المشاركات في السلسلة:
8. نحن نتحكم من الهاتف ROS Control ، GPS العقدة7. توطين الروبوت: gmapping ، AMCL ، النقاط المرجعية على خريطة الغرفة6. المسافات مع ترميز عجلة ، خريطة الغرفة ، ليدار5. نحن نعمل في rviz وشرفة المراقبة: xacro ، أجهزة استشعار جديدة.4. قم بإنشاء محاكاة روبوت باستخدام محرري rviz و gazebo.3. تسريع ، تغيير الكاميرا ، إصلاح المشية2. البرمجيات1. الحديدالبدء في دراسة ROS (نظام التشغيل الآلي) ، تشعر بالدهشة أولاً لكيفية "كل شيء معقد" ، من كمية المعلومات حول المواضيع والعقد والإجراءات ، يدور رأسك. والرغبة الأولى هي العودة إلى إدارة الروبوت إلى النصوص القديمة الجيدة. لكن لا. يجب على كل رجل بالغ جمع شيء أقل لرجل يقود ، وميض ، صرير. تم اختيار ROS كمنصة ، لأنها لا تزال الخطوة التالية في تطوير الروبوتات في عالم اردوينو بلا روح. يُقترح تجميع "عربة" ROS ، التي لن تكون رخيصة فحسب ، بل ستكون عملية أيضًا: يمكن أن تتماشى مع خطك ، جسمك :) الخطوات الأولى ستكون:
بعض المزيد من كلمات
الشيء الثاني الذي يلفت النظر عند دراسة ROS هو تكلفة المنصات في السوق. وهناك مجموعة من برغر turtlebot (
كواحدة من تلك بأسعار معقولة ) - 549 دولار (34500 ص.). كل شيء آخر هو أكثر تكلفة. قد يتم الاعتراض على أن حصة الأسد من السعر هي ليدار ، وهو جهاز لتحديد موضع الروبوت في الفضاء. الذي في حد ذاته يقف تحت 15K ص. ومع ذلك ، فإن جميع المكونات الأخرى ليست رخيصة أيضًا.
دعونا نحسب كم ستكلفنا "العربة" لدينا:
المجموع: 8000 ص.
السعر مرتفع أيضًا ، لكنه أرخص بكثير من سمك السلحفاة. إذا رغبت في ذلك ، يمكن طباعة السيارات على طابعة ثلاثية الأبعاد أو أخذ قطعة من الخشب الرقائقي. ثم يبقى فقط أن تأخذ محركات العاصمة. يمكن أيضًا استبدال بطارية التوت بتناظرية أرخص ، والشيء الرئيسي هو أنه يعطي 5V 3A.
نحن نجمعاعتمد المشروع على مشروع موجود مسبقًا -
www.rosbots.com/build_it ، ولكن مع تعديلات مهمة. بالإضافة إلى ذلك ، تم التخلي عن المشروع الأساسي ، بناءً على المعلومات الواردة من الموقع ، لذلك عليك أن تضع كل شيء في ذهنك بنفسك.
بداية التجميع وتركيب المحركات مماثلة للإرشادات المذكورة أعلاه:
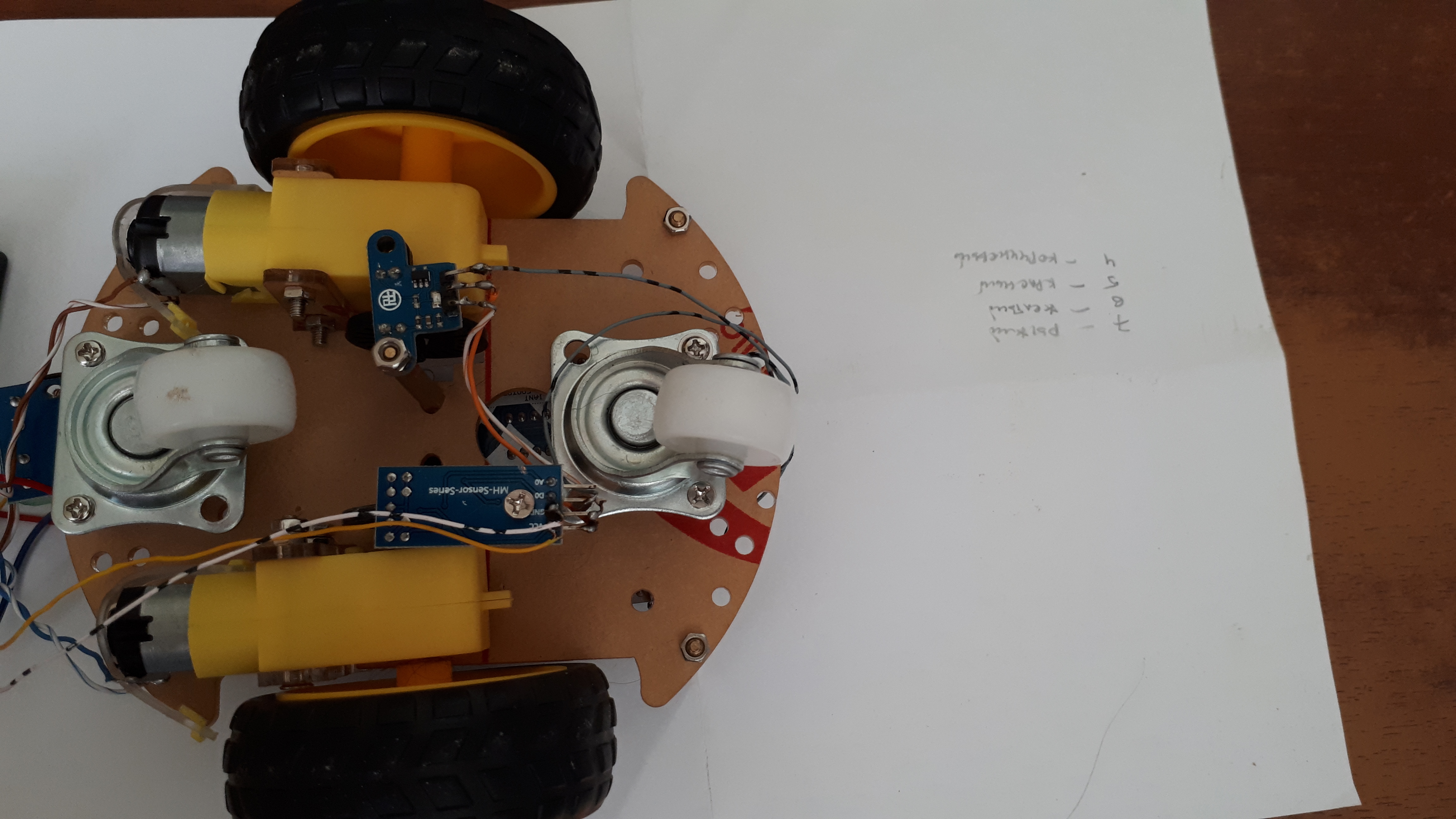
تحتاج هنا إلى الانتباه إلى برامج الترميز ، التي يتم تثبيتها بطريقة "تغطي" الأقراص مع فتحات ، مرتدية المحركات:
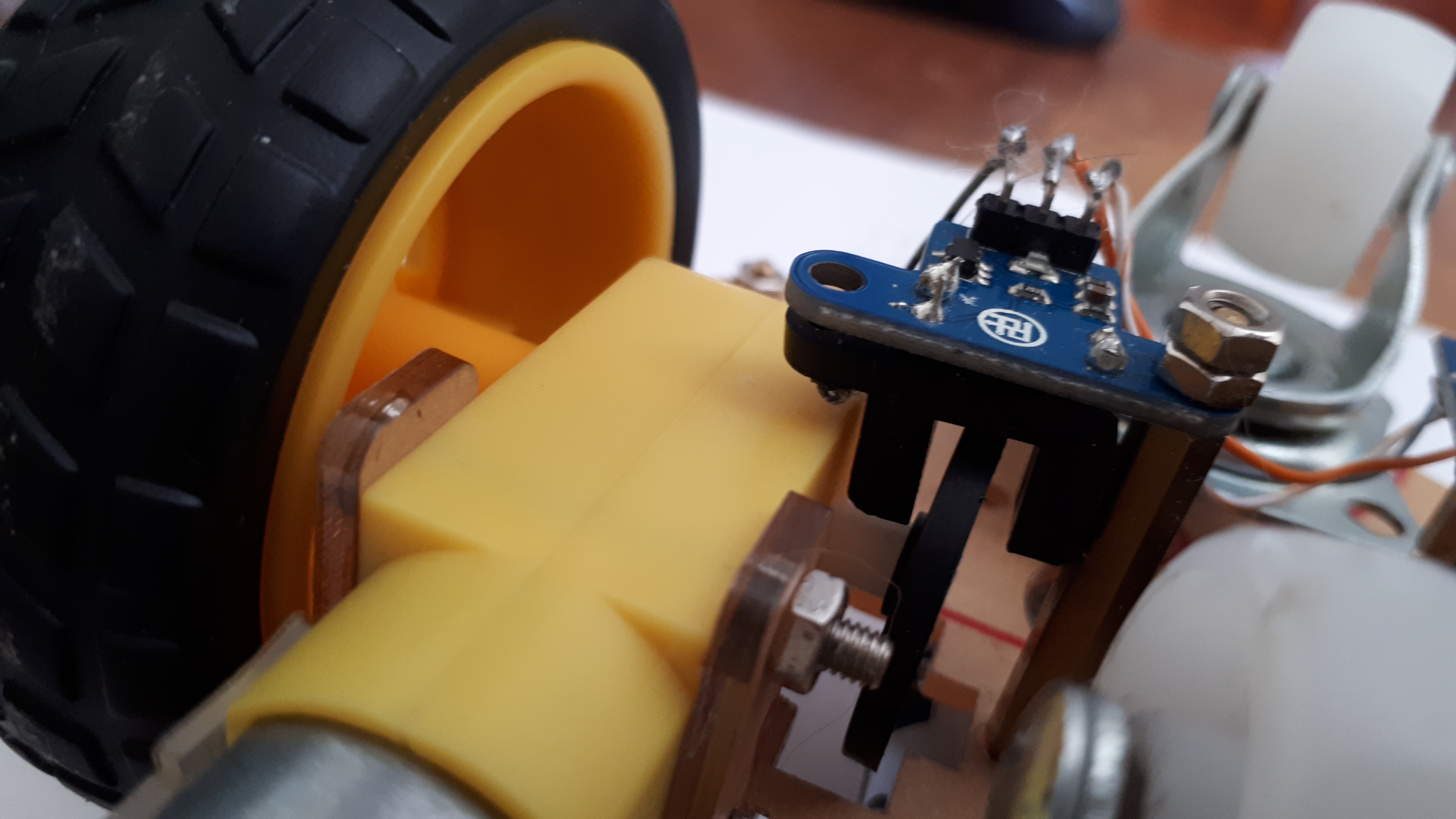
* بشكل عام ، ليست أجهزة التشفير قوية مفيدة ولا يمكنك تركيبها. تسمح لك الشفرات الضوئية بتحديد المسافة المقطوعة ، لكن لسوء الحظ ، لا تسمح لك بتحديد اتجاه الحركة.
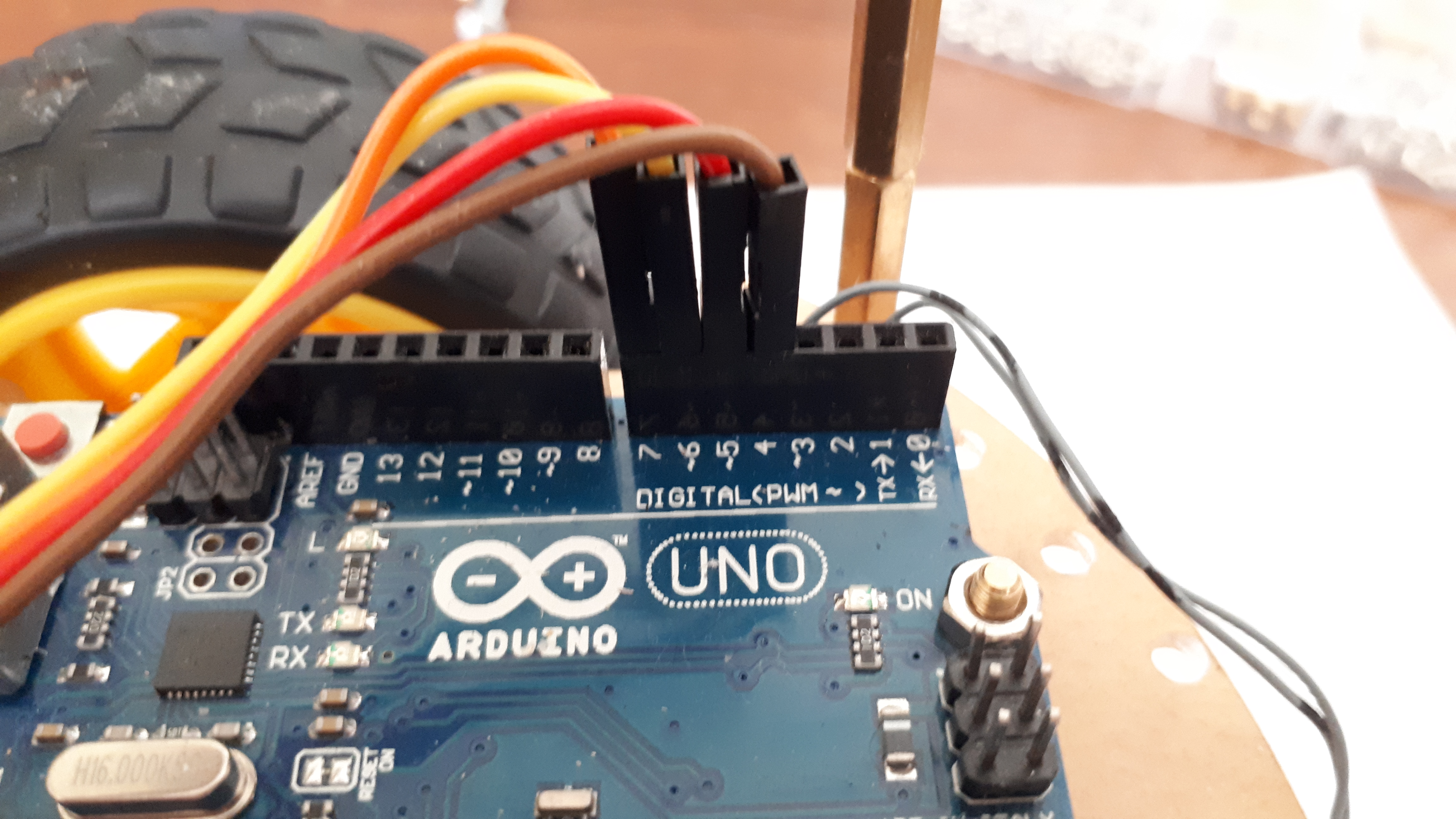
بعد تركيب المحركات وأجهزة الترميز (اختياري) ، نربط الأسلاك مع uno arduino ، برنامج تشغيل المحرك ، حجرة البطارية لبطاريتي 18650. يشبه مخطط الاتصال المخطط المنشور على موقع المشروع الأساسي مع استثناء واحد:

يمكن أن تؤخذ 5V لأجهزة التشفير مع اردوينو (VCC من جهاز استشعار السرعة اليمنى ومستشعر السرعة اليسرى في 5V اردوينو).
نصلح اردوينو وسائق المحرك ، قوة السائق:

المعكرونة أقرب:
سائق المحرك. المحطات الخضراء تحتوي على أزواج من الأسلاك من المحركات:

لن يتم تشغيل Arduino بواسطة البطاريات ، بل سيتم توصيله عبر USB إلى التوت.
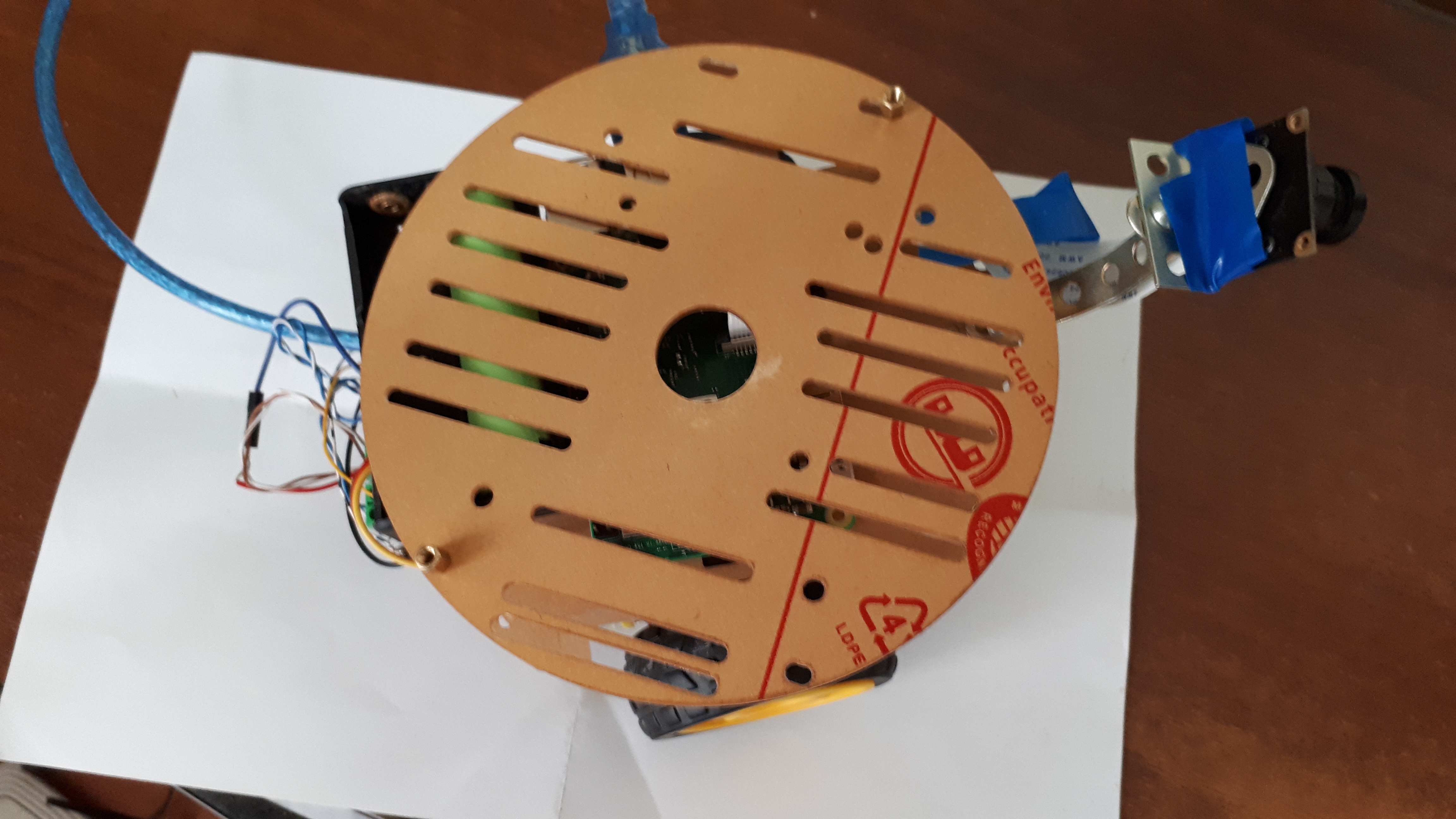
نضع الطبقة الثانية من الجهاز
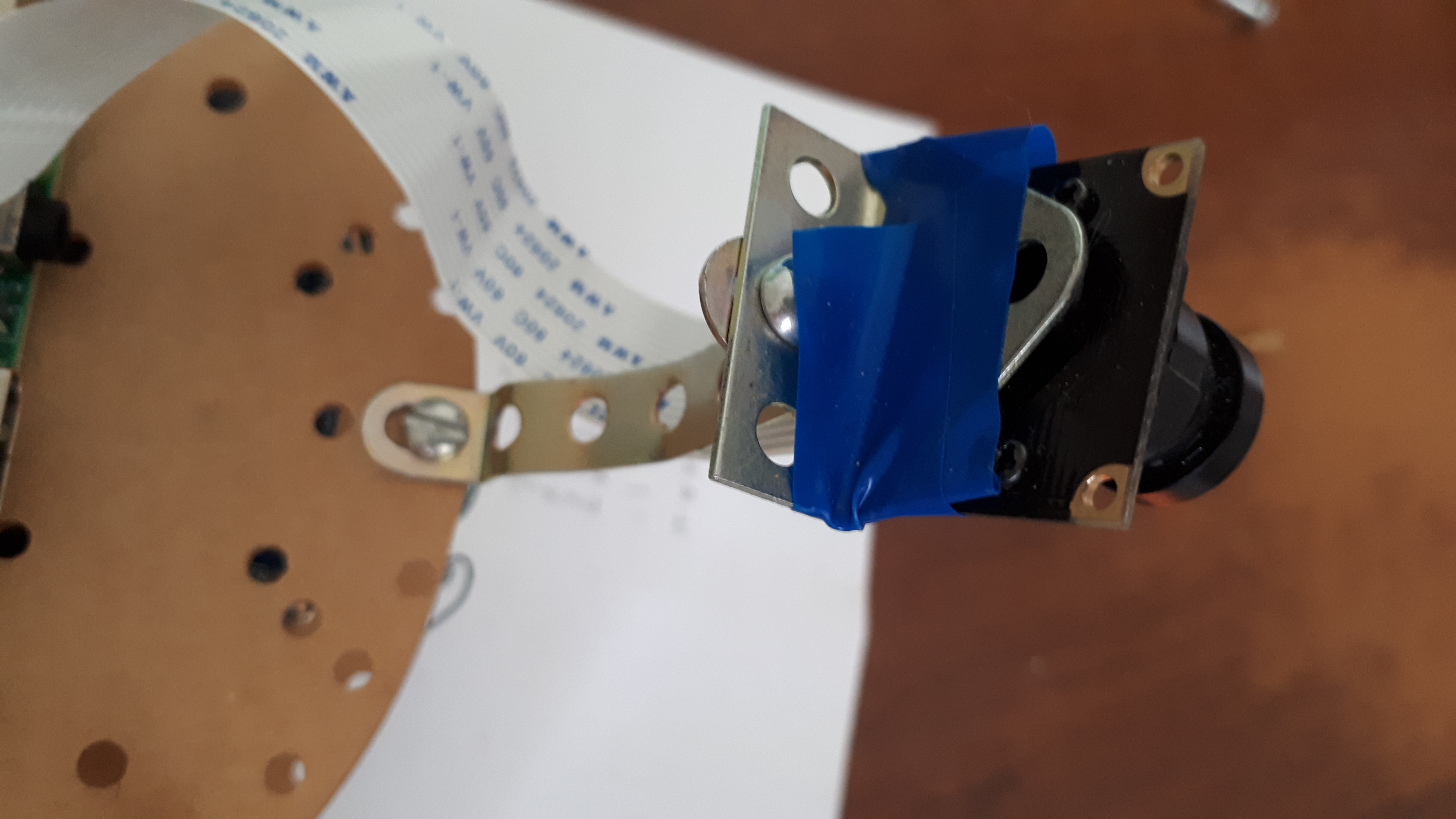
ستجد هنا حجرة البطارية ، التوت بي ، الكاميرا على التفاصيل من المصمم السوفيتي:
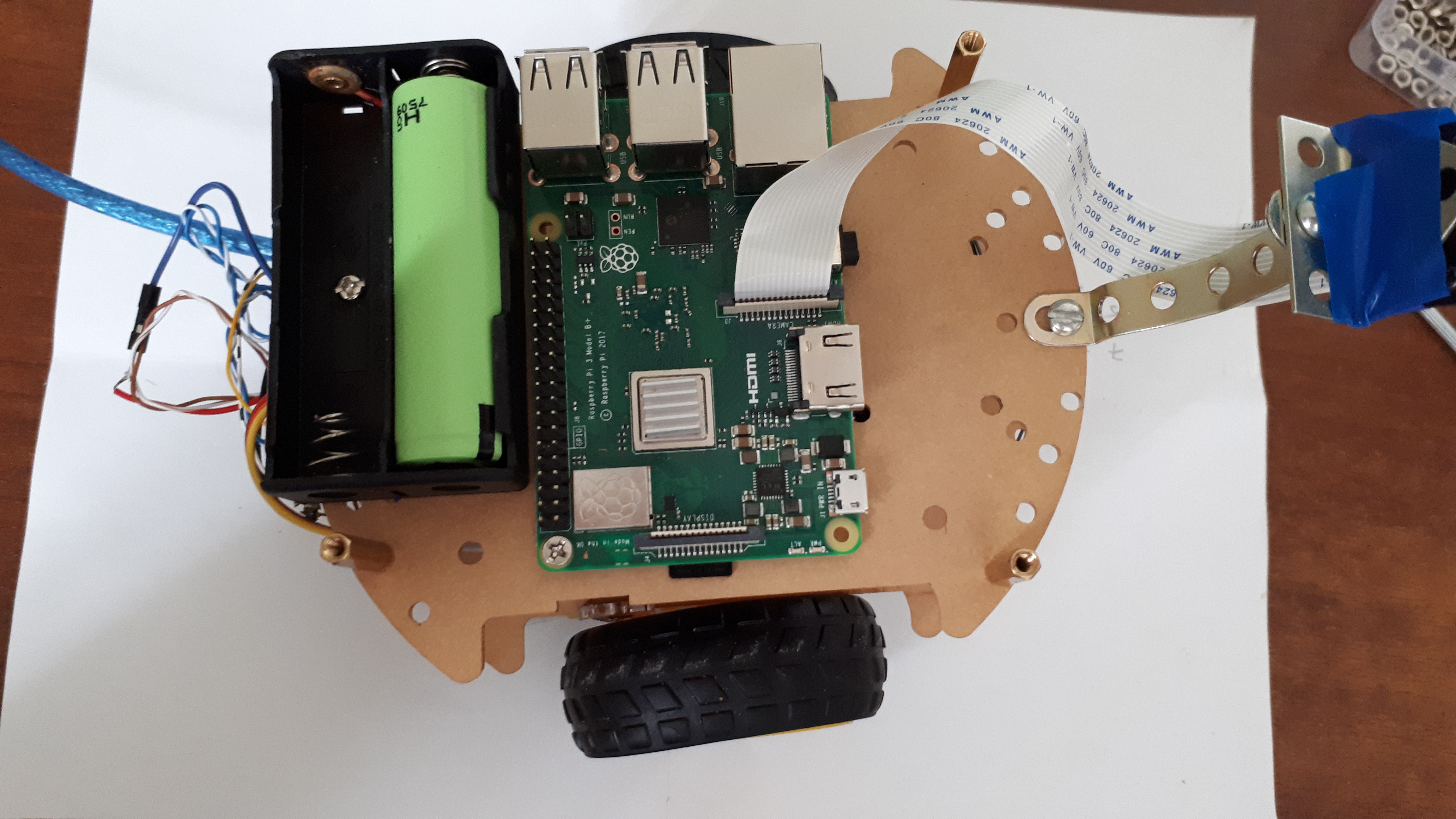
لا تنس توصيل الكبل من الكاميرا بشكل صحيح في التوت:

المصمم السوفيتي في:
 أغلق برجر ، الطبقة الثالثة من "العربة"
أغلق برجر ، الطبقة الثالثة من "العربة" .
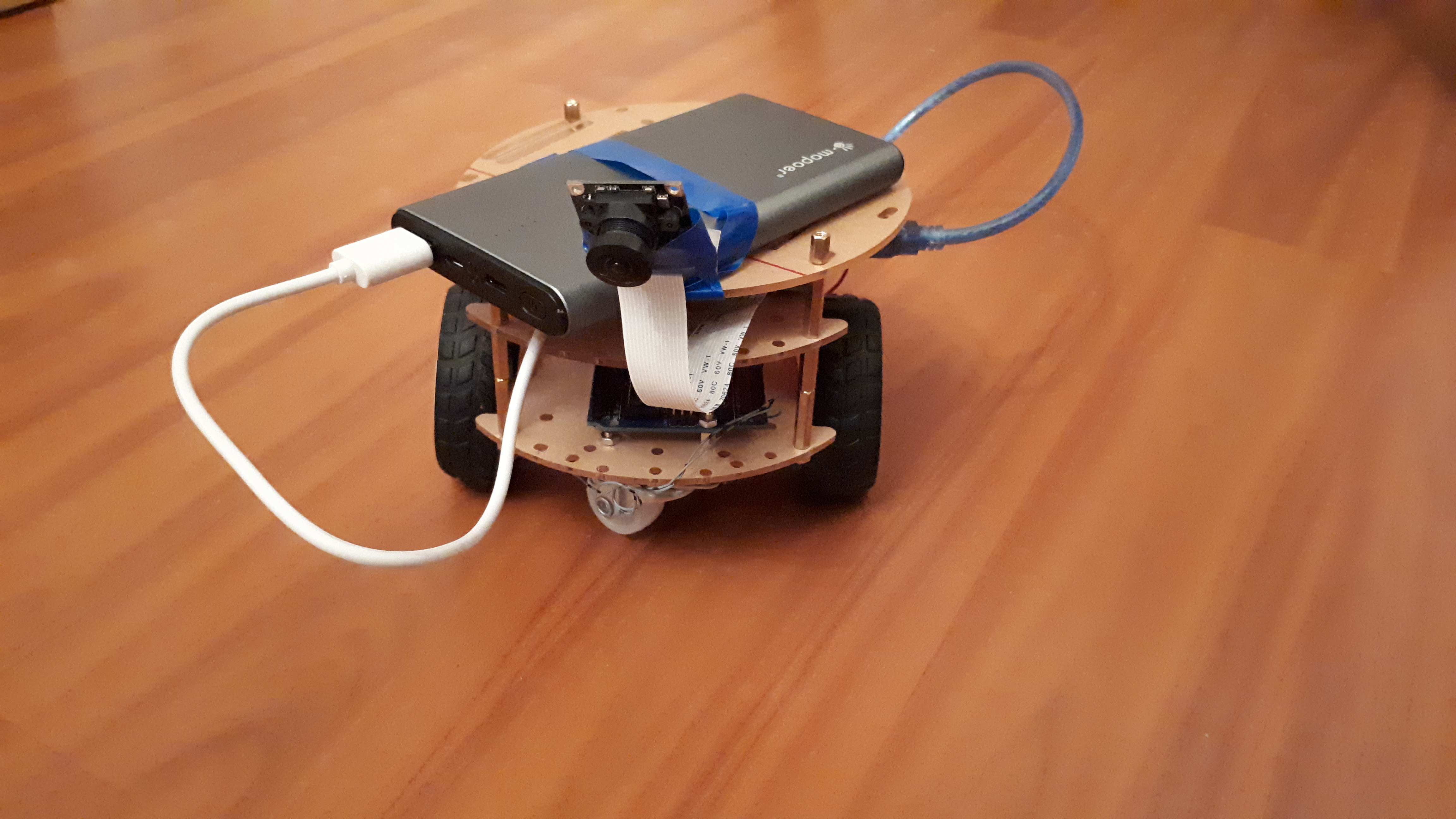
هنا سيدفع powerbank لتوت العليق:

* قليلا عن powerbank لتشغيل التوت بي:
:
كل شيء ، السيارة جاهزة!
في الوظائف التالية سنتحدث مباشرة عن ROS والخطوط والجسم والقطط والابتسامات.
نصائح ونقد لا ترحم هي موضع ترحيب!
* يتم تحديث مخطط الأسلاك.