يوم جيد يا هبر!
تطوير وحدة تحكم صناعية مع شاشة لجمع وتحليل البيانات ، وكذلك لإدارة الأحمال المجمعة. من يهتم بما جاء منه ، من فضلك ، تحت القط.
منذ فترة طويلة موضوع التحكم الصناعية النامية للاستخدام في أنظمة التحكم الآلي (ACS). عندما أرى وحدة التحكم التالية من Siemens أو ViewPAC أو أي مُصنِّع آخر ، لا أرى سوى قرصًا كبيرًا (أكتب عن عامل الشكل هذا ، وليس خيارات تركيب الحامل) مع برنامج متخصص بداخله ، لكن هذا للوهلة الأولى فقط. في الواقع ، في كثير من الأحيان ، يكون المظهر من جانب الشاشة فقط متشابهًا ، لكن اللوحة الخلفية بها موصلات واجهة ، حجرات لتوصيل وحدات التوسعة ، أجهزة الاستشعار ، وسائط التخزين الخارجية ، إلخ. هناك وحدات تحكم صناعية عالمية ومتخصصة للغاية ، أي ، مصممة لأداء مجموعة من المهام ، في الغالب من نفس النوع.
لقد كانت وحدة تحكم (متخصصة للغاية) قمنا بتطويرها. بالنسبة للمبتدئين ، بضع كلمات حول التنفيذ. على الصعيد العالمي ، ينقسم الجهاز إلى قسمين. الأول هو الوحدة النمطية على iMX6D ، التي طورناها فقط لتنفيذ هذه المهام ، والثاني هو متحكم STM32F103RBT7. كما كتبت سابقًا (في المقالات السابقة) ، فإن نظام الكتلة (المعياري) هو الذي يسمح لك بتنفيذ المشاريع المعقدة بسرعة. في مثل هذا النظام ، تم تصحيح أخطاء معظم برامج الأجهزة بالفعل ، ويبقى تنسيقها فقط مع الوحدات النمطية الأخرى وتعديلها للعميل النهائي.
iMX6Dوحدة المعالج كاملة (اثنين من النوى في 1 غيغاهرتز) ، والتي تتعامل مع عدد من المهام للتفاعل مع المستخدم:
- إخراج البيانات على شاشة العرض / شاشة تعمل باللمس.
- Ethernet 10/100/1000؛
- تزامن الوقت.
- تخزين سجلات الأحداث ؛
- واجهة الويب + التحديث ؛
- تخزين بيانات الملف الشخصي ؛
- حسابات معقدة لل متحكم.
وهذه ليست قائمة كاملة بما تفعله الوحدة.
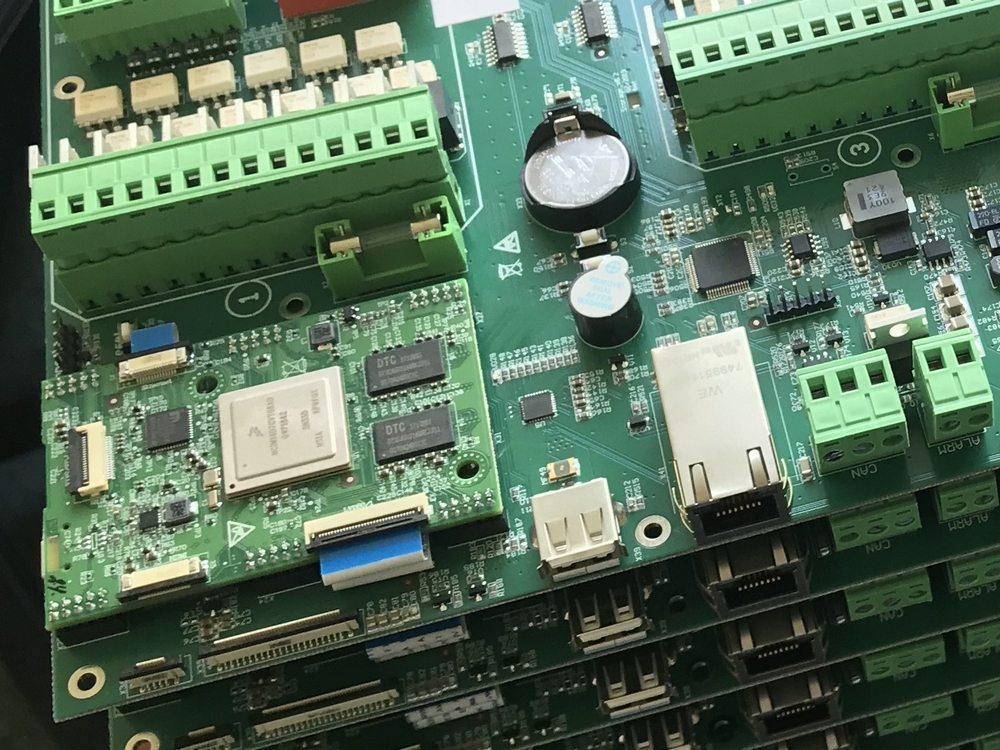 الشكل 1. وحدة المعالج
الشكل 1. وحدة المعالجتعمل الواجهة المستندة إلى الويب على تكرار الصورة تقريبًا بالكامل من الشاشة ، مما يسهل على المستخدمين التنقل وتغيير الإعدادات بسرعة. يعتمد التنفيذ ، كما في المشروعات السابقة ، على محرك مكون من 11 قطعة. نظرًا لأن المتحكم الدقيق ينفذ نصيب الأسد من المهام ، فقد أصبح من الضروري تحديث البرامج الثابتة الخاصة به (بالإضافة إلى البرنامج الرئيسي) عبر الويب. كانت هذه المهمة حادة بشكل خاص ، حيث خطط العميل لترقية الأجهزة لتوسيع الوظيفة. يتم توصيل وحدة المعالج إلى متحكم عبر UART (يتم وميض الأخير أيضًا من خلاله).
STM32متحكم في هذا المشروع مهم جدا. أولاً ، جعل استخدامه من الممكن موازنة المهام للمبرمجين وتمييز مجالين رئيسيين:
- تفاعل المستخدم.
- جمع البيانات ومعالجتها وإدارتها.
ثانياً ، النظام المعياري أكثر ملاءمة للتصحيح والاختبار وتوسيع الوظيفة.
تتيح وحدة التحكم الصناعية هذه (المشار إليها فيما يلي باسم الكمبيوتر) خدمة أربع غرف (مجموعات) مستقلة مع عدد كبير من أجهزة استشعار العناصر المشغلة.
على وجه التحديد لهذا المشروع لكل مجموعة متاحة:
- 6 أجهزة استشعار درجة الحرارة مجتمعة في كيان واحد لتحديد المتوسط ؛
- 2 أجهزة استشعار درجة الحرارة المستقلة.
- 2 أجهزة استشعار الرطوبة.
- 1 استشعار CO2.
- 12 قناة تحكم للمشغلات الخارجية.
أيضا العديد من أجهزة استشعار الشوارع:
- 2 أجهزة استشعار درجة الحرارة المستقلة.
- 2 أجهزة استشعار الرطوبة.
في المجموع ، اتضح أن المتحكم الدقيق يجمع البيانات من 48 مستشعرًا ويتحكم في 48 مشغلًا. جميع أجهزة استشعار درجة الحرارة التناظرية. أجهزة استشعار الرطوبة و CO2 لديها واجهة الحالية 4-20mA.
الآن دوائر صغيرة. بالنسبة لأجهزة التبديل بالتبديل ، تقرر استخدام مُضاعِف التردد التناظري HCF4051 (لديهم تأخير في التبديل ، لكن هذا لم يكن مهمًا لمهمتنا). هذه السلسلة التي تم إيقافها بالفعل ، فرقها ، على سبيل المثال ، من CD4051 فقط في سرعة التبديل (حسنا ، في الشركة المصنعة). هناك ستة من هذه المضاعفات في وحدة التحكم. يحدث تبديل جميع معددات الإرسال في وقت واحد (من نفس أرجل متحكم) ، مما يقلل بشكل كبير من الموارد ووقت القراءة. على متحكم ، على التوالي ، وتشارك ست قنوات ADC.
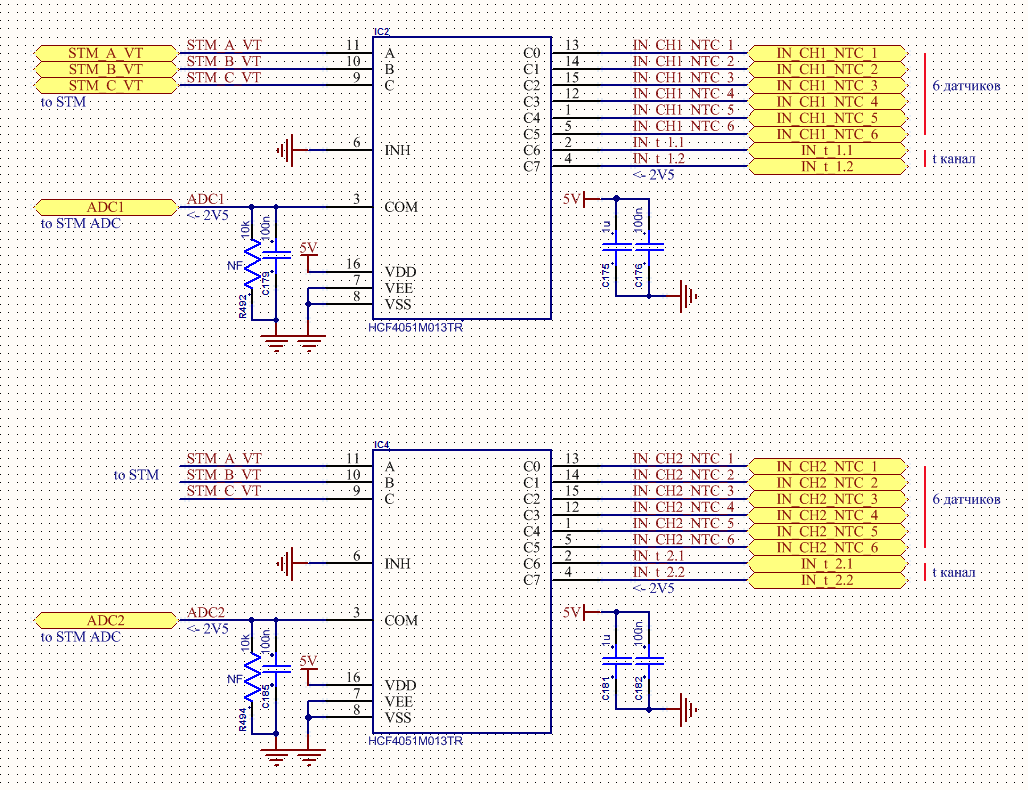 الشكل 2. معدد تبديل الدائرة
الشكل 2. معدد تبديل الدائرةلكل مستشعر درجة الحرارة ، يتم استخدام مصدر جهد مرجعي منفصل TL431 (في الحزمة SOT-23) ، وبالتالي ، مع وجود دائرة قصر على أحد المستشعرات ، يستمر الآخرون في العمل كما كان من قبل. لتوفير الطاقة لجميع oporniku تستخدم LM1117 3.3V. يتم تشغيل اللوحة من مصدر DC24V خارجي ، وبالتالي ، بالنسبة لامدادات الطاقة الثانوية ، يتم استخدام جهازي DC / DC TPS54560DDAR متطابقين (يشكلان 12V و 5 V) ، حيث أنني لا أستخدمهما في المشروع الأول. تم الحصول على 3.3 فولت من 5 فولت باستخدام ST1S10.
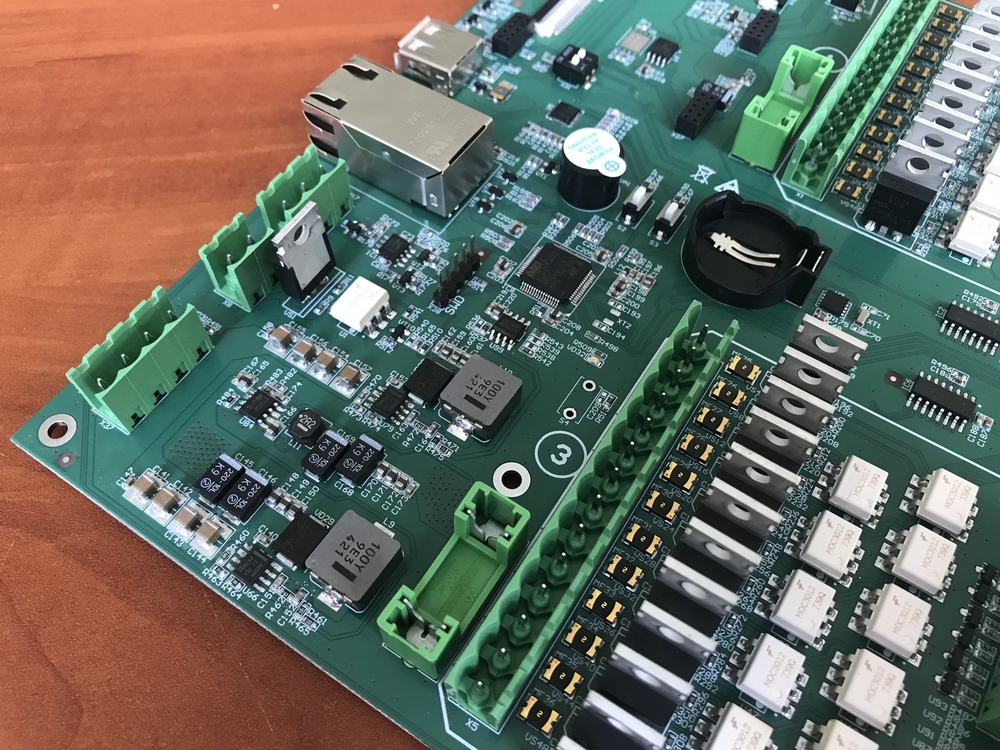 الشكل 3. موقع مغذيات على متن الطائرة
الشكل 3. موقع مغذيات على متن الطائرةللتحكم في الأحمال الخارجية ، عادةً ما تستخدم المرحلات ، ويتم تشغيلها عن طريق تزويد التيار المتردد بجهد 24 فولت. لذلك ، يتم توفير AC24V لكل مجموعة ، والتي يتم تبديلها بواسطة triac BT138-600 عبر العزلة optocoupler. ويرد المخطط أدناه. كل شيء يعمل بشكل مستقر.
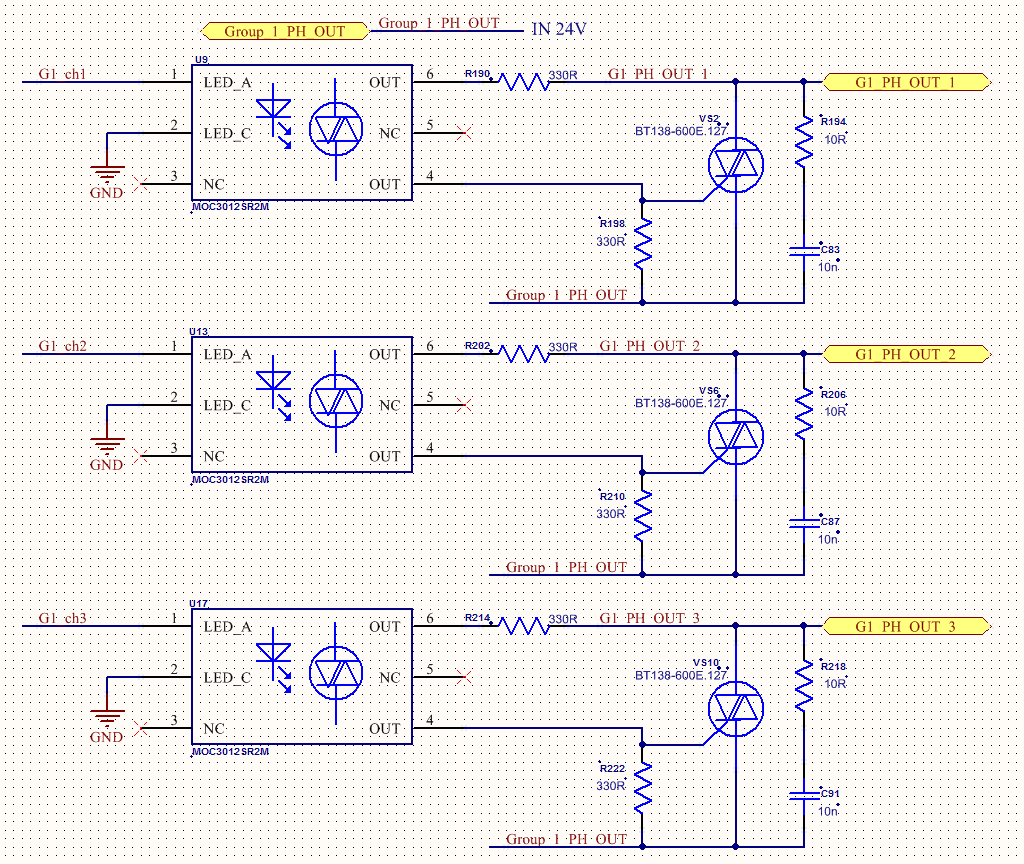 الشكل 4. دائرة التحكم التيرستورات
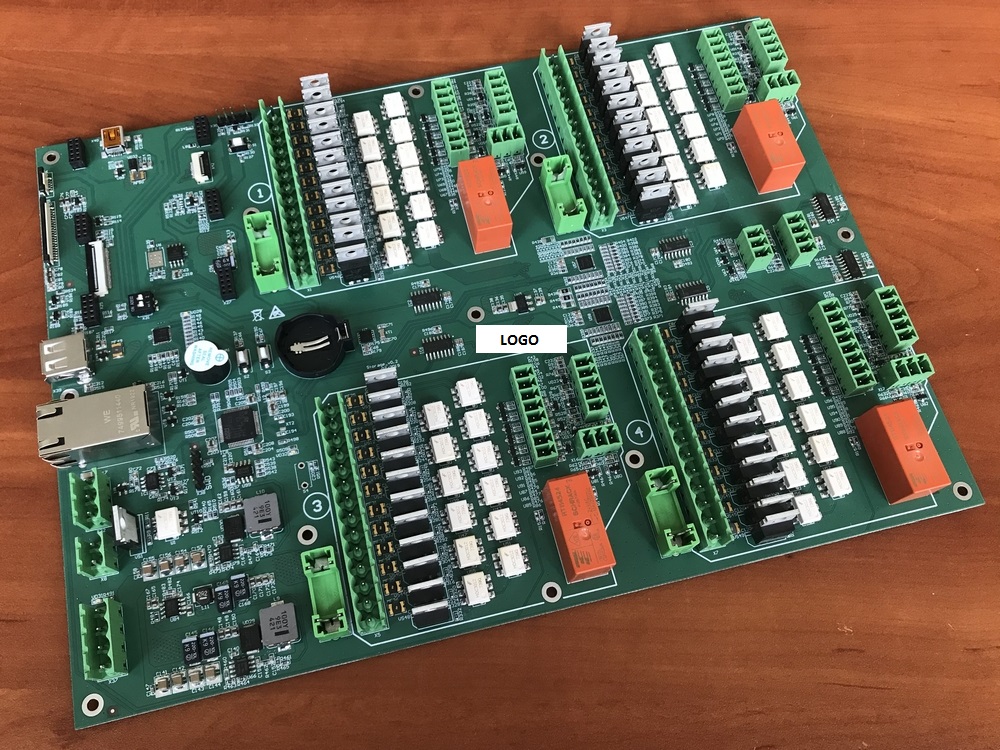
الشكل 4. دائرة التحكم التيرستورات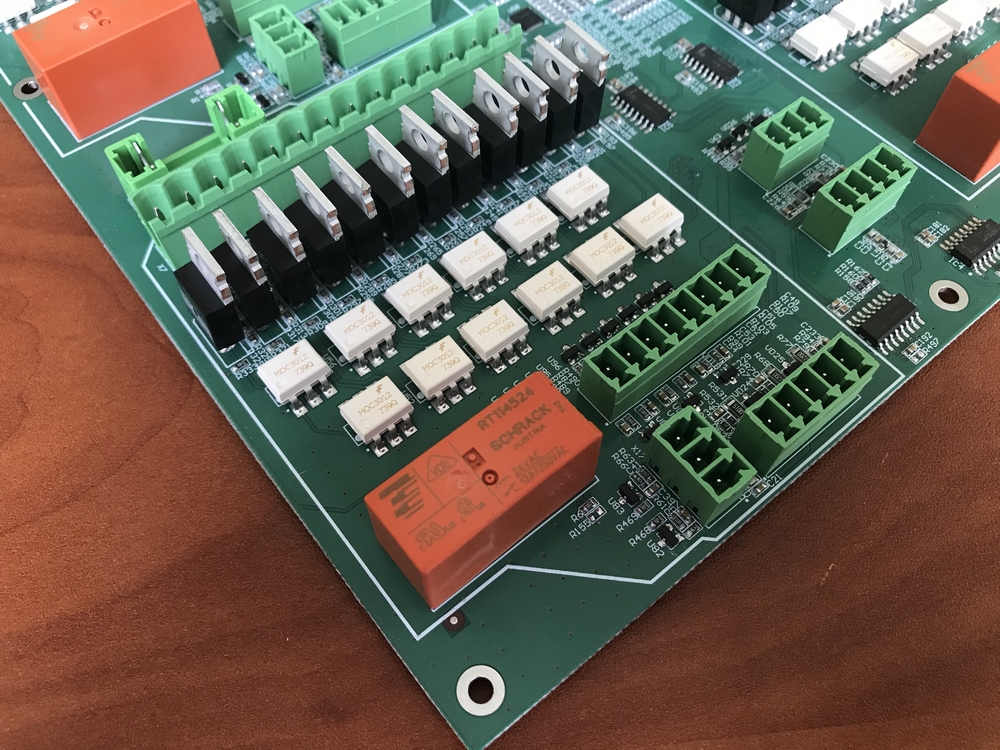 الشكل 5. مجموعة من أجهزة الاستشعار وموصلات التحكم على متن الطائرة
الشكل 5. مجموعة من أجهزة الاستشعار وموصلات التحكم على متن الطائرةيتم تخزين برامج الإدارة على EEPROM منفصلة متصلة متحكم. يتم تخزين المعلمات الأولية أثناء البداية الساخنة والحالة الأخيرة للنظام بأكمله هناك (بحيث يمكن الاستمرار في تنفيذ البرنامج).
من الواضح أن المتحكم الدقيق لا يحتوي على ما يكفي من GPIO للتحكم في العديد من أدوات optocouplers (وليس إنسانياً لسحب العديد من الأسلاك عبر اللوحة) ، لذلك يتم استخدام موسعات منافذ TCA6424ARGJR ، واحدة لمجموعتين ونظام واحد (معالجة إشارات الإدخال المتعددة ، وأزرار نظام المعالجة ، مؤشرات LED ، وما إلى ذلك).
التتابع ، وهو مرئي بوضوح في الشكل 5. (واحد لكل مجموعة) ، يستخدم لتحديد وجود مدخلات الجهد AC24V وصحة الصمامات لكل مجموعة. عندما يتم تشغيله ، فإنه يرسل إشارة إلى متحكم ، والذي بدوره ، يخطر خلل.
تتم مزامنة الوقت باستخدام بروتوكول NTP ، ولكن هناك أيضًا شريحة RTC PCF8523 (تستخدم أيضًا بشكل متكرر) لحساب الوقت في حالة عدم وجود جهد تزويد.
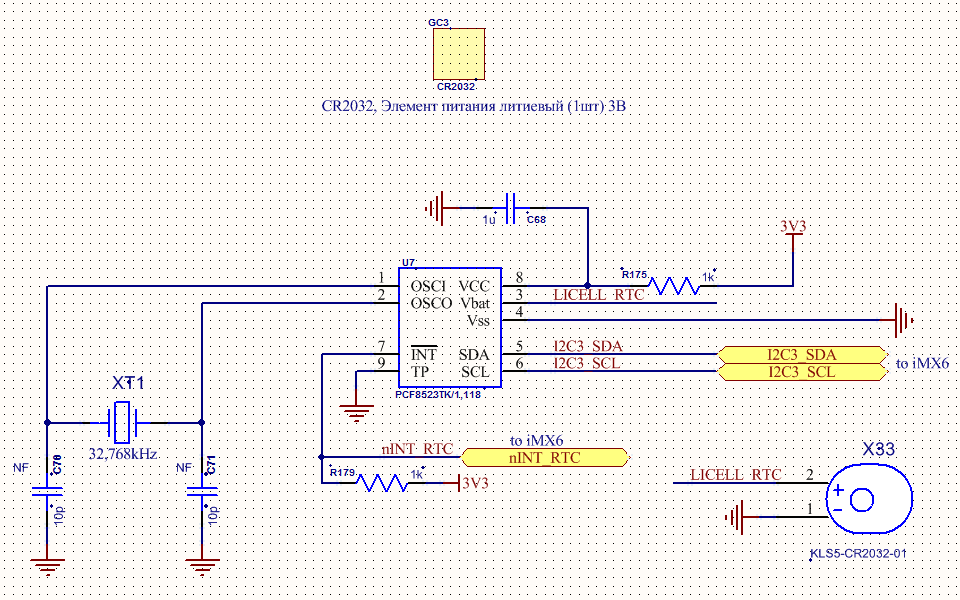 الشكل 6. دائرة RTCعرض
الشكل 6. دائرة RTCعرضيتم التحكم في جهاز الكمبيوتر بسرعة باستخدام شاشة تعمل باللمس وعن بعد عبر الويب. كما قلت ، واجهة المتصفح (هذه الوظيفة لا تزال قيد الإعداد) تكرر الشاشة. في الوقت الحالي ، يتم كتابة تطبيق في Qt ، والذي يتصل بجهاز الكمبيوتر مباشرة عبر mqtt وهو أقرب ما يكون إلى الواقع. في الويب ، في الوقت الحالي ، هناك إعدادات عامة للجهاز وتنظيم الوصول وتحديثات البرامج.
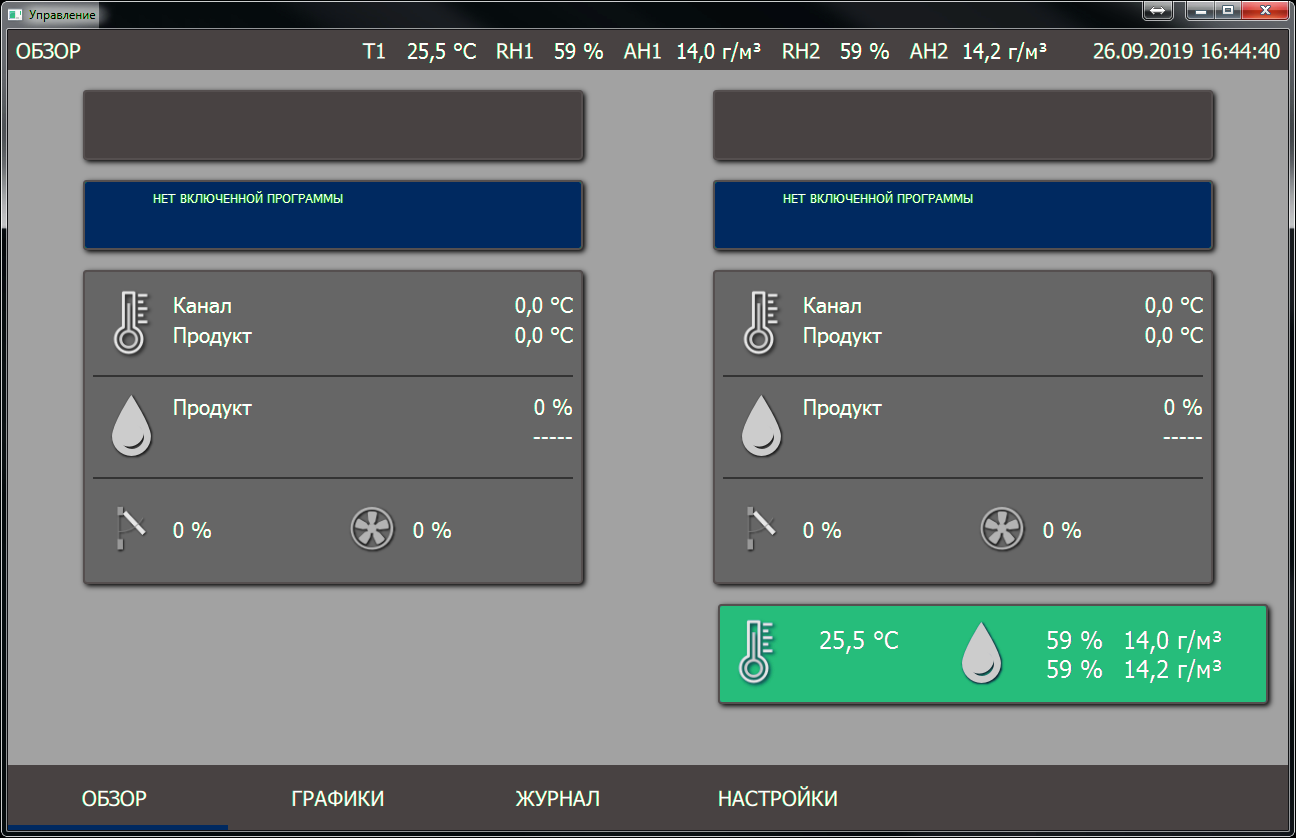 الشكل 7. عرض البيانات في التطبيق على كيو تي
الشكل 7. عرض البيانات في التطبيق على كيو تي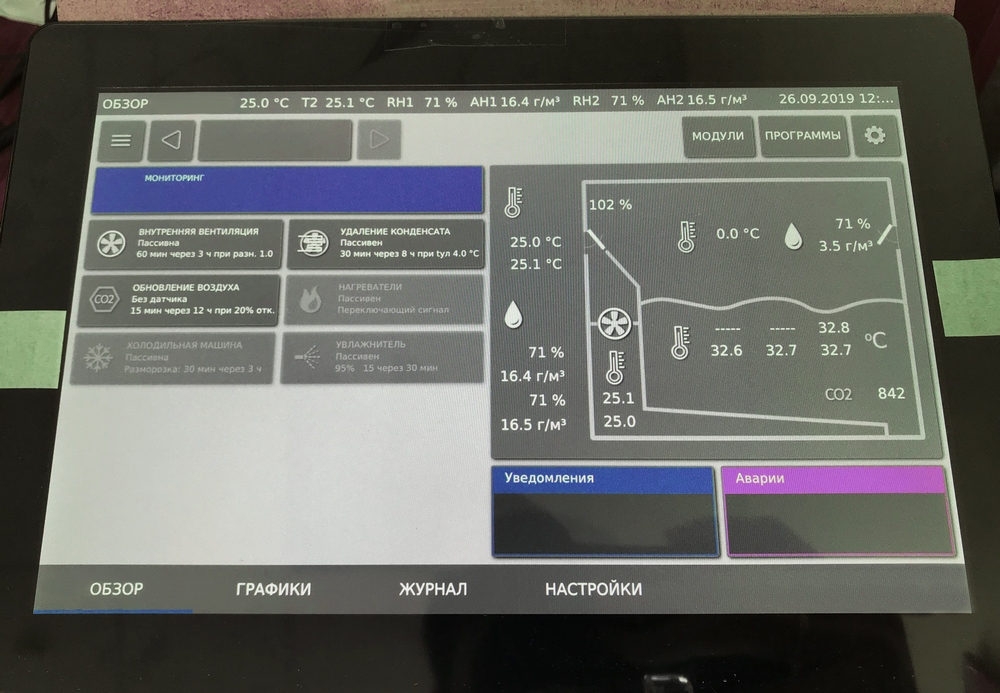 الشكل 8. عرض البيانات
الشكل 8. عرض البياناتهذه الأنواع من وحدات التحكم تسمح لك بإنشاء ACS كاملة للمجمعات الصناعية. تختلف الوظائف ومجموعة من المستشعرات ، كقاعدة عامة ، مع المهام المطلوبة وتتوافق معها ، ولكن الغرض هو نفسه - المراقبة و / أو التحكم. بالنسبة للأنظمة الكبيرة ، يمكنك زيادة عدد وحدات التحكم الموحدة بواسطة مهمة واحدة. قد لا تحتوي وحدة التحكم على شاشة عرض ، ولكن يمكن التحكم فيها عبر شبكة (Ethernet).
 الشكل 9. حزب صغير
الشكل 9. حزب صغيرشكرا لك ونراكم قريبا