Die Idee, einen Video-Slider und auch einen motorisierten zu erstellen, kam mir im August 2014. Zu diesem Zeitpunkt hatte ich mehr als ein Jahr lang nächtliche Sternenlandschaften fotografiert und mich entschlossen, mich im Zeitraffergeschäft zu versuchen.Im Zeitraffer wird "Lebendigkeit des Bildes" immer geschätzt! Das Ändern von Bildern, die mit einer statisch montierten Kamera erstellt wurden, wirkt sich in den meisten Fällen nicht so effektiv auf den Betrachter aus wie das gleiche Diagramm, wird jedoch bereits mit einer sich bewegenden Kamera im Weltraum aufgenommen. Die Komposition des Videos ist mit unbegrenzter Dynamik gefüllt und hinterlässt einen guten Eindruck auf dem Video! Was ist mit dem Verkauf solcher Geräte? Kein Problem! Das ist nur eine Angst vor kosmischen Preisen ... Bei der Suche nach Optionen, ob mit oder ohne Marke, kommen Sie zu dem Schluss, dass das Konzept des "Budget Motorized Slider" in der Natur nicht existiert! Die Budgetoption ist nur verfügbar, wenn Sie sie selbst entwerfen! Genau das habe ich getan!Ich habe nicht sofort mit der Herstellung des Schiebereglers begonnen, bis ich einen Ausweg gefunden habe, wie man eine Schiene kostengünstig herstellt! Alles begann mit ihr.Im Möbelgeschäft kaufte ich Führer für Möbelbeschläge und Rollen für sie.
Was ist mit dem Verkauf solcher Geräte? Kein Problem! Das ist nur eine Angst vor kosmischen Preisen ... Bei der Suche nach Optionen, ob mit oder ohne Marke, kommen Sie zu dem Schluss, dass das Konzept des "Budget Motorized Slider" in der Natur nicht existiert! Die Budgetoption ist nur verfügbar, wenn Sie sie selbst entwerfen! Genau das habe ich getan!Ich habe nicht sofort mit der Herstellung des Schiebereglers begonnen, bis ich einen Ausweg gefunden habe, wie man eine Schiene kostengünstig herstellt! Alles begann mit ihr.Im Möbelgeschäft kaufte ich Führer für Möbelbeschläge und Rollen für sie.
 Als Grundlage für die Schienen habe ich die 1,5 m lange Aluminium-Bauvorschrift verwendet, die auf dem Hof erhältlich ist (die eingebaute Ebene hilft bei der reibungslosen Installation des Schiebers). Mit Hilfe eines Bohrers, Auspuffnieten sowie Sperrholzeinsätzen an beiden Enden der Regel wurde in wenigen Stunden eine 2 Meter lange Schiene hergestellt.
Als Grundlage für die Schienen habe ich die 1,5 m lange Aluminium-Bauvorschrift verwendet, die auf dem Hof erhältlich ist (die eingebaute Ebene hilft bei der reibungslosen Installation des Schiebers). Mit Hilfe eines Bohrers, Auspuffnieten sowie Sperrholzeinsätzen an beiden Enden der Regel wurde in wenigen Stunden eine 2 Meter lange Schiene hergestellt. Dies gilt auch für die Beförderung. Ich habe es aus strapazierfähigem Plexiglas gemacht. Die Rollen wurden mit Schrauben und Muttern mit der Bezeichnung M6 befestigt.
Dies gilt auch für die Beförderung. Ich habe es aus strapazierfähigem Plexiglas gemacht. Die Rollen wurden mit Schrauben und Muttern mit der Bezeichnung M6 befestigt. Der erste Test ist leider fehlgeschlagen. Der Wagen rollte ruckartig und auf dem Video war es sehr auffällig (sanftes Auf und Ab). All dies ist auf die Rollen zurückzuführen, die normalerweise nicht in der Produktion zentriert sind (obwohl der Verkäufer sagte, dass das Zubehör italienisch ist). Der Ausweg besteht darin, alle Räder zu blockieren. Jetzt spielen sie die Rolle von Gleitlagern. Der Wagen begann linear auf der Schiene zu gleiten!
Der erste Test ist leider fehlgeschlagen. Der Wagen rollte ruckartig und auf dem Video war es sehr auffällig (sanftes Auf und Ab). All dies ist auf die Rollen zurückzuführen, die normalerweise nicht in der Produktion zentriert sind (obwohl der Verkäufer sagte, dass das Zubehör italienisch ist). Der Ausweg besteht darin, alle Räder zu blockieren. Jetzt spielen sie die Rolle von Gleitlagern. Der Wagen begann linear auf der Schiene zu gleiten!
 Um die Schiene auf Stativen zu halten, wurden zwei Stativplattformen daran befestigt. Hier sind sie hausgemacht, aus Sperrholz. Mit Schrauben und Muttern M6 befestigt.
Um die Schiene auf Stativen zu halten, wurden zwei Stativplattformen daran befestigt. Hier sind sie hausgemacht, aus Sperrholz. Mit Schrauben und Muttern M6 befestigt.






Elektriker
Was wollte ich ursprünglich machen? Zunächst war geplant, einen Antrieb für den Wagen zu verwenden. Dazu benötigen Sie lediglich einen Motor mit hohem Drehmoment, eine Batterie und eine Mikroschaltung, um die Geschwindigkeit zu steuern. Zum ersten Mal lernte ich Servos kennen und beschloss, sie in mein Projekt aufzunehmen. Der Chip war ein Servotester, der die Geschwindigkeit des Servos steuern kann. Was du brauchst! Muss nehmen! Aber wir haben es nicht eilig ...Weitere Bekanntschaft mit dem Servoantrieb kam mit einem Konzept wie Arduino. Und das ist gut! Ich dachte noch einmal über das Projekt nach und entschied, dass ich im Schieberegler keine konstante Wagenbewegung brauche, sondern eine Intervallbewegung. Schließlich kann eine Bewegung während der Belichtung (Nachtaufnahmen - Langzeitbelichtungen) den Rahmen mit Unschärfe verwerfen.Und da ich eine so intelligente Steuereinheit haben werde, habe ich beschlossen, meinen Schieberegler auch durch einen anderen Mechanismus zu ergänzen. Die Kamera bewegt sich nicht nur entlang der Schienen, sondern auch um eine vertikale Achse. Das Design kann als "Video-Slider mit einem Astrotracker an Bord" bezeichnet werden.Also wurde es gekauft:- Mikrocontroller Arduino UNO R3
- Servo TowerPro MG995 13 kg / cm
- Schrittmotor 28byj-48-5v + Treiber ULN2003
Zuerst habe ich das Servo aus demselben Plexiglas an der Schiene montiert.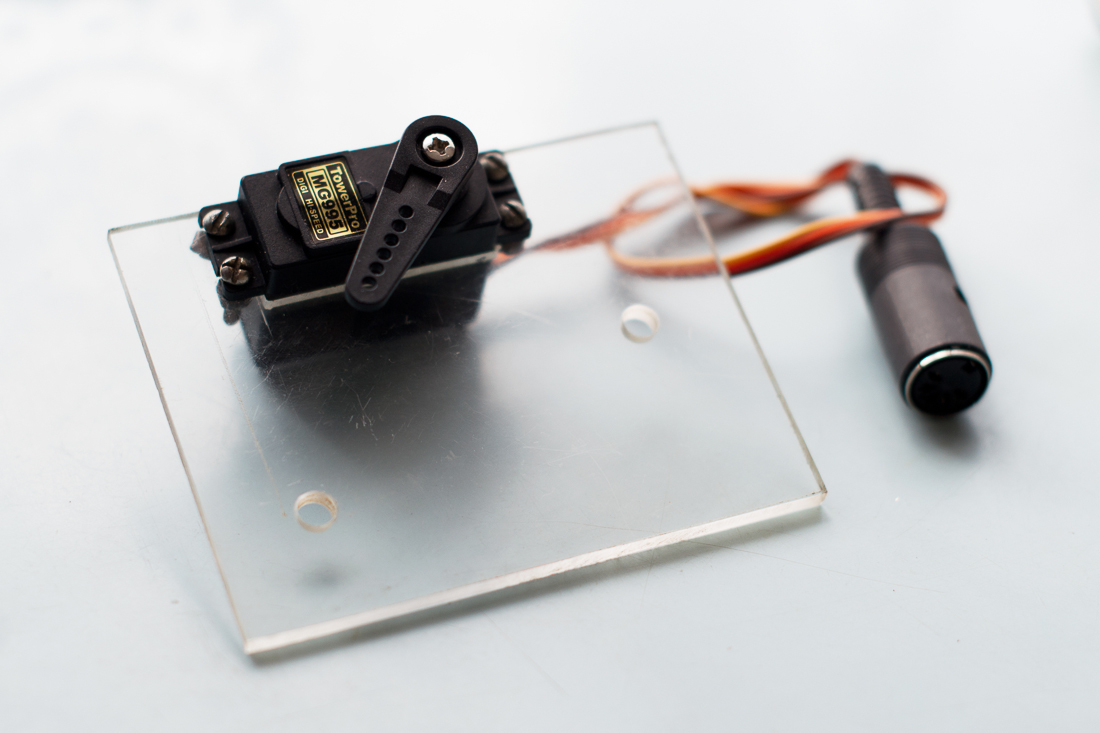 Der Schlitten und das Servo waren durch ein nicht dehnbares Gewinde verbunden, das auf seine Welle gewickelt ist.Die Kamera wird mit einem 28byj-48- Schrittmotor gedreht , der auf einem 1/55 Schneckengetriebe montiert ist.
Der Schlitten und das Servo waren durch ein nicht dehnbares Gewinde verbunden, das auf seine Welle gewickelt ist.Die Kamera wird mit einem 28byj-48- Schrittmotor gedreht , der auf einem 1/55 Schneckengetriebe montiert ist. Ich entschied mich für Arduino und andere elektrische Komponenten aus Plexiglas. Ich habe alles mit Sekundenkleber geklebt, obwohl sie normalerweise speziellen Kleber für dieses Material verwenden, der die Teile miteinander verlötet und sie dann nicht auseinander reißt. Um die Motoren an das Steuergerät anzuschließen, habe ich zwei Kabel hergestellt, an denen ich zuverlässige, bewährte sowjetische Stecker vom Typ DIN 5 PIN verwendet habe .
Ich entschied mich für Arduino und andere elektrische Komponenten aus Plexiglas. Ich habe alles mit Sekundenkleber geklebt, obwohl sie normalerweise speziellen Kleber für dieses Material verwenden, der die Teile miteinander verlötet und sie dann nicht auseinander reißt. Um die Motoren an das Steuergerät anzuschließen, habe ich zwei Kabel hergestellt, an denen ich zuverlässige, bewährte sowjetische Stecker vom Typ DIN 5 PIN verwendet habe . Die Stromversorgung erfolgt über einen normalen Gleichstromstecker.Batterie: 7,2 V, 2250 mAh :
Die Stromversorgung erfolgt über einen normalen Gleichstromstecker.Batterie: 7,2 V, 2250 mAh : Erste elektrische Testzeit! Wir schließen die Motoren an, schalten die Kamera ein, installieren die Kamera, schließen die Fernbedienung an und konfigurieren sie für Arduino: Verschlusszeit 30 Sek., Intervall 5 Sek. Wir drücken gleichzeitig Start auf der Fernbedienung und Arduino. Wir warten ...In weniger als fünf Minuten wurde Asynchronität in der Arbeit entdeckt. Der Hauptmotor begann sich zu drehen, als der Verschluss noch geöffnet war. Die Sache ist die Fernbedienung: Sie zählt die Zeit nicht richtig. Wenn in Echtzeit 30 Sekunden vergehen, zählt der Zähler auf der Fernbedienung nur 28 bis 29 Sekunden. Er wird langsamer. Vielleicht aufgrund der Tatsache, dass Chinesisch oder aus einem anderen Grund (es wird interessant sein, von Ihnen zu lernen, warum so)!Um dies zu vermeiden, müssen Sie alles auf der Basis eines Systems tun - Arduino. Aber wie kann man den Verschluss der Kamera über Arduino steuern?Google nochmal um zu helfen!Fernbedienungsadapter :
Erste elektrische Testzeit! Wir schließen die Motoren an, schalten die Kamera ein, installieren die Kamera, schließen die Fernbedienung an und konfigurieren sie für Arduino: Verschlusszeit 30 Sek., Intervall 5 Sek. Wir drücken gleichzeitig Start auf der Fernbedienung und Arduino. Wir warten ...In weniger als fünf Minuten wurde Asynchronität in der Arbeit entdeckt. Der Hauptmotor begann sich zu drehen, als der Verschluss noch geöffnet war. Die Sache ist die Fernbedienung: Sie zählt die Zeit nicht richtig. Wenn in Echtzeit 30 Sekunden vergehen, zählt der Zähler auf der Fernbedienung nur 28 bis 29 Sekunden. Er wird langsamer. Vielleicht aufgrund der Tatsache, dass Chinesisch oder aus einem anderen Grund (es wird interessant sein, von Ihnen zu lernen, warum so)!Um dies zu vermeiden, müssen Sie alles auf der Basis eines Systems tun - Arduino. Aber wie kann man den Verschluss der Kamera über Arduino steuern?Google nochmal um zu helfen!Fernbedienungsadapter : Der Fernbedienungsadapter ist an einem Ende mit der Kamera und am anderen Ende (Buchse 2.5) mit dem Fernbedienungskabel verbunden. Buchse 2.5 hat drei Kontakte. Aus dem Prinzip der Fernbedienung der Kamera habe ich gelernt, dass zwei dieser drei Kontakte geschlossen sein müssen, um den Verschluss auszulösen. Nachdem ich mehrere Kombinationen ausprobiert hatte, fand ich, dass es funktioniert!Ich habe ein zweiadriges Kabel hergestellt, von dem ein Ende eine 2,5-fache Buchse für die Mutter hat und über diesen Adapter der Fernbedienung mit der Kamera verbunden ist. Das andere Ende geht zur Steuereinheit. Darin kam ich mit Hilfe eines mechanischen Knopfes, um diese beiden Venen zu schließen. Es besteht aus Mikroservo und Kontaktknopf.Eine Mikroservo-Wippe drückt zu einem bestimmten Zeitpunkt einen Uhrknopf und schließt so zwei Kontakte. Die Kamera macht ein Bild:
Der Fernbedienungsadapter ist an einem Ende mit der Kamera und am anderen Ende (Buchse 2.5) mit dem Fernbedienungskabel verbunden. Buchse 2.5 hat drei Kontakte. Aus dem Prinzip der Fernbedienung der Kamera habe ich gelernt, dass zwei dieser drei Kontakte geschlossen sein müssen, um den Verschluss auszulösen. Nachdem ich mehrere Kombinationen ausprobiert hatte, fand ich, dass es funktioniert!Ich habe ein zweiadriges Kabel hergestellt, von dem ein Ende eine 2,5-fache Buchse für die Mutter hat und über diesen Adapter der Fernbedienung mit der Kamera verbunden ist. Das andere Ende geht zur Steuereinheit. Darin kam ich mit Hilfe eines mechanischen Knopfes, um diese beiden Venen zu schließen. Es besteht aus Mikroservo und Kontaktknopf.Eine Mikroservo-Wippe drückt zu einem bestimmten Zeitpunkt einen Uhrknopf und schließt so zwei Kontakte. Die Kamera macht ein Bild: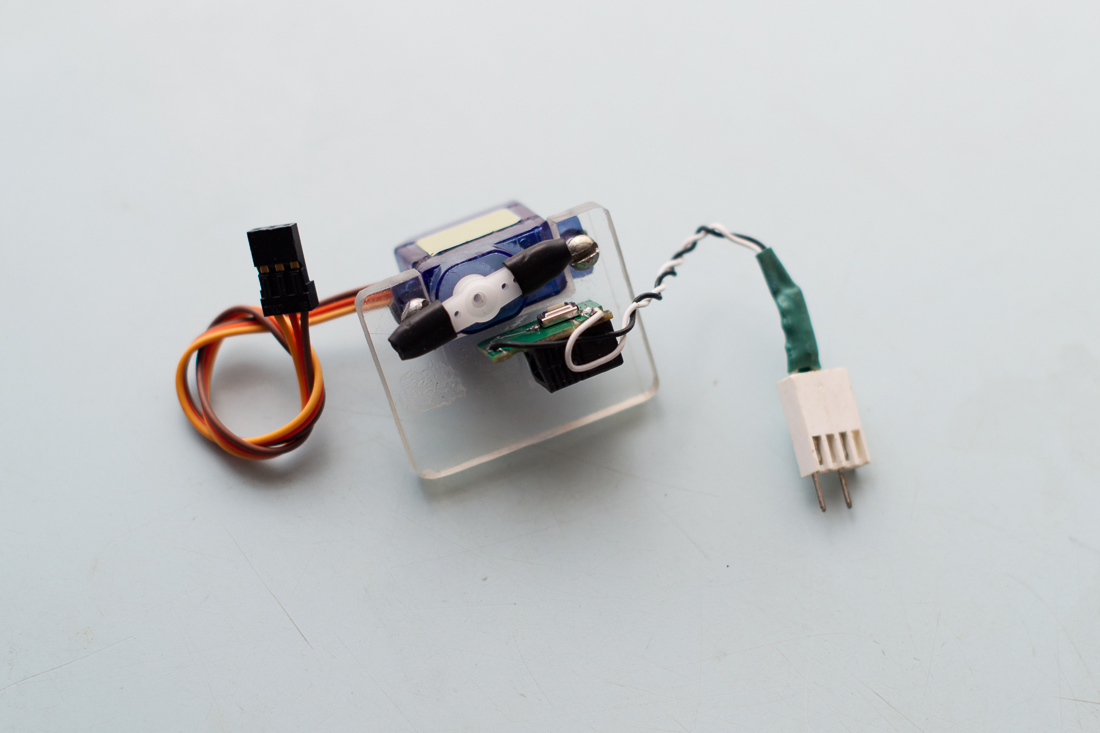 Kernkabel:
Kernkabel: zweiadriges Kabel + Fernadapter:
zweiadriges Kabel + Fernadapter: Im Spätherbst, als es einen kleinen Gefrierschrank gab, entschied ich mich irgendwie, den Schieber zu testen und fand einen weiteren Defekt: Selbst bei + 2 ° C weigerte sich das Hauptservo zu arbeiten. Dies war auf eine Verdickung der Getriebeschmierung zurückzuführen. Nach 5-10 Minuten blieb das Servo bei dieser Temperatur hängen.Später, bereits im echten Winter, als es Frost bis -10 ° C gab, machte sich auch das Mikroservo bemerkbar! Obwohl bei der gleichen Temperatur bei + 2 ° C, bei der der große MG995 nicht mehr funktioniertefunktionierte der mechanische Knopf stabil und verursachte keine Beschwerden. Anscheinend liegt dies an der Tatsache, dass sie sich in einem Fall mit einem Arduino befand, bei dem ein Mikromotor nicht schnell einfrieren konnte. Dann hat der Knopf gut funktioniert, aber jetzt wurde nicht jedes Mal das Auslösesignal gesendet, und das ist nicht das, was wir brauchen. Ich musste ändern.Bald fand er eine Lösung für Motor und Auslöser. Ich kaufte einen bipolaren Schrittmotor wie Nema 17 und einen sperrigen selbstgebauten Fahrer vom Verkäufer. Und kein Frost ist jetzt ein Hindernis!
Im Spätherbst, als es einen kleinen Gefrierschrank gab, entschied ich mich irgendwie, den Schieber zu testen und fand einen weiteren Defekt: Selbst bei + 2 ° C weigerte sich das Hauptservo zu arbeiten. Dies war auf eine Verdickung der Getriebeschmierung zurückzuführen. Nach 5-10 Minuten blieb das Servo bei dieser Temperatur hängen.Später, bereits im echten Winter, als es Frost bis -10 ° C gab, machte sich auch das Mikroservo bemerkbar! Obwohl bei der gleichen Temperatur bei + 2 ° C, bei der der große MG995 nicht mehr funktioniertefunktionierte der mechanische Knopf stabil und verursachte keine Beschwerden. Anscheinend liegt dies an der Tatsache, dass sie sich in einem Fall mit einem Arduino befand, bei dem ein Mikromotor nicht schnell einfrieren konnte. Dann hat der Knopf gut funktioniert, aber jetzt wurde nicht jedes Mal das Auslösesignal gesendet, und das ist nicht das, was wir brauchen. Ich musste ändern.Bald fand er eine Lösung für Motor und Auslöser. Ich kaufte einen bipolaren Schrittmotor wie Nema 17 und einen sperrigen selbstgebauten Fahrer vom Verkäufer. Und kein Frost ist jetzt ein Hindernis!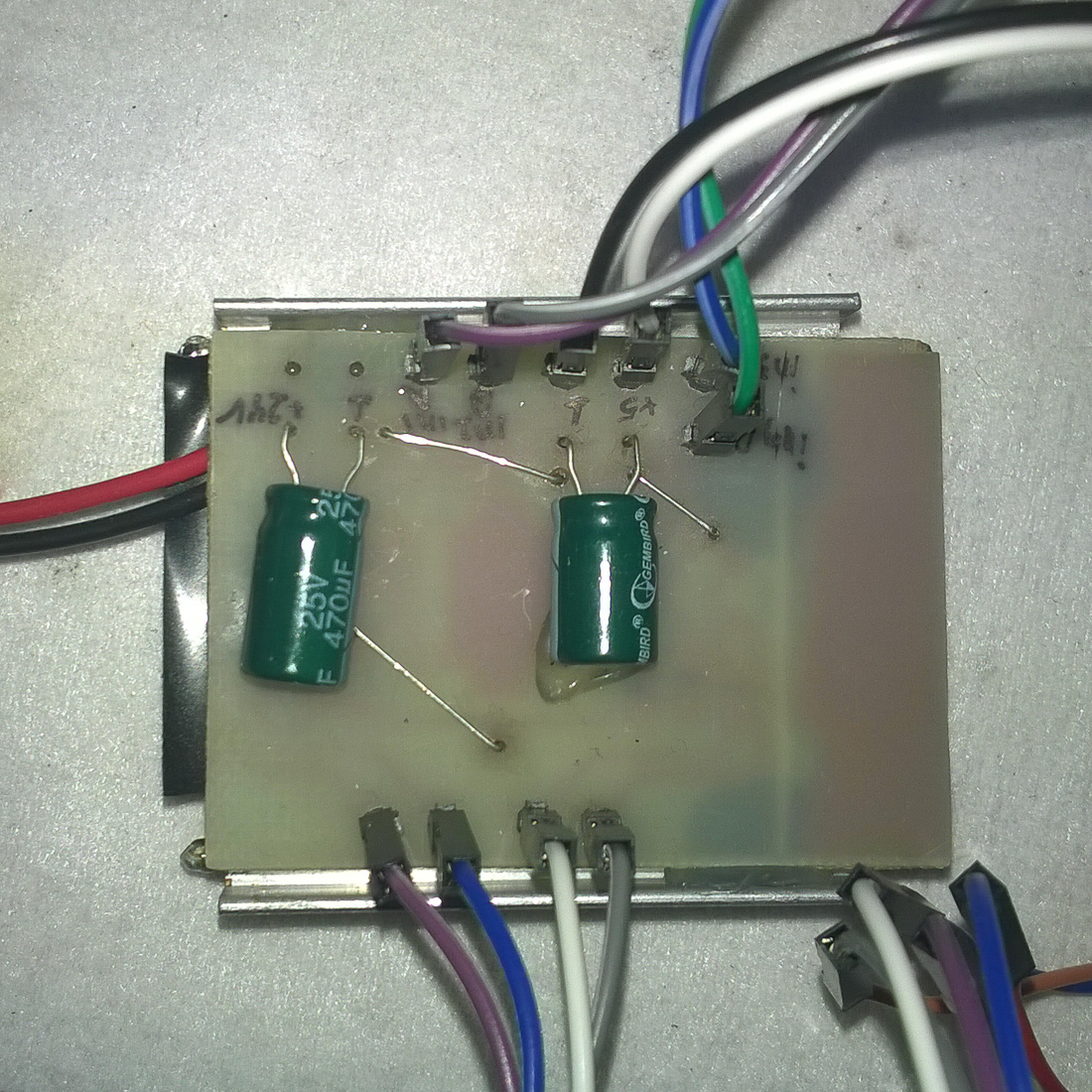 Ich habe diesen Schrittmotor auch in Verbindung mit einem ähnlichen 1/55 Getriebe verwendet, über das ich oben geschrieben habe. Das Kabel ist auf eine Rolle gewickelt.
Ich habe diesen Schrittmotor auch in Verbindung mit einem ähnlichen 1/55 Getriebe verwendet, über das ich oben geschrieben habe. Das Kabel ist auf eine Rolle gewickelt. Ich habe das Problem mit der Taste gelöst, indem ich einen Artikel im Internet über einen hausgemachten Intervallmesser für eine Arduino-basierte Kamera gelesen habe. Dort wurde ein herkömmlicher Transistor verwendet, um die Schaltung zu schließen (zwei Kontakte).Ich habe auch einen riesigen selbstgebauten Fahrer losgeworden, der aufgrund der hohen Strömung brutal aufgeheizt wurde und einfach zur falschen Zeit ausfallen konnte. Nachdem ich es später durch den berühmten EasyDriver ersetzt hatte , hatte ich die Möglichkeit, den Strom im Treiber aufgrund des Abstimmwiderstands anzupassen. Die Stromstärke beeinflusst proportional das Motordrehmoment. Es ist hier weniger als die Hälfte der maximalen Norm, da ein Schneckengetriebe mit einem großen Übersetzungsverhältnis verwendet wird. Der Fahrer begann sich deutlich weniger aufzuwärmen.Auch in EasyDriverEs ist möglich, einfach einen "Schlafmodus" einzurichten, wenn der Fahrer ausgeschaltet ist und im Haltemoment des Motors keinen Strom verbraucht - der Motor ist vollständig ausgeschaltet. Die Möglichkeit, den Schritt zu teilen, ist ebenfalls kein zusätzliches Merkmal! Jetzt können Sie problemlos eine relativ identische Kopie der Steuereinheit aus den im Geschäft gekauften Komponenten erstellen!Jetzt ist viel mehr Platz im Koffer als früher.BEFORE
Ich habe das Problem mit der Taste gelöst, indem ich einen Artikel im Internet über einen hausgemachten Intervallmesser für eine Arduino-basierte Kamera gelesen habe. Dort wurde ein herkömmlicher Transistor verwendet, um die Schaltung zu schließen (zwei Kontakte).Ich habe auch einen riesigen selbstgebauten Fahrer losgeworden, der aufgrund der hohen Strömung brutal aufgeheizt wurde und einfach zur falschen Zeit ausfallen konnte. Nachdem ich es später durch den berühmten EasyDriver ersetzt hatte , hatte ich die Möglichkeit, den Strom im Treiber aufgrund des Abstimmwiderstands anzupassen. Die Stromstärke beeinflusst proportional das Motordrehmoment. Es ist hier weniger als die Hälfte der maximalen Norm, da ein Schneckengetriebe mit einem großen Übersetzungsverhältnis verwendet wird. Der Fahrer begann sich deutlich weniger aufzuwärmen.Auch in EasyDriverEs ist möglich, einfach einen "Schlafmodus" einzurichten, wenn der Fahrer ausgeschaltet ist und im Haltemoment des Motors keinen Strom verbraucht - der Motor ist vollständig ausgeschaltet. Die Möglichkeit, den Schritt zu teilen, ist ebenfalls kein zusätzliches Merkmal! Jetzt können Sie problemlos eine relativ identische Kopie der Steuereinheit aus den im Geschäft gekauften Komponenten erstellen!Jetzt ist viel mehr Platz im Koffer als früher.BEFORE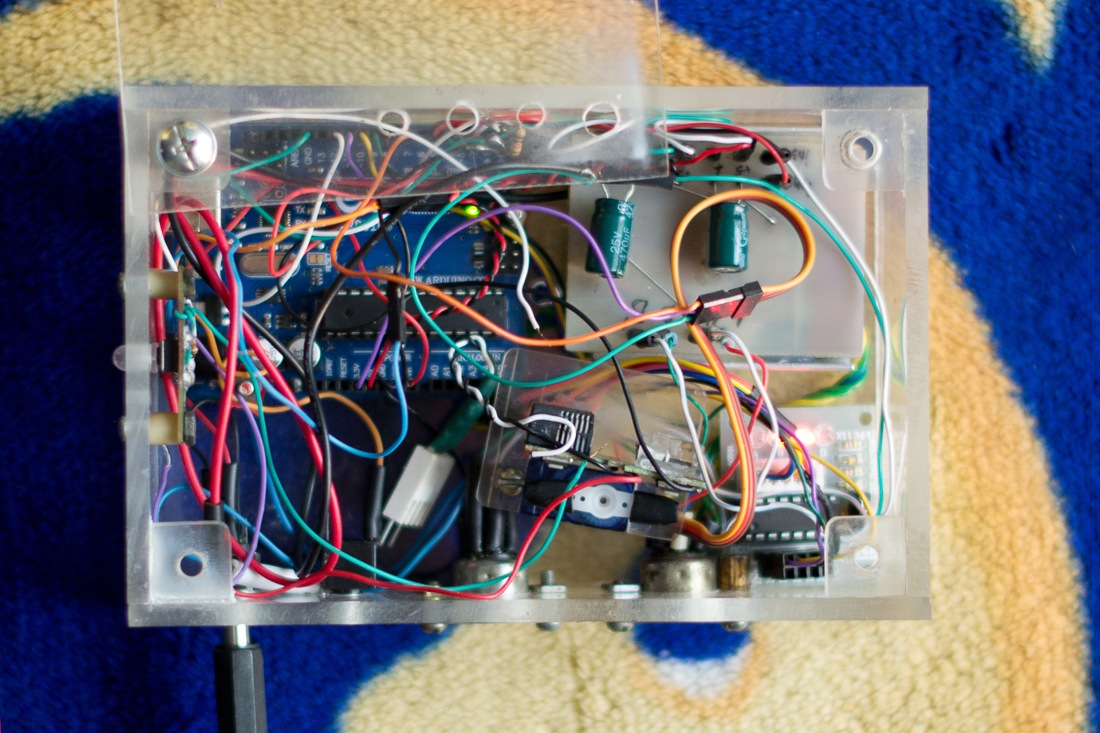 AFTER
AFTER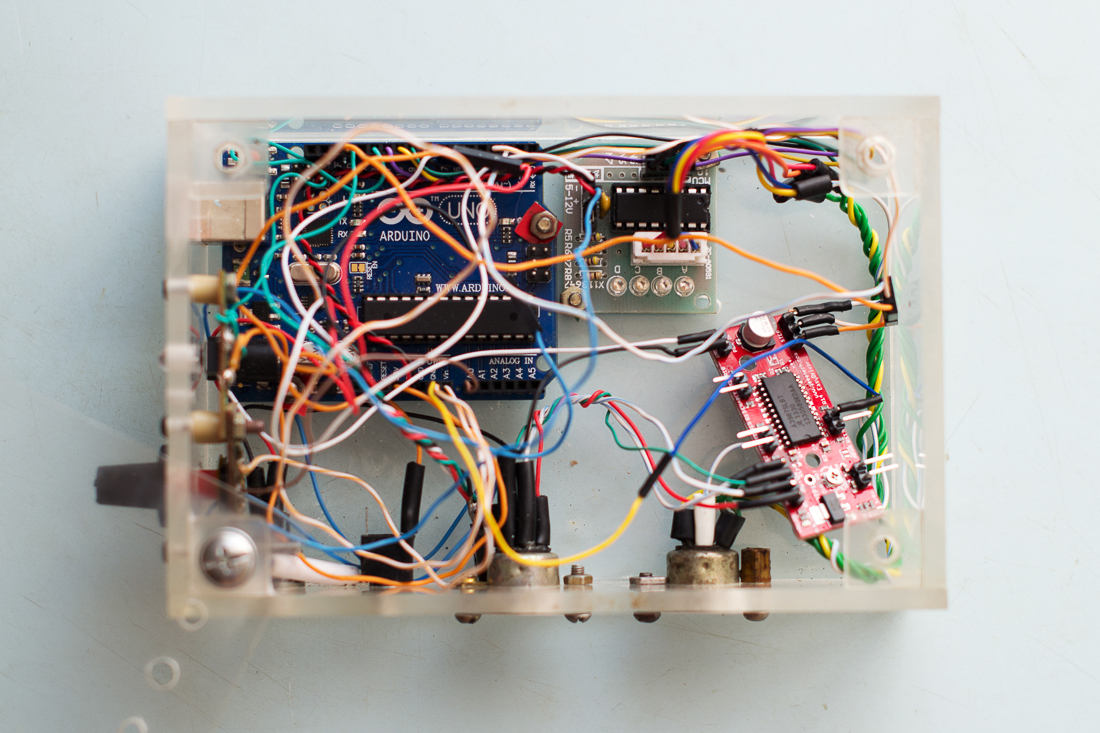
Zeit
Ich habe das meiste davon damit verbracht, Programmieren in Arduino zu lernen. Und auch jetzt kann meine Skizze geändert werden. Es gibt nur ein Problem. Ich kann es nicht schaffen, dass das Drücken der Uhrtaste die Betriebsart umschaltet und ständig auf einer davon bleibt. Die Modi unterscheiden sich nur in der Belichtungszeit. Das Intervall ist immer gleich und beträgt 3,5 Sekunden. Ich habe viel versucht, aber solange es eine solche Option gibt. Ich habe es am Ende des Winters geschrieben und es passt zu mir.Es ist ganz einfach: Die Verschlusszeit wird eingestellt und entspricht dem Zeitraum, der vom Beginn des Programms bis zum einmaligen Drücken der Uhrentaste vergangen ist. Um dies zu ändern, müssen Sie Arduino neu starten.Skizzieren:#include <Stepper.h>
int Distance = 0;
int x = 0;
#define STEPS_MOTOR 32
#define STEPS_OUTPUT 32 * 64
Stepper stepper2(STEPS_MOTOR, 8, 10, 9, 11);
int steps;
int button = 12;
int previousMillis = 0;
void setup()
{
pinMode(13, OUTPUT);
pinMode(12, INPUT);
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(7, OUTPUT);
}
void loop()
{
if (digitalRead(12) == HIGH)
{
previousMillis = millis();
int x = map(previousMillis,60000, 0, 78, 0);
a:
digitalWrite(2, HIGH);
digitalWrite(3, LOW);
{
digitalWrite(3, HIGH);
delayMicroseconds(552);
digitalWrite(3, LOW);
delayMicroseconds(552);
Distance = Distance + 1;
if (Distance == 3620)
{
if (digitalRead(2) == HIGH)
{
digitalWrite(2, HIGH);
}
else
{
digitalWrite(2, LOW);
}
digitalWrite(2, LOW);
digitalWrite(3, LOW);
steps = STEPS_OUTPUT;
stepper2.setSpeed(161.25);
stepper2.step(steps = - x);
digitalWrite(8, LOW);
digitalWrite(10, LOW);
digitalWrite(9, LOW);
digitalWrite(11, LOW);
delay(500);
digitalWrite(13, HIGH);
digitalWrite(7, HIGH);
delay(50);
digitalWrite(7, LOW);
digitalWrite(13, LOW);
delay(previousMillis-3050);
Distance = 0;
}
}
goto a;
}}
Slider-Installation


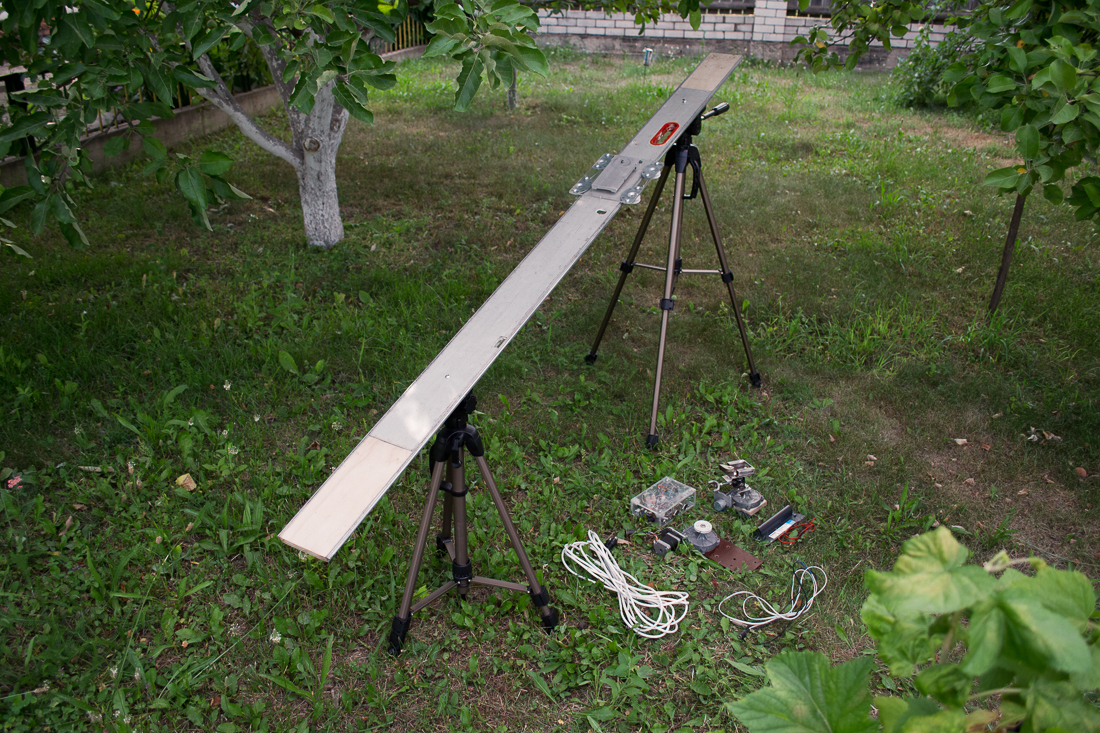

Alles ist verbunden. Der Schieberegler ist einsatzbereit!




Ergebnisse
Was ich denke:Im Moment ist der Schieberegler einsatzbereit und erfüllt seinen Zweck vollständig, aber es gibt einige Nuancen, die ich in Zukunft abschließen möchte. Fast alle gehören zum Wagen. Ich denke du hast es bemerkt.Wir brauchen einen zuverlässigeren Mechanismus zum Halten des "Astrotrackers". Die Achse der Welle sollte immer senkrecht zum Boden stehen. Der Markenstativkopf verleiht meinem Design einen noch ästhetischeren Look, der ursprünglich von mir entworfen wurde! Was die Elektronik betrifft: So passt es mir hier, sogar die Skizze auf Arduino! Auf jeden Fall habe ich das geplante Ergebnis bereits erreicht!Ein rein technisches Beispiel für den Slider (Winter, Februar, -15 ° C):Die Kosten für diesen Video-Schieberegler betragen weniger als 100 US-Dollar, ohne die Kosten für zwei Stative.Vielen Dank für Ihre Aufmerksamkeit! Viel Glück an alle in hausgemachten!