Google hat im Mai einen Bericht über das Testen von Robomobilen veröffentlicht
Ein kleiner PDF- Bericht eines Teams von Ingenieuren, die an einem Roboterautoprojekt arbeiten, wurde auf der Website des Google Self-Driving Car-Projekts veröffentlicht . Anscheinend werden solche Dokumente monatlich veröffentlicht. Trotz der Tatsache, dass der aktuelle Bericht nur wenige Seiten enthält, beschreibt er detailliert Straßenvorfälle, bei denen es in den letzten sechs Jahren seit Beginn des Testens von Roboterautos des Suchriesen gelungen ist, darauf zuzugreifen.Zunächst stellt Google die Zahlen klar: 23 Lexus RX450h-SUVs, die auf kalifornischen Straßen fahren, hauptsächlich in Mountain View, nehmen an dem Programm teil. Darüber hinaus gibt es 9 weitere Prototypen auf geschlossenen Deponien. Seit 2009 haben Robomobile im Robotermodus 1.627.591 Kilometer zurückgelegt (dies bedeutet, dass sie nur per Software gesteuert werden und der Fahrer des Lenkrads im Auto nicht berührt). Im Durchschnitt einer Woche legten Robocars 16.000 km auf offener Straße zurück.Sechs Jahre lang ereigneten sich 12 Unfälle mit Robomobilen, die alle auf die Schuld von Personen zurückzuführen waren. Der nächste Mai-Unfall ereignete sich mit Lexus, als er an der Kreuzung in Mountain View an einer roten Ampel anhielt. Zu diesem Zeitpunkt zerknitterte eine Art von Menschen angetriebenes Auto die hintere Stoßstange des Lexus und beschädigte so die Sensoren daran. Die Geschwindigkeit des Täters betrug zu diesem Zeitpunkt nur etwa 1,5 km / h, so dass der Unfall ohne ernsthaften Schaden endete.Es ist interessant zu bewerten, auf welche schwierigen Verkehrssituationen die Robocars stoßen und wie sie es geschafft haben, aus ihnen herauszukommen: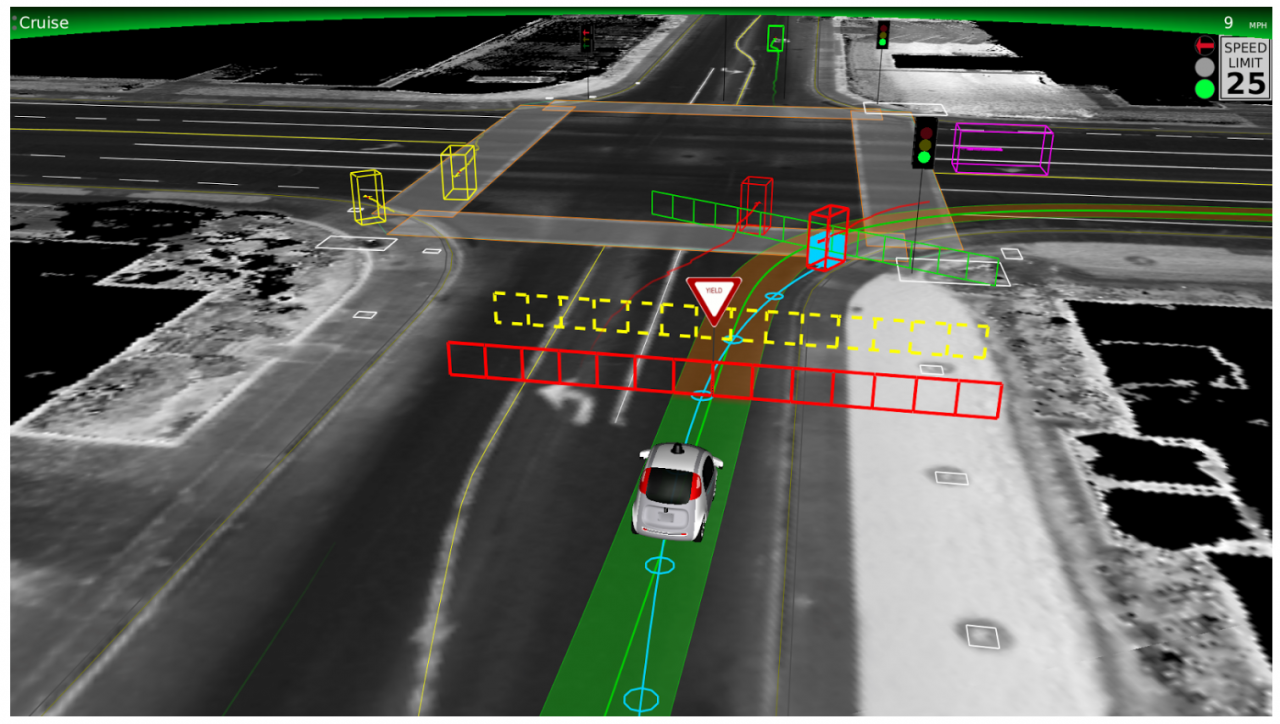 Das obige Diagramm zeigt den Bewegungsplan eines Robocars an der Kreuzung und zweier Motorradfahrer, die durch rote Parallelepipeds gekennzeichnet sind (eine unterbrochene rote Linie ist die Art und Weise, wie sie sich bewegen). Robokar hielt an der Kreuzung an. Zu diesem Zeitpunkt passierte der Motorradfahrer die Kreuzung relativ erfolgreich und fuhr weiter. Aber das Motorrad, das aus einem unbekannten Grund nach rechts in Richtung Robocar abbog, fuhr in den Gegenverkehr, so dass es sich direkt auf dem Weg des Google-Autos befand - seine berechnete Flugbahn wird durch eine blaue Linie angezeigt. Die Autosoftware entschied sich anzuhalten und nicht vorwärts zu fahren, damit das Motorrad eine Kollision direkt an der Kreuzung vermeiden konnte. Infolgedessen haben sich Robocar und Motorrad sicher verfehlt, um Probleme bei einem Unfall zu vermeiden. Die zusätzliche Schwierigkeit war, dass alles im Dunkeln passierte,und es wäre für einen menschlichen Fahrer schwierig, eine korrekte Einschätzung der Situation abzugeben.
Das obige Diagramm zeigt den Bewegungsplan eines Robocars an der Kreuzung und zweier Motorradfahrer, die durch rote Parallelepipeds gekennzeichnet sind (eine unterbrochene rote Linie ist die Art und Weise, wie sie sich bewegen). Robokar hielt an der Kreuzung an. Zu diesem Zeitpunkt passierte der Motorradfahrer die Kreuzung relativ erfolgreich und fuhr weiter. Aber das Motorrad, das aus einem unbekannten Grund nach rechts in Richtung Robocar abbog, fuhr in den Gegenverkehr, so dass es sich direkt auf dem Weg des Google-Autos befand - seine berechnete Flugbahn wird durch eine blaue Linie angezeigt. Die Autosoftware entschied sich anzuhalten und nicht vorwärts zu fahren, damit das Motorrad eine Kollision direkt an der Kreuzung vermeiden konnte. Infolgedessen haben sich Robocar und Motorrad sicher verfehlt, um Probleme bei einem Unfall zu vermeiden. Die zusätzliche Schwierigkeit war, dass alles im Dunkeln passierte,und es wäre für einen menschlichen Fahrer schwierig, eine korrekte Einschätzung der Situation abzugeben. Source: https://habr.com/ru/post/de380391/
All Articles