تطور الروبوتات يسير إلى الأمام: في اليوم الآخر ، نشرت الروبوتات اليابانية نتائج تطوير جهاز جديد. هذا هو الروبوت الذي يمكن أن يصعد الدرج العمودي ، والتعرف على الدرابزين والعناصر الأخرى ، ويمكن أيضا تسلق بعض
السطوح الرأسية الأخرى .
الروبوتات الأربعة المسلحة هي اتجاه شعبية جدا الآن. بدأ تطوير واحد من هذه الأجهزة في Boston Dynamics. أربعة المتلاعبين تعطي الروبوت القدرة على الحفاظ على التوازن وعبور المناطق المعقدة إلى حد ما مع التضاريس غير المستوية. ليس فقط الأجهزة التي يتم تطويرها ، ولكن أيضًا برامج لأجهزة الروبوت.

ومع ذلك ، فإن القليل من ممثلي عالم الروبوتات يمكنهم مواجهة العقبات الكبيرة. بادئ ذي بدء ، هذه أنظمة روبوتية من Boston Dynamics و Honda. مشكلة الروبوتات هي صعوبة الحفاظ على التوازن: مع الحركة الرأسية ، ينحرف مركز ثقل الآلية للخلف ، ومن الصعب جدًا على الروبوت البقاء.
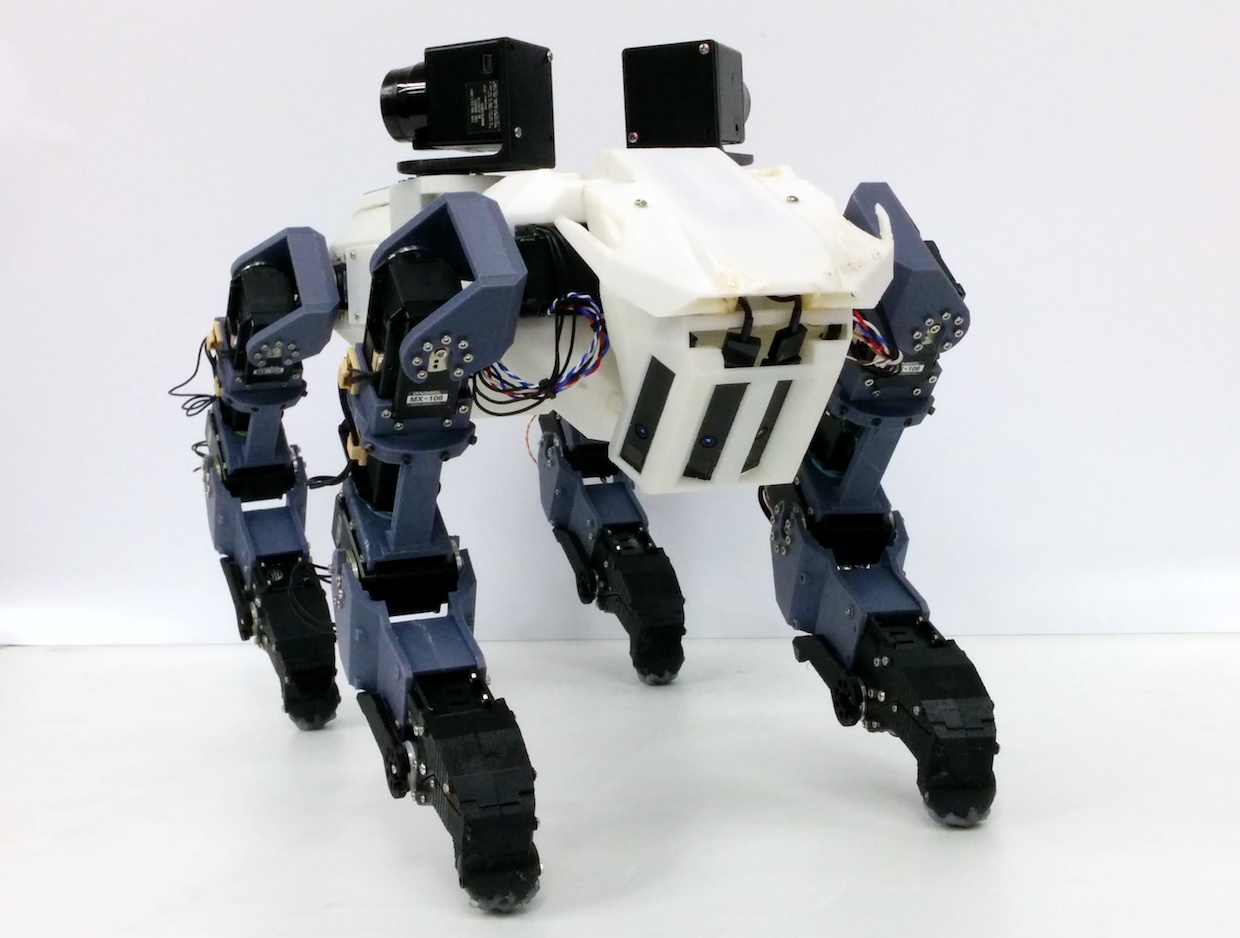
قام اليابانيون بحل المشكلة ببساطة نسبية - لقد زودوا ذريتهم بقبضات بسيطة لا تمنع على الإطلاق الجهاز من السير على سطح مستو ، ولكنها تساعد على الاستمرار أثناء محاولة تسلق السلم العمودي. كل من التلاعب "الساقين" لديه خمس درجات من الحرية. تم تجهيز المتلاعبين بأجهزة استشعار للضغط والقوة واللمس. هناك المزالج الخاصة التي تجعل من الممكن إصلاح مناور على الدرج أثناء الحركة.
تساعد أدوات تحديد نطاق الليزر الموجودة في الخلف ، وكذلك أربع كاميرات على الرأس ، الروبوت على التنقل في الفضاء. أجهزة الاستشعار تجعل من الممكن تحديد المسافة إلى كائنات مختلفة. تدخل المعلومات من جميع أجهزة الاستشعار إلى وحدة التحكم ، حيث تتم معالجتها. بالإضافة إلى ذلك ، توفر الخوارزميات الخاصة التعرف على الدرابزين ودرجات الدرج ، مما يوضح الروبوت الذي يمكنك عنده الحصول على الدعم.

عيب هذا الحل هو أنه يجب تدريب الروبوت على كل سلم فردي. ومع ذلك ، نأمل الروبوتات اليابانية في المستقبل القريب لتحسين تنميتها. يتحرك الروبوت ببطء نسبيًا (الفيديو أعلاه أسرع مرتين) ، لذا يجب معالجة هذه المشكلة.
إذا نجح كل شيء ، سيكون هناك روبوتات جديدة يمكنها التحرك على أي نوع من السطح تقريبًا. يمكنك استخدامها لأغراض مختلفة - الاستطلاع على الأرض ، البحث عن الأشخاص المتضررين من الزلازل أو الكوارث الأخرى ، دراسة المنشآت الصناعية ، إلخ.