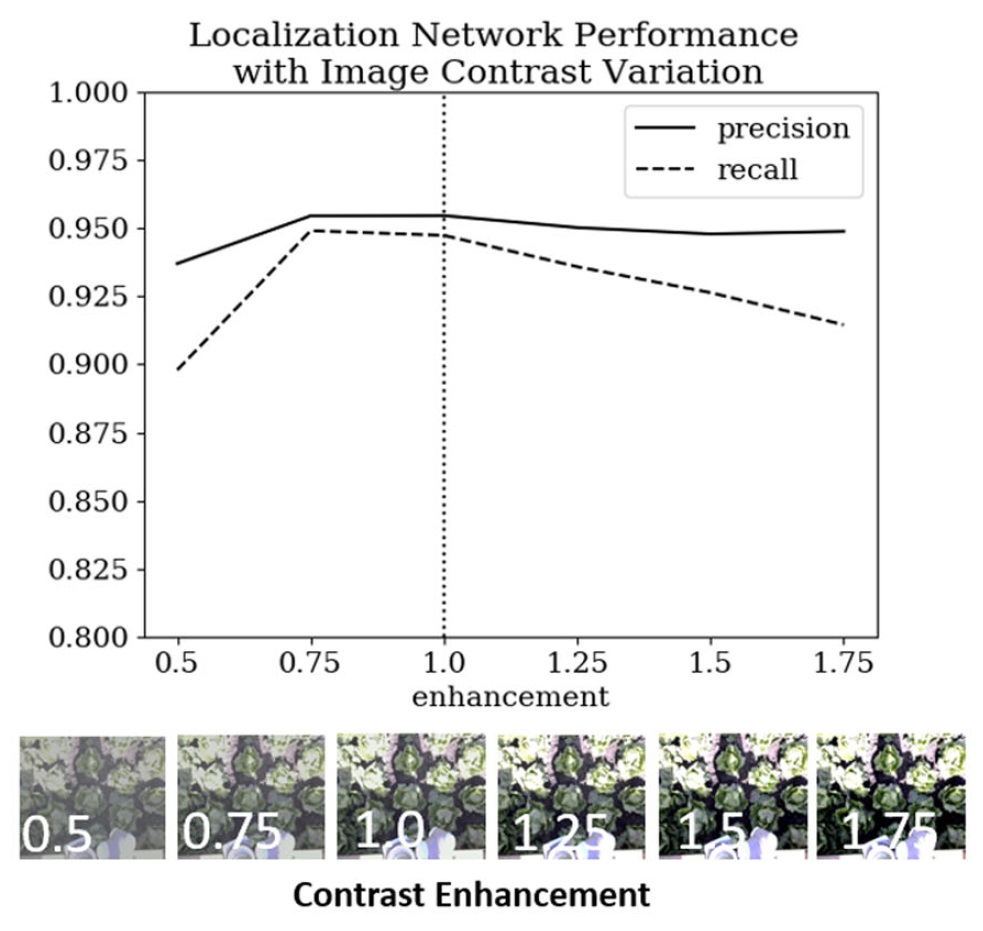
تعويض عوامل الإضاءة الخارجية ومعلمات الصورة من كاميرات الفيديو لتحقيق التوطين الأمثل لرؤساء الخس:
أمثلة لتعريب (التعرف) على رؤوس الخس على صور من كاميرات الفيديو على ارتفاعات مختلفة وفي زوايا مختلفة:
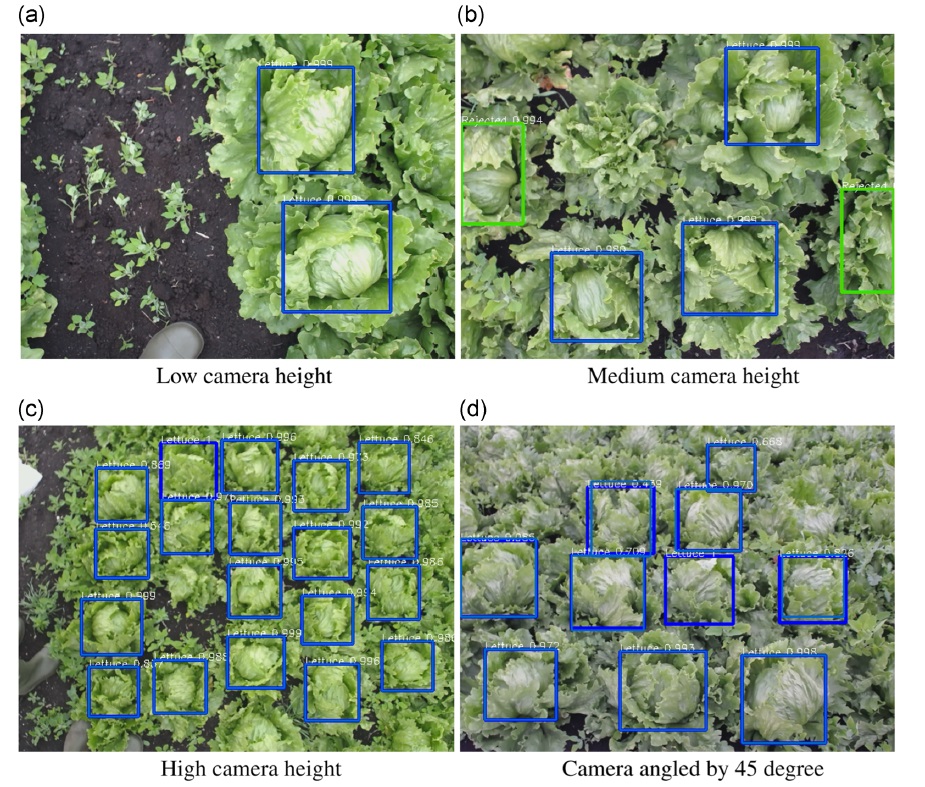
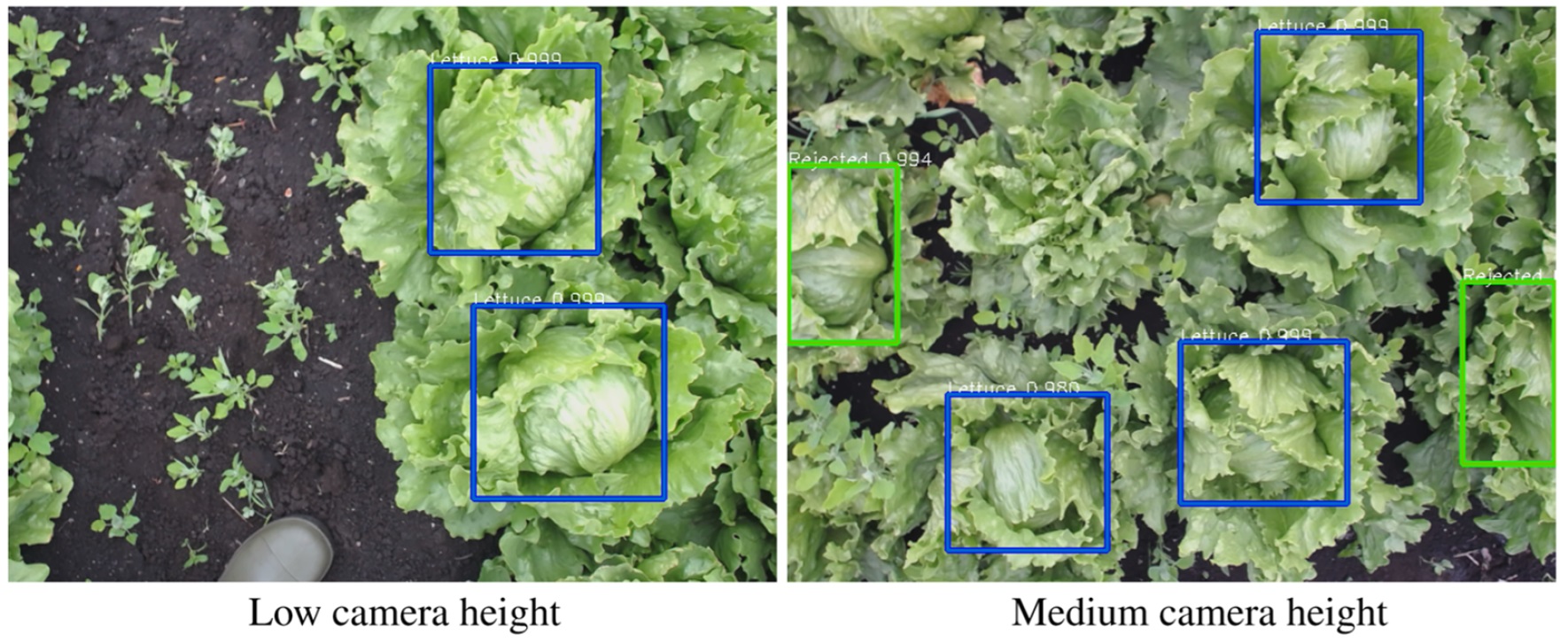
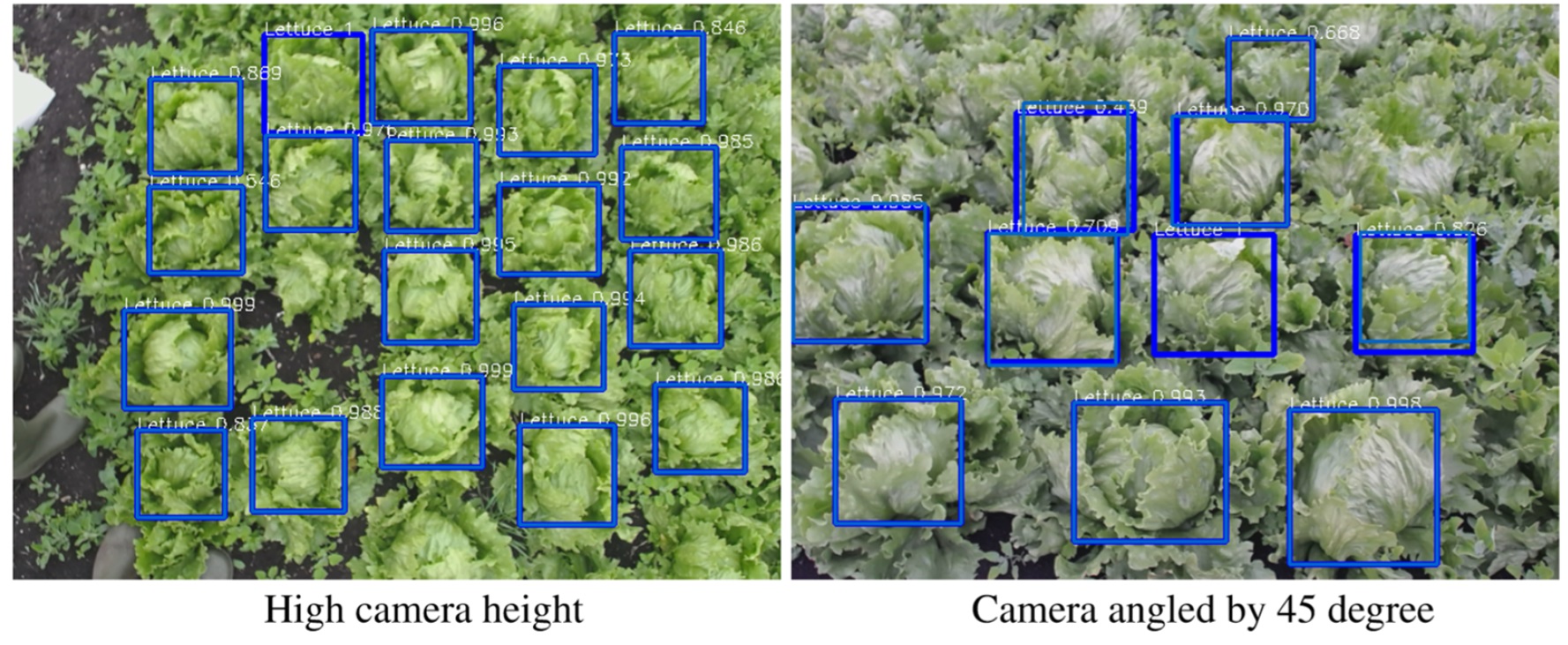
تم الحصول على بيانات ميدانية حول توطين (التعرف) لرؤساء الخس باستخدام Vegebot (استنادًا إلى 60 محاولة من Vegebot للتعرف على رأس الخس):
معلمات الصورة ومصفوفة لتصنيف رؤوس الخس:
وقت التشغيل ومسارات آلية التقاط Vegebot:
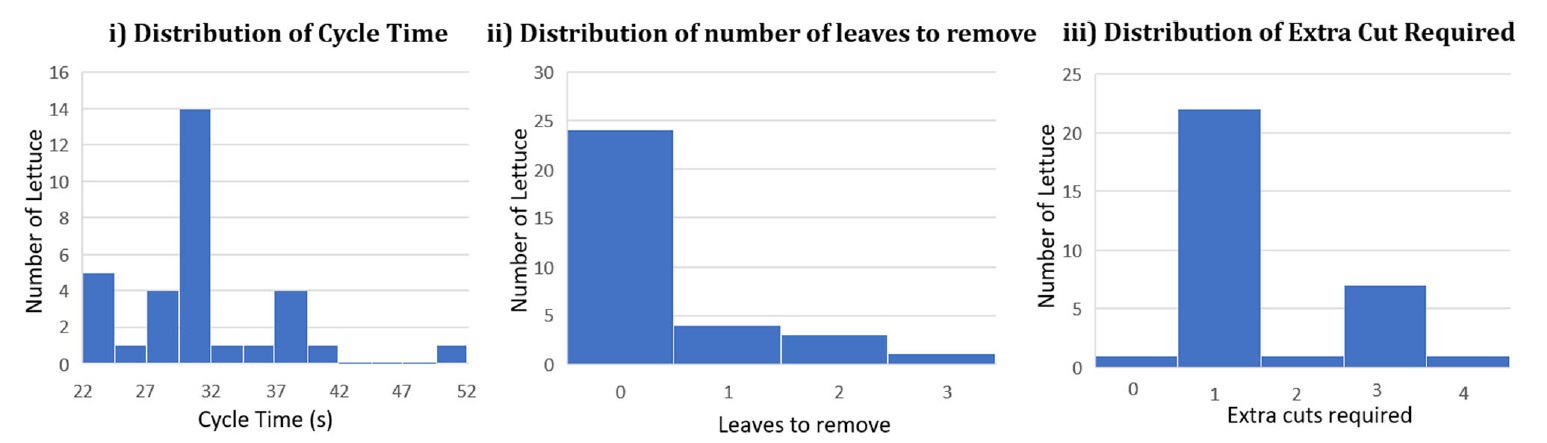
كانت هناك مشكلة في عملية إجراء تجارب ميدانية مع تحديد عدد الأوراق غير الضرورية (الشائكة) على رأس الخس بعد التجميع ، والتي يجب إزالتها.
فيما يلي بعض الخيارات: سلطة خس مقطّعة تمامًا بدون أوراق شائكة ، سلطة خس مع ورقة شائكة واحدة ، سلطة خس بأوراق شائكة ، سلطة خس بأوراق تالفة.

اعتمادًا على كمية الأوراق الزائدة على رأس الخس والحاجة إلى التعرف عليها وإزالتها ، تتغير أيضًا دورة عمل Vegebot:
فيبوت حصاد روبوت نموذج الحقل مجاميع ملخص:
بالطبع ، لا يزال هذا النموذج الأولي بعيدًا عن الاستخدام الزراعي الصناعي ، ولكن هذه ليست سوى بداية البحث.