عند إنشاء مركبة ذكية بدون طيار StarLine ، لا تتمثل الخطوة المهمة في تطوير البرامج الأساسية (البرامج) التي تعمل عليها فحسب ، بل أيضًا إنشاء عناصر البنية الأساسية المصممة لتبسيط اختبار النظام المطوّر. أحد العناصر الرئيسية هو محاكاة افتراضية.
كلما تم تطوير خوارزمية جديدة أو تحديث واحدة موجودة ، تنشأ الحاجة إلى اختبارها الشامل قبل استخدامها على سيارة في ظروف الطريق الحقيقية. إذا تم تحديد سلوك البرنامج المطلوب مسبقًا ، فيمكن استخدام اختبارات البرامج الخاصة للاختبارات الأولية. ومع ذلك ، لديهم عدة عيوب كبيرة: أولاً ، إن إنشاء كل خوارزمية يتطلب تكاليف وقت كبيرة ؛ ثانياً ، لا يمكن استخدامها إذا لم يتم تنظيم سلوك النظام بشكل صارم.
لذلك ، من أجل التحقق الأولي من خوارزميات البحث والاختبار ، من المقبول عمومًا استخدام جهاز محاكاة يتم فيه إنشاء ازدواج افتراضي لسيارة بدون طيار ويتم محاكاة سلوكها في سيناريوهات الطرق المختلفة.
بالإضافة إلى ذلك ، يوفر استخدام جهاز المحاكاة عددًا من المزايا:
- يتم تقليل وقت اختبار البرامج المتقدمة - من الأسهل بكثير تشغيل جهاز محاكاة بدلاً من إعادة إنشاء نصوص مهمة في العالم الحقيقي ؛
- يصبح من الممكن اختبار حالات المواقف الأكثر ترجيحًا وصعوبة دون المخاطرة بالناس أو البنية التحتية ؛
- يصبح من الممكن إعادة إنتاج نفس حالة المرور مرارًا وتكرارًا في نفس الظروف.
يجب أن يكون مفهوما أن العيب الرئيسي للمحاكاة هو استحالة إنشاء عوالم افتراضية واقعية بالكامل. ونتيجة لذلك ، فإن استخدام جهاز المحاكاة لا يحل تمامًا محل الاختبارات على سيارة حقيقية ، ولكنه يقلل فقط من عددهم.
على مدار السنوات القليلة الماضية ، كان هناك العديد من أجهزة المحاكاة المفتوحة المصممة لاختبار برامج المركبات غير المأهولة:
Gazebo و
V-Rep و
Webots و
LGSVL Simulator و
MicrosoftAirSim و
CARLASimulator و
Deepdrive وغيرها الكثير.
فلماذا ، مع مجموعة متنوعة من أجهزة المحاكاة الحالية ، هل اخترنا Gazebo؟ يتم شرح كل شيء بكل بساطة: لقد احتجنا في أقصر وقت ممكن إلى جهاز محاكاة بسيط يتكامل بشكل جيد مع نظام ROS وجميع الأدوات اللازمة لإنشاء نسخة افتراضية من سيارتنا. لحل مشكلتنا ، كان من الضروري محاكاة تشغيل أجهزة استشعار مختلفة (الأغطية ، الكاميرات ، نظام الملاحة بالقصور الذاتي ، إلخ) ، التحكم وديناميكية السيارة ، إشارات المرور والمشاة. كل هذا كان موجودا في أكشاك في شكل الإضافات.

لإنشاء نسخة احتياطية افتراضية لسيارة غير مأهولة ، أخذنا طرازها ثلاثي الأبعاد وقمنا بتعيين المعلمات الحركية والديناميكية الأساسية لها - كتلة السيارة ، قابض العجلات ، دائرة نصف قطرها الدنيا التي تحول دون ذلك ، إلخ. ثم قمنا بتزويده بنسخ افتراضية من جميع أجهزة الاستشعار التي نستخدمها ونضع معايير مماثلة لخصائص النماذج الأولية الحقيقية.
لإنشاء مناطق تدريب افتراضية في Gazebo ، نستخدم خرائط التضاريس المبنية في العالم الحقيقي - يتم وضع جميع الكائنات في نفس المواضع كما في الواقع. في نفس الوقت ، ننتقل إلى المحاكاة: شبكة الطرق ، إشارات المرور ، معابر السكك الحديدية ، إشارات المرور والمشاركون الرئيسيون في حركة المرور على الطرق - المشاة والسيارات.
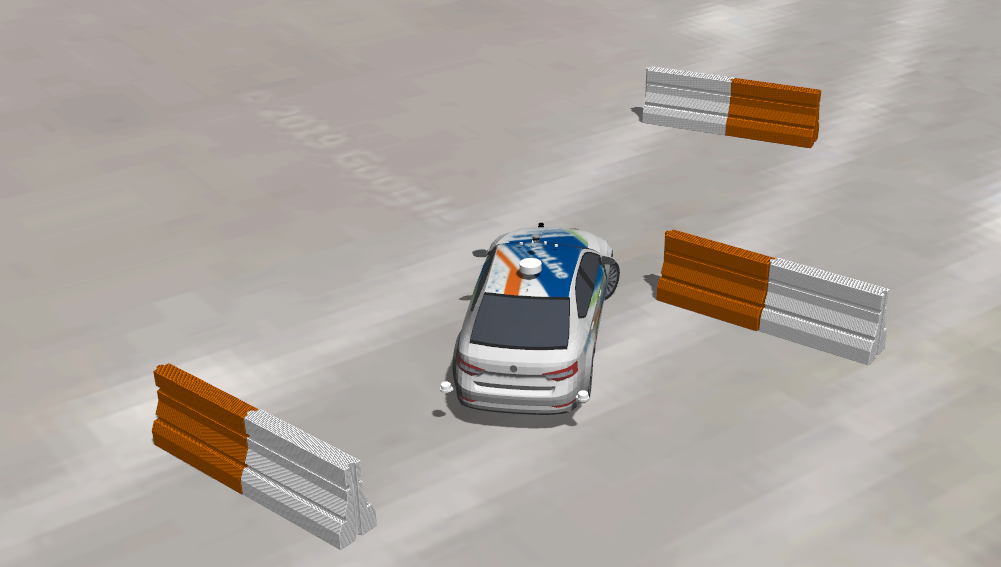
على سبيل المثال ، هذا هو نموذج الاحتكار التلقائي الذي نستخدمه للتحضير لتأهيل المنافسة التكنولوجية
"Winter City" :
أثناء الإعداد ، تخطت المضاعفة الافتراضية للمركبة غير المأهولة مرارًا وتكرارًا الطرق المختلفة على أرض تدريب افتراضية.
إذا نظرت إلى المضلع الذي تم إنشاؤه ، فقد تثار عدة أسئلة: لماذا هذه الواقعية المنخفضة؟ أين المنازل ، تساقط الثلوج ، الأشجار ، إلخ؟ في هذه الحالة ، تكون مثل هذه التفاصيل زائدة وغائبة ، لأن المحاكي يجب أن يعكس فقط تلك الجوانب من العالم الحقيقي الأكثر أهمية لنظام البرمجيات الحالي. تتطلب إضافة جوانب زائدة عن الحاجة وقتًا أطول بكثير من التوفير من استخدام المحاكاة. من المهم أن تتذكر أنه يتم إجراء الإعداد النهائي والاختبارات على سيارة حقيقية.

باستخدام جهاز محاكاة Gazebo أعطانا عددًا من المزايا أثناء عملية التطوير. ومع ذلك ، فقد أبرزنا عددًا من أوجه القصور التي أصبحت أكثر أهمية في عملية تطوير سيارة StarLine غير المأهولة. عيوب كبيرة من أكشاك تشمل:
- أخطاء في تشغيل الأشعة الرأسية للالأشعة ثلاثية الأبعاد عند حسابها على بطاقة فيديو ؛
- الافتقار إلى الأدوات اللازمة للإنشاء التلقائي للبنية التحتية الحضرية وسيناريوهات الطرق ؛
- الواقعية المنخفضة محاكاة ديناميات السيارة.
- انخفاض الواقعية.
- نقص الظروف الجوية المحاكاة.
في هذا الصدد ، نخطط لتغيير المحاكاة المستخدمة ، إذا بقيت Gazebo بحلول نهاية العام على نفس مستوى البرنامج.

في المستقبل أيضًا ، نخطط لإنشاء اختبار تلقائي ومستمر بالكامل لجميع برامج StarLine للسيارات الذكية في محاكاة تم نشرها على خادم بعيد. سيتيح لك ذلك تجميع الكيلومترات الافتراضية لكل إصدار من البرنامج والتأكد من أن كل خوارزمية تم تطويرها قد تم اختبارها جيدًا قبل تنفيذها في مركبة غير مأهولة حقيقية.
إينستاجرام