 أبولو 11 على سطح القمر
أبولو 11 على سطح القمربعد خمسة أشهر ، نجا أبولو 12 من صاعقة البرق أثناء التسارع وجلس على سطح القمر. بفضل "الاسم 69" الجديد الذي قمنا بإضافته إلى البرنامج من أجل السماح للفريق بتغيير وضعه استنادًا إلى بيانات التتبع الأرضي ، تمكن رواد الفضاء بيت كونراد وألان بين من الهبوط على الوحدة القمرية على مسافة قريبة من الطائرة بدون طيار السفينة المساح ، التي هبطت على سطح القمر في أبريل 1967. مهد الهبوط الدقيق لأبولو 12 مهد الطريق للهبوط على أرض أكثر تعقيدًا.
فقط بعد Apollo 12 بدأنا في فهم المشاكل الخطيرة الأخرى.
بدأت عندما لاحظ كلينت تيلمان من Grumman Aerospace (شركة بناء الوحدة القمرية) اهتزازات الخانق أثناء محاكاة مرحلة الهبوط النهائية عندما كان اتجاه المحرك نحو 5٪. دفع هذا تيلمان إلى دراسة بيانات القياس عن بعد في أبولو 11 و 12 ، حيث لاحظ تقلبات في المرحلة الأخيرة من الهبوط ، بسعة 25 ٪ من الذروة إلى الذروة (انظر الشكل 12). كانت هذه فترة تمكن قائد السفينة من استخدام مفتاح ROD في وقت واحد للتحكم في سرعة الهبوط وعصا التحكم في مناورة السفينة. نظرًا لأن الرسوم البيانية لهذه البيانات تشبه جدران وأبراج القلعة (أو قلعة الجوز) ، فقد سميت هذه المشكلة باسم "قلعة الخانق".
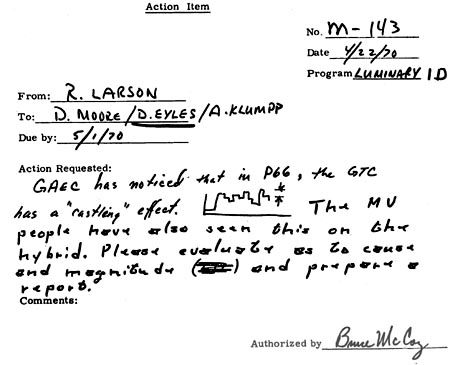
التين. 11: أول تقرير خنق
وصف كلامب في كامبريدج مصدر إثارة التذبذبات لظاهرة غير معروفة ، والتي سماها "IMU bob" [18]. كانت IMU موجودة أعلاه ، وأربعة أقدام أمام مركز كتلة السفينة. قامت مناورات صغيرة ولكن سريعة ، مثل أثناء الهبوط النهائي ، بإلقاء السفينة بحيث فسر مقياس التسارع هذا على أنه تغيير في السرعة الرأسية للسفينة. وهذا بدوره أثر على حساب السرعة الرأسية وتقييم الجر الضروري.
لكن هذه النظرية تشرح جزئياً سلوك الخانق الذي لوحظ في بيانات الرحلة.
كانت محركات الصواريخ الخانقة ولا تزال نادرة ، ولكن كان هناك حاجة إلى محرك الخانق للهبوط الناعم على سطح القمر. يمكن لمحرك الدفع الثابت ومعادلات الحركة البسيطة جدًا الهبوط على السفينة بعد النقطة المطلوبة على سطح القمر. ولكن من أجل الجلوس رأسًا على عقب ، والتحرك بسلاسة ، وإمساك موقع الهبوط في منطقة الرؤية ، ومع إمكانية التمرير فوق موقع الهبوط ، احتجنا إلى محرك يمكنه موازنة الجاذبية القمرية ، وتغيير الجر مع تناقص كتلة السيارة ، وعند تغيير ناقل الاتجاه أثناء المناورات وعندما أراد رواد الفضاء تغيير سرعة الهبوط.
تحدد معادلات الحركة التسارع الواجب إعطاءه للجهاز وبأي حجم وفي أي اتجاه. يقوم الطيار الآلي بإجراء مناورات بحيث تتوافق قوة الجر مع اتجاه معين. مهمة برنامج التحكم في الخانق هي التحكم في الجر. يبدأ التحكم بالاختناق عن طريق حساب كتلة الوحدة القمرية. مع العلم بالكتلة ، نحدد مقدار تصحيح الخانق المطلوب لتغيير تسارع السفينة نسبة إلى تلك المقاسة بواسطة مقاييس التسارع إلى القيمة اللازمة للامتثال لمعادلات الحركة ، وتحويل القيمة الناتجة إلى وحدات تستخدمها مجموعة الخانق (حوالي 2.8 رطل لكل نبضة) ، وإرسالها إلى واجهة الأجهزة.
لا تقيس مقاييس التسارع في IMU التسارع بالفعل ، بل تقيس زيادة السرعة بالنسبة إلى القراءة الأخيرة. نظرًا لأن اختناق التغييرات أثناء التكرار السابق يحدث في مرحلة ما بين قراءات مقاييس التسارع ، فإن دلتا-V المقاسة لا تظهر التأثير الكامل للتغير الأحدث.
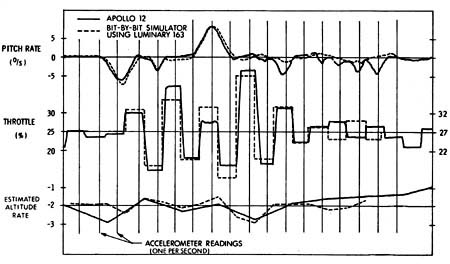
التين. 12: اختناق التغييرات خلال مرحلة P66 من رحلة أبولو 12 [19]
كان من المفترض السيطرة على الاختناق لتعويض هذا التأثير. تعتمد سلسلة من التعويضات على وقت إرسال أمر التحكم أثناء الفترة الزمنية ، وكذلك تعتمد على السرعة التي ينفذ بها المحرك أوامر التحكم. أثبتت الدراسات التجريبية أن الاختناق له تأخير قدره 0.3 ثانية.
هذا سمح للمؤلف بالبرمجة واختبار برنامج التحكم في الخانق. في الرسوم البيانية لمحاكاة نموذج DPS الدقيق باستخدام تأخير 0.3 ثانية ، لاحظت التذبذبات في الاتجاه الحقيقي الذي حدث بعد حدوث تغيير كبير في موضع الخانق ، دون تعويض تأخير الخانق. عندما قمت بتشغيل التعويض عن 0.1 ثانية ، رأيت كيف انخفضت التذبذبات. عندما أضبط التعويض على 0.2 ثانية ، اختفت التذبذبات تقريبًا. كان هذا في كل مكان. يتذكر Klump كيف قلت: "إنه مثل الدواء ، لست بحاجة إلى منح تعويض أكثر من اللازم."
كان كلومب يعلم أنه لم يكن "مثل العلاج" ، لكنه لم يصر أبداً على أن أبرمج القيمة الصحيحة. يشرح كلومب دوافعه بعد 15 عامًا:
"اعتقدت أنه من المهم بناء الثقة بالنفس ، للسماح للزملاء باتخاذ القرارات بشأن القضايا الصغيرة ، حتى لو لم تكن مثالية. لذلك ، حجبت أفكاري وأيدت قرار دون المعمول به ، على الأقل حتى قام بمراجعته من تلقاء نفسه "[20].
شرحًا لدوافعي الخاصة ، أعتقد أنني غضبت من التعويض في برنامج الاختناق المثقل بالفعل ، وقد يكون هذا قد أدى إلى الرغبة في جعل التعويض أصغر ما يمكن. ومهما يكن الأمر ، فقد طار كل من Apollo 11 و Apollo 12 مع تعويض قدره 0.2 ثانية مع تأخير خنق قدره 0.3 ثانية.
لكن الآن خلص كل من تحليل كلومب [21] وتقرير مستقل أعده ج. أ. سورنسن في بيلكوم [22] إلى أن "الطبيعة التذبذبية للأمر الخانق P66 ترجع بشكل واضح إلى حقيقة أن القيمة الفعلية ثابت وقت محرك الهبوط أقل من المتوقع "(سورنسن). Klump إعادة فحص البيانات. تم تحسين معلمات محرك الهبوط ، ولكن لم يتم إجراء التغييرات المقابلة على الوثائق. التأخير الفعلي لمحرك الهبوط كان حوالي 0.075 ثانية. اتضح أننا حتى التعويض. ونتيجة لذلك ، كان الخانق على وشك الاستقرار.
أعطى تحليل كلامب نتيجة أكثر إثارة للدهشة. لقد أظهر أنه إذا تم تعويض برنامج Apollo 11 عن 0.3 ثانية ، فسيكون الخانق غير مستقر. الاهتزازات الخانقة ، بدلاً من التهدئة ، ستصبح أكبر. بعد الاختناق في P63 أو ، ربما ، في P66 عندما تم تنشيط وحدة IMU ، يتأرجح محرك DPS بسرعة بين الحد الأدنى والحد الأقصى. مما لا شك فيه ، فإن التحكم في الطيران يربط منطقيا دواسة الوقود مع أجهزة الإنذار 1202 ، والتي لها أسباب مستقلة تماما.
حادث سيكون حتميا. في رأيي المتواضع ، إذا كان المؤلف قد شفر القيمة "الصحيحة" في برنامج التحكم في دواسة الوقود ، فلن يجلس أبولو 11. أدعو شخص ليس لديه مصلحة شخصية ولديه دراية جيدة في الرياضيات للتحقق من هذه النظرية.
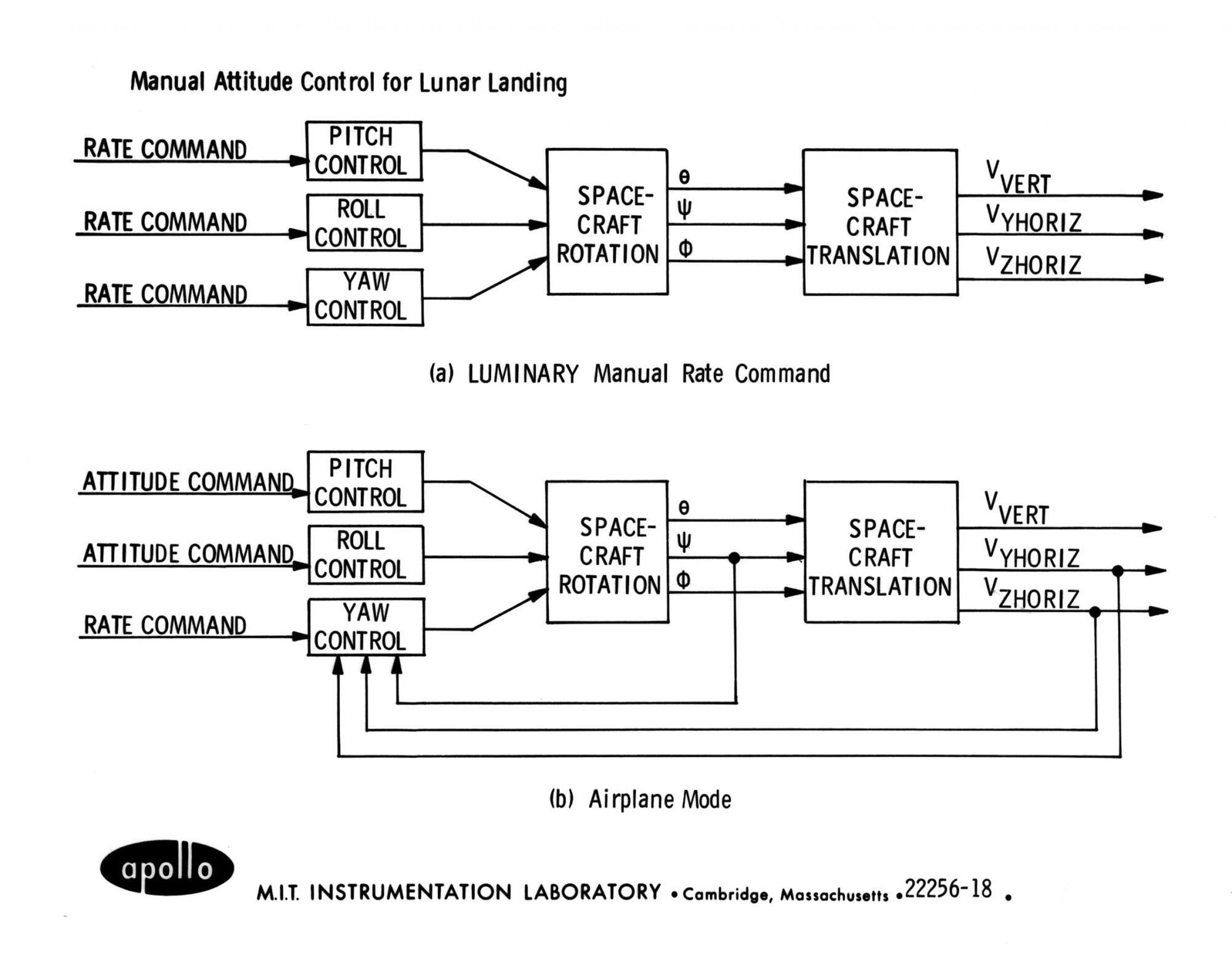
الهبوط اليدوي للقمر
* * *
قمنا بضبط تأخير الخانق ، وأظهرت المحاكاة أن عدم استقرار موضع الخانق قد اختفى. تم إجراء تغييرات على برنامج مهمة Apollo 13 ، لكن هذه المهمة لم تهبط على سطح القمر.
من الغريب أن يتم إجراء تغيير في برنامج Apollo 13 قبل أن تصبح مشكلة الخانق معروفة ، ويمكن أن توفر خيارًا احتياطيًا إذا لم تنجح أتمتة التحكم في الخانق. تم تعريف "الاسم 92" الجديد ، والذي يمكن للطاقم اختياره لمعرفة مستوى دواسة الوقود الذي ينتجه نظام التحكم. تم حذف المنطق الذي سيوقف التحكم التلقائي إذا تم تبديل دواسة الوقود إلى وضع MANUAL. تسمح هذه التغييرات [23] لرائد الفضاء بالتحكم في دواسة الوقود خلال المرحلتين P63 و P64 ، بينما يستمر نظام التحكم في التحكم في حركة السفينة. لا أعرف ما إذا كانت هذه الإجراءات المعقدة قد استخدمت من قبل.
تمت معالجة إنذارات التحميل الزائد التنفيذية عدة مرات.
كان مفتاح رادار القرب في موضع LGC أثناء الإقلاع. في البعثات اللاحقة ، تم تغيير قائمة المراجعة. أضفنا المنطق إلى LUMINARY للتحقق من وضع تشغيل رادار القرب ، وإذا لم يكن LGC ، فتم إعادة تعيين عدادات رادار القرب إلى الصفر.
درس آلان كلومب المدير التنفيذي من منظور مختلف. وجد أنه عندما يحدث TLOSS لجهاز الكمبيوتر بشكل دوري ، أو عندما يتغير مستوى نشاط الكمبيوتر في وجود TLOSS ، ولم يتم إكمال مهمة SERVICER ، وانقطعت عند تنفيذ أوامر حساب الموضع لإرسالها إلى الطيار الآلي ، لم يتم مسحها من خلال إعادة تشغيل البرنامج من أجل لاستعادتها لاحقًا - في ظل هذه الظروف ، كانت هناك فرصة لإجراء عملية حسابية غير صحيحة للمركز الآلي. بالنسبة لرحلة Apollo 13 ، طور Klump حلاً تم فيه إعادة ضبط جميع أعمال SERVICER للحاق بالركب إذا لزم الأمر.
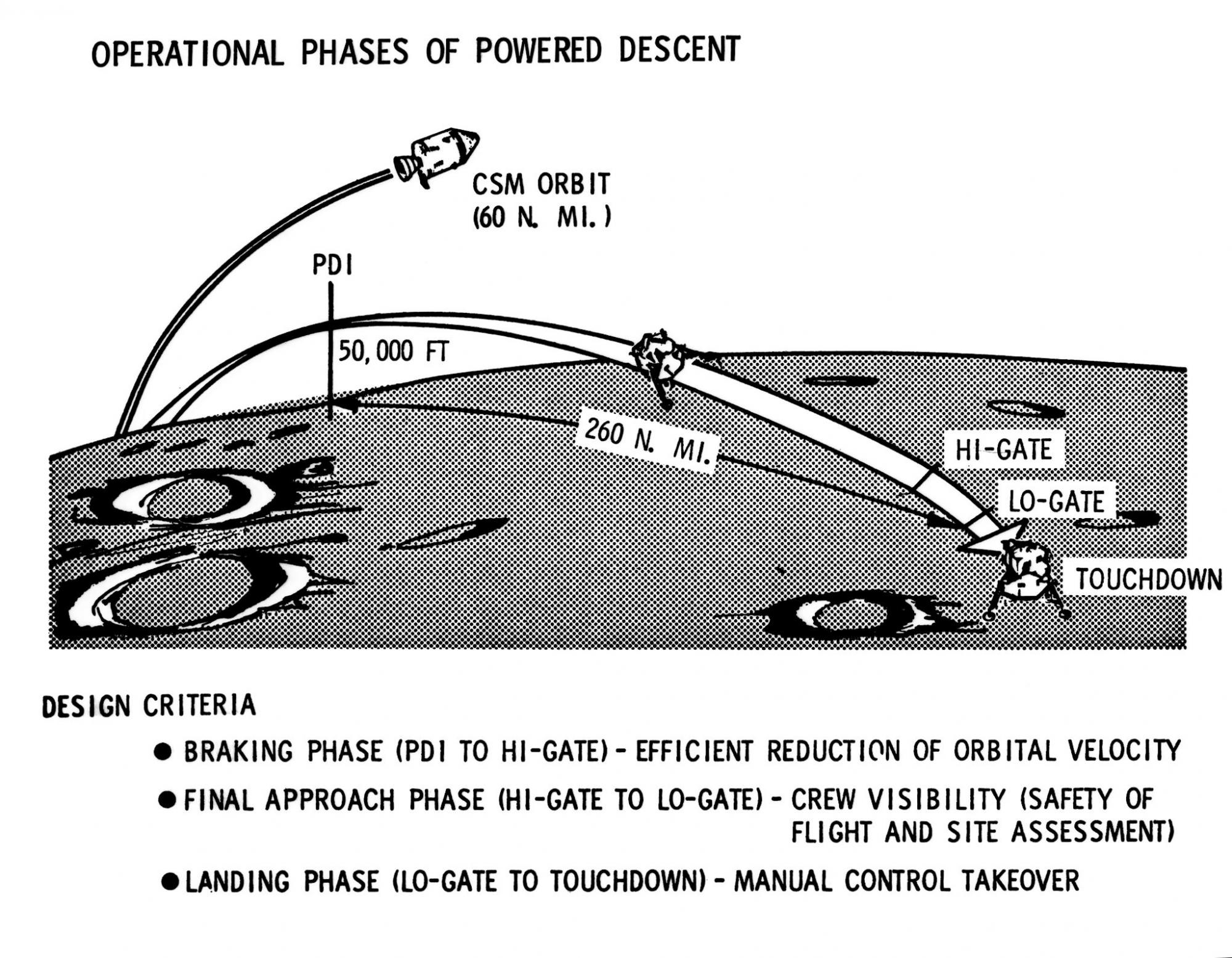 مراحل هبوط القمر
مراحل هبوط القمرلكن في المستقبل ، لم يحررنا أي من هذه التغييرات من القيود المفروضة على فترة زمنية محددة لمدة ثانيتين لنظام التوجيه. للهبوط على التضاريس الصعبة ، كان من الضروري إضافة نموذج تضاريس إلى برنامج الرادار. تم ترك التعديلات على نظام التوجيه في وقت لاحق. لم يكن لدينا وقت لكل شيء.
لقد طورنا مفهومًا أطلقنا عليه اسم "متغير SERVICER" ، حيث يمكن تمديد فترة برنامج التوجيه إذا لزم الأمر. تبين أن المخاوف من تثبيت الفاصل الزمني الثاني في البرنامج بإحكام لا أساس لها من الصحة. كان من الضروري فقط قياس فترة تشغيل نظام التوجيه ، واستخدام هذه القيمة بدلاً من قيمة الثواني ، والتي يتم استخدامها في صيغ قليلة فقط. قمنا بتطبيق إصدار العمل من SERVICER في الإصدار غير المتصل من LUMINARY ، وأظهرنا مقاومته العالية جدًا لـ TLOSS [25].
التحرر من الحد الثاني المسموح به هو التفكير في الأفكار الأخرى. اقترح رائد الفضاء جون يونغ تحسنا ، والذي أطلقنا عليه P66 LPD. ولكن بحلول هذا الوقت ، كان P66 برنامجًا أكثر مرونة من رحلة Armstrong’s Apollo 11. ومن الميزات الجديدة أنه إذا قام الفريق بتبديل وضع ATT HOLD إلى AUTO ، فإن نظام التوجيه سينتج عنه سرعة أفقية صفرية. كانت فكرة يونغ تتمثل في عرض LGC لزاوية LPD (كما في المرحلة المرئية) ، والتي من شأنها أن تُظهر للقائد النقطة التي تطير فوقها الوحدة القمرية إذا تم تحويل الطيار الآلي في تلك اللحظة إلى AUTO [26].
لضمان الدقة في أداء هذه الوظيفة ، كان على البرنامج أن يتفاعل على الفور عندما تحول رائد الفضاء إلى AUTO ، أسرع من ثانيتين ، وحتى أسرع من الفترة الثانية المسموح بها ، والتي عملت معها بعض أجزاء P66. لقد طورنا إصدارًا تم فيه إطلاق مهمة كل ربع ثانية ، وفحصنا تغييرًا في وضع الطيار الآلي ، وأرسلنا أوامر التوجيه وخانق ، وقمنا بالرد بأسرع ما يمكن وبدقة على المدخلات من مفتاح ROD. في محاكاة مأهولة تعمل على محاكي الوحدة القمرية (LM Mission Simulator، LMS) على رأس كانافيرال ، مع نماذج التضاريس الرائعة التي تظهر في النوافذ ، أظهرنا أن هذا النظام يسهل الهبوط الدقيق للغاية.
لم يتم تصحيح "متغير SERVICER" ولا P66 LPD. قررت ناسا أن أبولو 17 سيكون الأخير. مع وجود عدد قليل جدًا من المهام المتبقية ، اتخذ مجلس الإدارة قرارًا محافظًا - يجب ألا يكون هناك أي تغييرات مهمة على برنامج الهبوط. من خلال مزامنة البيانات الواردة من رادار الهبوط مع قراءة مقاييس التسارع ، حرر روبرت كوفيلي وقتًا كافيًا للضغط على نموذج التضاريس لـ Apollos 15 و 16 و 17 هناك.
 الوحدة بالقصور الذاتي (IMU) في معهد ماساتشوستس للتكنولوجيا
الوحدة بالقصور الذاتي (IMU) في معهد ماساتشوستس للتكنولوجياجلبت أبولو 14 للمؤلف شهرة على المدى القصير. أرسل مفتاح المقاطعة الخاص بلوحة القيادة إشارة دورية تمنع آلان شيبرد وإد ميتشل من الجلوس. كتبت الرمز الذي يراقب هذه الحالات. لقد غير هذا "العكاز" ببساطة عدة سجلات ، أول من خدع مراقب مقاطعة المهمة إلى الاعتقاد بأن الانقطاع قد حدث بالفعل ، ثم حذف نفسه بحيث يمكن أن يستمر الهبوط دون عواقب. تم بث التصحيح على الهواء ووضعه موضع التنفيذ من قبل رواد الفضاء بلا عيوب ، وشمل هذا الإجراء 61 ضربات المفاتيح على DSKY. ربما كان الجزء الأكثر إثارة للاهتمام من حادث أبولو 14 هو عدد الإصدارات المختلفة من هذه القصة. لكن أبولو 14 قصة أخرى.
في ديسمبر 1972 ، ذهبت إلى كيب كانافيرال لإطلاق سفينة أبولو 17. هذه الرحلة الفضائية كانت رائعة. كتبت الكاتبة توم وولف ، بالإضافة إلى المصور آني ليبوفيتز ، قصة قصيرة من أربعة أجزاء لمجلة رولينج ستون ، والتي كانت رائدة "The Right Stuff" [27]. كان إطلاق ليلة واحدة فقط من أبولو. تحترق سماء فلوريدا الضبابية اللون البرتقالي من الأفق إلى الأفق عندما يرتفع زحل الخامس الضخم صعوداً على عمود طوله ربع ميل من اللهب الذي تأرجح في النهاية مثل لهب موقد اللحام.
قضيت عدة أيام في اختبار بعض وظائف LMS التي أطلقنا عليها "برمجة ذاكرة قابلة للمسح". كانت هذه التصحيحات التي كان من المفترض أن تستخدم VACs غير المستخدمة وتصحيح بعض الأخطاء ، إرث الحادث مع Apollo 14. ثم طرت إلى كامبريدج لمراقبة الهبوط.
بعد ذلك ، استمتعت بالاستماع إلى جين سيرنان وجاك شميت ، وهو عالم جيولوجي من خلال التدريب ، واستكشاف القمر في مركبة فضائية ، حيث سافر أكثر من 3 أميال بعيدًا عن مشهد المركبة الفضائية. وكانت هذه آخر مرة سار فيها شخص ما على سطح القمر.
التين. 13: بعض المشاركين.
صورة رائعة ، الصف الأمامي: Vince Megna ، "Doc" Charles Stark Draper ، مؤلف ، Dave Moore ، Tony Cook؛ الصف الخلفي: فيل فيليمان ، لاري بيرمان ، آلان كلومب ، بوب ويرنر ، روبرت لونز ، سام دريك. الصورة الصغيرة ، الصف الأمامي: لاري بيرمان ، بيتر فولانتي ، المؤلف ؛ الصف الخلفي: سام دريك ، بروس مكوي. كما شارك في الفعاليات ستيف كوبس وروميلي جيلبرت وكين جودوين وروس لارسون.
مراجع[1] كلومب ، أ. "دليل نزول أبولو القمري" ؛ معهد ماساتشوستس للتكنولوجيا تشارلز ستارك دريبر مختبر ، R-695 ؛ يونيو 1971.
[2] الكرز ، غيغاواط ؛ "التوجيه الإلكتروني - قانون إرشادي عام صريح ومحسّن للمركبة الفضائية الصاروخية" ؛ مختبر الأجهزة MIT ، R-456 ؛ أغسطس 1964.
[3] بروكس ، كورتني ج. "مركبات أبولو ، تاريخ المركبة الفضائية المأهولة على سطح القمر" ؛ NASA. عام 1979.
[4] سيلفر ، جورج ؛ اتصالات خاصة 2004.
[5] هول ، إلدون سي. رحلة إلى القمر: تاريخ كمبيوتر أبولو غايدنس ؛ AIAA ، 1996.
[6] بلير سميث ، هيو ؛ "تعليمات بلوك II" ؛ MIT Instrumentation Laboratory، AGC4 Memo 9؛ 1 يوليو 1966.
[7] مونتز ، تشارلز أ. "دليل المستخدم للمترجم بلوك II AGC / LGC" ؛ مختبر الأجهزة MIT ، R-489 ؛ أبريل 1965.
[8] Apollo 11 Downlink Data.
[9] Apollo 11 Technical Crew Debriefing؛ ناسا ، 31 يوليو 1969 [استخلاص المعلومات].
[10] النسخ الصوتي الفني من أبولو 11 ؛ ناسا ، يوليو 1969 [صوت].
[11] صوت.
[12] استخلاص المعلومات.
[13] تقرير بعثة أبولو 11 ؛ ناسا ، SP-238.
[14] استخلاص المعلومات.
[15] استخلاص المعلومات.
[16] صوت.
[17] كلومب ، أ. مذكرة بدون عنوان تتعلق بالمؤامرة في الوقت الفعلي لمراقبة نشاط الكمبيوتر ؛ معهد ماساتشوستس للتكنولوجيا تشارلز ستارك دريبر مختبر ، 9 أبريل 1970.
[18] كلومب ، أ. و كالان ، جي. "القضاء على الضوضاء وتعزيز الاستقرار والاستجابة الديناميكية لبرنامج معدل نزول أبولو إل إم" ؛ MIT Charles Stark Draper Laboratory، E-2543، October 1970 [Noise].
[19] الضوضاء.
[20] كلومب ، ألان ؛ اتصالات خاصة 1985.
[21] الضوضاء.
[22] سورنسن ، JA ؛ "تحليل الاستقرار الخطي لمعادلات معدل الهبوط في LM" ؛ Bellcomm Inc.، B70 06074، 25 June 1970.
[23] تندال ، هـ. و. جارمان ، جاك ؛ "إزالة الاختيار من السيارات خنق منفصلة" ؛ طلب تغيير برنامج 1C LUMINARY 1C (PCR) 285 ، 30 سبتمبر 1969.
[24] عيون ، د. "منع RR ECDUs من سرقة دورات الذاكرة LGC" ؛ 1B PCR 848 ، 23 يوليو 1969.
[25] عيون ، دون ؛ "وصف المتغير Servicer" ؛ معهد ماساتشوستس للتكنولوجيا تشارلز ستارك دريبر مختبر ، مذكرة Luminary 139 ، 3 مارس 1970.
[26] عيون ، دون ؛ "Apollo LM Guidance and Assistance pilot خلال المرحلة النهائية من نزول القمر" ؛ معهد ماساتشوستس للتكنولوجيا تشارلز ستارك دريبر مختبر ، E-2581 ؛ مايو 1971.
[27] وولف ، توم ؛ الندم بعد المداري الحجر المتداول 4 يناير 1973.