كان يعيش في سعادة دائمة ... ثم كسر.فاتحة
لمدة عام ، يبدو أنه في عام 2009 ، تم شراء محلل للمياه لمشروع واحد. نظرًا لحقيقة أنه كان من المفترض أن يتم استخدامه لضمان تشغيل المعدات التكنولوجية ، فقد تم شراء الجهاز بالكامل باستخدام أداة أخذ العينات التلقائية.

هذا هو في الأساس مناور CNC بأربع درجات من حرية الحركة لتغذية العينات تلقائيًا للمحلل.
لقد عمل لمدة 10 سنوات تقريباً وقدم أكثر من ثلاثين ألف عينة مع بعض المشكلات البسيطة ، والتي تم التغلب عليها "بدم صغير".
في بداية هذا العام كان متعبًا - فشل المحور Z في الحركة الرأسية.
هذا هو ، ببساطة توقف المتلاعب عن "رؤيته". في ضوء عدد من ظروف الصيانة الرسمية ، لم يحل مجمع القياس أي مشكلات بسيطة (إصلاح PSU ، وميض بعد فشل FLASH) تم حلها بشكل مستقل. كان عليّ هنا بالفعل البحث عن المسؤولين الذين اتضح منهم ... بعض الميزات:
- اتضح أن المتلاعب ليس قديمًا فحسب ، ولكنه قديم بشكل كارثي
- كان يبلغ من العمر وتوقف عند الشراء
- لا وثائق لذلك
- يجب تغيير جميع الالكترونيات
- أجزاء متوفرة ولكن التكلفة أكثر من الجديد
- ليس هناك ضمان مائة في المئة أنه مع بديل ستعمل
بعض الميزات التي كانت معروفة لي:
- لا تعمل البرامج الثابتة للشركة المصنعة مع المحلل (من الجيد إجراء نسخة احتياطية) ،
- يبدو أن محمل الإقلاع قد تغير أيضًا ، نظرًا لأن البرامج الثابتة للمصنع "كما هي" غير مقبولة
- لا توجد وسيلة "لإعادة تحميل" محمل الإقلاع ، لذا فإن شراء الإلكترونيات بمبلغ 6 آلاف دولار لا طائل منه
- الميكانيكا في حالة ممتازة ، حيث أني خدمتها بشكل دوري
- أجهزة الاستشعار صفر (قاعة) على قيد الحياة
وهكذا ، تحول خياران:
- شراء محلل جديد من الشركة المصنعة بمبلغ 17 ألف دولار ووقت تسليم غير مفهوم
- إعادة صنع جميع برامج الإلكترونيات والكتابة
الجزء الأول ، الأجهزة
بادئ ذي بدء ، قررت التأكد من أن الميكانيكا تعمل بجهد 12 فولت (ضد 37 في الأصل). قررت خفض بسبب حقيقة أن نصف التحكم في السلطة من محركات التحكم في العتاد تحسنت لائق. لذلك ، تم سحب السائقين A4988 ، لوحة CNC ، و Arduino NANO من منصة الانتظار. تم إرساء كل هذا ، وامض من قبل مشروع grbl الشهير واستجوبت مع التحيز. تم الحصول على الحد الأقصى لتكرار الخطوات لكل محرك ، معاملات تقسيم الخطوة ، وتم ضبط تيارات السائق.
اتضح أن XY لا تسخن على الإطلاق ، وأنها تعطي سرعة مناسبة للغاية. كان من الضروري ثني التيار لمحرك الأقراص Z إلى أقصى حد ، نظرًا للقسمة على 8 والاستهلاك اللائق عند بدء التحرك لأعلى ، نظرًا لأنه يسحب كتلة ثقيلة من محركين ومحركين ، بينما ارتفعت درجة حرارة شريحة السائق حتى 50 درجة حتى مع وجود المبرد. اضطررت إلى إضافة برودة إلى منفاخ أمام هذا محرك الأقراص في التصميم النهائي.
في النهاية ، بدلاً من ذلك

اتضح
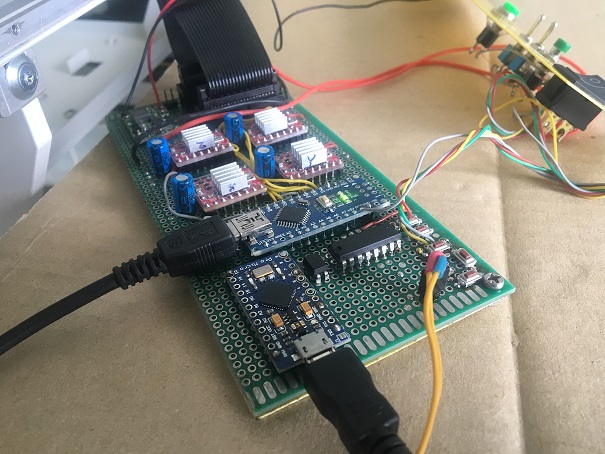
سيكون Arduino Pro Micro أغنية منفصلة. في الخلفية ، توجد لوحة بها مفاتيح تبديل لتحديد وضع التشغيل ، وأزرار البدء وإعادة الضبط.
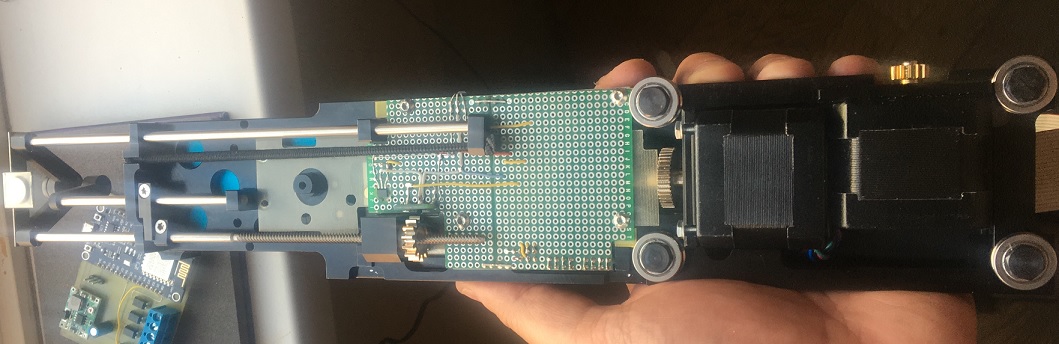
الآن عن أمعاء. كما قلت ، نجا جميع أجهزة الاستشعار قاعة. من هذه ، XYs هي مثيرة للاهتمام فقط لمنطق التشغيل المختلفة. إذا كان المستشعر في Y يفتح "موافق" عند الاقتراب من المغناطيس ، فعندئذ يكون المغنطيس في العاشر عكس المستشعر بشكل مستمر ، وفي Zero-X وبعد ذلك يوجد مصراع ناعم مغناطيسيًا يحمي المستشعر من المغناطيس ، بينما يغلق موافق. في ضوء هذا التجانس ، هناك حاجة لفهم أين تذهب عند البحث عن الأصفار. للقيام بذلك ، يوفر التصميم الأصلي موقف سيارات في نهاية العمل. ومع ذلك ، لم يتم تطبيقه على الإطلاق: عندما تم إيقاف الطاقة ، كان علي أن أضع رأسي على المحور Z بيدي وأرسله يدويًا إلى موقف السيارات.
حول Z هي القصة الرئيسية. هناك ، في الحالة Z ، لا يزال محرك المكبس المحاقن يعيش ، بدون مستشعر صفري ، ولكن مع مستشعر دوران مزدوج - أي مشفر تقريبًا. وهناك أيضًا مستشعر للضغط على القارورة عن طريق الانهيار ، يتم تنفيذه بواسطة جهاز حلزوني وأيضًا مستشعر Hall. كل من مجسات الدوران هذه عبارة عن تروس نحاسية تمر بأسنان خلف مستشعرات هول مع مغنطة.
لماذا أحتاج إلى تشفير مغناطيسي (كجزء من مهمتي الخاصة) لم أفهم ، وبالتالي استبدلت به بمستشعر صفري لمحرك الغطاس ، نظرًا لوجود Halls في المنضدة ، وكذلك مغنطيس نيوديميوم صغير من محرك عدسة DVD.
بدلا من هذا

أصبح
تكمن المشكلة الرئيسية في نحت الحديد في الإلحاح ، حسناً ، أنت تفهم نفسك. لا أريد حقًا الاحتفاظ بشيء في صندوق منفصل ، ونتيجة لذلك ، كل شيء مناسب في الأماكن المخصصة لذلك ، لكن الآن سأفعل ذلك بطريقة مختلفة قليلاً.
الجزء الثاني ، البرمجياتوأظهرت الاختبارات على لوحة التصنيع باستخدام الحاسب الآلي سرعة لائقة. لكن! إذا حاولت أن تقدم SD على الفور تردد STEP المطابق لهذه السرعة ، فلن تحصل على شيء سوى الهدير في المكان. من أجل الوصول إلى سرعات جيدة للحركة ، يجب تسريع محرك السائر ، تمامًا كما لو كنت تعتز التروس وقضبان القيادة (جيدًا ، أو الكرات ، أو الأحزمة) ثم تبطئه بسلاسة. لأن رمز تافهة نمت قليلا.
نظرًا لأنه من غير المناسب تقريبًا الوصول إلى قسم "Robotics" بمقالة بدون رمز ، على سبيل المثال ، التحكم في محرك الأقراص Z (بسبب اللوم). عند إصدار تردد إلى STEP ، لا يتوفر لـ digitalWrite وقت ، يجب عليك سحب المنفذ مباشرة. ربما تم تأجيلها وتأخيرها ، لكن الرمز جاء من عنصر تحكم XY ، وهناك حاجة إلى التزامن هناك.
في مجموعة مستويات الوظائف:
- منخفض - ذهابًا وإيابًا ، ابحث عن شيء لا أعرفه
- متوسط - معايرة إلى الأصفار ، ورسم حقنة ، وجعل عينة من العينة
- رسم تخطيطي لدورة عالية لتجاوز العدد التاسع من القنينات على منصة نقالة
يبدأ البرنامج عن طريق تهيئة المنافذ ، وقراءة التكوين المحدد من المفاتيح الموجودة على اللوحة الخلفية ، وبعد الضغط على START ، وضع مخطط التسلسل حتى يتم العثور على موضع على منصة نقالة لا توجد فيه قارورة مع العينة.
مخطط التسلسل الرئيسي يشبه هذا:
inline void frame_1(){ for (unsigned int i=0; i<6; i++){
بقيت Atavisms في شكل إخراج معلومات التصحيح إلى Serial في التعليمات البرمجية - اليسار للتحسينات المستقبلية. لقد نضجت إحداهما تقريبًا ، وحصلت على محاقن تحليلية لأربعة أضعاف الحجم ، وسيكون عليك إضافة خيار آخر في البداية.
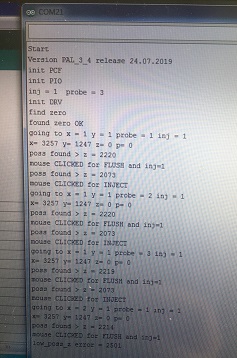
كانت المشكلة الرئيسية في تجميع البرنامج هي أنه في الأصل ، يعطي المحلل الأوتوماتيكب أين تذهب وماذا تفعل. كل هذا يحدث عبر منفذ COM والبروتوكول ، وهو ما لا يوجد مكان نأخذه. لأنني اضطررت إلى الخروج.
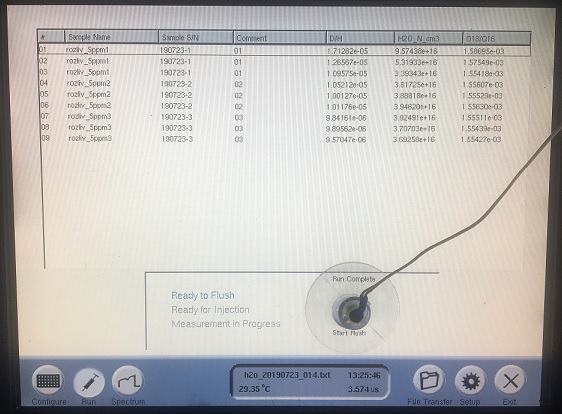
المحلل لديه الوضع اليدوي لأولئك الذين لم يشتروا المضخة التلقائية
السنجاب . في الوقت نفسه ، يظهر زر غامق "جاهز للعينة" على شاشة محلل ، وعندما يتعرض المشغل للطعن ، يجب عليه وضعه بالماوس (متعقب على لوحة المحلل). عند اكتمال القياس ، يظهر زر غامق "بدء التدفق" ، وإذا كان لدى المشغل عينة أخرى ، فإنه يضغط عليها بالماوس لإعداد المحلل للقياس التالي. بعد النقر بالماوس ، يختفي الزر ويبقى حقل أبيض (مشرق). قررت التقاط هذا الاختلاف في السطوع مع جهاز استشعار ضوئي. أتحقق من ظهور الزر المظلم باستخدام مقاوم للضوء مثبت في كأس الشفط. لم أجد كوب شفط أسود وعندما تغيب الشمس عن النافذة ، يجب أن أغطي مستشعر الزر بشيء.
ولكن عليك النقر فوق شيء ما؟ لحسن الحظ ، كان للمحلل منفذ USB وما يكفي من زجاجات RedHat غير المختصرة منذ بداية عام 2000 لتوصيل هذا المنفذ تلقائيًا. إن Arduino Pro Micro يقف لمحاكاة الماوس على اللوحة الرئيسية الجديدة لجهاز أخذ العينات التلقائي. يتلقى رمز PIN من NANO في الوقت الذي يحتاج فيه المحلل إلى النقر. لقد كان كسولًا جدًا في كتابة الحركة ، لأنه قبل بدء العمل ، يجب ضبط الماوس على الزر مقدمًا.
يا السعادة ، التي أثقلتها التجربة ، أطلقت العنان للجزء من الماوس من الجلفنة الإدارية الأخرى ذات القيمة المضافة الرخيصة. نظرًا لأن نهاية اليوم الثاني من تصحيح الأخطاء عينيًا ، عندما كان كل شيء يعمل بالفعل وأعدت الصافرة لتوصيل أصوات مشابهة للأصوات الأصلية ، أصدر أحد السائقين دخانًا سحريًا وربط قسم الطاقة 12v بالقسم المنطقي 5v. حسنًا ، لا شيء ، نصف يوم من استبداله بآخر مستخرج من طاولة سرير بلا قاع ليس إصلاح 100 ألف دولار للمحلل. صحيح ، اتضح فيما بعد أن وحدة REXANT الجديدة للإمداد بالطاقة المشتراة بدلاً من منزل منسي في مرحلة ما بدأت تنتج ما يقرب من 50 بدلاً من 12 فولت ، مما تسبب في تأخير مؤسف.
الجزء الثالث ، اختبار المعايرة والموثوقيةبعد التجميع والتصحيح الأولي ، نشأت مشكلة عد الموضع بالموقع الحقيقي للقارورة. كان علي عمل لوحة مفاتيح وكتابة واجهة بسيطة لها في السلسلة. لم يتبق منافذ ، ولكن بالنسبة لأشد الحالات تم تخزين المسامير المسؤولة عن i2c. سيتم تعليقها على موسع PCF8574 الشعبي بأزرار متناهية الصغر يمكن سحبها حتى علامة الجمع ، والتي يمكن استخدامها لتحريك XY ، وحدد خطوة مضاعفة لتسريع العملية وتغيير XY إلى ZP. بعد كل نقرة في سلسلة يعرض موقف جديد. وبفضل هذه التقنية البسيطة ، كان من الممكن الحصول على جميع الإحداثيات والزيادات الحالية بسرعة وبدقة. خارج إجراء المعايرة ، يتم توصيل مفاتيح اختيار الوضع والزر الخاص بتشغيل cyclogram بمدخلات الموسع. في الفيديو ، في المنتصف تقريبًا ، تكون الأزرار ومفاتيح التبديل مرئية.
المحاقن لتغذية عينة ليست رخيصة - 100 دولار لكل منهما. خطأ في تحديد المواقع يكلف إبرة منحنية وحقنة ثمل لا رجعة فيه. لذلك ، تم إدخال محقنة مكسورة بإبرة خياطة ملصقة وكان الجهاز لمدة نصف يوم تقريبًا يدرس في أربع نقاط على ورقة من أجل تحديد حالات الفشل المزعومة في تحديد المواقع. لكنهم لم يكونوا هناك ، فوجئت. ومع ذلك ، نظرًا لوجود وقت كاف بين طعن العينة وتوظيف واحدة جديدة ، فقد استخدمتها للبحث عن الأصفار ، في حالة وجودها. في الفيديو ، يتم مشاهدة هذه اللحظة أقرب إلى نهاية الفيديو.
خاتمة
بشكل عام ، كان أكثر نجاحًا على الأرجح. مر أسبوعان من فهم اليأس إلى الانتقال إلى الإنتاج. تعمل منذ نهاية مايو ، وتنتج ما يصل إلى 200 قياسات في اليوم الواحد. لا يشكو الزميل المسؤول عن أخذ العينات والقياس.
الكرز لكعكة كانت ميزات جديدة لم تكن في الأصل. القدرة على التحرك على XY في نفس الوقت. القدرة على مضاعفة دبوس العينة ، مما زاد من حساسية محلل بتركيزات منخفضة للغاية من المادة المقاسة في العينة. وقوف السيارات التلقائي بعد القياس.
PostScriptum
بناء على طلب المهتمين ، شريط فيديو.