
قام فريق مشترك من المهندسين السويسريين والألمان بتحويل حفارة المشي التقليدية إلى روبوت مستقل يمكنه حفر خنادق من تكوين محدد. علاوة على ذلك ، دقة حفر الخنادق عالية جدا - 3 سم.
وفقًا لمطوري المشروع ، يحتاج المهندسون إلى مثل هذه الأجهزة ، حيث يمكنهم تسريع عملية حفر الخنادق في موقع البناء. بالإضافة إلى ذلك ، يمكن للروبوت أن يحفر خندقًا أكثر دقة من أي شخص (باستثناء ، بالطبع ، متخصصون من الدرجة العالية). ولكن هناك مشكلة - على سبيل المثال ، صعوبة عرض خريطة للمساحة المحيطة بالروبوت. المشكلة الأخرى هي تحديد الروبوت لموقعه في تكوين موقع سريع التغير.

لكن كل شيء نجح - قام المهندسون ، بقيادة العالم ماركو هوتير ، بتطوير حفارة مستقلة يمكنها حفر خنادق بمختلف التكوينات بدقة عالية وسرعة. كان الأساس لإنشاء الروبوت هو حفارة المشي منزي Muck M545. قرر مطورو الروبوت استبدال الأنظمة الهيدروليكية للحفارة بأخرى "ذكية" ، حيث يتم تثبيت أجهزة استشعار وأجهزة استشعار مختلفة.
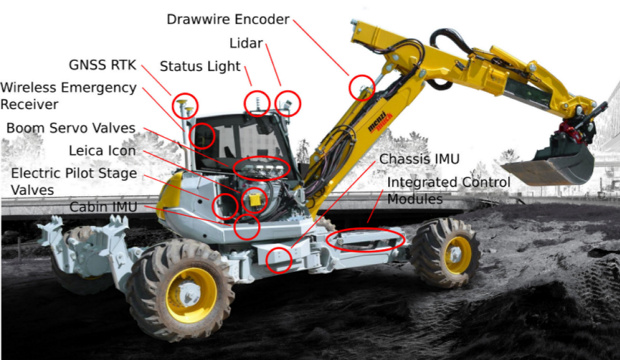
أنها تمكن النظام من "فهم" وتتبع قوة التفاعل مع الأرض. تم تجهيز الحفارة أيضًا بأجهزة استشعار GPS وأجهزة استقبال RTK ، مما يزيد من دقة تحديد موقع النظام ، بالإضافة إلى أغطية ووحدات بالقصور الذاتي. بفضل التنقيح ، تعلمت الحفارة تحديد موقعها بدقة ، وفي الوقت نفسه "تخيل" جيدًا التربة المراد حفرها.
بالنسبة للروبوت ، تم إنشاء خوارزميات خاصة جعلت من الممكن إنشاء نموذج بيئة ، بحساب دقيق لنظام حركات الجرافة اللازمة لإنشاء خندق الشكل المطلوب. واحدة من الصعوبات التي يواجهها العلماء هي أن التربة ، بعد أن يترك الدلو الخندق ، تنهار. أي كمية معينة من التربة تعود إلى مكان تنقيبها. توفر الخوارزميات مثل هذه الفرصة والحفار "يعرف" ما يجب القيام به.
ثم تم اختبار الروبوت في أحد مواقع البناء ، وكان بحاجة إلى حفر خندق مع ملف تعريف في شكل شبه منحرف. بعد الانتهاء من العمل ، اتضح أن دقة النظام حوالي 3 سم. وهذا أعلى بكثير من الدقة التي حصل عليها مطورو البرامج الآخرون.
في المستقبل ، سيتم اختبار روبوت حفارة هذا في ظروف أخرى. يجب أن تكون النتيجة روبوتًا يعرف كيفية العمل بنفسه ، دون إشراف ودعم من الخارج. مثل هذا الروبوت سيساعد البنائين بشكل فعال ، ويسرع عملية حفر الخنادق.
ليس هذا هو المشروع الوحيد لفريق العلماء المذكور أعلاه. كانت تعمل على روبوتات الحفارات والأنظمة الأخرى التي تعمل في موقع البناء لعدة سنوات. لذلك ، تم تحويل حفارة المشي مماثلة
إلى وحدة تسيطر عليها المشغل عن بعد .