المقالة بمثابة ورقة الغش لأولئك الذين يرغبون في جعل البندول العكسي. فيما يلي المشكلات التي أعيد صياغتها عدة مرات ، هناك حاجة إلى لمحة موجزة عن النظرية لفهم كيفية تثبيت النظام.
لماذا أحتاج هذا؟
باختصار: أردت توسيع آلة CNC الخاصة بي ، لكن حدث خطأ ما ...
القصة الكاملةمنذ الطفولة ، أردت أن يكون لدي آلة CNC الخاصة ، لأن تعاملت مع طرازات الطائرات حيث تحتاج إلى عمل الكثير من التفاصيل الصغيرة المتكررة. أولاً اشتريت مجموعة
DIY جاهزة ، ثم قررت زيادتها. لقد لعبت لمدة شهرين ، ولكن لا تزال الآلة صغيرة ، كانت مساحة العمل 18 × 10 سم فقط ، ولا تحتوي على مجسات تحديد المواقع. قررت شراء دليل أكبر ، ووضع مفاتيح الحد وتثبيت العربة في الوسط باستخدام محرك السائر. لقد فعلت ذلك في نصف يوم ، لكن لا يمكنك الذهاب مباشرة إلى الحلم - فبالنسبة إلى CNC كبير ، تحتاج إلى تعقيد المهمة ووضع البندول على العربة ، ثم بدا الأمر سهلاً بالنسبة لي ، لكن كان عليّ أن أتذكر سنوات المعهد والتعرف على TAU.
محاولات فاشلة
استغرق المشروع ما يقرب من عامين من التجربة والخطأ ، وإعادة التصميم ، في انتظار التفاصيل وأيام غير مكتملة حتى يتسنى لأولئك الذين يرغبون في تكرار توفير وقتهم وأعصابهم ، وأعتقد أنه من الضروري التحدث عن القرارات غير الناجحة.
- جيروسكوب (MPU6050) بدلاً من جهاز التشفير - لا شيء ضده بشكل أساسي ، ولكن يجب أن يكون المستشعر موجودًا على قضيب دوار ، وهذا يوفر تأثيرًا لا يمكن التنبؤ به وعدم القدرة على التمرير في القضيب عدة مرات حول المحور.
- التشفير المطلق - إذا كان مقياس الجهد ، فحركة الأسلاك (نتيجة لوجود جهات الاتصال في arduino) تُحدث ضوضاء في القياسات ، لا يزال ADC ذي 10 بتات غير كافٍ ؛ إذا كان المستشعر أكثر تكلفة ، فإن القراءة تتم عبر واجهة تسلسلية ، وهذا يؤدي إلى تأخير في النظام ، خاصةً مع محرك السائر.
- صلابة النظام - في مرحلة ما ، أخذت أنبوبًا من الألمنيوم بحمل في النهاية ، عندما اهتزت العربة ، وبدأت الاهتزازات القوية فيه ، ولم يكن من الواضح على الفور النظام الذي استقرنا عليه. يجب أن نسعى جاهدين للتأكد من أن النظام المادي هو أقرب ما يمكن على غرار ما هو نموذج.
- الاحتكاك - غالباً ما يتم إهمال هذه الظاهرة ، حاولت تقليصها باستخدام عجلات عربة كبيرة ومقاطع فتحة V ، على عكس القضبان مع المتزلجون مع كرات صغيرة ، ل الاحتكاك المتداول يتناسب عكسيا مع نصف القطر.
- استخدام محرك السائر - قضيت الكثير من الوقت في محاولة السير في هذا الطريق ، فمن المضلل تبسيط الصيغ (في الواقع ، نحن نتحكم فورًا في تسارع قاعدة البندول) وبساطة التصميم (يمكننا أن ننسى الاحتكاك في السكة ، ومشفير المحرك ، إذا افترضنا أن المحرك لا يتخطى الخطوات) ، ولكن ... للتحكم الدقيق في السرعة ، يجب أن يكون الوقت الفاصل بين الخطوات هو عشرات من الميكروثانية ، بحيث يمكنك نسيان إخراج الحالة إلى وحدة التحكم. بدون ملاحظات ، لا يمكنك التأكد من أن المحرك لم يفوت الخطوات وأن السرعة هي بالفعل ما يفكر فيه النظام. لا أدعي أن هذا حلاً مسدودًا ، إذا نجح شخص ما في تثبيت البندول بمحرك السائر ، سأكون سعيدًا للنظر فيه.
البندول مجانا
لإكمال الصورة ، نحاكي البندول على عربة مجانية دون احتكاك.
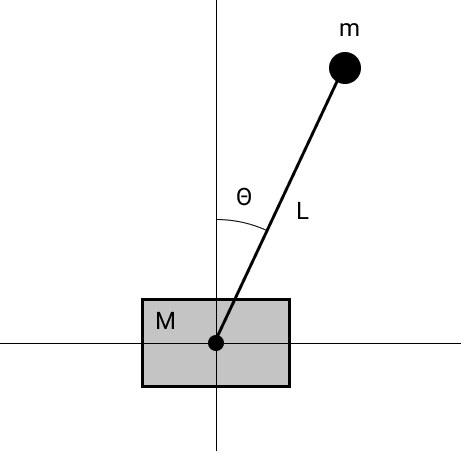
يمكن الحصول على معادلات الحركة من خلال التمييز بين
Lagrangian فيما يتعلق بالإحداثيات المعممة. نحصل على المعادلات التالية:
startcasesL cdot ddot theta+g cdotsin( theta)− ddotx cdotcos(th)=0(m+M) cdot ddotx+m cdot ddot theta cdotL cdotcos( theta)−m cdotL dot theta2 cdotsin( theta)=0 endcases
يمكنك من خلالها معرفة كيفية تغير متجه الحالة:
startcases dot theta=w dotw= fracg cdotsin( theta)+b cdotL cdotw2 cdotsin( theta) cdotcos( theta)L cdot(1+b cdotcos2( theta)) dotx=v dotv=b cdot fracL cdotw2 cdotsin( theta)−g cdotsin( theta) cdotcos( theta)1+b cdotcos2( theta) endcases،b= fracmM+m
ومحاكاة النظام. الكود
هنا .
لماذا النظام غير مستقر؟
يخبرنا المنطق السليم والتصور أن البندول نفسه لن يقف. ولكن كيفية التحقق من ذلك رياضيا؟
بشكل عام ، فإن النظام الخطي والحل هما كما يلي:
dot mathbfx=A mathbfx، mathbfx(t)=eAt mathbfx(0)
يبدو الأس في قوة المصفوفة أكثر وضوحًا إذا ذهبت إلى نظام الإحداثيات من المتجهات الإلكترونية ، ثم المصفوفة
دولا سيكون قطري (
D ) ، وسيظهر العارض مثل:
e ^ {Dt} = \ start {bmatrix} e ^ {\ lambda_1t} & 0 & \ dots & 0 \\ 0 & e ^ {\ lambda_2t} & \ dots & 0 \\ \ vdots & \ vdots & \ ddots & \ vdots \\ 0 & 0 & \ dots & e ^ {\ lambda_nt} \\ \ end {bmatrix}
e ^ {Dt} = \ start {bmatrix} e ^ {\ lambda_1t} & 0 & \ dots & 0 \\ 0 & e ^ {\ lambda_2t} & \ dots & 0 \\ \ vdots & \ vdots & \ ddots & \ vdots \\ 0 & 0 & \ dots & e ^ {\ lambda_nt} \\ \ end {bmatrix}
الآن ينظر إليه ، في وجود القيم الذاتية (
lambdai ) مع وجود جزء حقيقي إيجابي ، فإن العنصر المقابل من متجه الحالة سيميل إلى ما لا نهاية ، وسوف ينهار النظام. ينطبق ما سبق على الأنظمة المستمرة ، ويرد وصف أكثر حول الاستدامة في
هذه المحاضرة المرئية.
تحقق مما إذا كان هذا هو الحال بالنسبة للبندول العكسي. نحن خطي نظامنا بالقرب من موقف التوازن ل
theta=0،sin( theta) approx theta،cos( theta) approx1،w2 approx0 :
\ تبدأ {bmatrix} \ dot \ theta \\ \ dot \ omega \\ \ dot {x} \\ \ dot {v} \ end {bmatrix} = \ تبدأ {bmatrix} 0 & 1 & 0 & 0 \\ \ frac {g} {L (1 + b)} {\ theta} & 0 & 0 & 0 \\ 0 & 0 & 0 & 1 \\ -g \ frac {b} {1 + b} \ theta & 0 & 0 & 0 \ end {bmatrix} \ start {bmatrix} \ theta \\ \ omega \\ x \\ v \ end {bmatrix}
\ تبدأ {bmatrix} \ dot \ theta \\ \ dot \ omega \\ \ dot {x} \\ \ dot {v} \ end {bmatrix} = \ تبدأ {bmatrix} 0 & 1 & 0 & 0 \\ \ frac {g} {L (1 + b)} {\ theta} & 0 & 0 & 0 \\ 0 & 0 & 0 & 1 \\ -g \ frac {b} {1 + b} \ theta & 0 & 0 & 0 \ end {bmatrix} \ start {bmatrix} \ theta \\ \ omega \\ x \\ v \ end {bmatrix}
القيم الذاتية غير الصفرية لها النموذج
pm sqrt fracgL(1+b) ، وبالتالي أصبحنا مقتنعين بعدم الاستقرار.
أضف ملاحظات
الآن القوة ستعمل على النقل
و ، يمكن إعادة كتابة إحدى المعادلات بالشكل:
(m+M) cdot ddotx+m cdot ddot theta cdotL cdotcos( theta)−m cdotL dot theta2 cdotsin( theta)=f وسيأخذ النظام الخطي الشكل:
\ تبدأ {bmatrix} \ dot \ theta \\ \ dot \ omega \\ \ dot {x} \\ \ dot {v} \ end {bmatrix} = \ تبدأ {bmatrix} 0 & 1 & 0 & 0 \\ \ frac {g} {L (1 + b)} {\ theta} & 0 & 0 & 0 \\ 0 & 0 & 0 & 1 \\ -g \ frac {b} {1 + b} \ theta & 0 & 0 & 0 \ end {bmatrix} \ start {bmatrix} \ theta \\ \ omega \\ x \\ v \ end {bmatrix} + \ start {bmatrix} 0 \\ \ frac {1} {L} \ frac {1} {2m + M} \\ 0 \\ \ frac {1} {2m + M} \ end {bmatrix} \ cdot {f}
\ تبدأ {bmatrix} \ dot \ theta \\ \ dot \ omega \\ \ dot {x} \\ \ dot {v} \ end {bmatrix} = \ تبدأ {bmatrix} 0 & 1 & 0 & 0 \\ \ frac {g} {L (1 + b)} {\ theta} & 0 & 0 & 0 \\ 0 & 0 & 0 & 1 \\ -g \ frac {b} {1 + b} \ theta & 0 & 0 & 0 \ end {bmatrix} \ start {bmatrix} \ theta \\ \ omega \\ x \\ v \ end {bmatrix} + \ start {bmatrix} 0 \\ \ frac {1} {L} \ frac {1} {2m + M} \\ 0 \\ \ frac {1} {2m + M} \ end {bmatrix} \ cdot {f}
الآن النظام (
dot mathbfx=A mathbfx+Bu ) أصبحت
قابلة للتحكم ، ويمكن التحقق من ذلك عن طريق التحقق من أن رتبة المصفوفة
\ تبدأ {bmatrix} B && AB && A ^ 2B && A ^ 3B \ end {bmatrix}\ تبدأ {bmatrix} B && AB && A ^ 2B && A ^ 3B \ end {bmatrix} مساوية لبعد ناقل الحالة ، أي 4. للحفاظ على البندول في وضع مستقيم ، استخدمت وحدة تحكم الحالة الخطية من الدرجة الثانية ، أي التحكم (u أو f) هو نتاج متجه الحالة
[ theta، dot theta،x، dotx] بواسطة متجه من المعلمات التي تم العثور عليها مرة واحدة عن طريق
التقليل من الوظيفية التربيعية . رمز المحاكاة
هنا .

التحكم في المحرك
أنت الآن بحاجة إلى التحكم في محرك التيار المستمر ، فهو يحتوي على العديد من المعلمات التي لا أعرفها ، لذلك أخذتها من أجل "الصندوق الأسود" ، الموصوف بالمعادلات التالية ، مع مراعاة الاحتكاك:
startcases dotx=v dotv=−a cdotv+b cdotU+c cdotsign(v) endcases
يمكنك أن تقرأ عن اشتقاق المعادلات وتقدير المعلمة
هنا . أدناه أعطي رسومات بيانية عن تسارع المحرك مع النقل اعتمادًا على الجهد (في الواقع ، يتم إخراج إشارة PWM من وحدة التحكم) والمنحنيات المجهزة.

كما أنني وجدت معاملات النموذج بواسطة القوة الغاشمة ،
الكود .
وبالتالي ، فإن وحدة التحكم تعطينا التسارع المطلوب ، ومن المعادلة الثانية ، ومعرفة جميع الثوابت ، نجد الجهد.
وضع الجهاز الحقيقي معًا
الآن لدينا كل المعرفة لجمع وتحقيق الاستقرار في البندول. لقد استخدمت الحديد التالي:
- اردوينو ميجا 2560 ليس UNO ، لأن اثنين من التشفير يحتاج 4 دبابيس للمقاطعات
- يمنحنا التشفير الخاص بالبندول - نبضات OMRON E6B2-CWZ6C 2500 لكل ثورة - الزاوية ، نحسب السرعة الزاوية ، الدقة عالية جدًا ، لذلك كانت هناك اختلافات محدودة كافية دون تجانس ومتوسط
- يوفر التشفير للمحرك - LPD3806-600BM-G5-24C 600 نبضة لكل ثورة - موضع النقل ، وحساب السرعة
- محرك 12V العاصمة مع علبة تروس 5: 1
- 10Amp 5V-30V Motor Driver
وهكذا ، نقيس بشكل صريح زاوية البندول ، وموضع العربة ، ونحسب السرعة الزاوية للبندول وسرعة العربة - لقد حصلنا على الحالة الكاملة ، لقد وجدت معلمات وحدة التحكم باستخدام
هذا البرنامج النصي. والمثير للدهشة أن كل شيء سار بسرعة كما كان. أنا مرتاح للنتيجة ، فهي تقف بل إنها تحمل كأسًا!
رمز اردوينو
هناما يمكن تحسينه مقارنة بالعديد من الخيارات التي يمكن العثور عليها على youtube - هذا البندول هادئ لأن PWM يتم ضبطه خارج النطاق السمعي ويتم استخدام عجلات بلاستيكية.
تبدو هذه المهمة الآن وكأنها عمل مخبري: لقياس معلمات المحرك والعثور على معاملات المنظم ، وفهم ما يحدث في وقت واحد.
ما التالي؟
أخطط لإنتاج بندول: قم بالتأرجح ، تخلص من لفائف الأسلاك ، وصنع درعًا بموصلات ملائمة حتى لا يكون من العار التبرع لبعض المدارس أو المتاحف. إذا أراد شخص ما الانضمام ، سأكون سعيدًا بوجود العديد من الأفكار الطموحة.
مراجع
شكرا لاهتمامكم!