في إطار منتدى Skolkovo Robotics & AI ، في 16 أبريل 2019 ، استضافت موسكو الاجتماع الأول في روسيا حول نظام التشغيل Robot ، وهو إطار برمجي عالمي شهير يقوم بتنفيذ الخوارزميات الأساسية لبناء روبوتات معقدة. أعطى هذا الحدث زخما قويا لتطوير جميع الفرق. لقد غرقنا في ما نحب أكثره - التطوير! لذلك ، الآن فقط وجدنا وقتًا لدمج المواد الفريدة في اجتماعنا ، والتي يتم إرسالها بواسطة المتحدثين للنشر.
من بين أكبر زوار منتدى الروبوتات في روسيا ، كان هناك أكثر من 150 مهندسًا يستخدمون بالفعل ROS أو يخططون فقط لاستخدامه في مشاريعهم. هذه نتيجة جيدة للاجتماع الأول لمجتمع صغير من مطوري روس الروس. نحن نسعى جاهدين لنصبح جزءًا من الحركة العالمية - ويجمع مئات المشاركين بالفعل فعاليات مماثلة في الخارج.
سيعقد الاجتماع الثاني الروسي روس في 30 نوفمبر 2019 .
شكرا مرة أخرى لكل من جاء وقضى وقتهم في دراسة مفصلة للتقارير والأسئلة الصعبة. أظهر كل هذا أن هناك اهتمامًا كبيرًا من جانب المجتمع بتطوير ROS ، وهناك حاجة إلى عمل منتظم لمواصلة عقد مثل هذه الاجتماعات. نحن ننمو عندما نشارك أفضل الممارسات ونحسن واحدة من أكثر أدوات تطوير الروبوت شيوعًا في العالم - نظام التشغيل Robot.
وكان المتحدثون لدينا المطورين الممارسة مع الموضوعات من تجربتهم الحقيقية. لذلك ، تعكس المواد المقدمة في هذا المنشور إمكانيات استخدام ROS في المشاريع الحالية والمستمرة.
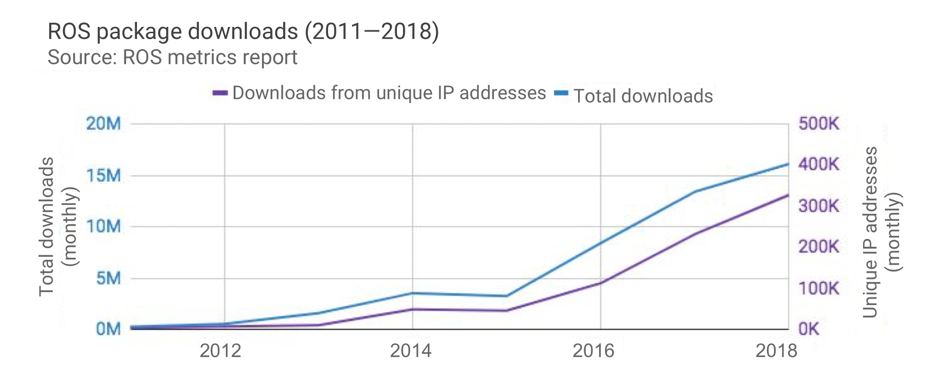
يعد مجتمع ROS العالمي حاليًا أكبر مجتمع روبوتي وأكثره انفتاحًا في العالم. زاد عدد تنزيلات ROS تقريبًا 6 مرات منذ عام 2014! من الواضح أن هذه هي الأداة الأكثر أهمية بالنسبة لأولئك الذين يصنعون الروبوتات ، لذلك نحن في Sberbank Robotics Laboratory ندعم كل من يشارك قيم ROS معنا ويريد تبادل الخبرات.
إذا كنت تقوم بتطوير خوارزميات جديدة للروبوتات ، فإن كتابة حزمة لـ ROS يعد حلاً جيدًا لدمجها في الروبوتات الحالية والتظاهر للعالم.
إذا كنت بدأت رحلتك في مجال الروبوتات ، فسيساعدك تعلم ROS في إتقان التقنيات الحديثة والاندماج في المجتمع.
أول ROS Meetup كان مليئا بتقارير مثيرة للاهتمام. ولكن نظرًا لعدم تمكن الجميع من حضور الحدث في موسكو ، فنحن ننشر مقاطع فيديو وشرائح عروض تقديمية لك:
مقدمة إلى ROS. الأيديولوجية والوضع الحالي.أليكسي بيركوف ، مختبر سبيربنك للروبوتات.يتحدث التقرير عن ظهور ROS ومفاهيمه والأشخاص الذين قاموا بتطويره ، بالإضافة إلى الحالة الراهنة للإطار في المجتمع العالمي.
رابط لشرائح العرض التقديمي.
تجربة استخدام ROS في الروبوتات التنافسية باستخدام مثال Eurobot.أليكسي بوستنيكوف ، مختبر سبيربنك للروبوتات.يناقش التقرير نظام توطين الروبوت باستخدام علامات Aruco باستخدام ROS.
رابط لشرائح العرض التقديمي.
بالمناسبة ، يمكنك المشاركة في مسابقات Eurobot من خلال الانضمام إلى فريق SetUp المدعوم من Sberbank Robotics Laboratory - هذه طريقة رائعة لتعلم الروبوتات و ROS ، ووضع مهاراتك موضع التنفيذ. للمشاركة ، اكتب رسالة إلى robotics@sberbank.ru.SLAM والملاحة يدر الليزر.أليكسي بيركوف ، مختبر سبيربنك للروبوتات.غطت قصة كيف استخدمنا ROS للتنقل عبر روبوت سريع باستخدام SLAM ومخطط المسار الموضوعات التالية:
- بناء خريطة غرفة وتوطين الروبوت باستخدام خوارزمية Gmapping.
- توطين الروبوت على الخريطة بواسطة خوارزمية AMCL.
- روبوت الملاحة من خلال MoveBase و DWA.
رابط لشرائح العرض التقديمي.
يمكنك الحصول على تدريب داخلي في مختبر Sberbank Robotics Laboratory حول موضوعات courier و ROS ، لذلك ، اكتب خطابًا إلى robotics@sberbank.ru.مخطط مسار الروبوت مع مراعاة خريطة معينة والعقبات الديناميكية باستخدام مثال Eurobot.ألكساندر جامايونوف ، مختبر سبيربنك للروبوتات.تاريخ إنشاء مخطط المسار الخاص بك استنادًا إلى A * و T * و Costmap Server و Global Planner و STM32 Driver وخوارزمية Ramer-Douglas-Pecker للمشاركة في مسابقات Eurobot الدولية.
رابط لشرائح العرض التقديمي.
تجربة استخدام ROS في نظام التحكم في مركبة غير مأهولة تحت الماء "Cousteau 2"تيمور أختياموف ، UCM Hydronautics.محاكاة مركبة تحت الماء. استخدام آلات الدولة SMACH. ROS المجمع المسلسل. الزناد لرموز QR. Roslaunch API لبدء وإيقاف تشغيل الملفات من كود بيثون. العقد التلقائي عند بدء التشغيل OS.
رابط لشرائح العرض التقديمي.
BelAZ في ROS ونحن في VIST Group نصنع حلول تعدين.Elizaveta Shpiev ، مجموعة VIST.قصة كيف تستخدم VIST Group ROS لإنشاء مهنة ذكية.
رابط لشرائح العرض التقديمي.
رمز الاختبار في ROS هو كيفية بناء سيارة بدون طيار وليس كسر أي شيء.أوليغ شيبتكو ، فيسيليكت.قصة استخدام Google Test (C ++) و Unittest (Python) و Rostest للاختبار في ROS.
رابط لشرائح العرض التقديمي.
تتمثل رؤية الكمبيوتر في الروبوتات في التقاط الأشياء بواسطة معالج وفقا لبيانات من كاميرا RGBD.ألكساندر سيوموشكين ، مختبر سبيربنك للروبوتات.حول كيفية استخدام كاميرا RGBD لالتقاط كائنات باستخدام روبوت باستخدام مناور.
رابط لشرائح العرض التقديمي.
توحيد التنمية الموحدة في العالم.كونستانتين كونوجورسكي ، مجموعة فيست.استمرار قصة الوظيفي الفكري لمجموعة فيست ، أو كيفية الجمع بين لا ينفصم.
رابط لشرائح العرض التقديمي.
ROS Docker تطلق صورة ROS افتراضية على كمبيوتر Linux.ألكساندر سيوموشكين ، مختبر سبيربنك للروبوتات.قم بالإبلاغ عن استخدام Docker لإنشاء صورة ROS افتراضية وتشغيلها على Linux.
رابط لشرائح العرض التقديمي.
ما الأجهزة التي تستمع إليها وما الذي تتحدث عنه.ألكساندر مينشيكوف ، مختبر سبيربنك للروبوتات.استخدام ROS لإنشاء خدمات الاتصال الصوتي.
رابط لشرائح العرض التقديمي.
أعطى اجتماع ROS السابق للمشاركين الكثير من المشاعر الإيجابية وتقارير مثيرة للاهتمام حول استخدام ROS في الروبوتات الحديثة في روسيا ، ونأمل في تطوير مجتمع ROS الروسي بمساعدتكم. لذلك ، ندعو الجميع إلى تقديم عرض تقديمي في اجتماع ROS التالي في 30 نوفمبر 2019 في موسكو.
forms.gle/G3ggYcvFLfuJw1ur6بالإضافة إلى ROS Meetup ، نقوم أيضًا بإجراء تدريب داخلي لـ ROS في مختبر Sberbank Robotics لمشروعاتنا ، ويمكن الاطلاع على مزيد من التفاصيل على
الرابط .
إذا كنت تريد معرفة المزيد عن عملنا أو اتجاهات تطوير الروبوتات الحديثة ، نوصيك بقراءة
المراجعة التحليلية السنوية
لسوق الروبوتات العالمية بعناية.
يبدو لنا أن أول تجربة لجمع المجتمع كانت صحيحة وإيجابية - سنواصل ذلك. ومن
المقرر اجتماع ROS التالي في 30 نوفمبر 2019 !
يمكنك المشاركة كمستمع عن طريق ملء
الطلب وانتظار تأكيد مشاركتك عن طريق البريد.
