تحية طيبة يا عزيزي!
"قطع هيدرو صوتي" ©
من مقالاتنا السابقة ، لم يتغير الوضع بشكل جذري: لم نقم بعد باستكشاف معظم
أحواض المحيط في العالم ، مما يعني أننا بحاجة إلى زيادة الضغط.
لذلك ، أنا أقوي كيف يمكنني ذلك.
سوف أتحدث اليوم بالتفصيل و "على الأصابع" عن أنواع مختلفة من أنظمة الملاحة تحت الماء وفقًا للتصنيف غير الصحيح الثابت ، وما هي ، وما هي إيجابيات وسلبيات ، بشكل عام ، في هذه الحالة أين يجب الركض ، وما الذي يجب الضغط عليه ، وأين يديرون.
أتشتونج: آثار ماتان قد تكون موجودة في المقال!
إذا كانت المياه الهادئة لروحك قد أثارت هذه الإشارة ، فمرحبًا بك في kat!
عندما يتعلق الأمر بأنظمة تحديد المواقع الصوتية
[1] ، يشار دائمًا إلى أنواعها على أنها USBL و LBL و SBL. تعني كلمة "BL" هنا خط الأساس ، أي خط الأساس. أنا هنا أقترح وأبدأ.
ما هو الأساس؟
يتكون خط الأساس من نقطتين مرجعيتين ، والموقع النسبي له معروف في وقت معين. تُظهر الصورة الأولى كيف تحدد هذه النقاط المرجعية مع النقطة المطلوبة مجموعة المثلثات المكانية (
) ، الأساس الذي هو الأساس (
).
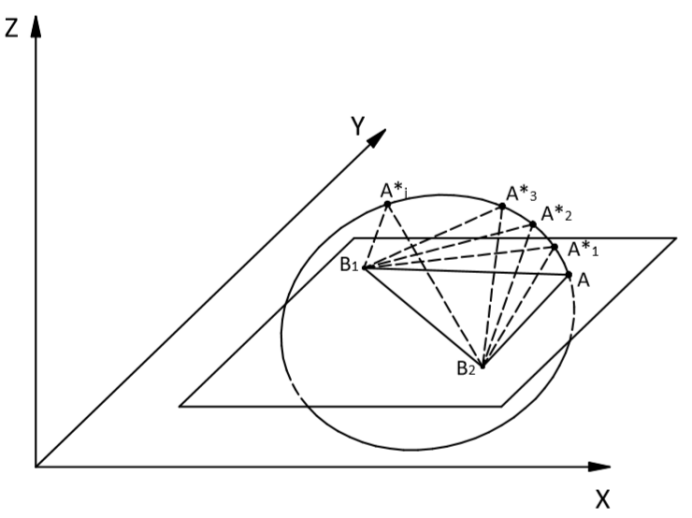 يحدد الخط الأساسي النقطة المطلوبة على الدائرة.
يحدد الخط الأساسي النقطة المطلوبة على الدائرة.يتم تعريف المثلث بواسطة:
- أو على القاعدة ونطاقين ، يتم قياسهما من كلتا النقطتين المرجعيتين والنقطة المرغوبة ، وفي هذه الحالة نتحدث عن ثلاثية الطبقات ؛
- أو في القاعدة واثنين من الزوايا ، وهو ما يسمى التثليث.
انحدار غنائيأثناء كتابة مقال ، كنت أفكر في كيف دخلت فيه على الإطلاق.
تذكرت أنه عندما كنت طفلاً شاهدت فيلمًا ، في العالم ما بعد نهاية العالم ، كان الناس يصطادون التنانين (التي تسببت في نهاية العالم) ، والتي حسبوا موقعهم في الهواء ، ووضعوا "إشارات" على الأرض ، وقد تعلمت بوضوح منذ ذلك الحين أنه للحصول على صورة كاملة من المنارات اللازمة ثلاثة. كلمة "تثليث" متجذرة بقوة في الدماغ في سن المراهقة. أتذكر ما اعتقدت آنذاك: كم هو رائع أن تكون مطورًا لهذه الأشياء.
في الواقع ، حسنا ، أنا هنا!
تعريف المثلث يعني تحديد إحداثيات النقطة المطلوبة.
ينشأ استخدام المثلثات في تحديد الموقع من أعماق القرون والمراجع الأولى موجودة بالفعل في أعمال
تاليس [2] وإقليدس [3] .
خط أساس واحد يعطي العديد من المثلثات التي تقع رؤوسها على دائرة. ولتحديد موقع النقطة المرغوبة في الفضاء ذي البعد n ، يلزم وجود خطوط أساس n + 1. يمكن تخفيض عدد خطوط الأساس المطلوبة إلى n إذا كان أحد إحداثيات النقطة المطلوبة معروفًا ، على سبيل المثال ، عمق (أو ارتفاع
طيران التنين ) ، والذي يُعرف غالبًا من خلال القياس المباشر.
يشار عادةً إلى التعريف الوارد أعلاه لخط الأساس إلى طرق التثليث وثلاثي الطبقات ، ولكن يمكن تمديده إلى طريقة التعدد المتعدد [4].
في هذه الحالة ، تكون الزوايا والنطاقات إلى النقطة المطلوبة غير معروفة ، لكن الفرق بين الأخير معروف (على سبيل المثال ، لحظة إرسال الإشارة من الكائن المطلوب غير معروفة ، ولكن لحظات وصولها إلى كلتا النقطتين المرجعيتين معروفة وقياسها بواسطة ساعات متزامنة ، أي التأخير بين وصول الإشارة في النقاط المرجعية).
يُطلق على وقت وصول الإشارة مضروب في سرعة انتشار الإشارة عادةً الاسم المستعار.
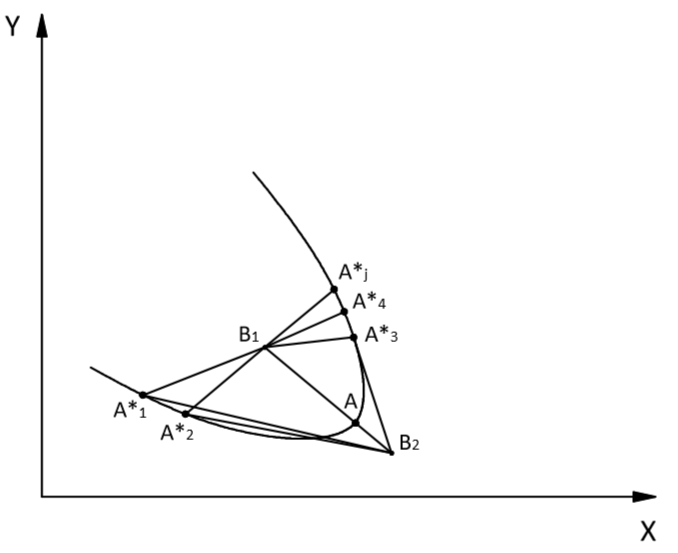 يحدد خط الأساس للعدد المتعدد النقطة المطلوبة على الغلو
يحدد خط الأساس للعدد المتعدد النقطة المطلوبة على الغلومن الصورة أعلاه ، من السهل أن نرى أنه بهذه الطريقة يمكن تعريف عدد لا حصر له من المثلثات (
) تقع رؤوسها التي تمثل موضع النقطة المرغوبة على العمود الزائد. في هذه الحالة ، ستكون نقاط التحكم هي النقاط المحورية في القطع الزائد.
هنا ، كما في حالة التثليث ، يتم تحديد موضع النقطة المطلوبة تمامًا بواسطة خطوط الأساس n + 1 للمساحة البعدية n.
كلمة سيئة لضوابط التصدير
الحقيقة هي أنه ، بناءً على موقع الإحداثيات ، هناك فئتان من الأنظمة:
- فعليًا التنقل (يسمى أنظمة الملاحة مباشرةً) ، حيث يتم إنشاء الإحداثيات على الكائن نفسه (كما في نظام تحديد المواقع العالمي).
- أنظمة التتبع (المراقبة) ، على سبيل المثال عندما يكون هناك نوع من المنارة على الكائن ونحمله.
لذلك ، لمراقبة الصادرات ، هذه الكلمة سيئة للغاية وغير مناسبة ، والتي تم التحقق منها بشكل مأساوي من خلال تجربتنا الخاصة. أن نوضح للجهاز البيروقراطي أن هذا "ليس على الإطلاق ما تفكر فيه" أمر صعب للغاية ومنذ ذلك الحين أطلقنا على أنظمة تحديد المواقع هذه الأنظمة.
نردي فوج هوفي ضوء أوجه الغموض في الترجمة ، تجدر الإشارة إلى أنه لا ينبغي الخلط بين نظام تحديد المواقع ، على سبيل المثال ، مع ما يسمى تحديد الموقع الديناميكي في السفن ، وأنظمة تحديد الموقع الديناميكية (المهندس. DP ، تحديد الموقع الديناميكي) ، هذا عادةً ما يكون من منطقة مجاورة ، ولكنه يعني اختلافًا بسيطًا - أنظمة تسمح للسفينة بالحفاظ على موقعها الجغرافي وتوجهها (الدورة التدريبية) ، و "التحويم" في مكان واحد.
التصنيف المقبول عمومًا وفقًا للحجم النسبي لخط الأساس وعدم اكتماله
عُد الآن إلى الأحرف الأولى من الاختصارات USBL و LBL و SBL. وهي تحدد الحجم النسبي لخطوط الأساس.
بشكل عام ، يتم تحديده بالنسبة إلى الحد الأقصى لحجم المسار المحتمل للكائن الموضع.
إذا كان التفسير بسيطًا للغاية ، على سبيل المثال ، فقد
أجبرنا الغواص المقنع على تعليق منارة المدعى عليه على نفسه ويريد مراقبة تحركاته. "الحد الأقصى لحجم المسار المحتمل للكائن الموضع" هو قطر الدائرة حيث يتناسب المسار الكامل لحركته.
نردي فوج هولكل الشدة ، يجب الإشارة إلى أن مسار الغواص مقصود في نظام الإحداثيات المرتبط بقاعدة القياس. أي إذا تابعنا غطاسًا من قارب مطاطي في وعاء دعم وانجرف معه ، فيمكننا من حيث المبدأ أن ننجرف على بعد بضعة كيلومترات (في الواقع ، لا يمكن القيام بذلك مع الغواصين ، ولكن باستخدام روبوت يتم التحكم فيه عن بُعد - تمامًا). وهذا هو بالضبط المسار المقدر فيما يتعلق بسفينتنا.
من الواضح أن سمة التصنيف هي الحالة ، وأنا أتفق تمامًا. ومع ذلك ، فإن التصنيف المقبول عمومًا منظم على هذا النحو. وهم يميزون:
- USBL ، خط أساس قصير للغاية - أنظمة فائقة القصر ، حيث تكون أبعاد خطوط الأساس أصغر بكثير من مسار الكائن الموضع و
- SBL ، خط الأساس القصير - أنظمة القاعدة القصيرة حيث تكون أبعاد خطوط الأساس قابلة للمقارنة مع مسار الكائن الموضع ،
- LBL ، خط الأساس الطويل - أنظمة خط الأساس الطويل حيث تتجاوز أبعاد خطوط الأساس بشكل كبير أبعاد مسار الكائن الموضع.
هناك بعض الغموض في اختيار الفئة بين الأنظمة القصيرة والطويلة القاعدة ، وغالبًا ، كإحدى علامات الأنظمة القصيرة القاعدة ، فإنها تشير إلى وجود صلة صلبة للعناصر الداعمة مع بعضها البعض - على سبيل المثال ، عندما تكون مثبتة على متن سفينة. العناصر الداعمة للنظام طويل القاعدة ليست مرتبطة كينيميا بأي شكل من الأشكال ، أي التغييرات في مواقعها في الفضاء غير مرتبطة.
نعتبر الآن الأنواع الثلاثة وبعض مجموعاتها بمزيد من التفصيل من حيث نقاط القوة والضعف لديهم.
نظم قاعدة القصر
كما يوحي الاسم ، فإن الخط الأساسي في أنظمة القاعدة الفائقة (أنظمة UKB) أصغر بكثير من مسار الكائن الموضع.
وكقاعدة عامة ، في معظم الأنظمة الحالية (على سبيل المثال ،
هذا [5] ،
[6] وهذا [7] ) UHF ، يتراوح حجم خطوط الأساس من الوحدات إلى عشرات السنتيمترات. معظمها عبارة عن أنظمة متعددة الأبعاد - أي الأنظمة التي تحدد زاوية وصول إشارة المستجيب أو المنارة.
من حيث التصميم ، تتكون هذه الأنظمة من:
- محطة أساسية - جهاز يحتوي على هوائي استقبال متعدد العناصر ، تشكل العناصر الفردية إما صفيف هوائي مرحلي ، في هذه الحالة ، يتم تحديد زاوية الوصول من فرق الطور الخاص بالإشارة الواردة بين العناصر الفردية ، أو مجموعة من خطوط الأساس ، والتي تتكون أيضًا من أزواج من العناصر الفردية ، في في هذه الحالة ، يتم تحديد زاوية الوصول بتأخيرات مختلفة في وصول الإشارة إلى العناصر ؛
لكي لا أمتنع عن حقوق الطبع والنشر للصور ، سأقدم Zima-Base كمثال لمحطة أساسية:
على الطاولة:

في وقت العمل:

- المستجيبات المنارة التي تستجيب لطلب من المحطة الأساسية ، والتي تتيح بدورها تحديد وقت انتشار الإشارة بين المنارة والمحطة الأساسية (المدى المائل) أو أجهزة pingers ، على عكس المستجيبات المنارة ، التي تنبعث منها إشارة على فترات منتظمة. يمكن مزامنة Pinger مسبقًا مع المحطة الأساسية ، والتي تتيح القياس في اتجاه واحد لوقت الانتشار.
على سبيل المثال ، سأقدم مرة أخرى منارة نظام Zima الخاص بنا:
الحكم الذاتي مع علبة البطارية:

TNLA على متن الطائرة:

هناك أيضًا أنظمة يتم فيها ربط أجهزة الإرسال والاستقبال كهربائيًا بمحطة قاعدة ويتم توفير إشارة الاستجواب كنبض بوابة كهربائية.
وبالتالي ، يتم تمثيل فئة أنظمة UKB من خلال مجموعة واسعة إلى حد ما من مختلف عمليات الإعدام المحددة ، وغالبًا ما لا يوفر تصنيف النظام على أنه UKB معلومات كافية عن الطريقة المحددة لتشغيله.
توضح الصورة التالية المبدأ المعمم لتشغيل أنظمة UKB.
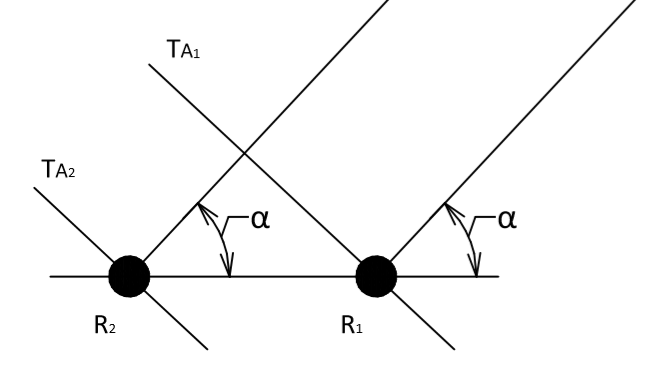 توضيح مبدأ تشغيل الأنظمة التي تحدد زاوية وصول الإشارة
توضيح مبدأ تشغيل الأنظمة التي تحدد زاوية وصول الإشارةيوضح الشكل أعلاه زوجًا من محولات صفيف الهوائي التي تتلقى واجهة إشارة مسطحة. من مسافة معروفة
بين محولات الطاقة والتأخير المقاس
تحددها الزاوية
وصول إشارة.
تشمل المزايا الواضحة لأنظمة UKB التركيب الصغير المطلوب للمعدات والنشر السريع للنظام.
في الحالة العامة ، يمكن
لف المستجيب أو الزنبق
بشريط مثبت ببساطة على كائن محدد ، مما يزيد من عالمية النظام ككل.
في بعض الحالات العملية ، لا جدال في استخدام أنظمة UKB. على سبيل المثال ، عند إجراء بحث عن شيء
مغمور بطريق الخطأ غرق ولم يكن من الممكن إنشاء قاعدة طويلة في ضوء اتساع منطقة البحث ، أو عندما لا يسمح لك عمق المكان بتعيين قاعدة طويلة عائمة ، ولا يكون هناك ما يبرر تثبيت القاعدة السفلية من حيث الأطر الزمنية و / أو الطقس شروط.
ومع ذلك ، فإن أنظمة UKB لها عيوب خطيرة. على سبيل المثال ، لتحديد موضع الكائن الموضع في الإحداثيات المطلقة ، يجب أن تكون المحطة الأساسية نفسها محددة تمامًا في الفضاء: يجب أن تعرف ليس فقط موقعها الجغرافي ولكن أيضًا اتجاه مجموعة الصفيفات في الفضاء: زاوية السمت ، زوايا اللف والتقطيع.
وهذا يعني ، من وجهة نظر هيكلية ، أن نظام UHF يجب ألا يشمل فقط صفيف هوائي متعدد العناصر ، وهو في حد ذاته معقد هيكلًا تمامًا ، ولكن أيضًا الأجهزة التي يمكنها تحديد موقعها في محاسيس إمالة فضائية على محورين أفقيين ومستشعر العنوان - مغناطيسي أو بوصلة GNSS. إذا تم تثبيت هوائي تحديد الاتجاه على شيء ما تحت الماء ، فحينئذٍ ، تكون إمكانية استخدام بوصلة GNSS مغلقة.
علاوة على ذلك ، منذ ذلك الحين يتم تقدير موضع الكائن المطلوب إما بزاويتين لوصول الإشارة (أفقيًا وعموديًا) أو بالزاوية الأفقية والعمق (وهو عصري وتدريجي) المرسلة في إشارة المستجيب أو الزنجبيل ، فمن الواضح أن الدقة الزاوية الزاوية
سوف توفر أنظمة زيادة مع مجموعة من الاثنين معا
خطأ الموضع المحدد للكائن الموضع ، مع تزايد المسافة بما يتناسب مع ظل الخطأ الزاوي ، الموضح في الصورة التالية:
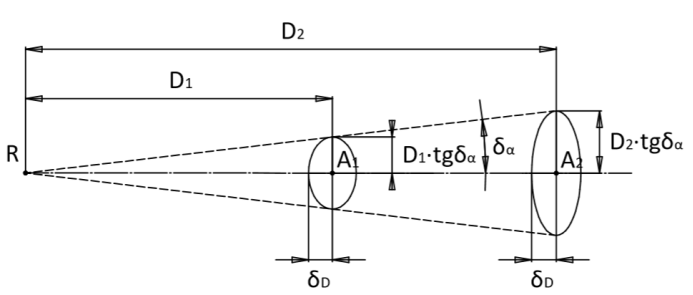 تأثير الدقة الزاوية لأنظمة UKB على الخطأ في تحديد موضع الكائن الموضع
تأثير الدقة الزاوية لأنظمة UKB على الخطأ في تحديد موضع الكائن الموضعيوضح الشكل أعلاه انتشار الموقع المحدد لمصدر الإشارة. واحد من شبه محاور القطع الناقص
يحددها الخطأ في قياس المسافة ، والآخر ، كما
حيث D هي المسافة (المدى المائل) إلى المصدر.
علاوة على ذلك ، في حالة الغموض واستحالة تحديد مضمون لحزمة مباشرة (شعاع - قراءة مقدمة الإشارة ، نداء مباشر الذي جاء مباشرة من المصدر ، دون أن ينعكس من أي شيء) ، فإن أنظمة UHF ككل تتأثر بشدة بالانتشار متعدد المسيرات ، خاصة إذا هناك انعكاسات من الساحل أو أي عناصر من المشهد تحت الماء.
بمعنى آخر ، في ظل وجود إشارات منعكسة قوية قادمة من اتجاهات أخرى (حتى عكس ذلك) ، فإن نظام UHF ليس محصنًا من قبول مثل هذه الإشارة بشكل مباشر (نظرًا لأن هذه المشكلة عمومًا غير قابلة للحل - يمكن أن يكون مجموع الإشارات المنعكسة أقوى ، "أعلى من الصوت" من الإشارة المباشرة) في بعض الأحيان في الممارسة) ، مما يؤدي إلى نتائج غير صحيحة تماما في حل مشكلة التنقل.
تستخدم الأنظمة الأحدث قياسًا مباشرًا لعمق المستجيب أو الزنجبيل ، بينما تحدد الأنظمة الأقدم الموضع بزاويتين. والحقيقة هي أن الزاوية العمودية لديها أقل يقين ، ل يمكن أن يمر الصوت ككل بانعكاسات متعددة للأسطح السفلية ، وتعريفه لا ينطبق إلا على أصغر المسافات. يظهر هذا في الصورة أدناه ، حيث يظهر القسم الرأسي للقناة في الصورة العليا ، ويمكن ملاحظة أنه عند تحديد الزاوية الرأسية من إحدى الإشارات المنعكسة ، قد يكون الخطأ غير مقبول تمامًا. في الوقت نفسه ، في الجزء السفلي من الشكل ، حيث يتم عرض منظر علوي ، يُرى أن جميع الإشارات المنعكسة تأتي من نفس الاتجاه الأفقي.
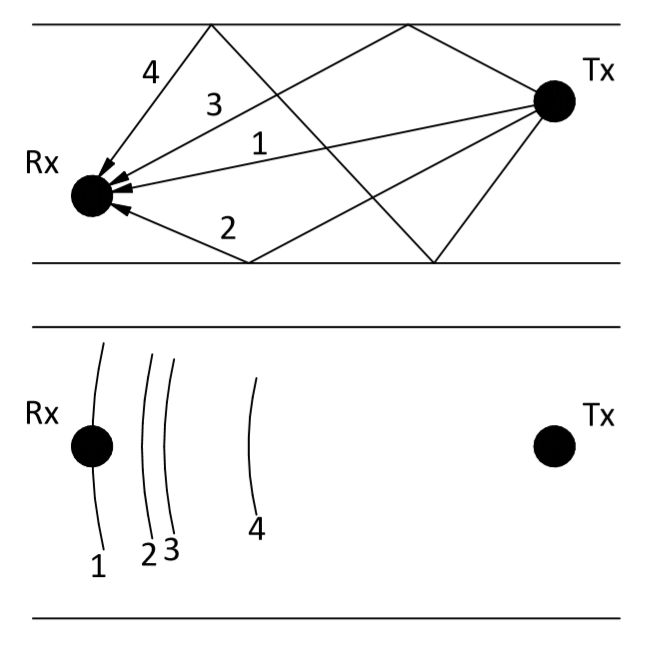 دقة مختلفة في تحديد الزوايا الأفقية والرأسية في أنظمة UKB
دقة مختلفة في تحديد الزوايا الأفقية والرأسية في أنظمة UKBبتلخيص مناقشة أنظمة UCB ، يمكننا القول أن مجال تطبيقها هو حيث يكون من الصعب أو غير المبرر أو المستحيل استخدام أنواع أخرى من أنظمة الملاحة وأنظمة تحديد المواقع.
تقرير الشركات المصنعة للأنظمة UKB الحديثة دقة الزاوي لمنتجاتها تصل إلى 0.03 درجة (1σ)
[8] .
ميزتهم: سرعة النشر وبراعة.
من تجربة التواصل مع المستخدمين ، يمكنني القول إن كل من حولك يريد UKB فقط بسبب سرعة النشر. وبغض النظر عن المبلغ الذي أشرحه ، بغض النظر عن المبلغ الذي أكتبه ، فإن إيماءات الجميع ، لكنهم ما زالوا يريدون استخدام UCB. كما يقول المثل: "لا تنس أن تعاني".
يستخدم بعض عديمي الخبرة عمومًا USBL المختصرة كتسمية لأي نظام لتحديد المواقع تحت الماء.
نردي فوج هووالفضول أكثر فضولاً عندما يسمى أي شيء الصوتية المائية السونار. نحن رجال يعرفون القراءة والكتابة ونتذكر أن السونار يشبه الرادار ، فقط مع الصوت ، أي السونار ، لكن هذه قصة مختلفة تمامًا.
نظم قاعدة قصيرة
تقع النظم القصيرة في الغالبية العظمى من الحالات على هياكل السفن المتخصصة. وهذا يعني أن أبعاد خطوط الأساس قابلة للمقارنة بأبعاد السفينة.
في الوقت الحالي ، تعد دقة أنظمة UHF عالية جدًا ، وتبدو راحة الاستخدام أكثر ربحية من KB ، مما أدى إلى انتزاع أنظمة KB من الاستخدام الواسع النطاق ، والمهام التي تحلها أنظمة KB تتضمن الآن فقط تلك التي لديها شروط محددة لا تسمح تطبيق نظام UKB.
ومع ذلك ، في الماضي ، تم استخدام مكاتب التصميم ، على سبيل المثال ، لمرافقة حوض الاستحمام Triest-1 إلى موقع وفاة الغواصة البحرية الأمريكية Thresher (USS Thresher). تم استخدام نظام SHARPS SBL KB في حفرة علوم المحيطات في Woods لمرافقة مركبة JSON في أعماق البحار إلى قاعدة الهبوط MEDEA ، وتم الإبلاغ عن دقة تحديد المواقع المحققة البالغة 0.09 متر [9].
بالنسبة لأنظمة KB الحديثة ، يمكننا ملاحظة
هذا النظام [10] ، الذي وضعته الشركة المصنعة باسم "Underwater GPS" ، ويتم توزيعه كمصمم.
من أجل لفت الأنظار إلى كل سحر و "بساطة" النشر ، سأقدم بعض الصور من اختباراتنا الأخيرة لمكتب تصميم النماذج الأولية لإيقاف مركبة مستقلة تحت الماء:

الإطار الألومنيوم هو قاعدة قصيرة. يمكنك أن تتخيل راحة إطلاق هذا التصميم.

في الإنصاف ، تجدر الإشارة إلى أنه خلال أيديولوجية العمل ، ينبغي أن ينهار مرة واحدة فقط. لقد اضطررنا أيضًا إلى رفعه أثناء الاختبارات - حيث يكلف الملف الشخصي النقود ، ولا تقع السماعات على الطريق.
تلخيص مراجعة أنظمة KB ، نلاحظ أن:
تشمل مزايا أنظمة KB:
- سرعة النشر والتنقل (تُركب الأنظمة عادة على متن سفينة) ؛
- في المتوسط ، دقة أعلى مقارنة بأنظمة UKB (على الرغم من ذلك ، يجب أن يؤخذ في الاعتبار أن بعض UKBs من الدرجة العالية ، على سبيل المثال [8] ، تظهر بشكل عام دقة أكبر لتحديد المواقع من بعض KBs أبسط مثل GPS Waterlinked GPS المذكور بالفعل [10] ) .
بواسطة cons يمكن أن تتضمن KB العيوب نفسها المتأصلة في أنظمة UHF ، وهي:
- الحاجة إلى تحديد اتجاه قاعدة القياس (خطوط الأساس) - عند زوايا الدورة ، قم باللف والقص بالإضافة إلى الارتباط بالموقع الجغرافي المطلق ؛
- ارتباط الأخطاء في تحديد أوقات الوصول على العناصر الأساسية بالنظر إلى اتصالها الحركي ، على سبيل المثال ، بسبب النغمة
- ونظرًا لأن مكتب التصميم يمكن أن يعمل عمومًا كنظام goniometric ، فإنه يخضع أيضًا لمشكلة تقليل الدقة عند نقل كائن محدد من القاعدة.
- ( «») .
هذه هي النوع المفضل لدي من الأنظمة. DB - يعني قاعدة طويلة ، وليس ما فكرت . أبعاد خطوط الأساس أكبر بكثير من مسار الكائن الموضع ، ولا ترتبط العناصر الأساسية مع بعضها البعض بشكل حركي. كقاعدة عامة ، يمكن أن تكون القاعدة هي القاع ، مثل [11] و [12] ، عندما تكون عناصرها في القاع ، أو يمكن أن تطفو عندما تكون عناصر الدعم من العوامات المزودة بمستقبلات GNSS ، وهنا يمكننا الاستشهاد بأنظمة كأمثلة [13] ] و [14] ، أنظمة GPS GNSS [15] ، GLONASS [16] ، Galileo [17] ، Beidou [18] وبعض من سبقوهم - أنظمة DECA [19] ، Chaika [20] و LORAN [21].توفر أنظمة DB أقصى درجات الدقة في تحديد موضع الكائن الموضع لأن الحجم مهم ويخلو إلى حد كبير من العديد من عيوب أنظمة UCB و KB ، مثل تقليل الدقة عند الابتعاد عن القاعدة - توفر DB في المتوسط نفس الدقة داخل قاعدة التنقل ، وعند الخروج يمكن للكائن الموضع منه أن يستمر في العمل كنظام goniometric.أنظمة الديسيبل أقل عرضة للأخطاء المرتبطة بالانتشار عبر مسيرات متعددة ، كما هو موضح أدناه - إذا تم تحديد الحزمة المباشرة بشكل غير صحيح ، يمكن أن يكون فارق وقت السفر صغيرًا (وحدات متر) ، ويمكن تعويضه بسهولة بوجود نقاط مرجعية زائدة ، في أسوأ الحالات فقط خطأ في تحديد موقع ترتيب الفرق في مسار الحزمة ، في حين أن UCB يمكنه تقدير زاوية وصول هذه الحزمة ، والتي يمكن أن تتحول إلى أي شيء تقريبًا ، والتي خطأ غير مقبول على الإطلاق.من بين السلبيات لأنظمة DB ، أهمها تعقيد التثبيت ، وهذا صحيح بشكل خاص في حالة القاعدة السفلية - أولاً ، يجب أن توفر العناصر السفلية استقلالية كافية لزيادة الفاصل الزمني لوقت الخدمة ، وثانياً ، لأن وكقاعدة عامة ، تعمل هذه الأنظمة على أعماق كبيرة (من 500 متر وأكثر) ، ثم يتم فرض متطلبات إضافية على مباني normobaric ، وثالثا ، هناك مشكلة إضافية تتمثل في إزالة القاعدة عند الانتهاء من العمل.وأخيرًا ، بعد تثبيت القاعدة ، يجب تحديد موقع عناصرها بدقة جيوديسية ، على سبيل المثال ، باستخدام طريقة DB الافتراضية أو أنظمة UCB باستخدام مجموعة كبيرة من القياسات.كل هذه العمليات تتطلب معدات متخصصة وباهظة الثمن وعمل العديد من المتخصصين المؤهلين تأهيلا عاليا.أبسط بكثير هو الحال مع القاعدة العائمة. يمكن تثبيت عوامات الاستلام أو الإرسال أو الاستقبال أو الإرسال المائية من أي سفينة مائية تقريبًا (وضعناها في 15 دقيقة من قارب قابل للنفخ في التجديف) ، نظرًا لسهولة التركيب والإزالة ، يمكن أن تتمتع العناصر الداعمة باستقلال قليل ، ويمكن جعل هياكلها في الغلاف الجوي عمومًا الأداء.تجدر الإشارة إلى أن استخدام قاعدة عائمة أمر معقد للغاية عند العمل في أعماق كبيرة لسببين: الأول هو صعوبة تثبيت المرساة ، التي يتم حلها من حيث المبدأ بواسطة قاعدة عائمة مزودة بمحركات ، والتي تضمن الحفاظ التلقائي على الموقع الجغرافي ، والثاني أكثر خطورة ، وغالبًا ما يكون يستبعد استخدام قاعدة عائمة عند العمل على أعماق كبيرة - وجود انعكاس داخلي كلي للإشارة من طبقة القفزة (بمعنى طبقة القفزة في سرعة الصوت. فصل طبقات المياه بأشكال مختلفة الكثافة ، والتي يمكن أن ينعكس الصوت تماما).الحل الوحيد هنا هو إزالة الهوائي الصوتي تحت طبقة القفز ، والذي بدوره يخلق المزيد من المشاكل - تعقيد تحديد المواقع الطبوغرافية لهوائي الصوت المائي ، وزن الكابل ، تصميم معقد للغاية ، وهنا نحن مرة أخرى حيث بدأنا.تقليديًا ، كمثال مرئي ، أحضر نظام RedWAVE DB الخاص بنا ، العوامات (الغواص فريد وغير مدرج): وجهاز استقبال الملاحة:
استقبال الملاحة:
لدينا العديد من المقالات حول هذا النظام. نظم قاعدة طويلة الظاهري
النظم القائمة على ما يسمى القاعدة الطويلة الافتراضية [22] [23] [24] (VDB ، الإنجليزية VLBL - خط الأساس الافتراضي الطويل) تستحق أن يتم تخصيصها كمجموعة منفصلة لأسباب التصميم والتخطيط.يكمن جوهر أنظمة VDB في أن النطاقات المائلة إلى المستجيب أو أوقات وصول إشارة الزنابير تقاس في نقاط مختلفة في الفضاء ، وهذا النهج صحيح إذا تم استيفاء شرط واحد: الكائن الموضع يحافظ على موضع ثابت ، والنقطة المرجعية المتحركة تشكل عناصر من قاعدة التنقل عن طريق صنع أو قياس المسافة للمدعى عليه أو تحديد أوقات وصول إشارة الزنجبيل من مواقع مختلفة.تتمتع هذه الفئة من أنظمة الملاحة ، بكل قيودها الواضحة ، بأوسع الآفاق: أولاً ، لا تتطلب أي معدات معقدة ، كما هو الحال في أنظمة UHF - يتم حل المهمة اسمياً فقط باستخدام جهازين للإرسال والاستقبال ، لا يتطلبهما ما أو بطريقة خاصة للتوجيه في الفضاء. في حالة الزنجبيل ، من الممكن تنظيم بحث تعاوني عن الزنجبيل باستخدام قطيع من المركبات السطحية المستقلة. هذا صحيح بشكل خاص عند البحث عن الكائنات الغارقة (على سبيل المثال ، الطائرات المحطمة أو السفن) في منطقة غير محدودة من الناحية النظرية. أيضًا ، إحدى طرق تحديد موقع عناصر القاعدة السفلية الطويلة هي طريقة WDB.على سبيل المثال ، سأقدم مشروعنا التجريبي (حتى اثنين!) لقاعدة طويلة افتراضية على جهازي المودم uWAVE الصغير.تم وصف المسودة الأولى في أحد مقالاتنا السابقة . هناك ، تم دمج المودم ووحدة GNSS ووحدة الراديو باستخدام لوحة على STM32.في التناسخ الجديد لهذا المشروع ، تمت إعادة كتابة الكود إلى Arduino UNO ، ويتم تنفيذ حل مشكلة الملاحة في تطبيق مفتوح المصدر .نظم مجتمعة
تحتوي الأنظمة المدمجة عادةً على عناصر من فئتين أو أكثر من الأنظمة. لذلك ، على سبيل المثال ، هناك حلول تقنية موصوفة في المراجعة [1] تجمع بين قاعدة طويلة قابلة للنشر وقاعدة قصيرة مركبة على سفينة ، وتتمثل مهمتها الرئيسية في وضع عناصر قاعدة طويلة. من الواضح ، يمكن أيضًا تحديد موضع عناصر القاعدة الطويلة بمساعدة أنظمة UKB.بشكل عام ، يمكن القول أن اختيار مخطط تخليقي معين يتم تحديده ، بشكل غريب بما فيه الكفاية ، بواسطة المشكلة التي يتم حلها.في الغالبية العظمى من الحالات ، فإن الهدف من تخليق فئات مختلفة من الأنظمة هو الموضع الأولي لنقاط الدعم لقاعدة طويلة.الغريبة
نحن هنا نتطرق بإيجاز إلى بعض فئات الأنظمة ، في أقرب وقت غير مباشر وبشكل رسمي بموضوع المقال.من بينها ، النظم الصوتية القائمة على حساب الموتى مبنية على ما يسمى يتأخر دوبلر ، وهي الأجهزة التي تقيس سرعة كائن تحديد المواقع بالنسبة إلى القاع عن طريق إصدار إشارة صوتية في ثلاثة أشعة على الأقل موجهة بشكل ضيق واستقبالها اللاحق. تؤدي حركة الكائن بالنسبة إلى القاع إلى ظهور تحول تردد دوبلر للإشارة المنبعثة المكتشفة في مرحلة الاستقبال.يتم إعادة حساب تحول دوبلر في إسقاط السرعة على طول ثلاثة محاور. بالاقتران مع قراءات مستشعر العنوان (بوصلة) وقراءات مقياس التسارع ، يتم تشكيل سلسلة من القرارات لموقع الكائن. يتطلب بدء هذا التسلسل تحديد موضع أولي. هذا النوع من النظام له تطبيقات عسكرية بشكل أساسي بالنظر إلى السرية النسبية والاستقلال الذاتي. إنه يحتوي على جميع عيوب أنظمة الحساب الميتة المرتبطة بالتراكم السريع للأخطاء. أي
تنخفض الدقة بمرور الوقت.لا يزال هناك الغريبة الغريبة وغريبة جدا. إلى الأول ، أود أن أشير إلى الأنظمة القائمة على تحليل الصور السفلية ( CARL! ) ، والثانية ، التنقل من خلال تقلبات المجال المغناطيسي ( CARL !!! ). فيما يتعلق بالتطبيق العملي لكليهما ، أريد ، كما يقولون ، "التعبير عن القلق الشديد".في المخلفات الجافة
لذلك ، في التصنيف الحالي هناك ثلاث فئات رئيسية من أنظمة الملاحة السونار:- , - . , , , . [1] 0.5-0.2% .
- , ( ) , ; , -, , [1] , 0.5% ;
- خط الأساس الطويل ، حيث يتم تحديد موقع الكائن بواسطة ثلاثة أو أكثر من النطاقات المائلة (أو الاختلافات) ، تقاس بثلاث نقاط مرجعية متباعدة على نطاق واسع. يصعب استخدام هذه الفئة من الأنظمة وصيانتها ، ويمكن تنفيذها في نسختين مختلفتين للغاية - القاع والقاعدة العائمة ، ووفقًا للمؤلف [1] ، فإن الدقة القصوى مقارنة بفئات الأنظمة الأخرى - حوالي 0.1٪ من عمق المكان. في نفس المكان ، في مراجعة Vickery التي قمت بمسحها بالفعل ، تم الإبلاغ عن القيم المطلقة لخطأ تحديد موضع الكائن الموضع للأنظمة التي تعمل في نطاقات تردد مختلفة - من 2-3 متر للأنظمة منخفضة التردد (حتى 15 كيلو هرتز) ، وحتى متر واحد للأنظمة متوسطة التردد (19-36) كيلو هرتز) وما يصل إلى 5 سم للأنظمة العاملة على ترددات من 50 إلى 110 كيلو هرتز.
PS
شكرًا جزيلاً على اهتمامك ، سنكون سعداء بالاستماع إلى النقد البناء والإجابة على الأسئلة.
إذا كانت هذه المقالة ستثير اهتمام القراء ، فإني أخطط في المقالة التالية للحديث عن التصنيف الصحيح لأنظمة الملاحة تحت الماء.
إذا سارت الأمور على ما يرام ، فسأقوم في مقال آخر بتحليل عدة خوارزميات لتشغيل أنظمة الملاحة مع أمثلة الكود.