لجعل الالتقاط الآلي أكثر موثوقية ، يقوم الباحثون بتطوير كائنات معقدة بقدر الإمكان للتعامل معها.
 مستوحى من مفهوم الصور التنافسية ، قام باحثون من جامعة كاليفورنيا في بيركلي بدراسة أشياء تنافسية جسدية مصممة بعناية بحيث يصعب التقاطها باستخدام قبضات آلية قياسية
مستوحى من مفهوم الصور التنافسية ، قام باحثون من جامعة كاليفورنيا في بيركلي بدراسة أشياء تنافسية جسدية مصممة بعناية بحيث يصعب التقاطها باستخدام قبضات آلية قياسيةفي الآونة الأخيرة ، ظهر قدر كبير من الأبحاث حول موضوع "الصور التنافسية" ، وهي صور لكائنات تم تعديلها بحيث يصعب على خوارزميات رؤية الكمبيوتر التعرف عليها. تتمثل الفكرة في استخدام هذه الصور لتطوير خوارزميات رؤية قوية للكمبيوتر ، نظرًا لأن طبيعتها "العدائية" هي خيار "الحالة الأسوأ" الذي تم تطبيقه بشكل خاص - وإذا كانت الخوارزمية تستطيع التعامل مع الصور العدائية ، فمن المحتمل أن تتعامل مع معظمها مهام أخرى.
قام باحثون من مختبر الأتمتة والهندسة (
AUTOLAB ) في جامعة كاليفورنيا في بيركلي ، بقيادة البروفيسور كين جولدبيرج ، بتوسيع هذا المفهوم ليشمل السيطرة الآلية. لقد صمموا بشكل خاص أشياء تنافسية جسدية بحيث كان من الصعب رفعها بأذرع آلية تقليدية. من الضروري فقط تصحيح الأرقام المعتادة ثلاثية الأبعاد بشكل طفيف ، وسوف تواجه قبضة الأصابع القياسية جميع أنواع الصعوبات ، في محاولة لفهم الكائن بشكل صحيح.
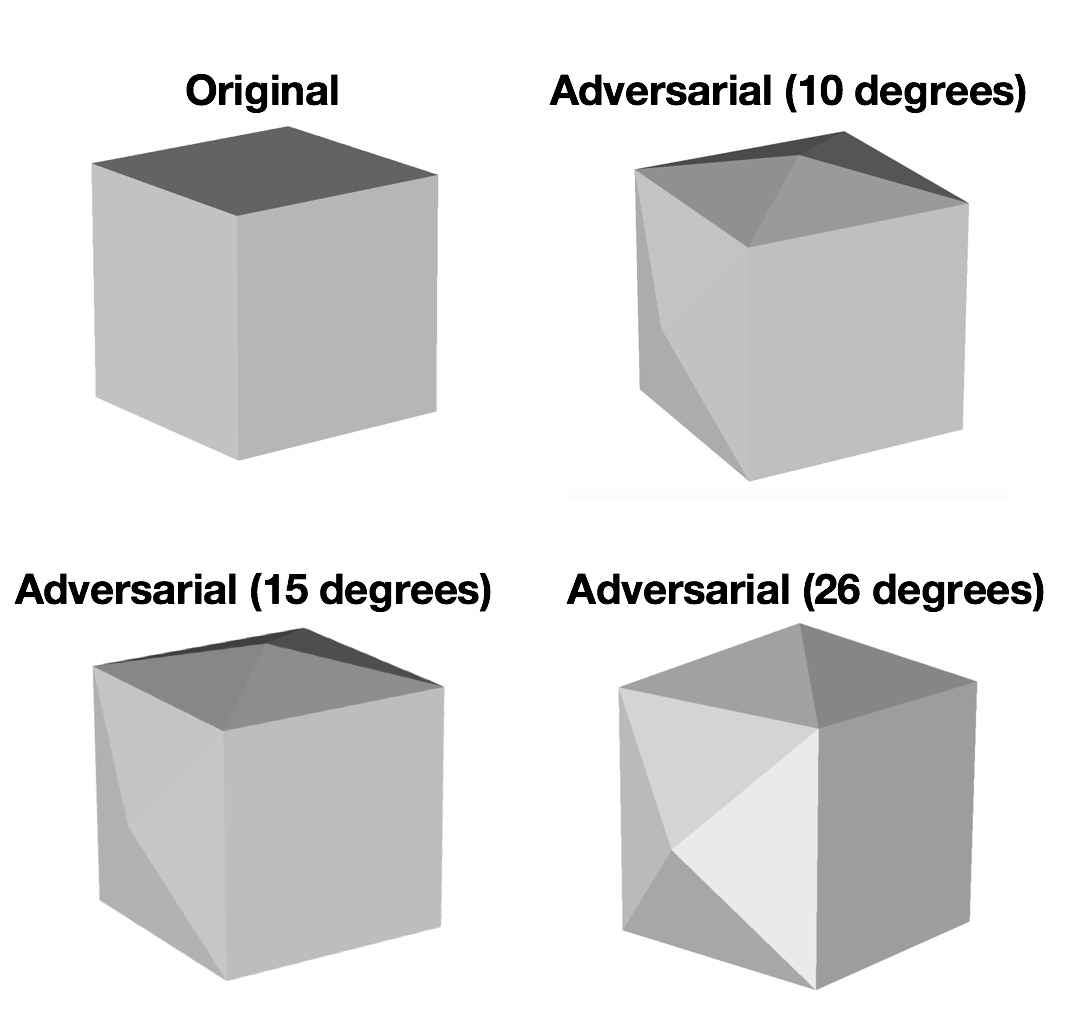 بدءًا من المكعب ، يتطور كائن تنافسي ، ويصبح التقاطه أكثر صعوبة مع مشبك بإصبعين - عندما يحاول الضغط على سطح زاوي ، يدور الكائن وينزلق للخارج.
بدءًا من المكعب ، يتطور كائن تنافسي ، ويصبح التقاطه أكثر صعوبة مع مشبك بإصبعين - عندما يحاول الضغط على سطح زاوي ، يدور الكائن وينزلق للخارج.السمة الرئيسية لهذه الأشياء التنافسية هي أنها تبدو كما لو كانت سهلة الإمساك ، ولكن مع وجود إصبعين على الأقل ، فقد أصبح الأمر صعبًا. الفرق بين كيف تبدو الكائنات وهندستها الحقيقية ضئيل: في أحد الأمثلة ، هذا مكعب ذو أهرام منخفضة على ثلاثة من الجوانب الستة - أصغرها له زاوية ميل عند حواف 10 درجات فقط. ومقابل كل هرم يوجد وجه مسطح عادي ، لذلك ، لا يحتوي المكعب على وجوه مسطحة متعارضة. لهذا السبب ، فإن قبضة الإصبعين العاملين على مشبك الكائنات تواجه مشاكل ، لأنه إذا حاولت تثبيت السطح بزاوية ، فإن قوة الضغط ستتسبب في دوران الكائن ، وغالبًا ما تسقط من المشبك.
 يلتقط الالتقاط الموازي مع جهات الاتصال النقطية مكعبًا منتظمًا (يسارًا) ولا يمكنه التعامل مع مكعب تنافسي تم تطويره بواسطة الباحثين (يمين)
يلتقط الالتقاط الموازي مع جهات الاتصال النقطية مكعبًا منتظمًا (يسارًا) ولا يمكنه التعامل مع مكعب تنافسي تم تطويره بواسطة الباحثين (يمين)غالبًا ما يبحث مخططي الالتقاط عن أسطح متجانسة ناعمة يمكن تثبيتها ، وبما أن الفارق بين المكعب التنافسي والمكعب العادي صغير بما يكفي لتفويت مستشعر ثلاثي الأبعاد ، فستعتقد معظم الأنظمة الآلية: "أوه ، هذا مكعب ، إنه سهل للغاية ! " ثم سيفشلون بالتأكيد المهمة عندما يخرج المكعب ويخرج من قبضته.
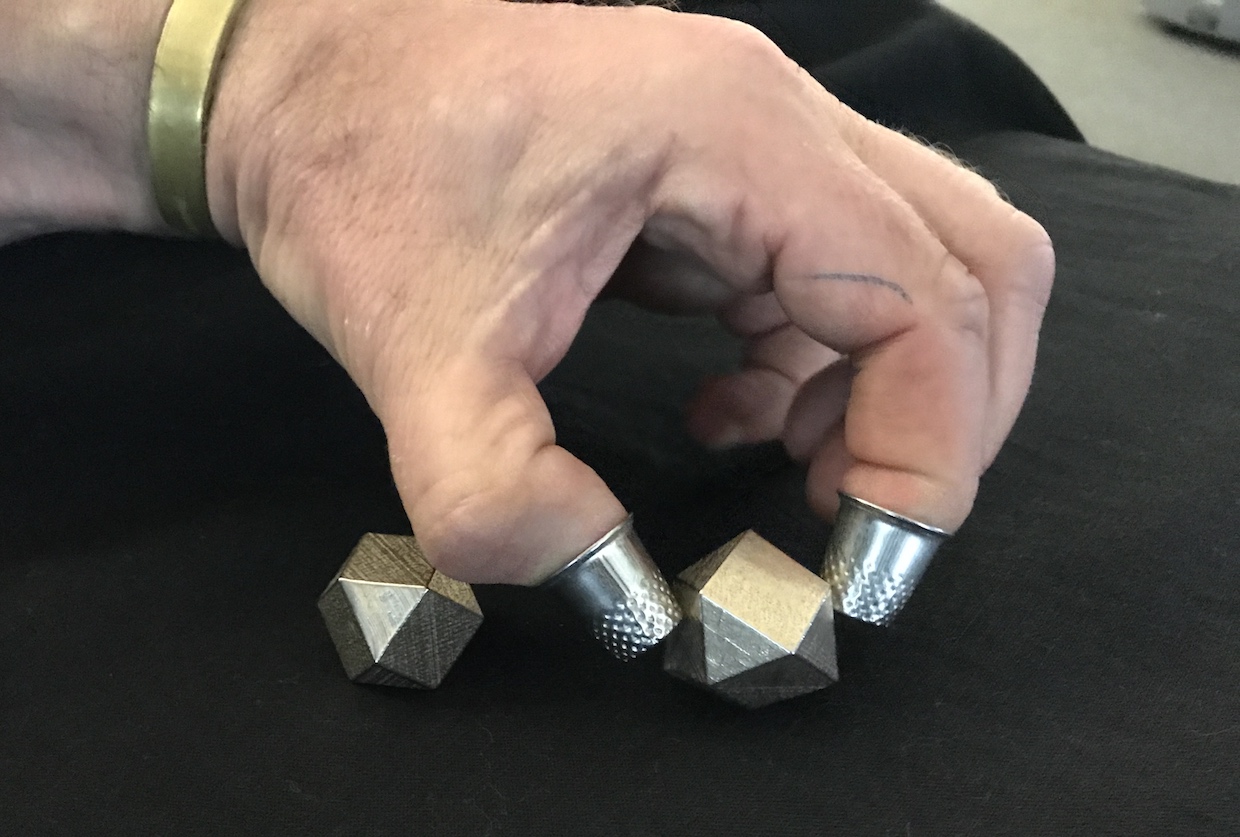 أشكال الخصومة تعمل أيضا في البشر - ارتداء الكشتبانات التي تحاكي الصلب البارد غير الحساسة للروبوت ، وباستخدام إصبعين لتثبيته ، أكد الباحثون أنه من الصعب رفع هذه الأشياء
أشكال الخصومة تعمل أيضا في البشر - ارتداء الكشتبانات التي تحاكي الصلب البارد غير الحساسة للروبوت ، وباستخدام إصبعين لتثبيته ، أكد الباحثون أنه من الصعب رفع هذه الأشياءمع التعقيد المتزايد للنموذج ، يصبح من الصعب بشكل متزايد تطوير نسخة تنافسية. أخذ الباحثون كوبوكتاهيدرون (متعدد الوجوه مع ثمانية وجوه مثلثية وستة مربعات) ، قام الباحثون بتغيير عشوائي لرؤوس الشكل (في المحاكاة) حتى يحصلوا على شكل ليس له وجوه معاكسة مباشرة. وللحصول على أشكال أكثر تعقيدًا ، مثل الأسطوانات المتقاطعة ، تم الحصول على أمثلة تنافسية باستخدام خوارزمية التعلم العميق.
 للحصول على أشكال أكثر تعقيدًا ، مثل الأسطوانات المتقاطعة ، تم الحصول على أمثلة تنافسية باستخدام خوارزميات التعلم العميق
للحصول على أشكال أكثر تعقيدًا ، مثل الأسطوانات المتقاطعة ، تم الحصول على أمثلة تنافسية باستخدام خوارزميات التعلم العميقفي
الاختبارات الأولية في العالم الحقيقي ، حاول التقاط نقطة متوازية رفع بعض هذه الأشياء المثيرة للجدل. في كل حالة ، كان الاحتمال المقدر لالتقاط الكائن 100٪ (استنادًا إلى سياسة
Dex-Net التي تم اختبارها في المحاكاة) ، ولكن تبين في الواقع أن عمليات الالتقاط الناجحة للمكعبات التنافسية والكوبوكتاهيدرا كانت ناجحة فقط في 13٪ من الحالات.
يقول الباحثون إنهم يخططون لاختبار هذه الكائنات بأنواع مختلفة من المقابض ، وكذلك مع المقابض الفراغية ، لمعرفة ما إذا كان بإمكانهم إنشاء أكثر الأشياء تنافسية للجميع. وتذكر أن الهدف من كل هذا ليس فقط خداع خوارزميات الالتقاط المؤسفة ، بل تطوير أدوات تساعد في جعل الالتقاط الآلي يعمل بما فيه الكفاية (نأمل) موثوقًا به في العالم الحقيقي.