قصتي هي الانغماس في دراسة الروبوتات وإنشاء روبوت باستخدام طابعة ثلاثية الأبعاد. الأخطاء التي واجهتها وما أود تلقيها كنتيجة لذلك
قبل التاريخ
منذ حوالي 10 سنوات ، في الدورات الأولى من الجامعة ، عندما علمت بوجود اردوينو وتعلمت كيف تطلب البضائع من الصين ، أمرت نفسي بمجموعة أدوات بداية من Arduino Mega ، ومثلما حدث مع أي شخص آخر ، بدأت أتعلم وميض مؤشر LED. حصلت على فرحة شديدة من حقيقة أنه لا يمكنني البرمجة فقط والحصول على بعض الحلول على شاشة الكمبيوتر ، ولكن يمكنني جعل بعض الأجهزة التي يمكن أن تجعل الحياة أسهل. بدأت أفكر في IOT قبل أن أتعرف على مثل هذا المفهوم ومن وقت لآخر فكرت في تنفيذ مثل هذه الأشياء المفيدة. كان أول مشروع على Arduino ، الذي اعتبرته مكتملاً بنفسي ، هو وحدة تحكم ل terrarium مع عنكبوت. الشاشة ، عدة أزرار للتحكم ودرجة الحرارة ومستشعر الرطوبة DHT11 ، أتمتة الإضاءة الخلفية ، التدفئة باستخدام سلك حاضنة وكل شيء. لديّ خبرة في العمل مع pascal في المدرسة ، أحببت البرمجة ، لكنني لم أرغب في ربط الحياة بها مباشرة ، لقد كان ذلك مملًا بالنسبة لي ، ومن الواضح أنني ذهبت للدراسة في التخصص الهندسي ، أو بالأحرى ، تقنيات تصميم المعلومات في NTU "KhPI" .
لقد وعدوا بتوجه متقدم للغاية ، وتقنيات متقدمة ، أخبروا عن مدى طلب هؤلاء المتخصصين وإغراءهم بصور مشرقة للحسابات في Ansys و Solidworks وأنظمة البرامج الأخرى. في الواقع ، الآن ، بعد 6 سنوات من التخرج ، أستطيع أن أقول أنني لست نادما على شيء واحد لأنني اخترت هذا الاتجاه لنفسي. بالطبع ، لم يتم وصف الكثير من الأشياء عند القبول ، لكنني في العام الثالث انتظرت الأشياء التي أعجبتني. لقد أصبحت مهتمًا بدراسة أنظمة CAD ، في أحد الأولمبياد ، حصلت على شهادة CSWA من Solidworks ، دون توتري على الإطلاق وعدم الاستعداد لذلك. لكن بعد التخرج ، تلقيت عرضًا دون خبرة ومعرفة خاصة في البرمجة لشغل منصب مطور .NET للمشاريع المتعلقة بتكامل المكونات الإضافية في Solidworks. ثم 6 سنوات من العمل مع .NET في العديد من الشركات ذات الاتجاهات المختلفة ، وهي محاولة للعمل عن بُعد باستخدام العملات المشفرة ، إلخ. ولكن كل هذا لم يجلب لي السرور. من وقت لآخر ، أدركت أنني أحب عملية أتمتة العمليات اليومية ، لكنني لم أكن أفكر في أي شيء لأفعله ، ليس فقط للعب ، ولكن شيء حقيقي ومفيد. مع مرور السنوات ، استمرت الجامعة لعدة سنوات ، ولم يكن هناك وقت فراغ ، لكن بطريقة ما ، عشية عملية الإصلاح ، قررت أن هذه الفرصة كانت تتمثل في تطبيق معرفتي ومحاولة القيام بشيء مفيد حقًا ، وبدأت في تطوير منزل ذكي. قام بتحديث القليل من المعرفة حول الوضع الحالي في ميكروكنترولر في العالم ، وتعلم عن وجود ESP8266 مع واي فاي على متن الطائرة ، بمجرد بدء التشغيل الأوكرانية Blynk ، مما يجعل من الممكن الحصول على تطبيقات مجانية مشروطة للتحكم في جهاز من الهاتف ، دون خبرة ومعرفة حول تطوير البرمجيات للهواتف. بعد بضعة أشهر تلقيت نموذجًا أوليًا تم تجميعه على لوح ، لكنه كان يعمل بشكل مستقر. لأول مرة ، للاختبار ، تركتها في شكل وحدات مثبتة في صناديق التوزيع. أود أن أكتب أنه بعد الاختبارات في ظروف حقيقية ، قمت بنشر اللوحة وتجميع كل شيء على ما يرام ، ولكن لا ، للعام الثالث كان كل شيء يعمل بشكل مستقر ، لذلك لا أحاول إعادة أي شيء. من بين ما كان مفيدًا لي في هذا الأمر ، أتيحت لي الفرصة للجميع لتوفير الكهرباء تلقائيًا ، بما في ذلك المستهلكون الرئيسيون مثل الغلاية وغسالة الصحون وغسالة الملابس بسعر ليلة. مراقبة درجة الحرارة في كل غرفة ، وبالتالي التحكم في التدفئة في كل غرفة. هناك قام أيضًا بتنفيذ وحدة تحكم للتدفئة الأرضية وإضاءة الشوارع. قبل 3 سنوات ، كلفني هذا الحل بأكمله حوالي 50 دولارًا ، نظرًا لحقيقة أنه لا يكلف سوى وحدة تحكم عادية لأرضية دافئة. لقد منحتني ثلاث سنوات من تشغيل هذا النظام بأكمله الثقة في أنه يمكن استخدام المتحكمات الدقيقة في التطوير ويمكنها العمل بثبات.
المحاولات الأولى لبناء الروبوت
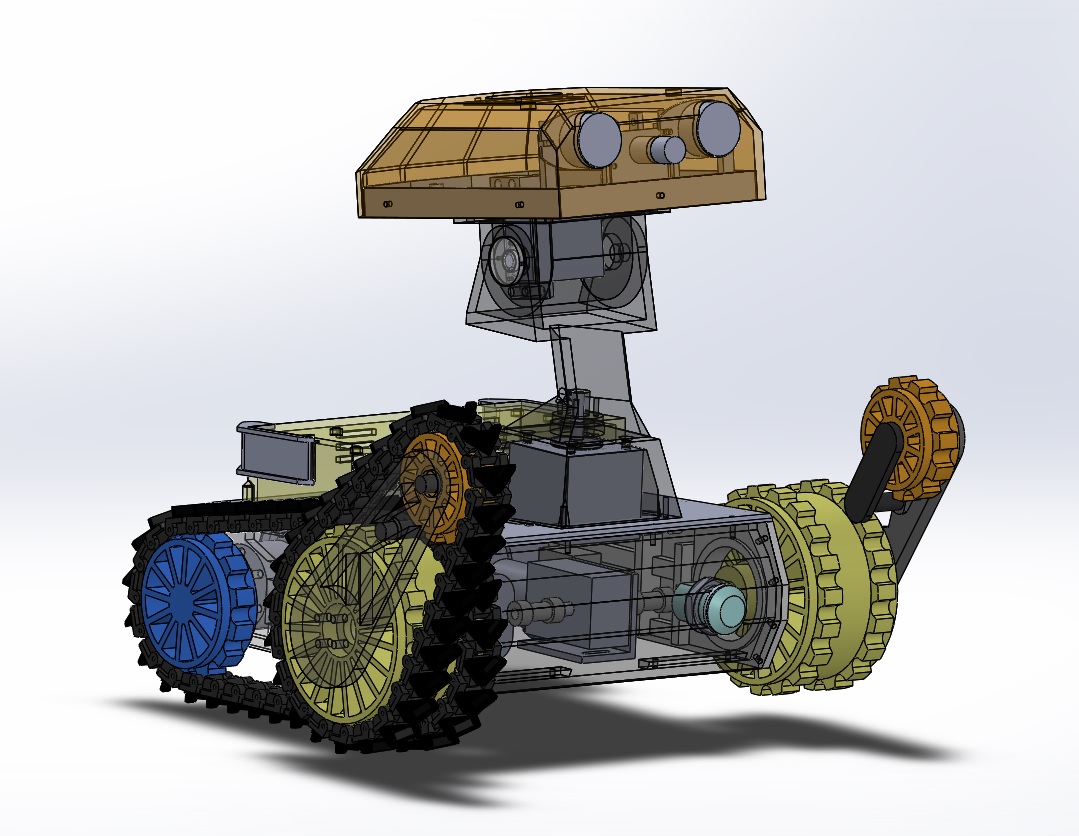
قبل بضع سنوات ، ما زلت قررت وأخصص ميزانية لهواية من خلال شراء طابعة ثلاثية الأبعاد. على الفور بدأ استنساخ الخشب الرقائقي من Ultimaker باليد ، وتم الانتهاء من الأبواب وصندوق الاكريليك لطباعة ABS ، وبدأت أفهم أنه مع الطابعة كان من الممكن بالفعل لتطوير شيء أكثر جدية ، المنقولة ومثيرة للاهتمام بالنسبة لي. تذكرت من بث الطفولة على شاشات التلفزيون مع معارك الروبوتات ، قررت ، لماذا لا تجعل نفسك شيء مثير للاهتمام. ذهبت إلى مهرجان الروبوتات ، أطلقت هذه الفكرة أكثر. بدأت أشاهد مشاريع روبوتية على أشياء متنوعة وأدركت أن كل هذا خطأ ، وأن تطورات الآخرين كانت في معظمها مملة وعادية ، وعدم وجود شفرة المصدر وما زالت "YAGENZHENER". أردت شيئا مع ميكانيكا غير عادية ، وليس مجرد قاعدة عجلات. كنت أرغب في تنفيذ ميكانيكي مشابه للروبوت عند تحميل Solidworks.
 نفس الروبوت الذي أصبح أحد الملهمين
نفس الروبوت الذي أصبح أحد الملهميننظرت إلى تصاميم مماثلة وفهمت مبدأ العمل وأخذت في الاعتبار فكرة القيام بشيء مماثل. كان الخطأ الرئيسي الأول هو أن كل شيء بسيط ، وسأقوم بالتدريج والتصميم والتحقق من التصميم النهائي ، وليس لدي فكرة كاملة عما وكيف سيتم ترتيبه ، وكيف سيتم إدارته ، وأي الوحدات سيتم استخدامها. كيف خاطئة جدا كنت. في البداية ، فهمت أن الروبوت سيصبح "نموًا" ، لقد خططت على هذا الروبوت لاستخدام جميع أنواع التعرف على الأشياء باستخدام OpenCV ، نوعًا ما من التنقل ، وقوف السيارات تلقائيًا للشحن ، فلن تدير ESP واحدًا هناك. في البداية ، تم وضع الفكرة لاستخدام ESP32 للعمل مع الميكانيكا و RaspberryPi3 للعمل مع المنطق ، الكاميرا ، الصوت ، إلخ. أحد الشروط الضرورية بالنسبة لي هو إعادة الشحن التلقائي ، لذلك اضطررت لمعرفة كيفية بيع القوة. نظرًا لعدم امتلاكي خبرة كبيرة في الهندسة الإلكترونية / الكهربائية ، حاولت في البداية استخدام شكل من أشكال Powerbank مع القدرة على العمل في وضع UPS. اعمل من البطارية (في حالتي ، 8 عناصر من 18650) عندما لا تكون هناك قوة خارجية وإعادة شحن نفس العناصر وتعمل من التيار الكهربائي عند توقف الروبوت للشحن. بشكل عام ، كانت هناك العديد من المحاولات لتجميع كل شيء وجعله يعمل ، لكنني أدركت أنني بحاجة لتعلم العتاد أو طلب المساعدة. نظرًا للتغيرات المستمرة في جميع الوحدات واللوحات ، لم يعد كل شيء ملائمًا لجسم الروبوت وفي وقت ما أدركت أن الوقت قد حان لإعادة كل شيء.
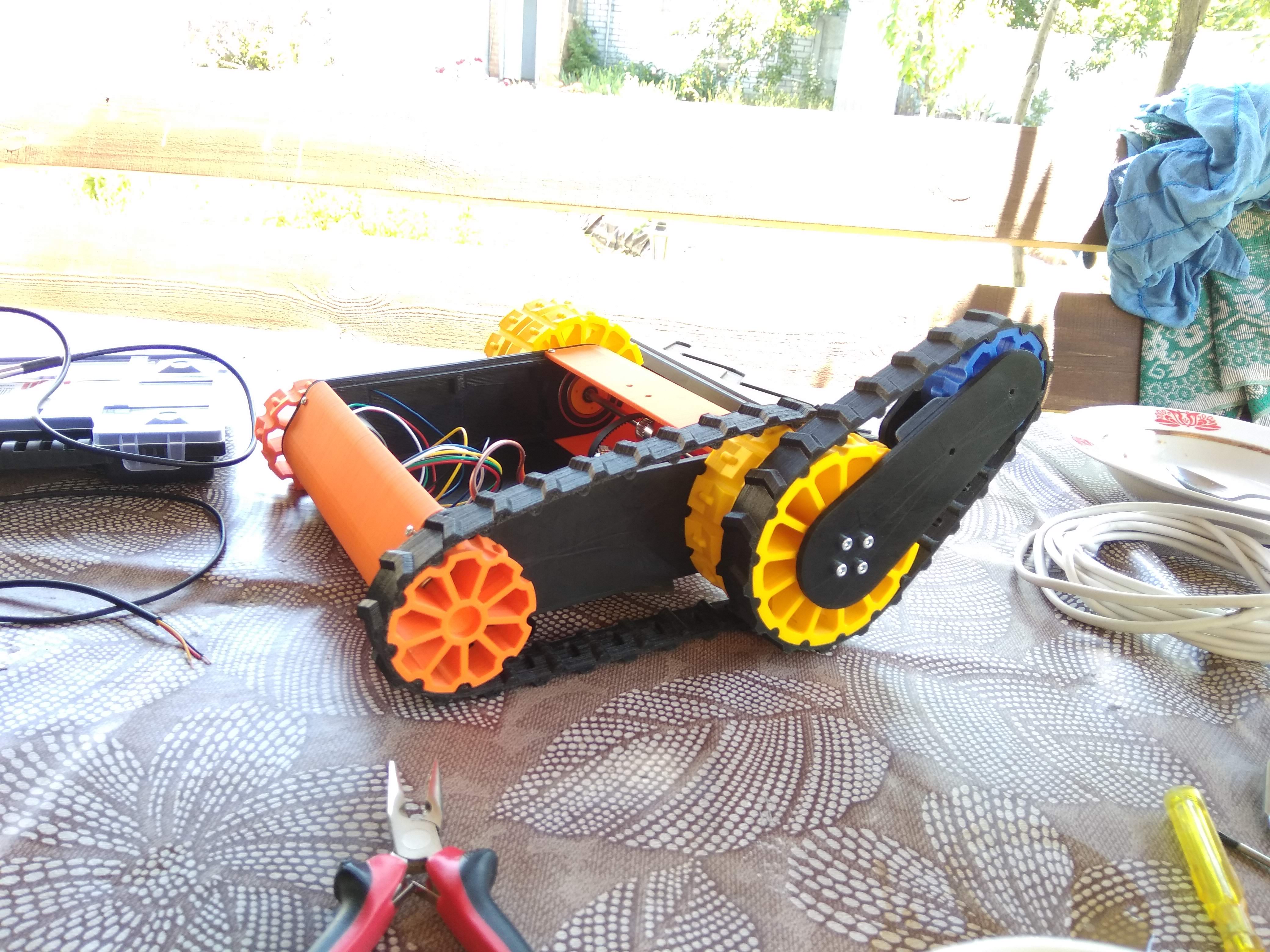 الإصدار الأول من التصميم مع المسارات المطبوعة مع حزام واحد ومؤازرة لقلب الجزء الأمامي من المسارات
الإصدار الأول من التصميم مع المسارات المطبوعة مع حزام واحد ومؤازرة لقلب الجزء الأمامي من المساراتأول عمل على الخلل
بعد المشاركة في ندوة عبر الإنترنت حول الروبوتات ، قابلت شخصًا قام بتطوير لوحات الدوائر وقررت بنفسي أنه من الأسهل بالنسبة لي رسم نوع من المواصفات الفنية والحصول على نوع من الحلول من شخص يعرف تصميم اللوحة وتطوير الجهاز. في الوقت نفسه ، بدأت العمل في مبنى جديد حول النظر إلى نقاط عتبتي في المرة الأخيرة. وهنا مرة أخرى أخطو على نفس أشعل النار حتى النهاية دون أن أفهم كيف ستبدو جميع الأجهزة الإلكترونية وما هي أبعادها وكيف سأضعها كلها. لقد ناقشنا أن هذا سيكون حلاً معياريًا ، وكان لدي بعض اللوحات ، على سبيل المثال ، محركات المحركات والبطاريات ، وبدأت في إعادة محاكاة المشروع ، لكنني بالفعل أرسم كل لوحة بالفعل بفتحات التثبيت ، ومآخذ الأسلاك ، والمبرد ، إلخ. حتى لا تصطدم مشكلة نقص المساحة مرة أخرى. في الواقع ، اقتصرت مساحة منطقة الطباعة على 200 * 200 * 200 ملم ، وحاولت جعل هذا الإصدار من العلبة من جزء واحد ، والذي استغرق حوالي 400 غرام من البلاستيك وعدة أيام للطباعة.
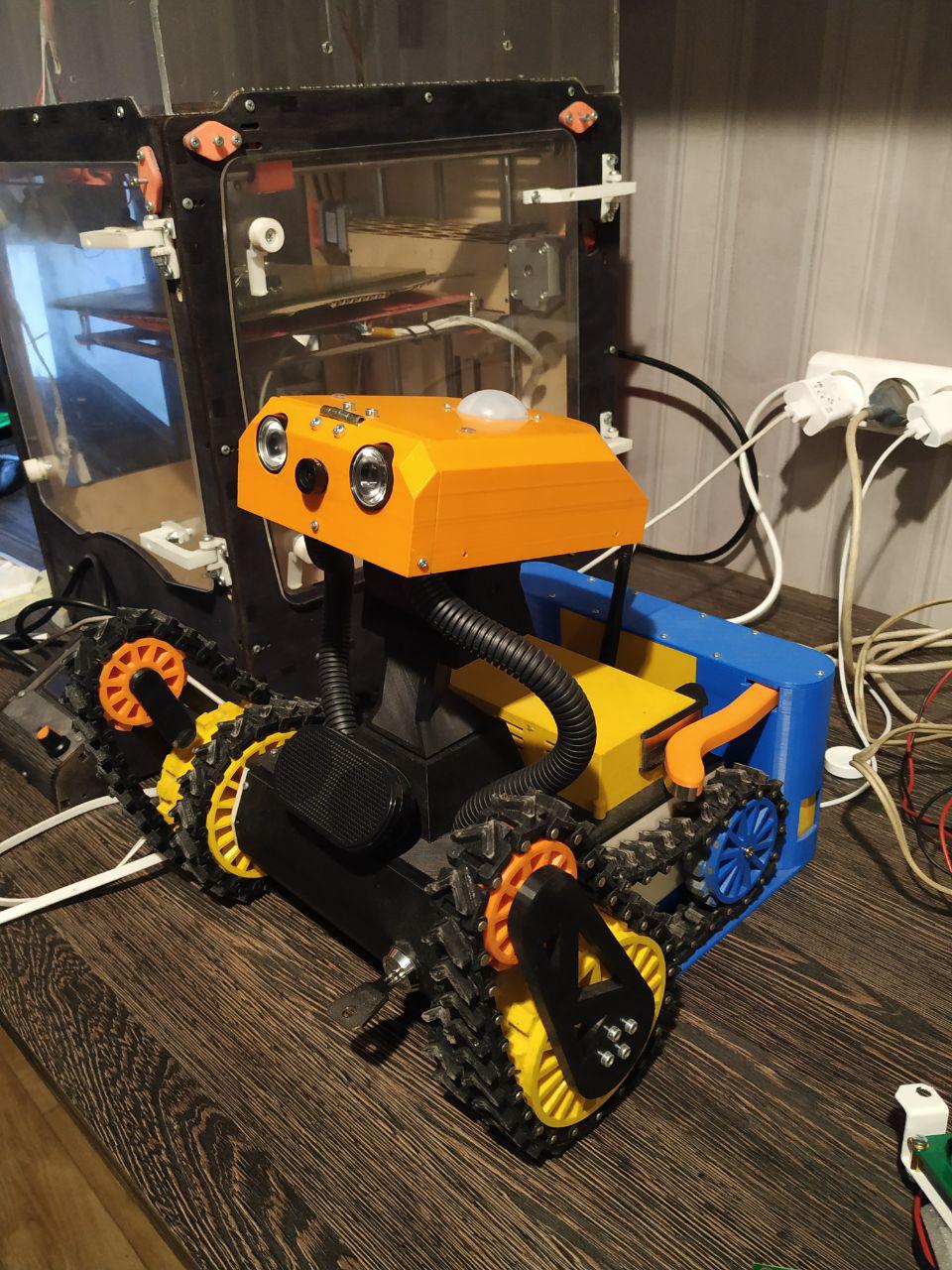
بعد عدة محاولات للتشققات التي ظهرت في اليوم الثاني ، المنفصلة عن الطاولة ، أدركت أن المبنى الجاهز ليس فكرة سيئة. سوف تستغرق عملية إعادة بعض الأجزاء وقتًا أقل بكثير وستكون مشكلة الطابعة أقل بكثير. بعد تلقي مجموعة من اللوحات المطلقة مع كل تمنياتي بمرور الوقت ، تعلمت العمل مع سجلات التحويل ، ومضاعفات الإرسال ، وبدأت بطريقة ما على الأقل في فهم الدوائر والأجهزة التي كانت غير مفهومة بالنسبة لي. بحلول ذلك الوقت ، كان لي مرة أخرى إعادة بنائها بالكامل. لقد غير مبدأ تناوب "الكفوف" الأمامية من مؤازرة إلى محرك تروس دودة ، وترك فكرة طباعة أحزمة لليرقات من الإيلاستين الشبيهة بالمطاط وتحويلها إلى مسارات بلاستيكية مسبقة الصنع مجمعة على المسامير وملصقة عليها بأشرطة مطاطية. في البداية ، تم التفكير في نظام التهوية ، والذي نقل الهواء من الخلف من وراء الروبوت ، من خلال نظام التهوية الذي يمر عبر جميع الألواح ، والأنابيب التي تم فيها ربط الأسلاك في "الرأس" ، وتهب الهواء الساخن للخروج منه. وقد عمل نظام التهوية هذا في وقت ما ، ولكن بعد ذلك أعيد بناء كل شيء مرة أخرى ، لذلك كان من الأسهل بالنسبة لي أن أطبع الغطاء مع مجموعة من الفتحات والتهوية السلبية.
ما هو في الوقت الراهن
في عطلة نهاية الأسبوع في دنيبر ، أقيم المهرجان الفني Interpipe TechFest ، حيث قررت أن أطلع الناس على ما لدي الآن ، وأنصت إلى آراء الآخرين والتحدث مع odnodumtsami. هناك سمعت مرة أخرى أنه سيكون من الممكن الكتابة في مكان ما ، على سبيل المثال ، على Habré والحصول على بعض ردود الفعل من الناس.
في الواقع ، بالنسبة لي هي عبارة عن منصة سوف أتعلم عليها العمل مع ROS ، وحاول التنقل في الفضاء ، وإعادة بناء العقوبة ، ومحاولة العمل مع غطاء الحالة الصلبة ، الذي أنتظره من كيك ستارتر ، أريد أن أشير إلى شيء مثل كاميرا ستيريو واقعية. أدرك أن أدمغة التوت لن تكون كافية لي على الأرجح ، ومع مرور الوقت سأتحول إلى شيء أكثر قوة.
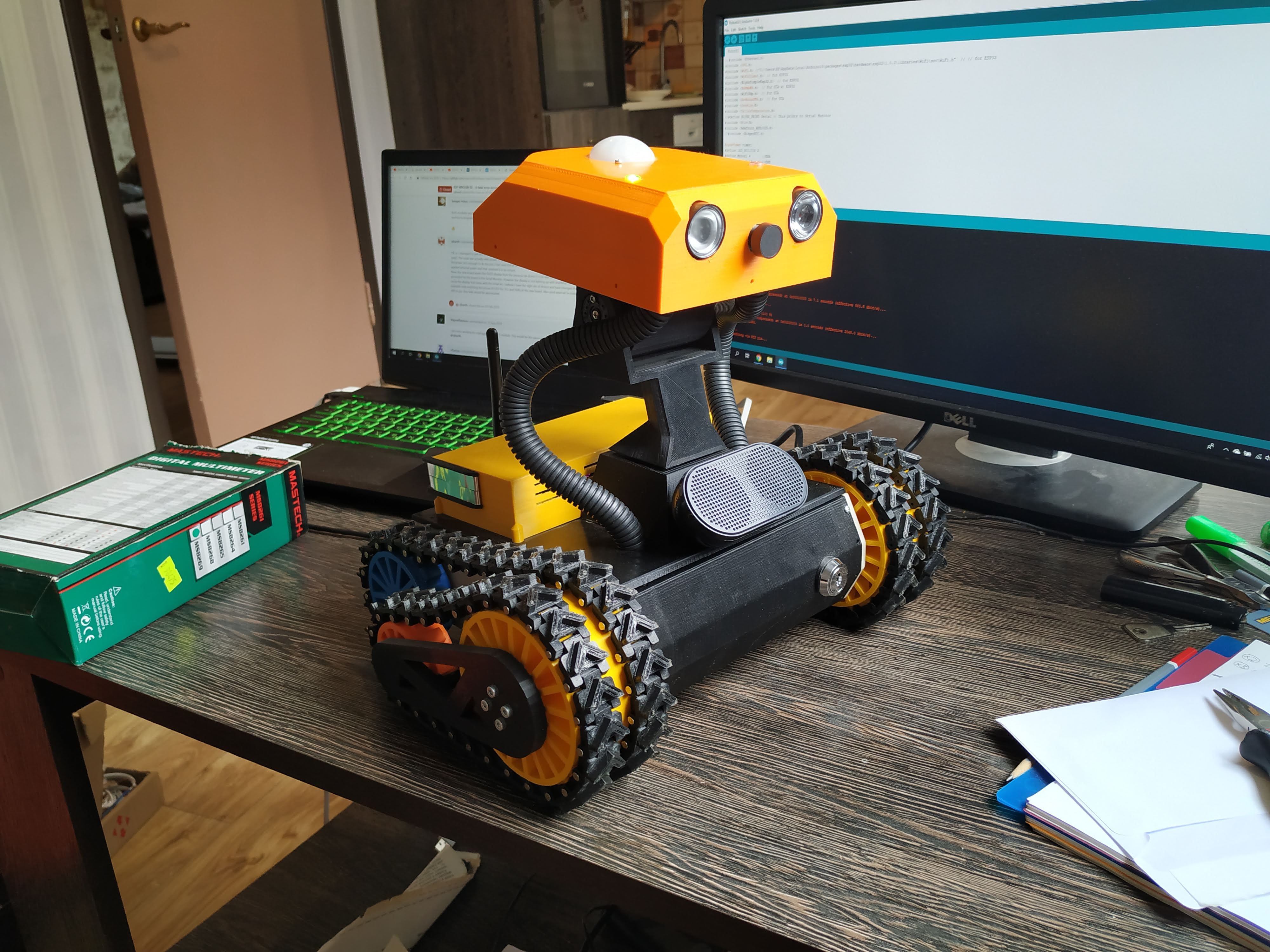
الآن يمكن استخدام هذا الروبوت باعتباره "حارس المنزل". بينما يتم ترتيب الإدارة من خلال تطبيق Blynk نفسه. وهي مجهزة بجهاز استشعار الحركة القبة ، وكاميرا مع القدرة على تشغيل / إيقاف تشغيل مرشح الأشعة تحت الحمراء ، إضاءة الأشعة تحت الحمراء. بعد تنشيط وضع الحماية من الهاتف ، تلقيت إشعارًا على الهاتف. يمكنني تشغيل برنامج RaspberryPi 3 ، وبدء البث ، وتدفق تسجيل الفيديو ، والتقاط الصور التي يتم إرسالها إلى بريدي. يمكنني الذهاب لمعرفة ما يحدث هناك في المنزل والعودة إلى محطة الشحن.
إن بطارية 4s2p المجمعة ذاتيا من الوحدات 18650 في 3200mAh تعطيني كل منها حوالي 8 ساعات من القيادة دون إعادة الشحن مع تشغيل جميع المعدات ونقل الفيديو وبدون أي توفير للطاقة. حتى الآن ، لم تصل اليدين هذا. باستخدام Google TextToSpeach ، والكتابة في محطة هذا التطبيق ، يقرأ الروبوت النص. وهذا كل شيء من أي مكان في العالم حيث لدي اتصال بالإنترنت.
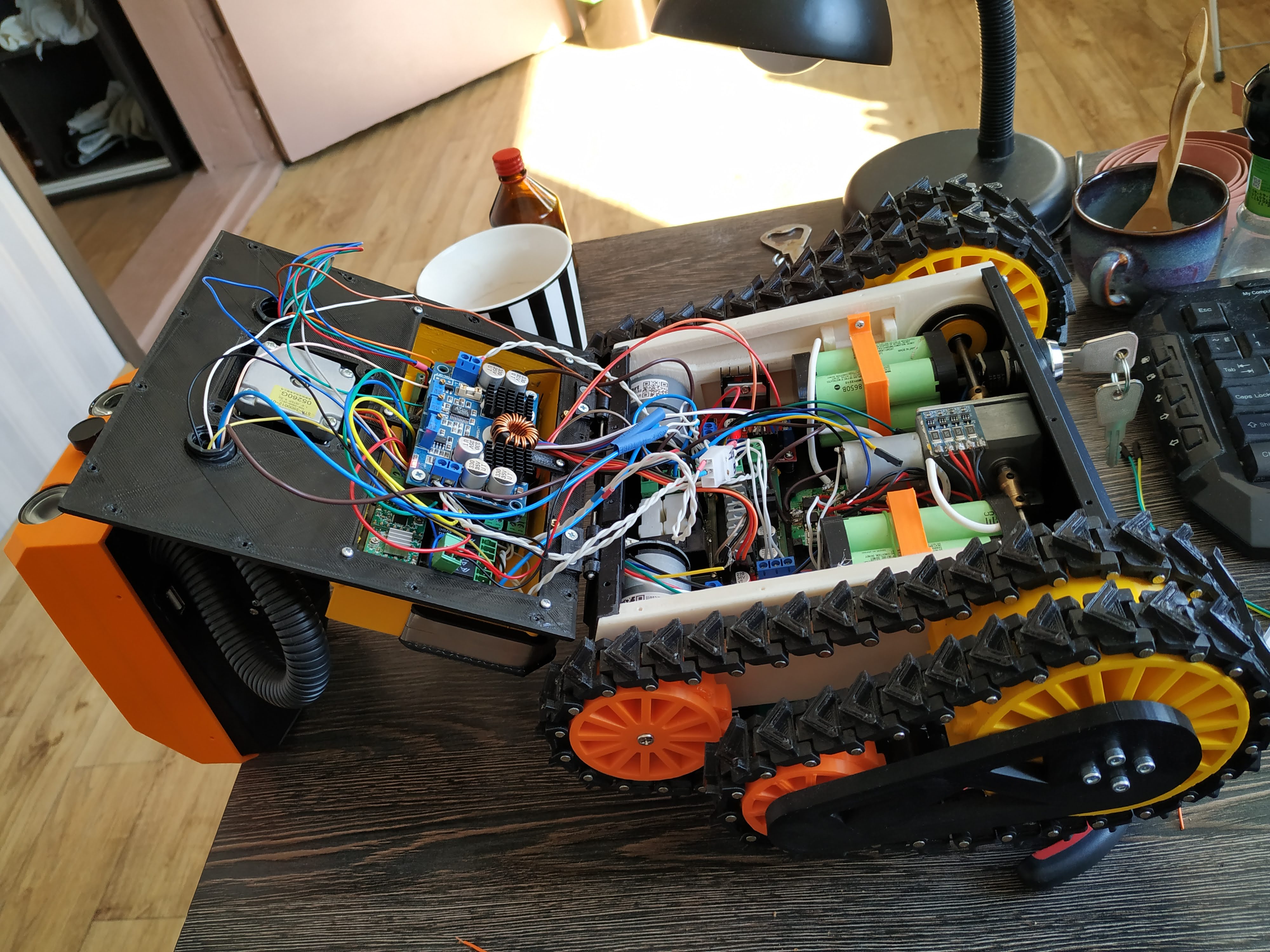 قليلا من القصدير في الداخل
قليلا من القصدير في الداخل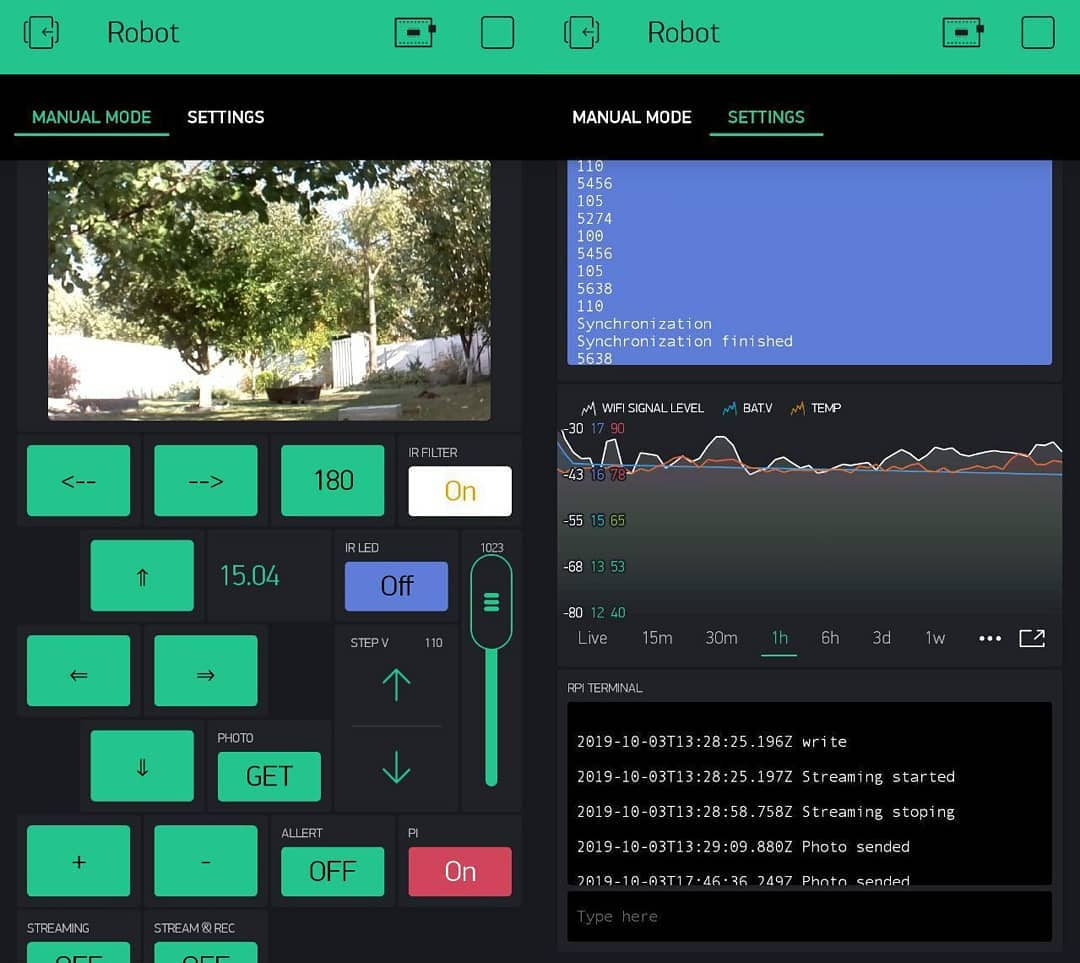 هذه هي الطريقة التي تتحكم بها واجهة المستخدم على الهاتف
هذه هي الطريقة التي تتحكم بها واجهة المستخدم على الهاتفما هو التالي ولماذا أنا أكتب كل هذا
بشكل عام ، كان الغرض من زيارة المعرض هو العثور على معارف جديدة مع odnodumtsami ، وعلى استعداد للبدء في القيام بشيء يتعلق بالروبوتات. لقد سئمت من العمل كمبرمج ، وكتابة تطبيقات سطح المكتب ، وهذا ليس رائعًا كما كان يبدو من قبل وأعتقد أن هذا الاتجاه ينحني تدريجياً. بدلاً من إعادة تعليمي لتطوير WEB ، قررت تغيير الاتجاه بشكل جذري وربط حياتي بالروبوتات و IOT ، والتي أحبها حقًا. بنفسي ، قررت أنه أثناء العمل في عمل لا علاقة له بهذا المجال ، لم يكن لدي ما يكفي من الوقت. يجب أن أختار بين ما أحتاج وما أحب وأريد ، لقد وفرت بعض المال ، وتركت العمل وبدأت في دراسة كل هذا.
لدي العديد من الأفكار حول موضوع الروبوتات ، أهمها يتعلق بالزراعة ، استنادًا إلى رؤية الكمبيوتر وخرائط العمق والتعرف على الأشياء ، إلخ. أفهم أن هناك الكثير من العمل والآن بدأت للتو في التعامل مع ROS. لديّ معرفة في الهندسة ، والقدرة على العمل مع أنظمة CAD / CAE ، ومن حيث المبدأ ، يمكنني فعل كل شيء بنفسي ، ولكن فهم مقدار العمل الذي يجب القيام به في مجال الميكانيكا ، والتنمية ، وسوء الحسابات ، ومعرفة كيفية العمل مع ROS والخرائط العميقة وأجهزة الاستشعار والتوجيه المكاني. وجعل كل شيء إلى الذهن سيكون صعبا للغاية. لذلك ، أنا أبحث عن عدة أشخاص. الذين هم على استعداد للانخراط بجدية في العمل على هذا بدء التشغيل ويصبح واحدا من المؤسسين المشاركين. بالطبع ، لا يمكنني أن أتعهد بأن كل شيء سيكون رائعًا ، وفي غضون نصف عام سوف تجلب لنا الشركة الناشئة الكثير من المال ، ولكن حتى يكتمل هذا المتخصصة ، يمكنك محاولة تنفيذ شيء ما على مستوى النموذج الأولي الأول والانتقال إلى المعجلات ، ومنصات التمويل الجماعي و بطريقة ما تعلن عن نفسك.
أنا مستعد أيضًا لدراسة المقترحات في هذا الاتجاه. أنا مستعد للعمل مع شخص ما عند بدء تشغيل شخص ما ، أو ليس بالضرورة بدء تشغيل ، ولكن ببساطة تطوير بعض الشركات ، ولكن في اتجاه مثير للاهتمام بالنسبة لي.
لذلك ، أود أن أسمع أي تعليقات على هذا الموضوع. ربما ، بعد كل شيء ، وهذا مصلحة شخص ما. أنا نفسي أعيش في مدينة دنيبر بأوكرانيا. وفقًا لذلك ، سيكون من الأصح العمل على مشروع واحد على مقربة نسبية ، على الرغم من أنه بمئات الكيلومترات بدلاً من الآلاف ، يتم النظر في جميع الخيارات.
إذا كانت هناك أي أسئلة حول جهاز روبوتي المحدد ، فأنا مستعد للإجابة والمناقشة. أيضا على صفحة الفيسبوك هناك العديد من أشرطة الفيديو من الروبوت وعقباته التغلب عليها
إذا كان أي شيء يمكنك أن تجد لي دائما هنا في
الفيسبوك أو الكتابة لي على marchenko.andrii@gmail.com