نحن نحب الروبوتات. نحن طلاب الجامعات التقنية والمصممين ومهندسي الإلكترونيات والمبرمجين ، وكلنا نحب إنشاء روبوتات. قبل عامين ، ظهر فريق setUP لدينا على أساس مختبر Sberbank للروبوتات ، وفي الوقت نفسه شارك في المسابقة من أجل إنشاء الروبوتات المستقلة المتنقلة Eurobot Open لمحبي الروبوتات الشباب. في هذه اللحظة ، لعب الفريق 2 مواسم ، أصبح مرتين نائب بطل ، دخلت المسرح الدولي. لم ننام لعدة أيام ، وقمنا ببرمجة ، وملحوم ، وتجميع وتفكيك روبوتاتنا ، ووجدنا مشاكل خطيرة قبل ساعة من المنافسة ، ثم بدأوا. لقد حصلنا أيضًا على تجربة لا تنسى واكتسبنا عددًا من الحلول المثيرة للاهتمام ، والتي نريد أن نتحدث عنها في سلسلة من المقالات (مع العديد من GIF ، بعناية ، وحركة المرور).

Eurobot Open هي مسابقة دولية للروبوتات المستقلة. تتغير المهام وساحة المعركة وعناصر اللعبة كل عام ، ولكن يبقى جوهرها كما هو - يجب على الفريق إنشاء روبوتين مستقلين يتنافسان مع روبوتات الخصم في حقل صغير للحصول على موارد محدودة لمدة 100 ثانية. يخفي هذا الاقتراح القصير عددًا كبيرًا من المهام التي يجب على الفريق حلها ، لأن الروبوتات يجب أن تكون سريعة وسهلة المناورة وأن تكون قادرة على القيام بالمهام بشكل مستقل وألا تواجه العدو. وكل عام من الضروري تطوير روبوتات جديدة. ومع ذلك ، فإن تجربة وإنجازات السنوات الماضية يمكن أن تعطي ميزة كبيرة. من سنة إلى أخرى ، نحتاج إلى أنظمة التعريب ، وتنبؤات حركات العدو وتجنب الاصطدامات ، ومخططي الطريق ، وأنظمة إدارة السلوك المرنة ، والالكترونيات والميكانيكا الخاصة بنا. نعم ، يوجد الكثير من هذا الخوارزميات والمكتبات القياسية ، ومع ذلك ، لا يزال معظمها بحاجة إلى تعديل قوي أو كتابتها من نقطة الصفر بسبب خصوصية الوظيفة ومتطلبات استهلاك الموارد.
 فريقنا في المباراة النهائية الروسية في موسكو.
فريقنا في المباراة النهائية الروسية في موسكو.فيديو رائع حول مشاركتنا في 2019:
كان موضوع الألعاب الرئيسي في عام 2019 هو الطاقة النووية. لكن هذا لا يعني أن الفرق كانت مطلوبة لصنع روبوت يعمل بمحرك نووي. فقط تم إعطاء مهام وعناصر لعبة مختلفة أسماء موضوعية. كائن اللعبة الوحيد للتلاعب هو كرات الصولجان للهوكي - الإلكترونات. لديهم أوزان مختلفة ، وألوان مختلفة ، وواحدة ، "الذهب" ، من حجم مختلف. من الضروري جمع أكبر عدد من الغسالات الموجودة في أماكن مختلفة من الحقل ، في مواقع مختلفة ، على ارتفاعات مختلفة ، ثم فرزها إلى مناطق في الحقل ، اعتمادًا على نوع العنصر الكيميائي.
 هذا هو شكل الملعب في 2019.
هذا هو شكل الملعب في 2019.كانت أسماء الرموز لأجهزة الروبوت الخاصة بنا هذا العام هي Chip and Dale. لماذا؟ أعتقد أن الجواب واضح من الصورة:
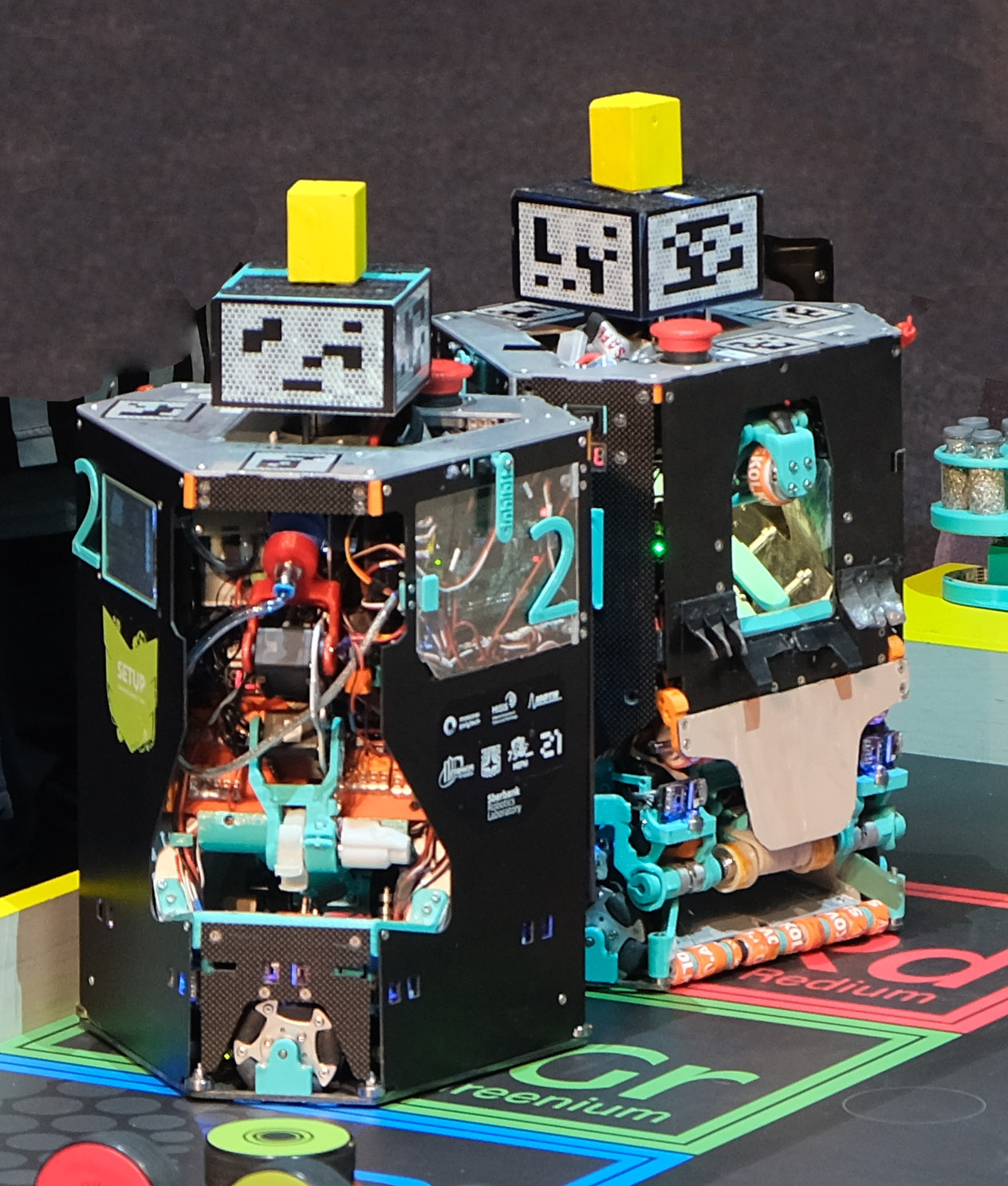
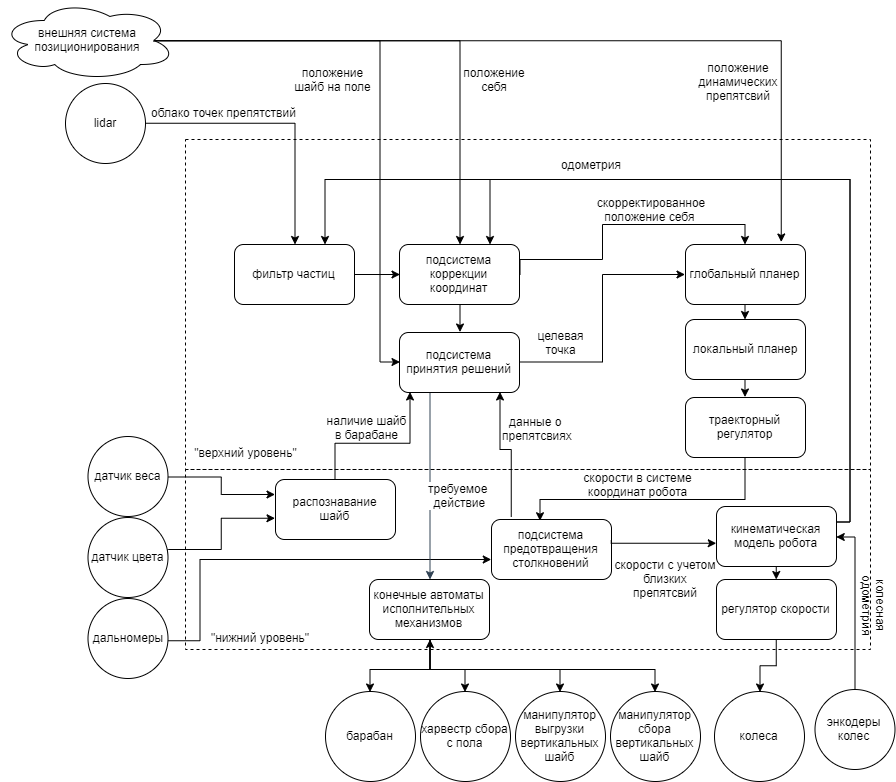
دعنا نذهب إلى الحلول التقنية الأساسية في الروبوتات لدينا الموسم الماضي. حاولنا هذا العام قدر الإمكان توحيد كل شيء وكان لدينا روبوتان مزدوجان. المخطط الهيكلي للروبوتات لدينا في الصورة أدناه.
تم تمثيل المستوى العلوي عن طريق اختبار لوح واحد Odroid xu4 مع أوبونتو 16.04 و ROS الحركية على متن الطائرة. جميع المهام "الصعبة" تدور حولها.
في المستوى السفلي ، يعمل STM32F407VGTX-DISC1 ، عالقًا في درع مصمم ذاتيًا يسمح لك بتوصيل عشرة محركات وخدمة ومجموعة من المستشعرات بشكل ملائم. بالمناسبة ، هم دائما الحصول على كمية مثيرة للإعجاب. يحتوي كل من روبوتاتنا على ليدار و 7 محركات تيار مستمر / bldc و 9 الماكينات وحوالي 25 جهاز استشعار مختلف (الألوان والأوزان والمسافات والتيارات). وكل هذا ، بالإضافة إلى 6 آليات حجمية ، وضعت في روبوتات مدمجة يبلغ محيطها 850 وبارتفاع 350 ملم. FreeRTOS ، الذي يخدم المهام التي تتطلب التنفيذ في الوقت الحقيقي ، وتجهيز جميع أجهزة الاستشعار وأجهزة الدولة ، هو الغزل على STM نفسها.
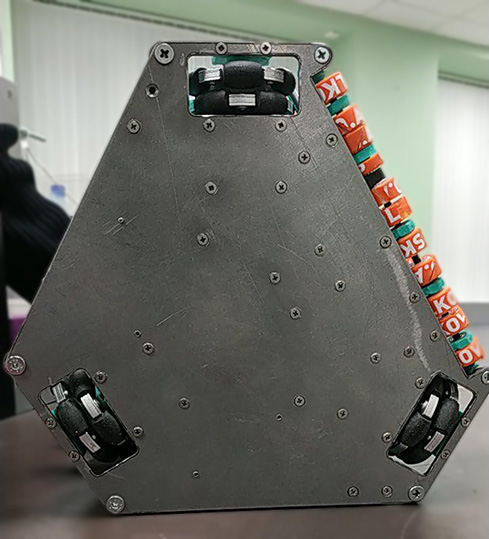 عرض من كل مكان من الروبوت.
عرض من كل مكان من الروبوت.ميزة مثيرة للاهتمام هي استخدام منصة omni-wheel كمحرك ، والذي يسمح لنا بالقيادة في أي اتجاه وعلى أي من الجانبين دون إجراء المنعطفات غير الضرورية ، مما يزيد بشكل كبير من قدرة الروبوت على المناورة.
لذلك ، على سبيل المثال ، في الفيديو التالي من المباراة التي عقدت في فرنسا ، يمكن أن نرى كيف ، على الرغم من أننا قد تم حظرنا (بسبب انتهاك صارخ للقواعد من قبل الخصم) ، خرج الروبوت من فخ المجوهرات.
ومع ذلك ، بسبب دقة متعددة ، دقة قياس المسافات عرجاء: عجلات ليست مستديرة تماما ، بكرات تلعب ولها بقعة اتصال صغيرة. لحل هذه المشكلة ، يمكنك التغلّب على الحائط بشكل دوري أو إعادة تعيين الخطأ أو تطبيق أنظمة الضبط الخارجية. في كثير من الأحيان ، يتم وضع النجوم على الروبوتات لهذا الغرض. ظهر حل آخر منذ عامين: تمت إضافة مكان إلى الحقل حيث يمكنك وضع الكاميرا. في العام الماضي ، سافرنا فقط من خلال كاميرا خارجية مع الكشف عن علامات aruco المطبقة على الروبوت ، ولكن في هذا الوقت عملنا على توطين باستخدام lidar على الروبوت وكاميرا خارجية (الترجمة والانتقال سيكون قريبا مقالة أخرى مثيرة للاهتمام). لم يكن لدينا وقت لاختبار اللدار ، لذلك ركبنا حول الكاميرا واستخدمنا اللودر كموقف للركاب. مزايا النظام - نحن نعرف موقف جميع الروبوتات في هذا المجال. من السلبيات - حساسية عالية للضوء الخارجي ودقة المعايرة ، والتي ، للأسف ، أخفقنا أكثر من مرة. لكن بشكل عام ، يتيح لنا الجمع بين القياس الكمي والكشف عن الأراديو وضع أنفسنا بدقة عدة ملليمترات في حقل 2 × 3 متر.
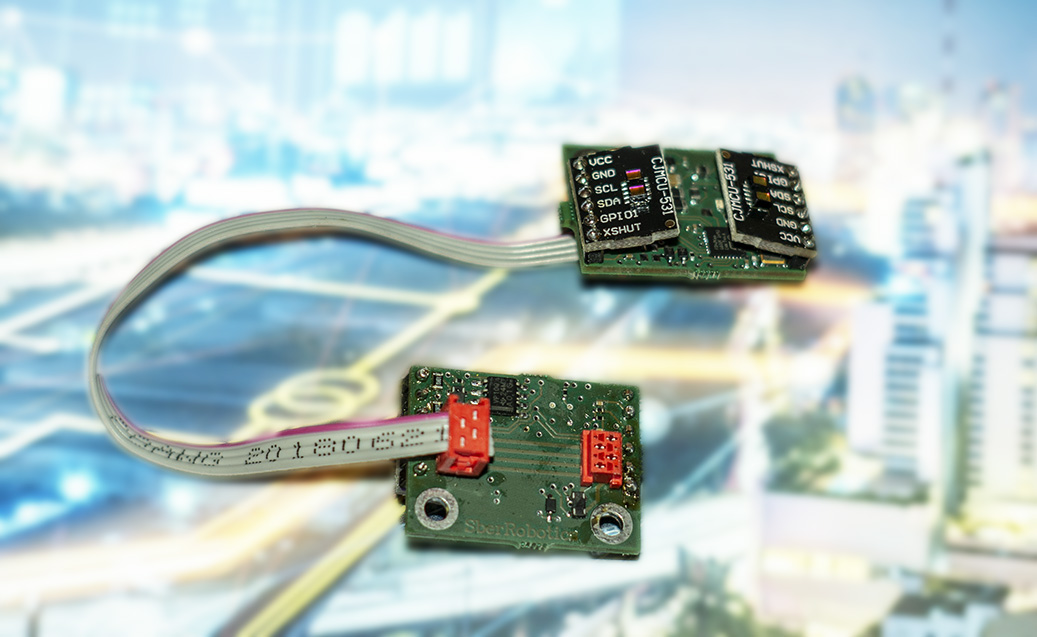 لدينا مجلس rangefinder المتقدمة.
لدينا مجلس rangefinder المتقدمة.تحظر القواعد التصادم مع الروبوتات الأخرى (لهذا يمكنهم أيضًا استبعادهم) ، لذلك من المهم أن يلاحظ الروبوت العقبات في طريقه في الوقت المحدد. عادةً ، لرصد المنطقة القريبة ، يتم تثبيت محددات نطاق الأشعة تحت الحمراء العادية أو Sharp GP2Y0A21YK ، والتي تعتبر شديدة الحساسية للسطح ، على سبيل المثال ، يمكنهم العمل على الألومنيوم المصقول من نصف متر ولا يزالون لا يرون الكربون قيد التركيز. غالبًا ما تستخدم أدوات تحديد المدى بالموجات فوق الصوتية ، لكنها حساسة لزاوية السطح العاكس وتخشى التداخل المتبادل. في الآونة الأخيرة ، تكتسب محددات المدى ToF ، على سبيل المثال ، VL53l0x أو VL53l1x ، شعبية بسرعة. بعد أن جربت هذه المستشعرات مرة واحدة ، من الصعب رفضها - فهي تعتمد اعتمادًا ضعيفًا على مادة العائق والدقة العالية والاكتناز والسعر المنخفض. ومع ذلك ، حاولنا العام الماضي استخدام VL53l0x وعدد من الفروق الدقيقة التي ظهرت. ماذا يمكن أن يحدث عندما تضع عشرات واثنتان من أدوات ضبط المسافة على i2c ، بين مجموعة من المحركات و serv؟ بالإضافة إلى ذلك ، لا يمكن لأجهزة الاستشعار تعيين عنوان ثابت ، حسنا ، والكرز في تعليقهم الوهمية. لذلك ، قمنا هذا العام بالتبديل إلى rs485 ، الأمر الذي سهّل إلى حد كبير استخدام أدوات ضبط المسافة. في صور الروبوت ، الأضواء الزرقاء هي لهم.
نحن هنا في كل وسيلة ممكنة نمنع الروبوت من الانتقال مباشرة بين نقطتين ، وتبين بعناد أنه أكثر ذكاءً منا:
باستخدام نظام تعريب خارجي ، يسمح لك طائرة شراعية كاملة ، بالإضافة إلى تجنب تصادم رائع بالقرب من المنطقة بتنفيذ هذه الأشياء بسرعة 1m \ s. في المقالات التالية ، سنحاول معرفة الحد الأقصى عن الأشياء الأكثر إثارة للاهتمام من قراراتنا (وفتح الأساس) ، ولكن اليوم نريد أن نتحدث عن ميزة الميكانيكا هذا العام.
يتميز تصميم الميكانيكا لـ Eurobot بخصوصياته. أولاً ، نظرًا لأن هذه مسابقة ، يجب أن يعمل كل شيء في أسرع وقت ممكن وموثوقة بنسبة 100 في المائة. ثانياً ، تم تعيين المهمة بحيث كلما زادت النقاط التي تريد كسبها ، زادت صعوبة تصميم الميكانيكا. وكلما زادت تعقيد الميكانيكا ، زاد احتمال فشلها ، والتي وفقًا لقانون مورفي ، ستحدث في أكثر اللحظات غير مناسبة.
قد تبدو المهام بسيطة للوهلة الأولى ، لكن هذا ليس صحيحًا على الإطلاق: لا تزال مهمة معالجة الأشياء (التي يجب أخذها وإعادة توجيهها وتعيينها) صعبة للغاية. على عكس المتلاعبين الصناعيين ، الذين يتواجدون بشكل ثابت في العادة ، وتحركت جميع الإحداثيات ، والتي تعمل في ظل ظروف مثالية ، كل شيء أكثر برودة: أضع الروبوت على الحقل ، وسحب المفتاح ويعمل الروبوت حتى ينتهي السباق. احتمال وجود نوع من التعديل الإحداثي والتصحيح الإضافي غائب عمليا. من الضروري الأخذ في الاعتبار أخطاء الترجمة الخطيرة المحتملة أو عدم الدقة في تصنيع الحقل (على سبيل المثال ، يعتقد الروبوت أنه يواجه عفريتًا يعتزم أخذها ، ولكن في الواقع يتم تعويض x 15 مم من الإحداثيات المطلوبة) ، لذلك ضع المعالج في قبضة أنيقة ، لن ينجح الانتقال من نقطة إلى نقطة: في ظل ظروف المنافسة الحقيقية ، ستواجه مشكلات خطيرة.
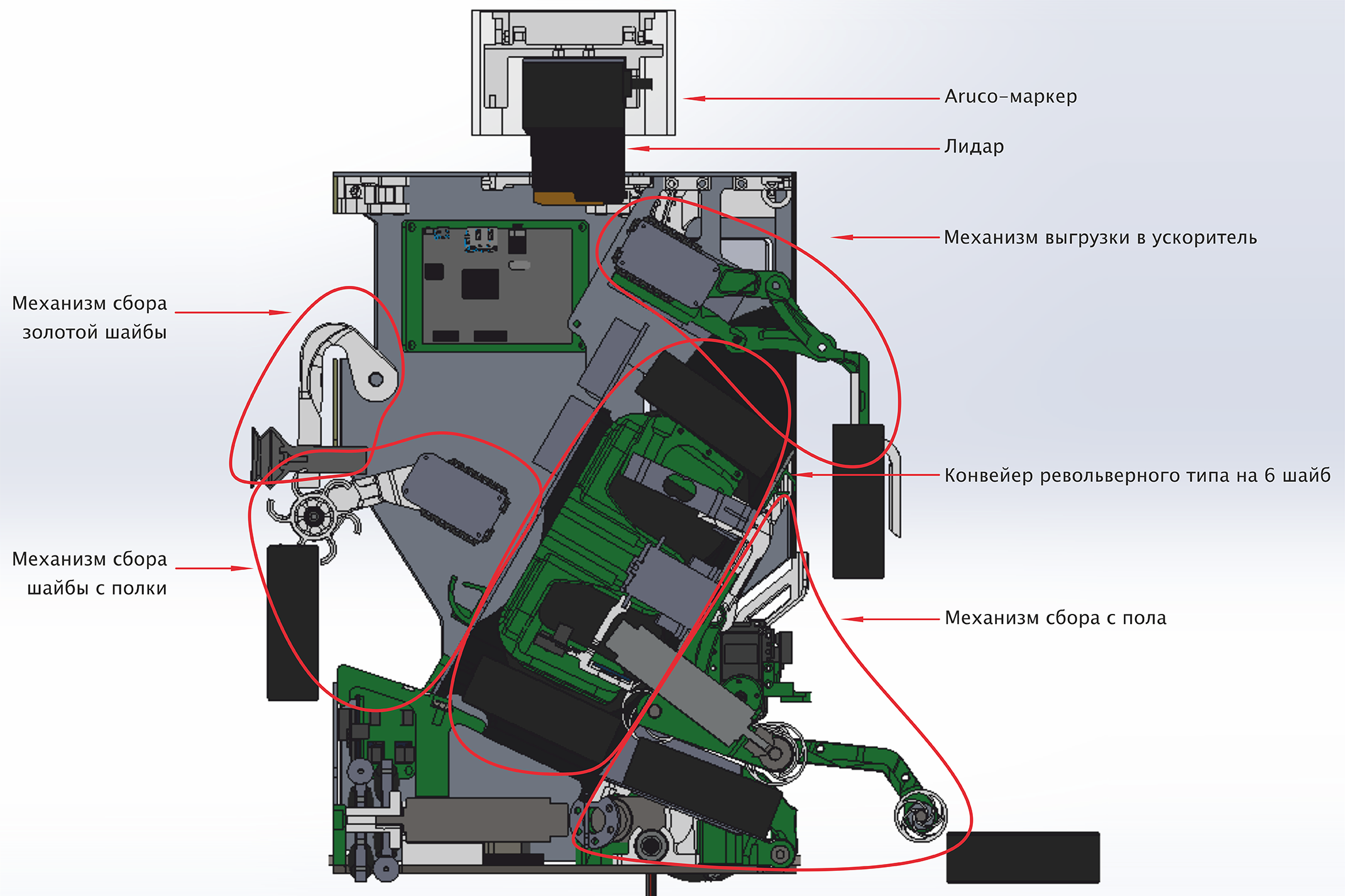 ترتيب الآليات في الروبوت.
ترتيب الآليات في الروبوت.لقد نجحنا في إنشاء روبوتين متطابقين ، حل كل منهما مجموعة كاملة من المهام الممكنة في إطار المنافسة. كان الروبوت يضم ناقلًا من النوع الدوار مع 6 غسالات ، وفي أي وقت يمكننا تفريغ أي منها. في الحقل ، توجد الغسالات في موقعين: الاستلقاء على الأرض والوقوف على رف خاص. لكل خيار وقد تم تصميم آلية جمع الخاصة بها. تم تجميع الغسالات من الرف باستخدام أسطوانة رفرف خاصة ألقت الغسالات على المنحدر ، على طول المنحدر ، انتقلت الغسالة إلى الخلية السفلى من المسدس ، وبعد ذلك تم اكتشاف لونها ، وتمرير المسدس ، وسحب الروبوت إلى الغسالة التالية.
يتكون الإطار الداعم للروبوت من الألومنيوم المصنوع من الألواح و 204 أجزاء مطبوعة و 6 وحدات من Dynamixel AX-12A وواحد Dynamixel MX-64 واثنين من تسعة غرامات و 3 قطع من maxonmotor 16mm و maxonmotor 22mm هي المسؤولة عن هذه الآليات. كان هيكل السيارة من ثلاثة أعمدة 22 ملم و
60 ملم . كل هذا محنك مع 106 محامل.
لماذا dynamixels وليس الماكينات القياسية؟ لديهم العديد من وسائل الحماية والتحكم الرقمي والعديد من الإعدادات ، والاتصال التسلسلي مريحة وذات نوعية جيدة عموما. تُظهر تجربتنا أيضًا أن الماكينات الرخيصة لكل موسم تتغير في دائرة عدة مرات ، في حين تكلف الماكينات المكلفة تقريبًا نفس المبلغ.

نظرًا لأن معظم الغسالات الموجودة على الأرض لم تكن في إحداثيات محددة ، ولكن كانت موجودة بشكل عشوائي داخل منطقة معينة ، كان من الصعب استخدام المتلاعبين ، لذلك تم تطوير آلية خاصة لامتصاص الغسالات.
يتم تفريغ الغسالات في منطقتين: على الموازين ، حيث يمكن أن تقع الغسالات في أي وضع ، وفي منطقة التسريع ، حيث يتم وضع الغسالات في وضع عمودي. هنا يقوم الروبوت بشكل مثالي بتفريغ كل شيء في المعجل في الحقل الرئيسي (والذي كان 90٪ من الحالات):
ومع ذلك ، في السباقات الحاسمة ، وهذا ، لسوء الحظ ، عملت من خلال مرة واحدة.
عند التفريغ في المسرع ، من الممكن التخلص من الغسالات فورًا على سطح مائل ، وإسقاطها أولاً على سطح أفقي ، ثم دفعها إلى سطح مائل. الخيار الثاني يتيح لك رمي هدفين آخرين وتسجيل المزيد من النقاط. لذلك ، تم اختيار هذا الخيار ، والذي ، كما اتضح فيما بعد ، كان خطأ فادحًا. كان من الصعب للغاية القيادة إلى الحائط ورمي الصولجان والتخلص من الأسطوانة وتكرارها مرات عديدة. يمكن للغسالات الوقوف بشكل ملتوي ، لا تسريع ، تصطدم بالحائط ، والأهم من ذلك ، منع مرور الغسالات اللاحقة.
كما يتضح من تجربة المسابقات ، وعلى الأخص القرارات البناءة للفرق الأخرى ، كلما كانت القرارات في الميكانيكا أكثر بساطة ، كان ذلك أفضل. يتطلب الحل الحالي العمل المنسق والمصحح لعدد كبير من الآليات المعقدة ، وقد أدى فشل أي منها إلى عطل في النظام بأكمله ، وهذا ، كما هو معروف
من نظرية الموثوقية ، ليس رائعًا. أيضًا ، تطلبت الميكانيكا تعديلًا منتظمًا وإصلاحات بسيطة ، مما أوقف عملية تصحيح البرامج على الروبوت. حيث يكون من الأفضل عمل روبوت به كوب شفط واحد على ذراع وصلة واحدة ، مما يضع الغسالات في كومة ، لكنه يفي بمئات الحالات على النحو المراد. من ناحية أخرى ، يمكن اعتبار المشاركة في المسابقات ليس فقط مسابقات تسجيل نتائج ، بل طريقة جيدة لتنفيذ الحلول الهندسية الأكثر إثارة للاهتمام والرائعة.
بشكل عام ، على الرغم من الأداء غير الناجح في فرنسا ، إلا أننا سعداء بالنتائج. لقد تعلمنا الكثير من الدروس: أن حالة استعداد المهمة ليست معلمة ثنائية ، وأن سرعة التطوير غالباً ما تتناسب عكسياً مع عدد الأشخاص المعنيين ، ويمكن أن تكون بسيطة ومتخصصة في آليات ووحدات مهمة صغيرة أفضل من الأفكار المعقدة ، ومن الناحية النظرية. والاستعداد للموسم الجديد.
روابط الفيديو ومراجعة أكثر تعمقًا:
صفحة القواعد الرسمية لـ Eurobot .
مراجعة مفصلة من الموجهين الفريق .
ليس Eurobot هو الشيء الوحيد الذي يمكن أن يفعله المتدربون في مختبر Sberbank Robotics Laboratory ؛ فهناك دورات تدريبية أخرى ، على سبيل المثال ، في التعامل الفكري مع الأشياء ، والروبوتات المتنقلة ، والروبوتات المجسمة على منصة iCub. ويمكنك إجراء بحث مشترك أو كتابة دبلوم أو درجة الماجستير (إذا كان هذا يتقاطع مع موضوع المختبر). أرسل سيرتك الذاتية والتطبيق في شكل حر إلى robotics@sberbank.ru
برقية لدينا:
t.me/SetUpSber