Roboter können empfindliche Objekte sanft berühren.
 Manipulator von Ameiseningenieuren ergriffen DieIngenieure der Universität für Wissenschaft und Technologie von Iowa haben eine neue Art von Manipulatoren für Roboter entwickelt, mit denen sie zerbrechliche und kleine Objekte präzise handhaben können. Kleine Röhren, die Tentakeln ähneln, wickeln sich um das gewünschte Objekt und halten es, ohne es zu quetschen.Der klassische Manipulator ähnelt einer Zange oder zwei Fingern, mit denen eine Person Gegenstände nimmt. Um den Gegenstand in Ihren Fingern zu halten, müssen Sie ihn drücken. Um ein Zerkleinern von zerbrechlichen Gegenständen und Gehäusen zu vermeiden, erfinden die Ingenieure verschiedene Saugnäpfe, emulieren Geckopfoten und wenden andere Innovationen an . Aber amerikanische Ingenieure beschlossen, Aufnahmen von Tintenfischen und dergleichen zu übernehmen.Mikrotubuli sind nur 8 Millimeter lang und haben einen Durchmesser von etwa 0,2 Millimetern. Das Material der Röhrchen ist Polydimethylsiloxan , ein transparentes Polymer.Das Funktionsprinzip der Rohre ist einfach. Sie sind auf einer Seite hermetisch geschlossen, und wenn das Gerät Luft in sie pumpt, richten sie sich auf, und wenn sie abgepumpt werden, werden sie in mehrere Ringe gefaltet.Die spezifische Form des Rohrendes und die unterschiedliche Wandstärke ermöglichen es ihm, sich kontrolliert zu einer Spirale zu kräuseln. Die komplexe Form der Röhre wurde dank vorläufiger Computermodellierung erstellt. Dies sind die ersten tentakelförmigen Manipulatoren, die sich so falten lassen, dass sie so klein werden. Details finden Sie in der Fachzeitschrift Nature .Solche Manipulatoren werden auf dem Gebiet der medizinischen Roboter Anwendung finden. Während des Betriebs können sanfte Griffe verwendet werden, um Strukturen wie Blutgefäße oder Weichteile zu fixieren und zu bewegen.Die Beine gewöhnlicher Spinnen arbeiten nach einem ähnlichen Prinzip. Die Beine der Spinne beugen sich wie üblich mit den Muskeln, und die Hämolymphe, eine spezielle Flüssigkeit, die durch die Höhle des Körpers des Arthropoden zirkuliert, wird durch den hydrostatischen Druck nicht gebeugt.Die Tentakel haben seit langem Ingenieure angezogen. Eine ähnliche Lösung mit flexiblen Druckluftschläuchen wurde bereits von Wissenschaftlern der Harvard School of Engineering and Applied Sciences (USA) demonstriert .
Manipulator von Ameiseningenieuren ergriffen DieIngenieure der Universität für Wissenschaft und Technologie von Iowa haben eine neue Art von Manipulatoren für Roboter entwickelt, mit denen sie zerbrechliche und kleine Objekte präzise handhaben können. Kleine Röhren, die Tentakeln ähneln, wickeln sich um das gewünschte Objekt und halten es, ohne es zu quetschen.Der klassische Manipulator ähnelt einer Zange oder zwei Fingern, mit denen eine Person Gegenstände nimmt. Um den Gegenstand in Ihren Fingern zu halten, müssen Sie ihn drücken. Um ein Zerkleinern von zerbrechlichen Gegenständen und Gehäusen zu vermeiden, erfinden die Ingenieure verschiedene Saugnäpfe, emulieren Geckopfoten und wenden andere Innovationen an . Aber amerikanische Ingenieure beschlossen, Aufnahmen von Tintenfischen und dergleichen zu übernehmen.Mikrotubuli sind nur 8 Millimeter lang und haben einen Durchmesser von etwa 0,2 Millimetern. Das Material der Röhrchen ist Polydimethylsiloxan , ein transparentes Polymer.Das Funktionsprinzip der Rohre ist einfach. Sie sind auf einer Seite hermetisch geschlossen, und wenn das Gerät Luft in sie pumpt, richten sie sich auf, und wenn sie abgepumpt werden, werden sie in mehrere Ringe gefaltet.Die spezifische Form des Rohrendes und die unterschiedliche Wandstärke ermöglichen es ihm, sich kontrolliert zu einer Spirale zu kräuseln. Die komplexe Form der Röhre wurde dank vorläufiger Computermodellierung erstellt. Dies sind die ersten tentakelförmigen Manipulatoren, die sich so falten lassen, dass sie so klein werden. Details finden Sie in der Fachzeitschrift Nature .Solche Manipulatoren werden auf dem Gebiet der medizinischen Roboter Anwendung finden. Während des Betriebs können sanfte Griffe verwendet werden, um Strukturen wie Blutgefäße oder Weichteile zu fixieren und zu bewegen.Die Beine gewöhnlicher Spinnen arbeiten nach einem ähnlichen Prinzip. Die Beine der Spinne beugen sich wie üblich mit den Muskeln, und die Hämolymphe, eine spezielle Flüssigkeit, die durch die Höhle des Körpers des Arthropoden zirkuliert, wird durch den hydrostatischen Druck nicht gebeugt.Die Tentakel haben seit langem Ingenieure angezogen. Eine ähnliche Lösung mit flexiblen Druckluftschläuchen wurde bereits von Wissenschaftlern der Harvard School of Engineering and Applied Sciences (USA) demonstriert .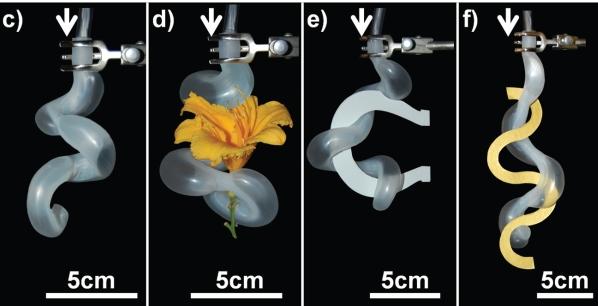 Erstellung von Ingenieuren aus HarvardAus ungewöhnlichen Lösungen können wir uns an das Konzept der Prothese erinnern , bei der der Motor die durch den Tentakel geführten Kabel zieht und löst. Sie ermöglichen es der Prothese, sich allmählich zu kräuseln und Objekte von klein bis ziemlich groß zu erfassen. Die Prothese richtet sich aufgrund der inneren Elastizität auf.
Erstellung von Ingenieuren aus HarvardAus ungewöhnlichen Lösungen können wir uns an das Konzept der Prothese erinnern , bei der der Motor die durch den Tentakel geführten Kabel zieht und löst. Sie ermöglichen es der Prothese, sich allmählich zu kräuseln und Objekte von klein bis ziemlich groß zu erfassen. Die Prothese richtet sich aufgrund der inneren Elastizität auf. Tentakelprothese
TentakelprotheseSource: https://habr.com/ru/post/de380865/
All Articles