Wie DRC-HUBO aus Südkorea die DARPA Robotics Challenge gewinnt
 Am Samstag, das koreanische Leading Science and Technology Institute (KAIST) gewann Team aus Südkorea der DARPA Robotics Challenge (DRC) in Pomona, Kalifornien, wenn ihre Roboter, der anpassungsfähige humanoide DRC-HUBO , 22 andere Roboter aus fünf verschiedenen Ländern besiegt und gewann den Hauptgeldpreis von 2 Millionen Dollar.
Am Samstag, das koreanische Leading Science and Technology Institute (KAIST) gewann Team aus Südkorea der DARPA Robotics Challenge (DRC) in Pomona, Kalifornien, wenn ihre Roboter, der anpassungsfähige humanoide DRC-HUBO , 22 andere Roboter aus fünf verschiedenen Ländern besiegt und gewann den Hauptgeldpreis von 2 Millionen Dollar. Die Fähigkeit, sich von einem zweibeinigen Laufroboter in ein Auto auf Rädern zu verwandeln, spielte eine wichtige Rolle bei der Auszeichnung. Viele Roboter verloren das Gleichgewicht und fielen zu Boden, öffneten die Tür oder arbeiteten mit einem Bohrer. Aber nicht DRC-HUBO . Das einzigartige Design ermöglichte es ihm, Aufgaben schneller zu erledigen und vor allem auf seinen Füßen (und Rädern) zu bleiben.
Die Fähigkeit, sich von einem zweibeinigen Laufroboter in ein Auto auf Rädern zu verwandeln, spielte eine wichtige Rolle bei der Auszeichnung. Viele Roboter verloren das Gleichgewicht und fielen zu Boden, öffneten die Tür oder arbeiteten mit einem Bohrer. Aber nicht DRC-HUBO . Das einzigartige Design ermöglichte es ihm, Aufgaben schneller zu erledigen und vor allem auf seinen Füßen (und Rädern) zu bleiben.Die zweibeinige Bewegung [für Roboter] ist noch nicht stabil genug “, sagte Rong Ho O, Professor für Maschinenbau am führenden wissenschaftlichen und technischen Institut Koreas, Teamleiter KAIST. - Wenn einer von ihnen nicht richtig funktioniert, kann das Ergebnis katastrophal sein.
 Er sagte, dass ein humanoider Roboter Vorteile hat, wenn er in einer Gesellschaft von Menschen arbeitet, aber er wollte ein Design entwickeln, das das Sturzrisiko minimiert: „Ich habe über viele Dinge nachgedacht, und das Einfachste waren Räder auf meinen Knien.“DRC-HUBO kann die Haltung ändern, auf zwei Beinen stehen, gehen, nach hohen Gegenständen greifen und sich auf den Knien in einer stabileren Position bewegen.DARPA beschloss, die Demokratische Republik Kongo nach dem Vorfall in Fukushima in Japan zu organisieren , in der Hoffnung, auf dem Gebiet der Robotik voranzukommen. Zum DRC Finale WettbewerbTeams, die halbautonome Roboter entwickelten, wurden eingeladen, und menschliche Bediener mussten zusammenarbeiten, um die Bedingungen der Katastrophe zu modellieren. Roboter, die von Universitäten und Unternehmen für den Wettbewerb entwickelt wurden, waren in Größe und Form sehr unterschiedlich. Darunter befinden sich Roboter mit Beinen, Rädern und Hybriden.
Er sagte, dass ein humanoider Roboter Vorteile hat, wenn er in einer Gesellschaft von Menschen arbeitet, aber er wollte ein Design entwickeln, das das Sturzrisiko minimiert: „Ich habe über viele Dinge nachgedacht, und das Einfachste waren Räder auf meinen Knien.“DRC-HUBO kann die Haltung ändern, auf zwei Beinen stehen, gehen, nach hohen Gegenständen greifen und sich auf den Knien in einer stabileren Position bewegen.DARPA beschloss, die Demokratische Republik Kongo nach dem Vorfall in Fukushima in Japan zu organisieren , in der Hoffnung, auf dem Gebiet der Robotik voranzukommen. Zum DRC Finale WettbewerbTeams, die halbautonome Roboter entwickelten, wurden eingeladen, und menschliche Bediener mussten zusammenarbeiten, um die Bedingungen der Katastrophe zu modellieren. Roboter, die von Universitäten und Unternehmen für den Wettbewerb entwickelt wurden, waren in Größe und Form sehr unterschiedlich. Darunter befinden sich Roboter mit Beinen, Rädern und Hybriden.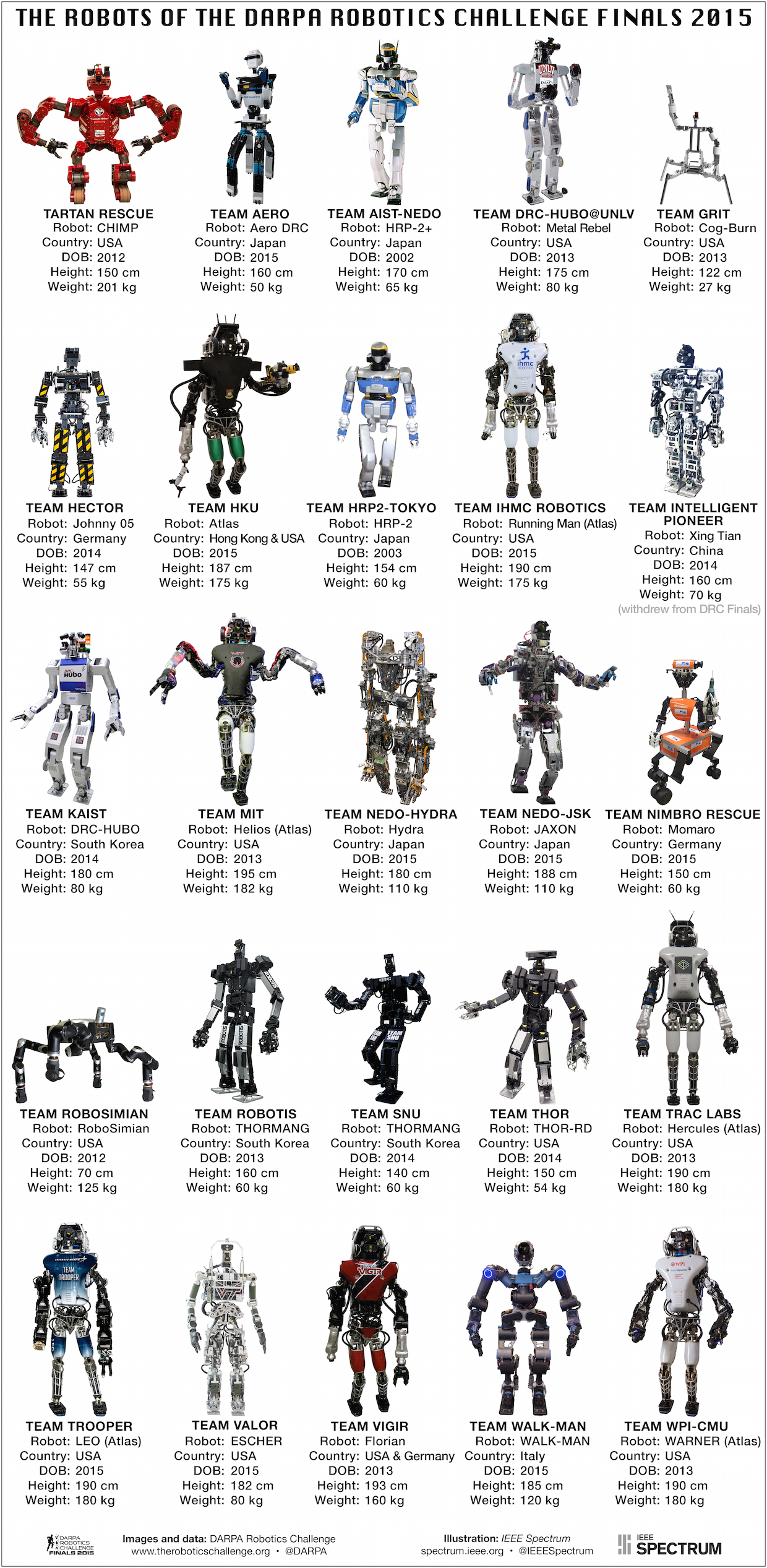 DRC-HUBO wurde ein Gewinner, weil es alle acht Aufgaben in kürzester Zeit (44 Min. 28 s) fehlerfrei erledigen konnte. Andere Teams zeigten ebenfalls gute Leistungen, aber ihre Roboter verloren aufgrund von Verzögerungen Zeit. Zu den besten gehört das Tartan Rescue- Team . Sein CHIMP ist ein Roboter mit Beinen und Raupenketten, der nach dem Sturz wieder zu Aufgaben zurückkehren konnte. Momarovom Team der Universität Bonn - ein einfaches und elegantes Auto auf Rädern mit drehbarem Kopf und zwei Händen; RoboSimian vom Jet Propulsion Laboratory der NASA mit vier Beinen und Yoga-ähnlichen Bewegungen; ATLAS vom IHMC- Team ist ein großer elektrischer humanoider Roboter, der von Boston Dynamics entwickelt wurde .
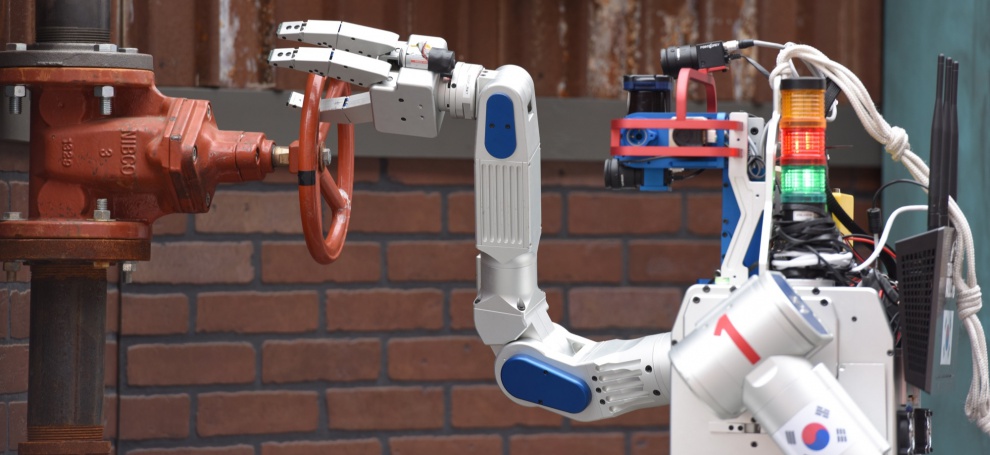
DRC-HUBO wurde ein Gewinner, weil es alle acht Aufgaben in kürzester Zeit (44 Min. 28 s) fehlerfrei erledigen konnte. Andere Teams zeigten ebenfalls gute Leistungen, aber ihre Roboter verloren aufgrund von Verzögerungen Zeit. Zu den besten gehört das Tartan Rescue- Team . Sein CHIMP ist ein Roboter mit Beinen und Raupenketten, der nach dem Sturz wieder zu Aufgaben zurückkehren konnte. Momarovom Team der Universität Bonn - ein einfaches und elegantes Auto auf Rädern mit drehbarem Kopf und zwei Händen; RoboSimian vom Jet Propulsion Laboratory der NASA mit vier Beinen und Yoga-ähnlichen Bewegungen; ATLAS vom IHMC- Team ist ein großer elektrischer humanoider Roboter, der von Boston Dynamics entwickelt wurde .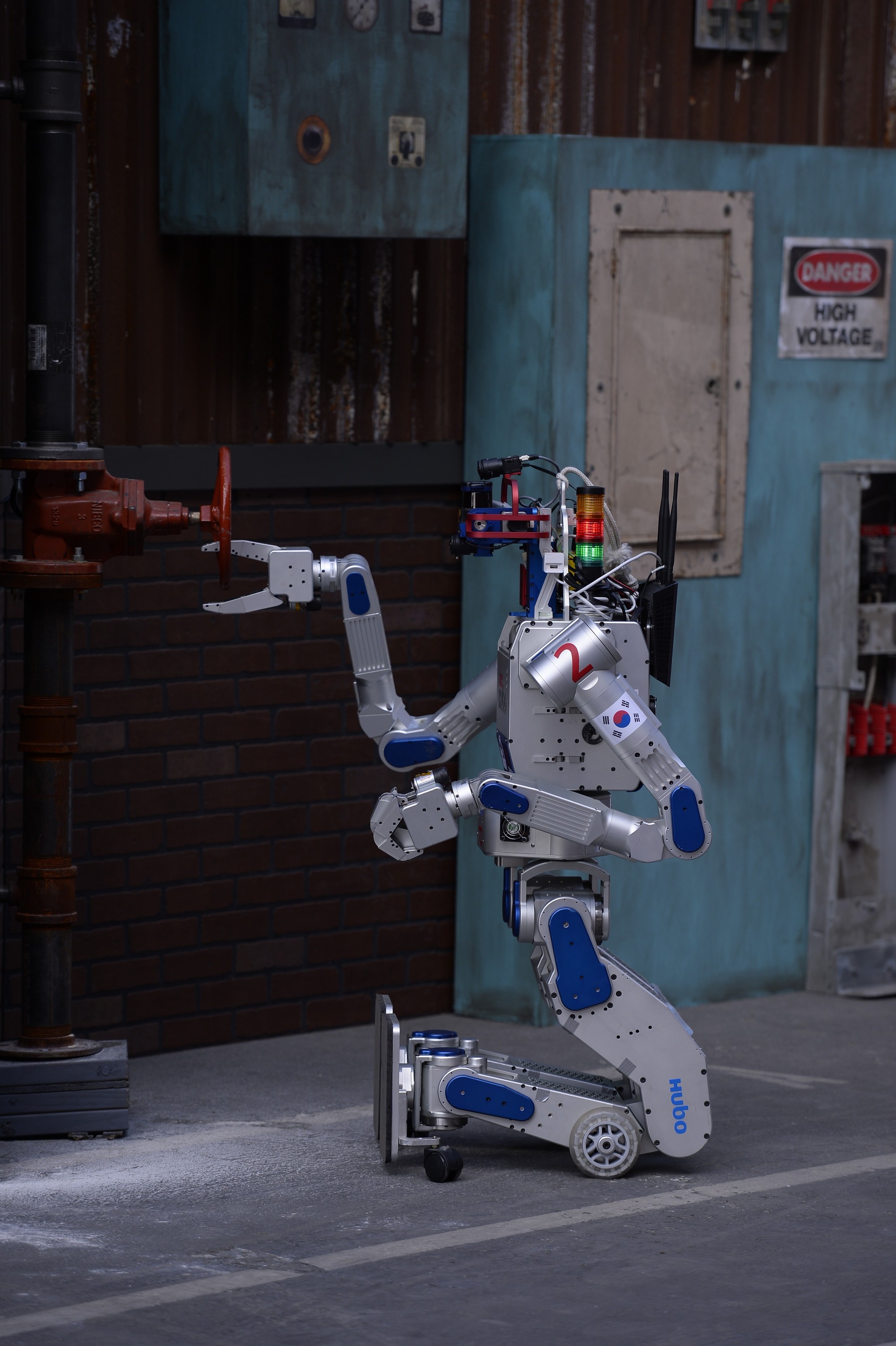 DRC-HUBO übernimmt das Schließen des Ventils. Beachten Sie, dass sein Oberkörper um 180 Grad gedreht ist.
DRC-HUBO übernimmt das Schließen des Ventils. Beachten Sie, dass sein Oberkörper um 180 Grad gedreht ist.Flexibilität ist das Wichtigste, sagte die DARPA-Managerin und DRC-Organisatorin Jill Pratt bei einem Treffen mit Reportern, die das Design der Roboter kommentierten. "Ein Roboter, der die Konfiguration von der Verwendung von Beinen zur Verwendung von Rädern ändern kann, kann eine komplexere Struktur und ein höheres Gewicht aufweisen, bietet Ihnen jedoch diese Flexibilität."
Professor O ist ein international anerkannter Experte für humanoide Roboter. Er und seine KAIST- Studenten in Daejeon, Südkorea, verbessern seit Generationen ihre HUBO-Plattform. Unten ist ein Video, das bereits mehrere Jahre alt ist: Dann demonstrierte Professor O HUBO 2:Für das DRC-Finale entschied er sich, den Roboter erheblich zu modifizieren, um ihn auf mögliche Aufgaben vorzubereiten. In der Meisterklasse nach dem Wettbewerb sagte Professor O, dass der DRC-HUBO "nicht anders ist, es ist nur ein humanoider Roboter." Tatsächlich hat sein Team von KAIST jedes Detail sorgfältig ausgearbeitet. Er schätzte die Kosten für jeden Roboter auf ungefähr 500.000 USD und 1 Million USD. Nachfolgend sind die Hauptmerkmale aufgeführt, die DRC-HUBO bei der Bewältigung von Aufgaben halfen :1. Räder auf den Knien: DRC-HUBOhat Räder an beiden Knien und Rollen an den Beinen. Mit Rädern kann sich der Roboter schnell und gleichmäßig bewegen. Er bewegt sich auf dem Boden und misst mit optischen Sensoren am Schienbein die Entfernung mithilfe des optischen Flusses. 2. Leistungsstarke Motoren: Genau wie SCHAFT - der Roboter, der den DARPA- Vorwettbewerb gewonnen und von Google erworben hat , verfügt DRC-HUBO über sehr leistungsstarke Motoren (33 davon mit 31 Grad Bewegungsfreiheit). Dank spezieller Motoren und eines Luftkühlsystems (Lüfter und Schaufeln) kann der Roboter eine 3-4-mal höhere Spannung als in der Motorspezifikation angegeben verwenden, mit einem Maximalwert von 30 Ampere in einigen Fällen.3. Kompatibilität: Das Team wollte den Roboter ohne Verwendung von Drehmomentsensoren und der üblichen automatischen Steuerung kompatibel machen (sie befürchteten, dass dies zu Instabilität führen würde). Daher wurde unter Verwendung eines speziellen Verstärkers das Kompatibilitätsproblem auf den Motortreiber übertragen.
2. Leistungsstarke Motoren: Genau wie SCHAFT - der Roboter, der den DARPA- Vorwettbewerb gewonnen und von Google erworben hat , verfügt DRC-HUBO über sehr leistungsstarke Motoren (33 davon mit 31 Grad Bewegungsfreiheit). Dank spezieller Motoren und eines Luftkühlsystems (Lüfter und Schaufeln) kann der Roboter eine 3-4-mal höhere Spannung als in der Motorspezifikation angegeben verwenden, mit einem Maximalwert von 30 Ampere in einigen Fällen.3. Kompatibilität: Das Team wollte den Roboter ohne Verwendung von Drehmomentsensoren und der üblichen automatischen Steuerung kompatibel machen (sie befürchteten, dass dies zu Instabilität führen würde). Daher wurde unter Verwendung eines speziellen Verstärkers das Kompatibilitätsproblem auf den Motortreiber übertragen.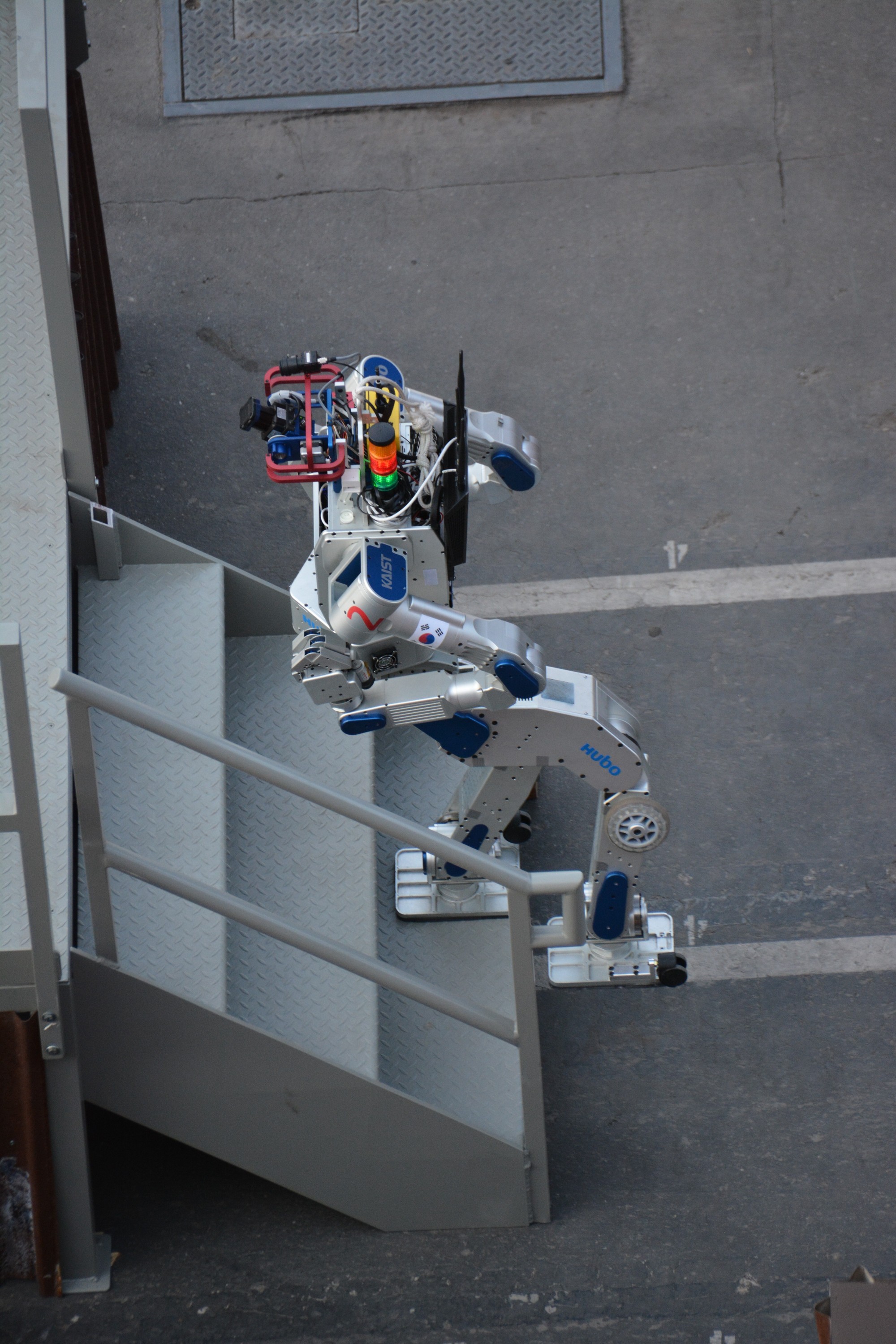 4. Rotierender Oberkörper: DRC-HUBO kann seinen Oberkörper um 180 Grad drehen. Dies bedeutet, dass die Knie des Roboters in eine Richtung gedreht werden können, während er in die entgegengesetzte Richtung schauen kann (probieren Sie es selbst aus!). Diese Fähigkeit funktioniert nicht nur im Stehen, sondern auch auf den Knien. Der Roboter nutzte diese Gelegenheit bei mehreren Aufgaben, wenn es notwendig war: ein Fahrzeug zu fahren, eine Wand zu perforieren, sich durch die Trümmer zu bewegen und Treppen zu steigen.5. Lange Arme: Die Mitglieder des KAIST- Teams stellten fest, dass die HUBO 2- Arme für einige Aufgaben zu kurz waren, und machten daher längere Arme mit einer Drehung um 7 Grad. Sie versteckten auch alle Kabel nach innen, damit sie nicht an umgebenden Objekten haften. Jede Hand kann ein Gewicht von bis zu 15 kg tragen und verfügt über einen „anpassungsfähigen Greifer“, der harte und weiche Gegenstände greifen kann.
4. Rotierender Oberkörper: DRC-HUBO kann seinen Oberkörper um 180 Grad drehen. Dies bedeutet, dass die Knie des Roboters in eine Richtung gedreht werden können, während er in die entgegengesetzte Richtung schauen kann (probieren Sie es selbst aus!). Diese Fähigkeit funktioniert nicht nur im Stehen, sondern auch auf den Knien. Der Roboter nutzte diese Gelegenheit bei mehreren Aufgaben, wenn es notwendig war: ein Fahrzeug zu fahren, eine Wand zu perforieren, sich durch die Trümmer zu bewegen und Treppen zu steigen.5. Lange Arme: Die Mitglieder des KAIST- Teams stellten fest, dass die HUBO 2- Arme für einige Aufgaben zu kurz waren, und machten daher längere Arme mit einer Drehung um 7 Grad. Sie versteckten auch alle Kabel nach innen, damit sie nicht an umgebenden Objekten haften. Jede Hand kann ein Gewicht von bis zu 15 kg tragen und verfügt über einen „anpassungsfähigen Greifer“, der harte und weiche Gegenstände greifen kann.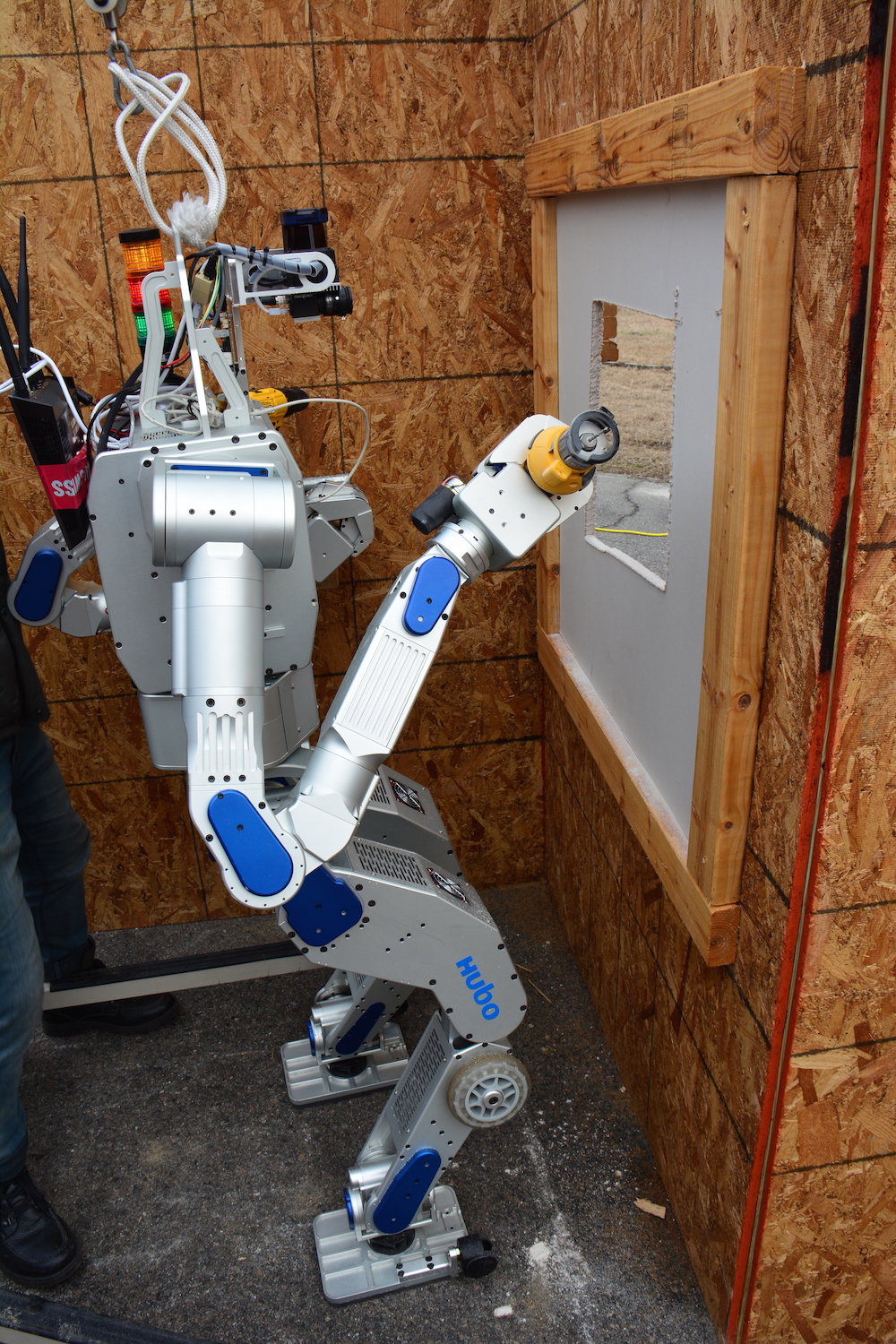 6. Vereinfachtes Klingen: Anstatt den Kopf mit Sensoren, stereoskopischen Kameras und Lidars zu füllen, die ständig die Umgebung scannen (diese Technologie verwendet beispielsweise den ATLAS- Roboter ), DRC-HUBOhat ein vereinfachtes Bildverarbeitungssystem; Die Bediener verlassen sich die meiste Zeit auf eine herkömmliche Kamera, und ein an ein Servoantrieb angeschlossenes Lidar scannt die Umgebung nur bei Bedarf. Tatsächlich hat der Roboter keinen Kopf - "nur Augen", bemerkte einer der KAIST- Studenten .7. Leistung: Wenn Motoren eine hohe Leistung benötigen, kann das Hauptantriebssystem möglicherweise nicht genügend Energie für die wichtigen Komponenten der Maschine bereitstellen. Um dies zu vermeiden, verwendete das Team einen Superkondensator, der Computer, Übertragungskanäle sowie einige Sensoren und Gyroskope mit Energie versorgt, selbst wenn das Hauptstromversorgungssystem ausfällt.8. Spezielle Software: Das Team verwendet Xenomai-Echtzeitbetriebssystem für Linux und ein spezielles Motion Control-Framework namens PODO (entwickelt von KAIST ). Sie nutzen auch die Gazebo-Simulationsumgebung. Das Team entwickelte seine Software mit dem Schwerpunkt auf geringer Bandbreite und instabiler Kommunikation zwischen Bedienern und Roboter.
6. Vereinfachtes Klingen: Anstatt den Kopf mit Sensoren, stereoskopischen Kameras und Lidars zu füllen, die ständig die Umgebung scannen (diese Technologie verwendet beispielsweise den ATLAS- Roboter ), DRC-HUBOhat ein vereinfachtes Bildverarbeitungssystem; Die Bediener verlassen sich die meiste Zeit auf eine herkömmliche Kamera, und ein an ein Servoantrieb angeschlossenes Lidar scannt die Umgebung nur bei Bedarf. Tatsächlich hat der Roboter keinen Kopf - "nur Augen", bemerkte einer der KAIST- Studenten .7. Leistung: Wenn Motoren eine hohe Leistung benötigen, kann das Hauptantriebssystem möglicherweise nicht genügend Energie für die wichtigen Komponenten der Maschine bereitstellen. Um dies zu vermeiden, verwendete das Team einen Superkondensator, der Computer, Übertragungskanäle sowie einige Sensoren und Gyroskope mit Energie versorgt, selbst wenn das Hauptstromversorgungssystem ausfällt.8. Spezielle Software: Das Team verwendet Xenomai-Echtzeitbetriebssystem für Linux und ein spezielles Motion Control-Framework namens PODO (entwickelt von KAIST ). Sie nutzen auch die Gazebo-Simulationsumgebung. Das Team entwickelte seine Software mit dem Schwerpunkt auf geringer Bandbreite und instabiler Kommunikation zwischen Bedienern und Roboter. Schauen wir uns nun DRC-HUBO genauer an und wie es alle acht Aufgaben durchlaufen hat, die dem KAIST- Team den Sieg gebracht haben (wenn Sie alles vollständig sehen möchten, können Sie dies anhand einer Referenz tun; eine beschleunigte Version finden Sie hier):
Schauen wir uns nun DRC-HUBO genauer an und wie es alle acht Aufgaben durchlaufen hat, die dem KAIST- Team den Sieg gebracht haben (wenn Sie alles vollständig sehen möchten, können Sie dies anhand einer Referenz tun; eine beschleunigte Version finden Sie hier):1. Die Aufgabe des Fahrens.
Die Teams durften Änderungen am Polaris- Fahrzeug vornehmen, damit ihre Roboter problemlos in das Auto hinein- und aus ihm herausfahren konnten. Das KAIST- Team installierte eine Metallvorrichtung mit zwei Hebeln am Boden des Autos. Als der DRC-HUBO einen der Hebel drückte, arbeitete das Kabelsystem so, dass der zweite Hebel das Gaspedal drückte. Mit der linken Hand hielt der Roboter das Auto fest und mit der rechten Hand steuerte er das Rad. Er erledigte diese Aufgabe sehr schnell (der Vorgang dauerte etwas mehr als eine Minute) und hörte im Gegensatz zu anderen Teams nicht auf, Hindernisse zu überwinden.2. Die Aufgabe, das Fahrzeug zu verlassen.
Dies war eine der schwierigsten Aufgaben. Als er sich auf ihn vorbereitete, stieg Professor Oh, wie er uns sagte, mehrmals aus dem Auto, um zu verstehen, welche Bewegungen und Körperteile er dafür verwendet. Er kam zu dem Schluss, dass ein „dynamischer Ansatz“ erforderlich wäre. Sein Team programmierte den DRC-HUBO so, dass er die Hände hob und sich am Rahmen der Maschine festhielt. Der Roboter verwendet 100 Newton Traktion für jede Hand. Wenn die Arme den Körper des Roboters anheben, fällt er im Großen und Ganzen aus dem Auto, obwohl die Bewegung gesteuert wird (dank des „dynamischen Ansatzes“). Achten Sie auf sein wunderbares Manöver, um gegen 1:00 Uhr aus dem Auto zu steigen! Professor O berichtete, dass während der Entwicklung dieses Uhrwerks mehrere Motoren durchgebrannt waren, das Problem jedoch mit den leistungsstärksten, speziell gefertigten Motoren gelöst wurde. Im Moment kann der Roboter in weniger als 4 Minuten aus dem Auto aussteigen, und wenn er bereits am Boden ist, sitzt er auf den Knien und geht.3. Die Mission mit der Tür.
Im Gegensatz zu anderen Robotern, die stehen mussten (und auf zwei Beinen balancieren mussten), um diese Aufgabe zu erfüllen, konnte der DRC-HUBO durch Drehen des Türgriffs knien. Er benutzt geschickt seine andere Hand, um die Tür offen zu halten, während er den Türknauf dreht. In weniger als 2 Minuten fuhr er durch eine Tür.4. Die Aufgabe mit dem Ventil.
Beachten Sie, dass sich der Lidar zu Beginn des Videos auf und ab bewegt, damit der Bediener das Gelände vor dem Roboter scannen kann. Wenn sich der DRC-HUBO dem Absperrschieber nähert, dreht er den Oberkörper um 180 Grad. Achten Sie auf die Bewegung um 0:20 Uhr, da Sie dies möglicherweise nicht bemerken (der Schusswinkel zeigt leider nicht den unteren Teil des Roboterkörpers an). In dieser Position, immer noch auf den Knien, kann der Roboter den Körper anheben, damit das Ventil leichter gesteuert werden kann (warum stehen, wenn es nicht erforderlich ist?). Der Roboter scannt das Gelände mit dem Lidar, ermittelt die Position und führt nach 3 Minuten die Aufgabe aus. Bitte beachten Sie, dass nur eine Runde erforderlich war, aber DRC-HUBOmachte zwei komplette Runden! Um 2:01 Uhr können Sie sehen, wie der Roboter den Oberkörper in seine normale Position zurückbringt.5. Die Aufgabe mit der Wand.
Dies war für die meisten Teams eine schwierige Aufgabe, da der Roboter den Bohrer halten und den Ein- / Ausschalter drücken musste, um das Gerät zu verwenden. DRC-HUBO verwendete Kraftsensoren an jedem Arm, um das Instrument besser erfassen zu können. Sie können sehen, wie sich der Roboter von selbst bewegt und sogar den Bohrer im Regal bewegt (indem Sie unterwegs einen anderen Bohrer umwerfen), um ihn besser zu erfassen. Wenn es dem Roboter gelingt, das Werkzeug zu greifen, zeigen die Bediener den Ort für die Perforation an, und der Roboter erledigt den Rest. Er verwendet 20 Newton Krafttraktion, und Sie können sehen, wie er seinen Körper verwendet, um den Bohrer perfekt in einem Kreis zu bewegen. Das Ausführen der Aufgabe dauert 11 Minuten.6. Der Überraschungsjob.
Die Aufgabe bestand darin, den Stecker herauszuziehen und in eine andere Steckdose zu stecken. Beachten Sie, wie DRC-HUBO den Boden scannt und feststellt, dass sich der zuvor abgelegte Bohrer auf seinem Weg befindet. Der Roboter dreht sich und drückt das Instrument mit den Knien. Dann versucht er sich umzudrehen und scheint gegen eine Wand zu krachen. Die Bediener bemerken das Problem offensichtlich, er geht ein wenig voran und kann sich dann umdrehen. Am Ende nähert sich der Roboter der Wand mit einer Steckdose, die höher als der Absperrschieber und der Türgriff installiert ist. Es ist Zeit, auf die Beine zu kommen, und Sie können es gegen 3:05 Uhr sehen. DRC-HUBOmacht mehrere Schritte vorwärts und beginnt nach einer Weile, die Aufgabe abzuschließen. Er packt den Stecker am Kabel; Wir glauben, dass dies beabsichtigt war, damit die Bediener den Stecker besser sehen konnten und der Roboterarm ihn nicht verdeckte, was die Aufgabe unmöglich machen würde. Mit der Zeit können Sie dies gegen 7:47 Uhr sehen, wenn der Roboter versucht, den Stecker einzustecken und die Steckdose verfehlt. Nach mehreren Korrekturbewegungen ist die Aufgabe erledigt! 13 Minuten und 30 Sekunden vergingen - mehr als alle anderen Aufgaben zu erledigen.7. Die Aufgabe, sich durch die Trümmer zu bewegen.
Der DRC-HUBO kann seine Knie nach vorne bewegen oder den Oberkörper um 180 Grad drehen und seine Beine nach vorne fahren, wobei er sich wie ein Bulldozer-Eimer verhält. Und das tut er, um die Aufgabe zu erfüllen. Sie können sehen, wie er den Körper um 0:28 dreht. Das sieht cool aus. Der Roboter hebt die Hände - wahrscheinlich, damit sie sich nicht im Müll verfangen. Dann beginnt es sich durch die Trümmer zu bewegen. Er bleibt nur für eine Sekunde stehen, als es so aussieht, als ob ein Stück Holz in einem Schlackenblock steckt, und dreht sich ein wenig nach links, um es vom Weg zu entfernen. Bewegt das Kunststoffrohr nach rechts. Um 4:14 dreht er seinen Oberkörper wieder und steht vor der Treppe. Die Aufgabe dauert weniger als 5 Minuten.8. Die Aufgabe mit den Schritten.
Professor O sagte, dass es für viele Aufgaben, insbesondere zum Treppensteigen, wichtig ist, dass der Roboter seine Beine sehen kann. Große Roboter wie ATLAS können dies kaum, sie müssen den Körper biegen, was das Balancieren erschwert. DRC-HUBOlöst dieses Problem auf sehr intelligente Weise. Er steigt die Treppe rückwärts hinauf! Somit blockieren seine Knie nicht die Kameras und Sie können die Beine und den Boden sehen. Aber wie kann er Beine sehen, wenn er sich rückwärts erhebt? Natürlich den Oberkörper drehen! Sie können den gesamten Prozess ab 0:26 sehen. Der Roboter kniet vor der Treppe und dreht ihm plötzlich den Rücken zu. Dann steht er auf und um 0:55 sehen Sie, wie er den Oberkörper um 180 Grad dreht. Jetzt kann er die Stufen scannen und anfangen zu klettern. Beachten Sie jedoch, dass er zuvor zwei Schritte zur Seite links macht (1:45)! Nach ein paar Minuten - was dem Publikum wie eine Ewigkeit erschien - beginnt der Roboter endlich aufzusteigen und bricht die letzten drei Schritte nacheinander ab. Deutlich! In weniger als 7 Minuten DRC-HUBOsteht auf der Plattform. Das Video ist nicht zu hören, aber in diesem Moment explodierten das Team und das Publikum vor Applaus.KAIST machte vier Kopien des DRC-HUBO und übte mehr als einen Monat ohne Sicherheitskabel vor dem Wettbewerb. Sie trainierten auf der Straße, auf einem Parkplatz mit unebenem Untergrund und bei unterschiedlichen Wetterbedingungen, einschließlich starkem Sonnenschein und Wind. "Wenn wir die Sicherheitskabel nicht entfernen, haben die Bediener Angst", sagte Professor O in der Werkstatt nach dem Wettbewerb.Er fügte hinzu, dass sie während des Trainings alle Aufgaben in beiden Modi ausführten - im Stehen und auf den Knien (durchschnittliche Zeit 30 Minuten). Das Team war gut darin, die Trümmer mit den Händen von DRC-HUBO zu beseitigen , was sie beim DRC-Finale nicht demonstrieren konnten , und sie konnten auch Aufgaben auf einem schwierigeren Untergrund ausführen als im Wettbewerb., … ! - , .
Source: https://habr.com/ru/post/de380589/
All Articles