
تحيات حبريوزري. اسمي يوجين وفي سلسلة من المقالات أريد أن أتحدث عن عملية تطوير واختبار نظام تجنب الاصطدام للمعدات الصناعية والأشخاص الذين يعملون معها جنبًا إلى جنب.
ولكن أولا قصة صغيرة. مدينة واحدة الشمالية هي هائلة لدينا. يوجد في المدينة منجم كبير ، وهو في جوهره المكان الرئيسي للعمل لسكان المدينة. الجمعة ، لقد مر يوم العمل بالفعل في فترة ما بعد الظهر. احتفل عمال المناجم في أفق 720 متر بعيد ميلاد زميل مع شراب من الكحول المهرب إلى الموقع سرا. ثم ذهب أحد عمال المناجم المخمور إلى التهوية قبل أن يذهب إلى السطح ، لكن في هذه العملية تعبت قليلاً وغاب عن القضبان على السكك الحديدية تحت الأرض لنقل الخام. أيقظه قاطرة كهربائية ، لم يلاحظ سائقها في الظلام عامل التعدين المؤسف وهو يغفو عن السكة. نتيجة اصطدام قاطرة كهربائية في أحد عمال المناجم ، فقد رسغه. قصة فظيعة ، والعديد من القصص المشابهة من أجزاء أخرى من روسيا في كل مرة تجعل القادة المختلفين يفكرون. وما الذي يمكن فعله لجعل هذه القصص أقل أو لا أكثر. هذا هو المكان الذي يبدأ فيه طلب النظام ، والذي سوف يحل مشكلة منع إصابة الأجهزة بالناس.
خلفية المشكلة التي دفعتنا للبدء في تطوير مثل هذا النظام في عام 2016 على النحو التالي. التعدين هو واحد من أخطر المهن في العالم. وفي بلدنا ، هذا هو أحد القطاعات الرئيسية للاقتصاد بعد إنتاج النفط والغاز. هناك طريقتان لاستخراج المعادن في جميع أنحاء العالم: مفتوح (سطح) وتحت الأرض.
نحن ، كمطور لأنظمة تحديد المواقع ، نشارك منذ وقت طويل في تحديد مواقع المناجم في المناجم ، وفي الوقت الحاضر ، وفي جميع المناجم تقريبًا ، تم حل مشكلة تحديد المواقع إلى درجة أو بأخرى. لكن الحوادث المتعلقة بتصادم معدات التعدين وضرب المركبات على الموظفين للأسف ما زالت تحدث. في الغرب ، بدأت معالجة هذه القضية مرة أخرى في الفترة 2006-2010 من خلال تطوير وتنفيذ أنظمة تجنب الاصطدام. بادئ ذي بدء ، تم إدخال مثل هذه الأنظمة في المحاجر ، حيث وقعت حوادث مماثلة في كثير من الأحيان هناك. منذ
مارس 2019 ، أصبح تركيب أنظمة تجنب الاصطدام إلزاميًا في روسيا ، ولكن ليس في المحاجر ، ولكن في المناجم. وهنا نأتي في الواقع إلى المعارف التقليدية وطلب مثل هذه الأنظمة.
جميع شركات التعدين في روسيا مطالبة بالامتثال لقواعد السلامة الصناعية. تقوم Rostekhnadzor (الخدمة الفيدرالية للإشراف البيئي والتكنولوجي والذري) بمراقبة الامتثال لهذه القواعد ، وقد أخذنا في الاعتبار بشكل أساسي المتطلبات التي وضعتها هذه الخدمة عند تطوير النظام. ولكن بما أن متطلبات أنظمة تجنب الاصطدام في بلدنا موضحة على
نطاق واسع حتى الآن ، في إعداد المعارف التقليدية من أجل التنمية ، وسيناريوهات الاختبار ومعايير القبول ، اعتمدنا على وثيقة دولية طورتها
EMESRT (المائدة المستديرة لسلامة معدات نقل الأرض) . هذه منظمة تجمع شركات التعدين والوكالات الحكومية ومصنعي معدات التعدين وشركات الخدمات والهندسة في جميع أنحاء العالم.
طورت هذه المنظمة تصنيفًا لأنظمة الإدارة والسلامة للتعدين:
- المستوى 7 - الوعي المشغل
التقنيات التي توفر المعلومات لتعزيز قدرة المشغل على مراقبة وفهم المخاطر المحتملة في محيط المعدات.
- المستوى 8 - الرقابة الاستشارية
التقنيات التي توفر إنذارات و / أو تعليمات لتعزيز قدرة المشغل على التنبؤ بالإجراءات غير الآمنة المحتملة والإجراءات التصحيحية اللازمة. - المستوى 9 - مراقبة التدخل
التقنيات التي تتدخل تلقائيًا وتتخذ شكلاً من أشكال التحكم في المعدات لمنع أو تقليل عواقب الموقف الخطير.
تم اعتماد أساس تطوير النظام وبرنامج الاختبارات اللاحقة وسيناريوهات الاختبار كوثيقة
أنظمة التفاعل مع المركبات ، والتي توضح السيناريوهات الرئيسية والمواقف التي تنشأ أثناء تشغيل المعدات والأشخاص في التعدين والحوادث المحتملة معهم.
عند تطوير نظام لمعدات التعدين ، يجب إزالة المواقف الخطرة التالية أو تقليل الضرر الناجم عنها (التقليل إلى أدنى حد من عواقب الحادث):
- إصابة بسبب تصميم محطة العمل والهياكل الخارجية
- إصابة أو دخول المستشفى بسبب التعب الجسدي و / أو العقلي
- الضرر الناجم عن ضعف الرؤية (بما في ذلك الرؤية المشوهة أو المعطوبة) أو انتهاكًا للتوعية بالمخاطر في ظل ظروف تشغيل مختلفة
- تلف بسبب محدودية أو صعوبة المشاهدة من قِبل مشغل البيئة وتشغيل الأداة
- أضرار التصادم الناجمة عن حركة الأشخاص والمركبات في المنطقة العميقة للمشغل
- ضرر من فقدان استقرار الجهاز أثناء التشغيل والحركة والتعبير
- التلف الناتج عن الاستخدام غير الصحيح لأدوات التحكم في المعدات ، أو المعايرة غير الصحيحة / غير الدقيقة ، أو الصيانة غير الفعالة بسبب سوء التحكم والعروض
- الأضرار الناجمة عن سوء تفسير المعلومات على شاشات العرض أو العلامات
- ضرر ، بما في ذلك الزائد العقلي ، من التحذيرات الفائتة والإنذارات التي يتم تجاهلها أو عدم سماعها
أنها تحتوي على متطلبات ، لكل من النظام نفسه ونوع الأجهزة ، وتصور الإخطارات وطرق الإخطار.
يجب أن تعترف بأن هناك متطلبات أكثر بكثير لأنظمة تجنب الاصطدام مما كانت عليه في النسخة الروسية من قواعد السلامة الصناعية لشركات التعدين (
الأمر الصادر في 11 ديسمبر 2013 رقم 599 بشأن الموافقة على المعايير والقواعد الفيدرالية في مجال السلامة الصناعية "قواعد السلامة للتعدين والمعالجة الصلبة" المعادن " ) ، حيث يتم كتابة نقطة واحدة فقط:
النقطة: 325 تجهز مركبات النقل العاملة في المناجم للتعدين بأنظمة تجنب الاصطدام. يجب أن يوفر نظام تجنب الاصطدام إخطارًا في الوقت المناسب للسائق حول وجود الأشخاص والمركبات داخل دائرة نصف قطرها من مسار السيارة.
إنها قائمة أكبر بكثير من المتطلبات الأولية لنظام تجنب الاصطدام الذي وصفته EMESRT والنظر في هذه المتطلبات في تطوير المنتج الذي يلبي جميع المتطلبات الحالية والجديدة التي يمكن إضافتها إلى الوثائق واللوائح ذات الصلة لمؤسسات التعدين الروسية في المستقبل.
لذلك توصلنا إلى السيناريوهات الرئيسية لعمل المعدات والأشخاص الذين يجب أن يحدد نظام تفادي الاصطدام فيها الخطر ويحذر جميع المشاركين في مثل هذا الموقف.
قائمة سيناريوهات التعدين:- يقع P1-Man بجوار الماكينة مباشرةً
- تتم مراقبة P3-Man عند العمل مع الآلات والمعدات
- P4-Man يجلس داخل أو خارج الكابينة
- نهج L1- أمامي مع آلة دائمة
- L2-الاقتراب من الجهاز عند عكس مع آلة دائمة
- تقارب L3 من سيارتين عند تحريك كل اتجاه
- تقارب L4 من سيارتين عند القيادة واحدًا تلو الآخر
- L5 - مغادرة سيارتين تتجهان نحو بعضهما البعض
- L6 - سيارتان تتحركان للخلف ، مع تجاوز إحدى السيارات الأخرى
- تقارب L7 بين سيارتين متحركتين وتجاوز واحدة منهما
- L8 صفر نهج الرؤية
- تقارب C1 بين سيارتين للقاء بعضهما البعض عند القيادة على طول الطريق مع عدم كفاية الرؤية
- C3 - الاقتراب من مركبة تتحرك إلى الأمام مع مركبة تتحرك للخلف في ظروف الانحناء مع عدم وضوح الرؤية الكافية
- تقارب T1 لسيارتين تتحرك في نفس الاتجاه عند التقاطع
- تقارب T2 بين سيارتين تجاه بعضهما البعض بقصد الدوران عند تقاطع إحدى السيارات
- تقارب T3 لسيارتين تتحرك في نفس الاتجاه عند تقاطع T بزاوية 90 درجة
- تقارب T4 لسيارتين تتحرك في نفس الاتجاه عند تقاطع طريقين تكنولوجيين
- R1-Machine مع أداة العمل الدوارة تعمل بجانب آلة أخرى
- تقوم آلة R2 بإعادة تحميل المواد على جهاز آخر
- تأتي آلة O1 قريبة من الهيكل الثابت أو الجدار أو المعدات الثابتة
- V1-Magin يدخل منطقة محظورة حيث حركة المرور محظورة
- يتحرك جهاز V4 بدون تحكم المشغل
- تنتقل V6-Machine عبر الأراضي التي يوجد بها عدد كبير من السيارات والأشخاص الآخرين ، على سبيل المثال ، ورشة عمل
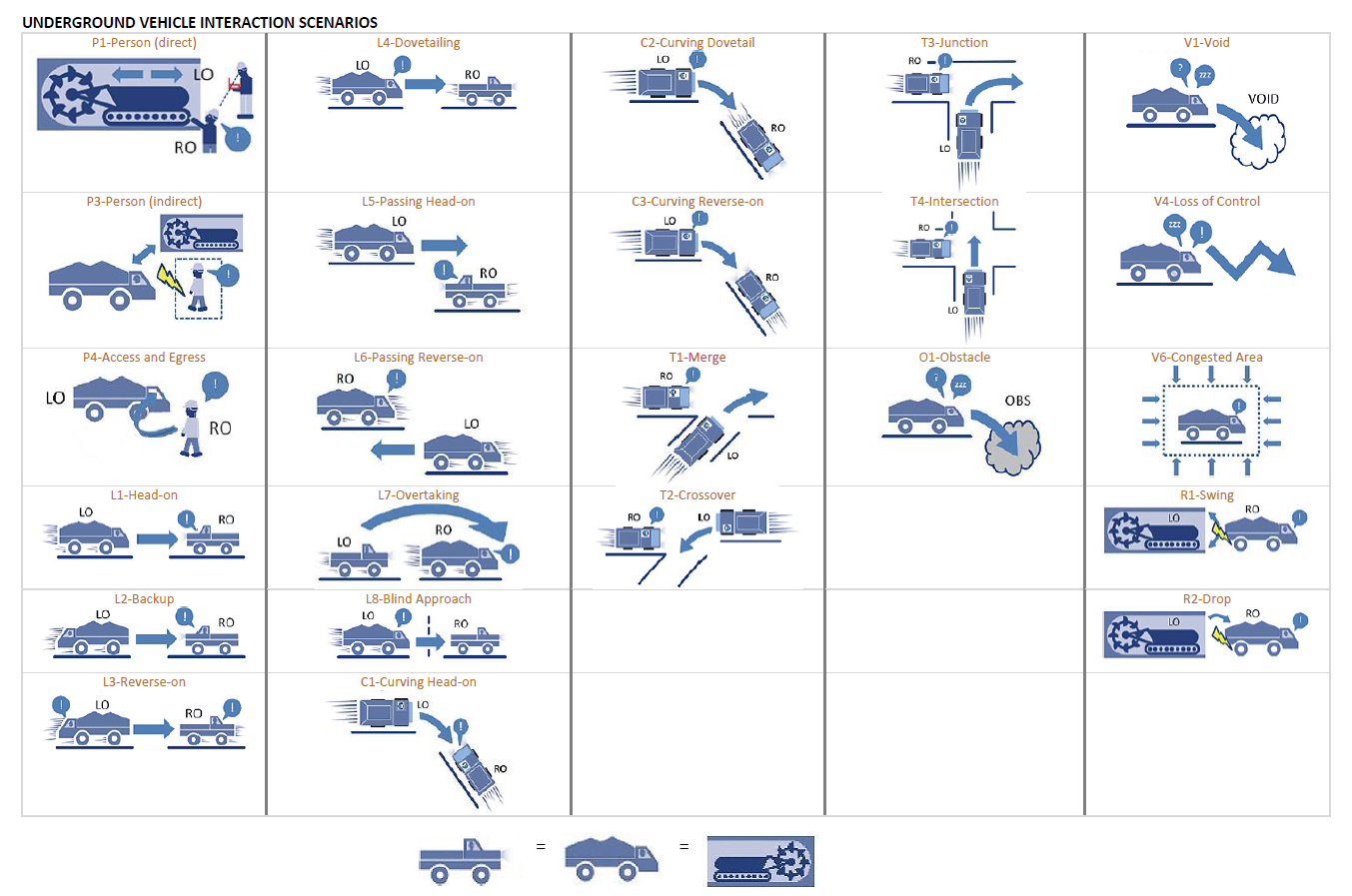
هناك 24 سيناريو في المجموع ، والتي تغطي 99 ٪ من جميع المهام النموذجية التي تم حلها في التعدين تحت الأرض ، حيث يتم استخدام المعدات ذاتية الدفع والمركبات ويمكن للناس أن يكونوا حاضرين.
بعد ذلك ، سوف أخبركم كيف اخترنا التقنيات لتطوير المنتج ، وما الذي يجب علينا أن نمارسه عند إنشائه وما حدث في المخرجات ، وكيف تم اختبار كل من السيناريوهات المذكورة أعلاه.
تقنيات وحلول لإنشاء نظام تجنب الاصطدام
منذ عام 2016 ، قمنا بتطوير أنظمة تجنب الاصطدام ، ويمكنك أن تقرأ عنها في مقالة حول Habré
هنا .
في عام 2016 بدا الأمر مثل هذا خلال هذا الوقت ، قمنا بتغيير التكنولوجيا من تقنية
Nanoloc القديمة إلى
تقنية UWB الواعدة. لقد كتبنا المزيد عن تكنولوجيا UWB على Habré
هنا وهنا .
ما هي ميزة تقنية UWB (UWB) لتحديد موضع الكائنات؟- دقة عالية لتحديد المواقع: ما يصل إلى 10 سم.
- مقاومة انعكاسات الإشارات اللاسلكية في ظروف الرؤية المباشرة.
بحلول عام 2018 ، استنادًا إلى تقنية UWB ، تم تطوير نظام تجنب الاصطدام وذهب في عدة مراحل من التطوير.
بدا الأمر وكأنه هوائي أول نموذجفي المراحل الأولى من التطوير ، تم تصميم لوحة الهوائي في مصباح يدوي لتجهيزات خاصة. تردد فلاش المصباح المحدد في أي منطقة توجد العلامة الشخصية.

"alt =" image "/>
واحدة من مراحل اختبار السكن هوائي جديديتم تشكيل غلاف الهوائي من بوليمر أخضر شديد التحمل. تم اختيار اللون بناءً على حقيقة أنه لا ينبغي العثور عليه في البيئة حيث سيتم استخدام النظام.

يتكون النظام الآن من المكونات التالية:
 العلامة (TAG)
العلامة (TAG) - شريحة تدعم تقنية UWB ، مدمجة في مصباح يدوي عامل التعدين أو جهاز منفصل يستند إليها.
 الهوائي (VBU)
الهوائي (VBU) - مثبت على جلد السيارة. يحتوي أيضًا على شريحة UWB ، والتي تحدد المسافة إلى رقاقة UWB أخرى بواسطة ToF (وقت الرحلة).
 وحدة التحكم (VCU)
وحدة التحكم (VCU) عبارة عن كمبيوتر صغير يقوم بمعالجة القياسات المتلقاة من الهوائيات ، وباستخدام خوارزمية رياضية ، يحدد موقع العلامة المتعلقة بالمركبة ويرسل البيانات لعرضها على شاشة السائق.
 العرض (VOD)
العرض (VOD) - يوفر عرضًا مرئيًا للمعلومات حول موقع العلامات المتعلقة بالسيارة.
في قلب تكنولوجيا تحديد المواقع UWB هي شريحة الشركة الأيرلندية Decawave. تحتوي الرقائق على هوائي خاص بها ، بفضل ذلك يمكنها قياس وقت عبور الإشارة بينها. نظرًا لأن شريحة UWB نفسها موجودة في VBU كما هو الحال في العلامات ، فإنها تكتشف بعضها البعض في وجود رؤية لاسلكية وقياس أيضًا فيما بينها. يسمح لك هذا المبدأ بتحديد وقت طيران الإشارة ، كما هو الحال بين هوائيات المركبات ، وكذلك بين الهوائي والعلامة.
من هنا نحصل على مجالين للتحكم:
- مركبة نقل (مركبة إلى مركبة أو V2V)
- نقل شخص (مركبة إلى أفراد ، V2P)
مبدأ النظام
يعتمد النظام على مبدأ إنشاء 3 مناطق للسيطرة على القرب الخطير. علاوة على ذلك ، يمكن أن تكون المناطق بأي شكل وتأخذ في الاعتبار كلاً من الميزات الهيكلية ومعلمات حركة السيارة.
منطقة الاهتماميحذر العمال من وجود المركبات والمعدات وغيرها على مسافة قصيرة.
يشير النظام إلى نهج خطير محتمل ويسمح للسائق وعمال المناجم بتوجيه الانتباه إلى حقيقة الاقتراب من كائن آخر.
الهوائيات (VBUs) تنبعث منها إشارة في الفضاء حول مركبة UWB بحثًا عن هوائيات أخرى (VBUs) أو علامات شخصية (TAGs) في منطقة رؤية الراديو.
إذا تم اكتشاف هوائيات أخرى (VBU) أو علامة شخصية (TAG) في منطقة "الاهتمام" ، يتم قياس المسافة من الهوائي (VBU) إلى الكائن.
يتم إرسال البيانات المتعلقة بقياسات المسافة إلى وحدة التحكم (VCU) ، حيث يتم حساب موقع الكائنات المكتشفة على مسافة والاتجاه والمساحة.
يتم عرض نتيجة الحساب على شاشة برنامج التشغيل (VOD).
منطقة الاهتمام على الشاشة منطقة الخطريعمل على إصلاح التقارب الخطير ويجذب انتباه العمال ؛ يمكن أن يبطئ من المعدات والنقل.
يخطر النظام بحدوث حادث محتمل ويسمح لك بتوجيه انتباه السائق والعامل إلى حقيقة الاقتراب من كائن آخر.
يرى السائق على الشاشة (VOD) في المنطقة التي يقع فيها الكائن المكتشف وعندما يقترب من السيارة ، سينتقل الكائن من منطقة "الانتباه" إلى منطقة "الخطر" على الشاشة (VOD). في الوقت نفسه ، سيظهر إشعار بالصوت والصوت (VOD) في المقصورة عند دخول الكائن إلى منطقة "الخطر" ، وسيتم تشغيل إشارات الوامض وإنذار الصوت في مقصورة السائق وخارج السيارة. في الوقت نفسه ، سيتم تنشيط تحذير الصوت والضوء أيضًا على العلامة الشخصية للموظف (TAG) أو في مقصورة مركبة أخرى مزودة بمنتج RealTrac Collision Avoidance.
تحطم المنطقةيولد إنذارًا عندما يدخل كائن آخر مجهز بنظام ما إلى منطقة الإنذار.
عندما يدخل كائن من منطقة "الخطر" إلى منطقة "الحوادث" ، يتم تضمين جميع وسائل تنبيه سائق السيارة. تضيء إشارة الخطر الحمراء على شاشة السائق (VOD) وينطلق صوت مسموع دائم. تتضمن علامة التعدين الشخصية (TAG) أيضًا تنبيهات الصوت وتنبيهات الاهتزاز للإشارة إلى أنها في منطقة الحوادث.
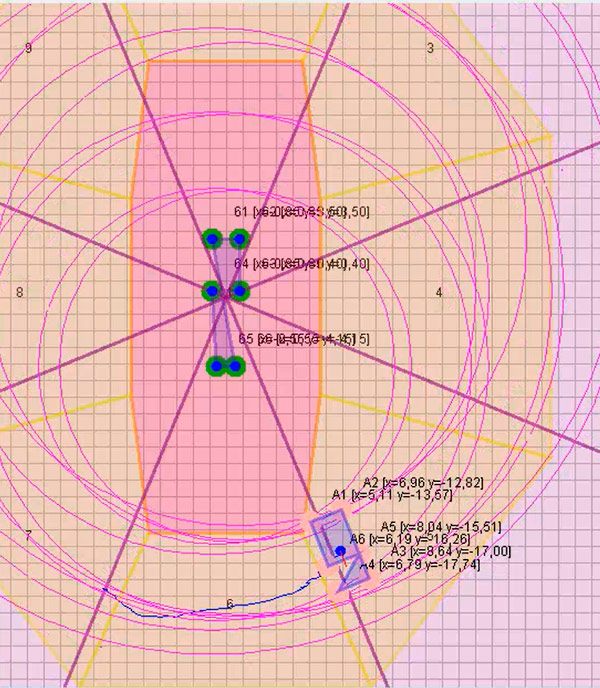
هذا ما تبدو عليه مناطق التحكم في مكون نظام تجنب الاصطدام. تظهر نقاط تثبيت الهوائيات الموجودة على المركبة والعلامة المثبتة على مركبة أخرى. شبكة الملعب 1 م.
هذا هو مبدأ النظام الموصوف نظريا. كيف يبدو كل هذا في الممارسة العملية ، سأقول في الجزء الثاني من المقال في غضون أسبوع.
إذا كان لديك أسئلة ، فاكتب في التعليقات.