ولادة مفهوم الواقع البعيد
بدأ تاريخ مشروعنا "المجنون" منذ ثلاث سنوات عندما قال صديقي ليشا أثناء التفكير في الآفاق المستقبلية لتطوير صناعة الألعاب: "تخيل مستقبلاً يدير فيه الأشخاص في شكل من أشكال الترفيه من أي جزء من العالم روبوتات حقيقية على أرض ألعاب مثل" تجسدات الآلهة. "

بدا لنا في البداية فكرة مثيرة للاهتمام وليس من الصعب تنفيذها. جلسنا على الفور بحثًا عن مشاريع مماثلة وفوجئنا عندما وجدنا أن أحداً لم يفعل شيئًا كهذا. بدا الأمر غريبًا ، لأن الفكرة كانت حرفيًا "على السطح". لقد وجدنا العديد من آثار مشاريع النماذج الأولية للهواة في شكل هيكل مع كاميرا قائمة على Arduino ، ولكن لم يأت أحد بأي مشروع إلى نهايته المنطقية. في وقت لاحق ، والتغلب على الصعوبات والمشاكل التي لا نهاية لها على ما يبدو ، فهمنا سبب عدم وجود نظائرها ، ولكن في البداية بدا الفكرة بسيطة للغاية وتنفيذها بسرعة لنا.
في الأسبوع المقبل كرسنا لتطوير هذا المفهوم. لقد تخيلنا العشرات من أنواع الروبوتات ذات القدرات المختلفة ومئات من نطاقات الألعاب ، حيث يمكن للاعبين التنقل على الفور عبر "النقل الفضائي". أي شخص أراد ، على أساس "قرارنا" ، أتيحت له الفرصة لبناء ملعب تدريب خاص به بمقاييس مختلفة.
قررنا على الفور أن هذه الأفكار تتناسب أكثر مع مفهوم الجذب الترفيهي ، وليس لعبة الكمبيوتر. يحب الناس الترفيه ويريدون شيئًا جديدًا ، وقد عرفنا ما نقدمه لهم. كما هو الحال في أي عمل تجاري ، ظهرت مسألة الاسترداد على الفور ، لأنه يبدو للوهلة الأولى أن نموذجنا الفعلي مقيد بعدد الروبوتات. ولكن ضرب الروبوتات لمدة 24 ساعة وساعة من 5-10 دولارات ، اختفت الشكوك. النموذج المالي لم يكن كلوندايك ، لكنه كان يؤتي ثماره حتى عند تحميل بنسبة 10 ٪.
بسرعة كبيرة ، ظهر اسم مفهوم جديد في رأينا: الواقع عن بعد ، عن طريق القياس مع الواقع الافتراضي والواقع المعزز.

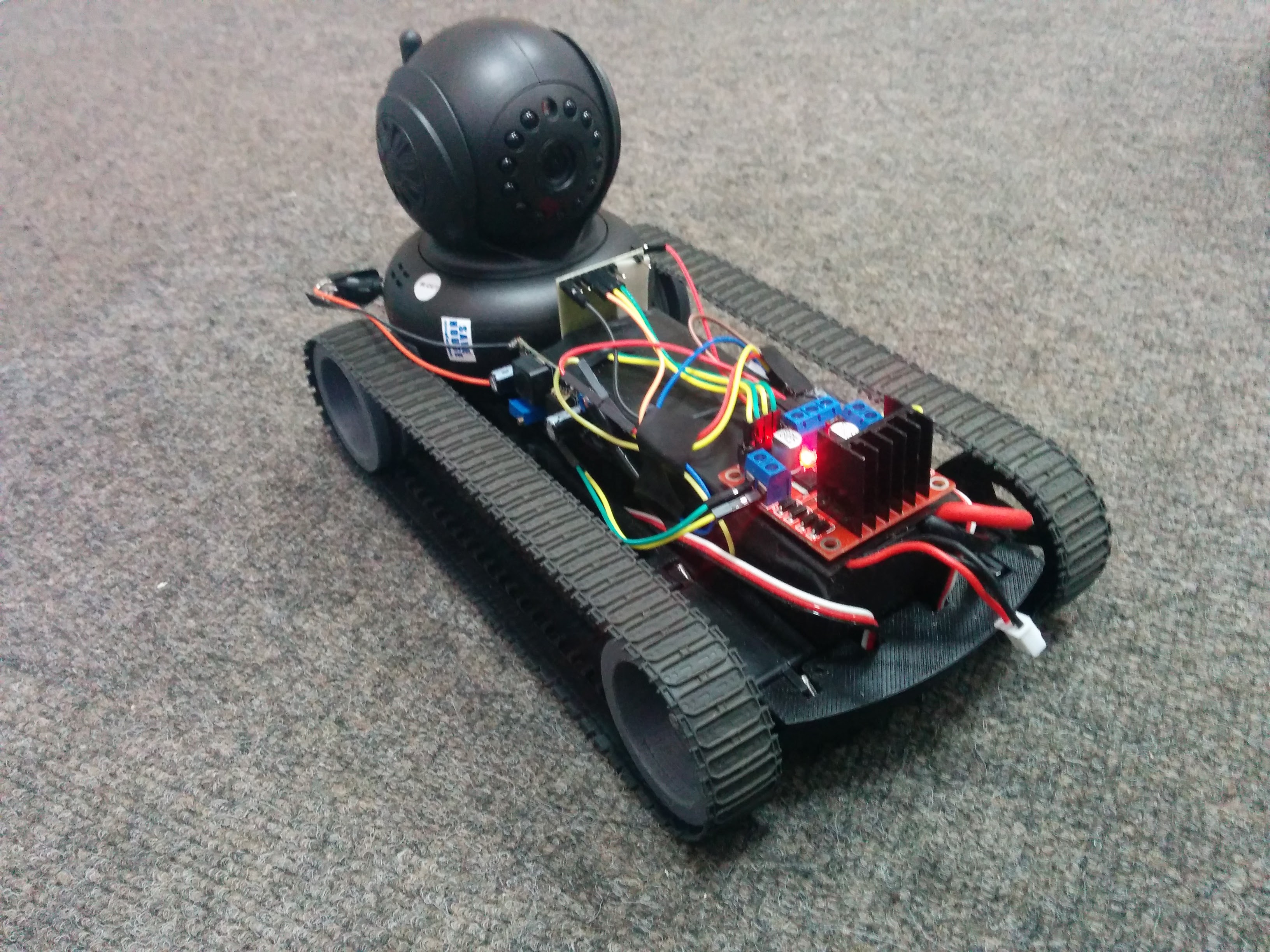
مثل بقية "المجربين" ، أولاً وقبل كل شيء ، أخذنا الجهاز على جهاز التحكم عن بعد ، ووضعنا كاميرا Wi-Fi صينية عليه ، وقمنا بتثبيت لوحة Arduino وذهب الروبوت الخاص بنا "." لقد طلبنا من صديقنا من الولايات المتحدة الأمريكية الاتصال بالآلة الكاتبة عبر الإنترنت. كان قادراً على ركوب مكتبنا وكنا سعداء. التأخير في التحكم ودفق الفيديو في بضع ثوان لا يبدو لنا مشكلة.
من هذه اللحظة ، قمنا بتقسيم عملنا إلى مجالين:
- النمذجة وبناء الملعب
- تطوير وإنشاء الروبوتات وأنظمة التحكم
جليفر في مدينة بريبيات
سأبدأ قصتي بأرض تدريب. لقد فهمنا أن على الناس اللعب في مكان ما. يجب أن يكون المكان مشهورًا عالميًا و "غامضًا" وغير معقد في التنفيذ التقني. من خلال العديد من الخيارات ، توصلنا فجأة إلى فكرة تشيرنوبيل. استوفت منطقة تشيرنوبيل جميع متطلباتنا ، والأهم من ذلك ، أن جميع الأعطال المستقبلية المحتملة والأضرار التي لحقت بملعب الأرض يمكن أن تعزى إلى وظيفة نهاية العالم.
بعد أن وجدنا غرفة بمساحة 200 متر مربع ، بدأنا العمل ، واستمر العمل لمدة عامين. لقد رسمنا شوارع المنازل وأنسجةها ، وصممنا نماذج ثلاثية الأبعاد للمباني ، بما في ذلك الأرضيات الداخلية. ثم قاموا بقطع كل شيء عن الحبيبات والخشب الرقائقي والمباني المجمعة من مئات الأجزاء المختلفة.

حاولنا إعادة إنشاء ، بكل دقة ممكنة ، جميع مواد Pripyat ، "التجسس" على خرائط جوجل. بالطبع ، لم يسمح لنا حجم الغرفة بإنشاء كل شيء تمامًا ، ولم نرغب في تفويت التفاصيل ، لذلك ، على سبيل المثال ، اضطررنا إلى نقل Chernobyl NPP أقرب إلى Pripyat.
من الصعب حساب عدد المئات من الألواح وعشرات الألواح من الخشب الرقائقي والألواح الليفية وغيرها من "المواد الاستهلاكية" التي قضيناها. خلال الأشهر الثلاثة الماضية ، قمنا بالزحف حرفيًا في جميع الفروع الأربعة باستخدام الفرش والدهانات والمنازل والديكور والأرضيات. أردنا أقصى قدر من التفاصيل. اتضح أن حجم المدينة كان 1:16 وكانت المنازل المكونة من 9 طوابق مرتفعة تقريبًا على مستوى صندوق الكبار. يجري في هذه المدينة شعرنا وكأننا عمالقة حقيقية.

قليلا عنا
ثم ربما حان الوقت للحديث عن فريقنا. في البداية ، كان لدينا اثنين فقط من أصدقاء المهندسين. بالتفكير في المشروع ، فهمنا أنه سيكون من الصعب العثور على مستثمر لهذه الفكرة "المغامرة" وقررنا أن نفعل كل شيء من أجل أموالنا. خلال العمل ، ساعدنا الكثير من الناس. شخص حر ، شخص استأجرناه للمساعدة.

ومن الأمثلة الجيدة على العمل الجماعي قصة الطباعة ثلاثية الأبعاد. قمنا بتجميع الطابعة الخاصة بنا وطبعنا الأجزاء لأول مرة بمفردنا ، حتى توصلنا إلى نتيجة مفادها أنه لا يمكنك أن تكون متخصصًا في كل شيء. استغرقتنا الطباعة كثيرًا من الوقت ، وكانت أجزاء من الأجزاء كبيرة وزواجًا غير متوقع في نهاية طباعة أجزاء مدللة جميع خططنا. ونتيجة لذلك ، وجدنا أخصائيًا في الطباعة ثلاثية الأبعاد "ضيق" أصبح لاحقًا جزءًا من فريقنا. بعد أن شاركنا أحلامنا ، ساعدنا في صنع أجسام آلية ببساطة على حساب البلاستيك.
جمع الروبوتات ، لا يمكننا القيام به دون مساعدة من تيرنر. أحد أصدقائنا ساعدنا في هذا. تتطلب أعمال البناء في المكب غالبًا حلولًا غير قياسية ومعقدة ، كنا محظوظين جدًا بمقابلة الرجال الذين ساعدونا أيضًا بنشاط في هذه الأمور.
كان المشروع محظوظًا جدًا مع المصمم ، الفنان ، موهبته لا تقدر بثمن.



لتوفير أكبر قدر ممكن من بناء ساحة الألعاب ، كان علينا أن نفعل كل شيء تقريبًا. ولكن بالإضافة إلى ملعب تدريب كبير ، كان هناك أيضًا جزء تقني ...
هزيمة تأخير الفيديو
من المؤكد أن الأسئلة المتعلقة بالتنفيذ الهندسي للمشروع ستكون أكثر إثارة لك من وصف "التخطيط الحضري" لدينا.
دعنا نعود إلى اللحظة التي ، كما تتذكر ، وضعنا الكاميرا على "العربة" وتمكنا من التحكم فيها. بعد ذلك ، حان الوقت لاختيار الأجهزة والتكنولوجيا لإنشاء روبوتاتنا. هنا كانت المفاجأة الأولى تنتظرنا: بعد المرور بعشرات الكاميرات ، لم نتمكن من تحقيق تأخير في إشارة التحكم في الروبوت عبر الإنترنت. كان كل شيء معقدًا بحلول الوقت الذي استغرقته لطلب عينات الكاميرا في الصين واختبارها.
أردنا أن نجعل نظام التحكم الآلي في المتصفح بالكامل دون أي "تنزيل عميلنا الرائع" ومشغلات فلاش القديمة. هذا ضاقت إلى حد كبير قائمة التقنيات والكاميرات التي تدعمها. لقد جربنا لفترة طويلة نقل دفق فيديو بتنسيق MJPEG ، لكن في النهاية تخلينا عن هذه الفكرة. هذه التجارب كلفتنا ستة أشهر. لقد قمنا بتجميع أول خمسة روبوتات بالكامل وأطلقنا اختبارات مفتوحة للجميع ، ولكن ...
أظهرت الاختبارات المباشرة عدم قدرة الموجه على معالجة دفق فيديو ضخم عبر الهواء من عدة روبوتات بتنسيق MJPEG ، بمجرد أن حاولنا تحسين دقة الصورة. لا يمكن جعل تدفق الفيديو من روبوت واحد أقل من 20-30 ميغابت ، مما جعل من المستحيل التشغيل المستقر المتزامن للروبوتات العشرين التي خططناها. أيضا ، لم نتمكن من إيجاد حل لنقل الصوت الجاهزة دون تأخير. أدى ذلك إلى حقيقة أننا اضطررنا إلى البحث مرة أخرى عن التكنولوجيا المناسبة لمهامنا.
نتيجة لذلك ، استقر خيارنا على WebRTC. هذا يضمن لنا نقل صور الفيديو والصوت مع تأخير 0.2 ثانية فقط.

ثم حان الوقت لمحاكاة وتجميع الروبوتات. لاعتماد أقل على الموردين الخارجيين ، قمنا بطباعة جميع تفاصيل برامج الروبوت الخاصة بنا على طابعة ثلاثية الأبعاد. سمح لنا ذلك بإنشاء أكثر نماذج الروبوت ضغطًا ، ووضع جميع الأجهزة الإلكترونية والبطاريات القوية على النحو الأمثل.
نظام الطاقة
كان السؤال التالي يتعلق بإمدادات الطاقة ، لأننا أردنا حقًا تغيير البطاريات بأقل قدر ممكن. بعد استعراض العديد من الخيارات الجاهزة ، استقرنا على بطاريتنا الخاصة ، والتي تم تجميعها من عناصر Panasonic 18650B. بفضل الجهد الكهربائي للبطارية الذي يبلغ 17 فولت وسعة 6800 مللي أمبير في الساعة ، أصبح بإمكان روبوتاتنا السفر لمدة 10-12 ساعة بتهمة واحدة.

خلال هذه التجارب ، نجحنا في "قتل" مائة عنصر ، لأننا أردنا استخدام سعة العناصر إلى الحد الأقصى ، وانخفض الجهد في نهاية التفريغ بسرعة كبيرة ولم يقدم مؤشر الجهد البسيط ، الذي تم تجميعه على مقسم ، دائمًا قراءات دقيقة. لكن في النهاية ، رفعنا الحد الأدنى للجهد الأدنى المسموح به من 2.5 فولت إلى 3.2 ، بالإضافة إلى وضعنا دائرة كهربائية صغيرة للتحكم الدقيق في الجهد وتوقف حالات "الموت" من Panasonic.
كشواحن ، اخترنا أجهزة iMax B6 ، التي تحظى بشعبية كبيرة بين المصممين ، مع خيار الشحن في وضع توازن العناصر. لقد "قتلنا" بعض البطاريات بسبب المعايرة غير الصحيحة للنسخ الصينية من iMax B6. نحن ربط خمس علب وشحنها في وضع التوازن. في نهاية الشحن ، تم فحص الجهد الكلي للبطارية دون تقسيمها إلى خلايا ، ولكن في الحقيقة لم يتم شحن أحد البنوك بالكامل و "توفي" أولاً.
محركات للروبوتات
بالتأكيد كثير منكم سأل نفسك السؤال: لماذا 17 فولت؟ الجواب يكمن في المحركات. المحركات هي الجزء الثاني من "عذابنا الصيني" بعد اختيار الكاميرات. ذهبنا أكثر من محركات مختلفة. ولرعبنا ، كان لدى جميعهم تقريبًا مورد صغير وفشلوا سريعًا. بعد 3-4 أشهر ، خلال التجارب ، تمكنا من العثور على الشركة المصنعة للمحركات "طبيعية" من حيث الموثوقية ، ولكن لم يكن هناك حل نهائي.
في الجهاز التقليدي ، يلعب ناقل الحركة دورًا رئيسيًا في نقل الطاقة من المحرك إلى العجلات. لم يكن لدينا ذلك. بتقليل الجهد على المحركات ، نجحنا في تقليل سرعة الروبوت ، ولكن في الوقت نفسه فقد قوته ولم تتمكن "دباباتنا" من الدوران ببطء. قريبا حلنا هذه المشكلة.
أوه ، قلت هذه الكلمة هي "tanchiki".
لماذا هي "الدبابات"؟
لماذا بالضبط "الدبابات"؟ الجواب بسيط. إذا أضفنا إلى الكاميرا تأخيرًا غير معروف لقناة الإنترنت ، فسيتمكن بعض المقيمين في أستراليا من التحكم بشكل مريح فقط في شيء بطيء نسبيًا. كانت هذه الحجة الأولى لصالح اختيار الدبابات ، والحجة الثانية ، التي أقنعتنا أخيرًا ، كانت في سيطرة مريحة على الروبوت. اعتاد الشخص على ذلك من خلال النقر على "السهم" إلى اليمين لانتظار أن ينتقل الروبوت إلى اليمين ، وبدون اليرقات كان من المستحيل القيام به ، لأن الدبابات فقط كانت "في مكانها". كما كنا سعداء حول "القدرة الفائقة عبر البلاد" المتوقعة. بعد أن طلبت صندوقًا من المسارات المطاطية في الصين ، بدأنا في طباعة "بكرات عجلات" تحت القضبان.

أول الاختبارات كسرت أحلامنا إلى حداد ، غالبًا ما طار اليرقات من الخزان عند اصطدامه بالعقبات المنخفضة. بعد أن درسنا أساسيات ميكانيكا الخزانات وجربنا مختلف الموترات والعجلات المساعدة ، ما زلنا لم نحل هذه المشكلة. اضطررت للتخلي عن اليرقات. نظرًا لأن الروبوتات تمت طباعتها وتجميعها بالفعل ، فقد كان علينا البحث عن حل سريع وغير معقد ، لكنه كان شيئًا واحدًا - عجلات جيدة مع قاعدة مطاطية. وكيف يمكنك تشغيل البقعة التي تسألها؟ لقد "خرجنا" من خلال ربط المحورين مع شريط رفيع من طابعة ثلاثية الأبعاد. بشكل عام ، حصلنا على روبوت بعجلات مع نظام الدفع الرباعي ودوران في المكان.

روبوت القلب
لقد تحدثنا بالفعل عن معظم عناصر روبوتنا ولم يقل أي شيء عن أهم عنصر.
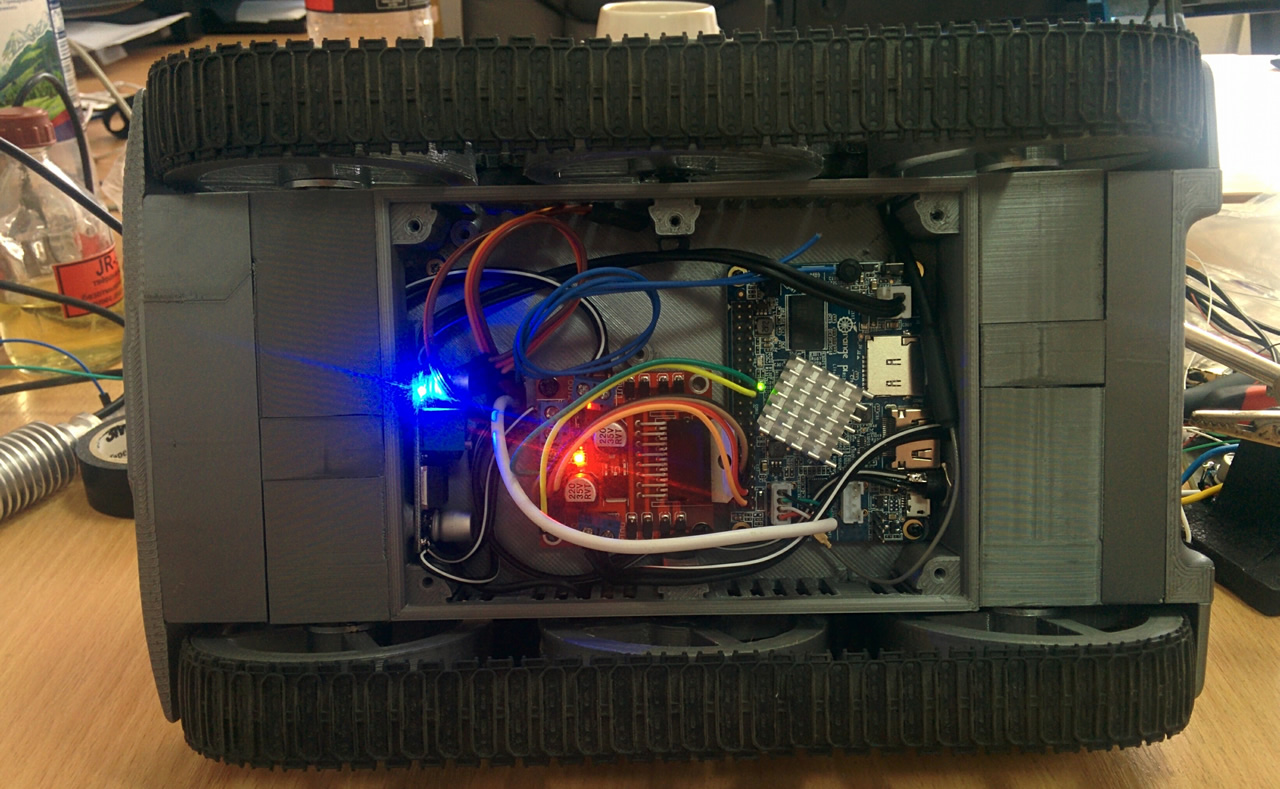
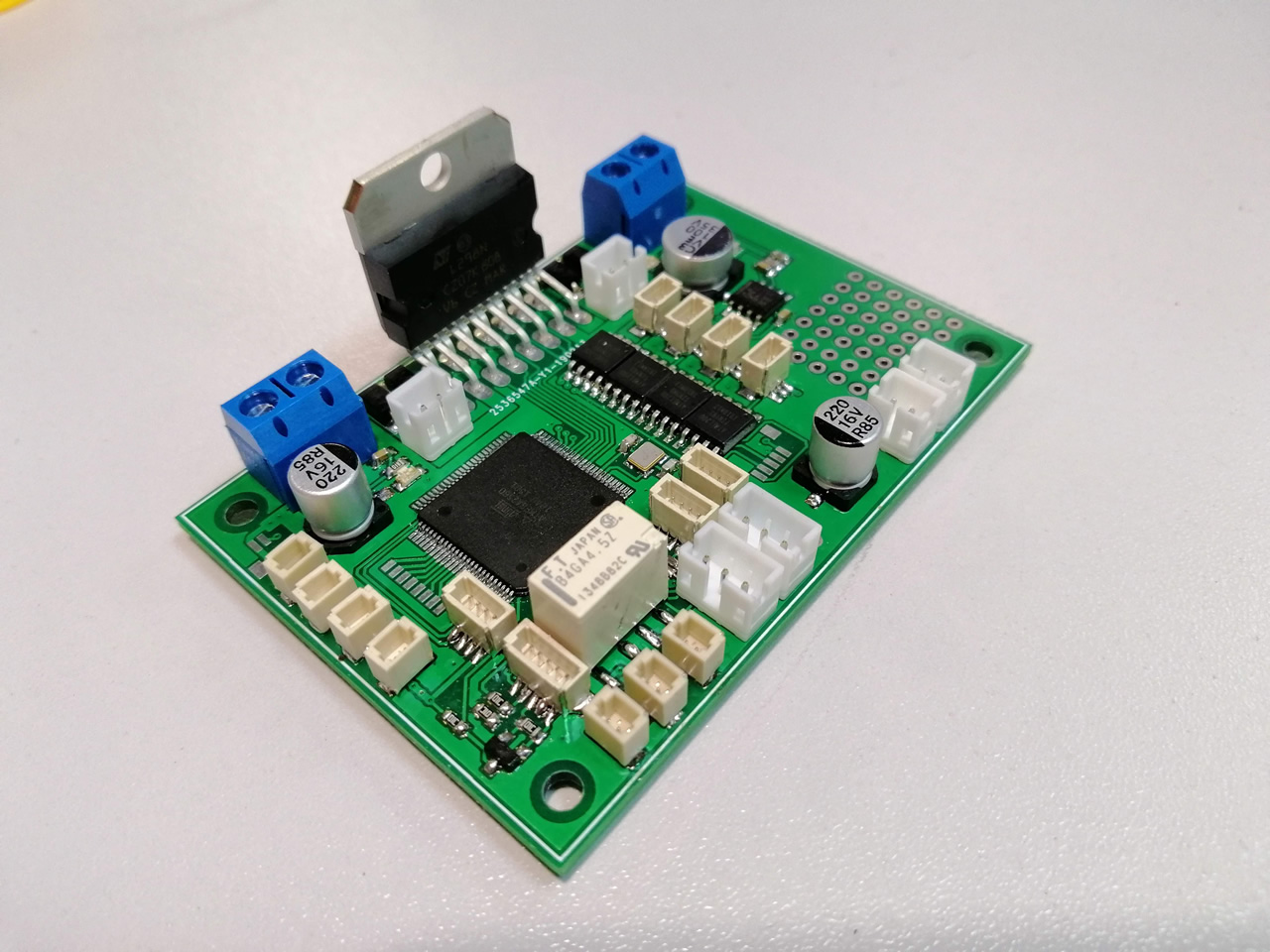
كان برنامج الروبوت الخاص بنا يعتمد على جهاز الكمبيوتر Raspberry Pi mini على نظام التشغيل Linux وبرنامج مطور خصيصًا يتيح للروبوت التواصل مع الخادم. يعمل Raspberry Pi مع لوحة المراقبة والتحكم الخاصة بنا. تشتمل اللوحة على متحكم وسائق محرك ورقائق معالجة الإشارات من أجهزة استشعار مختلفة ووحدة للتحكم الدقيق في جهد البطارية. لسهولة التجميع ، قمنا بتطبيق جميع الاتصالات الطرفية على موصلات منفصلة.
كما ذكرت سابقًا ، كان علينا غالبًا تغيير المكونات عندما نواجه مشكلات غير متوقعة. لقد حدث هذه المرة أيضا. في البداية ، قمنا بتجميع أول الروبوتات على Orange Pi ، لتوفير المال. في المستقبل ، كان علينا استبدالهم بتوت العليق Pi 2 B. لكن هذه لم تكن النهاية. سرعان ما اضطرنا إلى استبدال هذا الكمبيوتر المصغر بإصدار من Raspberry Pi 3 B + والذي كان يحتوي على وحدة 5 جيجا هرتز على متن WiFi. ولكن أكثر على ذلك في وقت لاحق.
إعداد Wi-Fi
كانت المشكلة التالية التي تنتظرنا هي قناة راديو Wi-Fi. لقد علمنا بها فقط من خلال البدء في الاختبارات على الفور 10 روبوتات متحركة. يقع مكب النفايات لدينا في قبو مغلق ، وكان "إعادة الانعكاس" للجدران الخرسانية المسلحة أمرًا فظيعًا. سار أمر التحكم ، لكن دفق الفيديو "تباطأ" ، عندما غادر أحد الروبوتات إلى الركن البعيد من الغرفة.
ساعدنا الانتقال من 2.4 جيجا هرتز إلى 5 جيجا هرتز في التغلب على تحميل القناة. لكن الصعوبات لم تنته عند هذا الحد. إذا تحرك الروبوت بالقرب من الزاوية ، فقد انخفضت الإشارة إلى أقل من -80 ديسيبل وبدأت الفرامل. أخيرًا ، قمنا بحل المشكلة عن طريق تثبيت هوائي قطاعي مع استقبال التنوع ورفع قدرة المرسل إلى نصف واط. بالطبع ، كان لابد من اختيار "الموجه" من قطاع حلول الأعمال باستخدام معالج قوي.
تجدر الإشارة إلى أنه بدلاً من زيادة الطاقة ، حاولنا لفترة طويلة تكوين وضع التجوال "غير الملحوم" استنادًا إلى حل Ubiquity ، ولكن للأسف ، تحتاج وحدة Wi-Fi التي نحتاجها إلى "رفض" لدعمها ، لكن iPhone كان يعمل بشكل مثالي ، حيث كان يتحرك بين عدة نقاط وصول.


بعد جمع "عشرة" روبوتات وإطلاق خادم المراقبة والتحكم ، في نوفمبر 2018 ، ذهبنا إلى Kickstarter مع مشروع Isotopium Chernobyl . لم ندرك حتى أن عشرات الآلاف من الناس سيحاولون لعبتنا قريبًا.
اقرأ عن مقالتنا المستقبلية ولماذا أغلقنا المشروع تقريبًا في مقالتنا التالية: لعبة عبر الإنترنت مع نماذج RC يتم التحكم فيها عبر الإنترنت
