Quadcopter - wie hat alles angefangen?
Ein moderner Quadro-Copter (Hexa, Octo) ist ein ziemlich leistungsfähiges „Computer“ -Gerät, das von einem Smartphone über WLAN gesteuert werden kann, an einem Punkt hängt, entlang einer Route fliegt usw. Jeder kann jetzt ein solches Gerät kaufen. Wie hat alles angefangen?Wie fliegt ein Quadrocopter?
Um die Essenz technischer Lösungen zu verstehen, werden wir ein wenig verstehen, wie ein Quadrocopter fliegt. In der Tat ist ein Quadrocopter ein instabiles System. Wenn Sie 4 Motoren nehmen und diese einfach an die Batterie anschließen, fliegt der Quadrocopter nirgendwo hin, er rollt einfach um. Die Zugkraft von Motoren wird niemals identisch sein. Und dann tritt die Elektronik in Kraft. An Bord des Quadrocopters befindet sich eine zentrale „Steuerkarte“, deren Hauptteil die Sensoreinheit ist. Im einfachsten Fall handelt es sich um ein dreiachsiges Gyroskop. Der Mikrocontroller liest ständig Daten von Gyroskopen, und sobald das Gyroskop die Neigung entlang einer Achse „erfasst“, weist die Steuerung den entsprechenden Motor an, die Geschwindigkeit leicht zu erhöhen oder zu verringern, um die Neigung auszugleichen. Im Allgemeinen die gesamte Logik - mit Ausnahme einer Reihe von allem (PID-Regler, Regeltheorie, Kalman-Filter),Es gibt nichts Kompliziertes (ein Witz). Nun, für den Benutzer ist alles wirklich transparent. Es gibt keine beweglichen Teile außer Motoren im Quadrocopter. Die gesamte Steuerung erfolgt ausschließlich durch Ändern der Motordrehzahl (bei ähnlichen Drehungen - wir ändern die Drehzahl, wir erhalten das Drehmoment). Nun zurück zur Geschichte.Vorsicht, Verkehr.Mikrokopter
Das legendäre deutsche Unternehmen, dank dessen Ingenieure 2006 das erste Gerät auf den Markt kam. Der Controller hatte einen Atmega644-Prozessor mit 4 KB Speicher und einer Frequenz von bis zu 20 MHz an Bord, 3 Gyroskope auf jeder Achse, einen Beschleunigungsmesser (für horizontalen Flug) und ein Barometer zur Aufrechterhaltung der Höhe (die Genauigkeit des MPX4115A-Barometers beträgt etwa 1 m). Später erschienen zusätzliche Module, zum Beispiel GPS zum Halten einer Position.Jetzt finden Sie auf youtube ein Video darüber, wie alles geflogen ist (2007).Im Allgemeinen war das System sehr erfolgreich. Ihre Produkte waren nie billig, der Preis begann irgendwo bei 1500 Euro. Das Unternehmen existiert jetzt, sie produzieren professionelle Geräte, die entsprechende Preiskategorie. Und noch ein wichtiger Punkt: Zunächst haben die Entwickler von Microcopter den Quellcode geöffnet. Natürlich tauchten in naher Zukunft verschiedene Klone (einschließlich der in der Russischen Föderation hergestellten) auf, was sich natürlich negativ auf den Umsatz auswirkte, und dann wurde der Code geschlossen. Dennoch denke ich, dass dies ein großer Anstoß für die Schaffung eines anderen Multikoptertyps war.Wir MikroKopter waren wegen des Preises nicht beliebt und es gab nicht so viele Besitzer. Die Weltgemeinschaft erhielt jedoch einen Anstoß, und verschiedene Systeme tauchten auf.Kaptainkuk
Eines der einfachsten Systeme (in verschiedenen Versionen) von 2010 bis heute. Die Steuerplatine hat nur 3 Gyroskope, gewöhnliche variable Widerstände werden verwendet, um die Parameter einzustellen.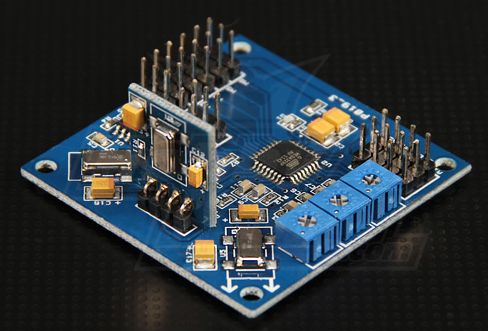 (Foto von Hobbyking.com)Ein solches Board kostet jetzt nur noch etwa 15 US-Dollar, wie Sie an Bord sehen können. Neben Gyroskopen und einem schwachen Prozessor gibt es im Allgemeinen nichts. Die Firmware im Quellcode für KK ist im Internet frei verfügbar. Wer sie möchte, kann sie herunterladen, indem er in der Google-Suche den Dateinamen „kk2_1V1.zip“ eingibt (die Größe beträgt nur 90 KB). Dies ist wahrscheinlich die erste und neueste Version der Firmware eines Copters, die in Assembler geschrieben wurde.
(Foto von Hobbyking.com)Ein solches Board kostet jetzt nur noch etwa 15 US-Dollar, wie Sie an Bord sehen können. Neben Gyroskopen und einem schwachen Prozessor gibt es im Allgemeinen nichts. Die Firmware im Quellcode für KK ist im Internet frei verfügbar. Wer sie möchte, kann sie herunterladen, indem er in der Google-Suche den Dateinamen „kk2_1V1.zip“ eingibt (die Größe beträgt nur 90 KB). Dies ist wahrscheinlich die erste und neueste Version der Firmware eines Copters, die in Assembler geschrieben wurde.Multiwii
Der nächste Meilenstein in der Entwicklung von Koptern war das MultiWii-System. Der Name stammt von den Spielern Nintendo Wii und Wii Nunchuk, die die Handwerker zerlegten und von dort aus ein Brett mit Sensoren heraussägten. Der Arduino Nano wurde als Zentralprozessor verwendet.Das Erscheinungsbild des Boards sah ungefähr so aus (Foto von der rcgroups-Website, 2010):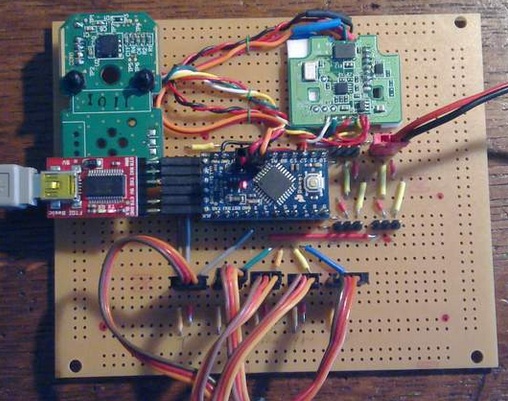 In einigen Jahren hat sich das System jedoch weiterentwickelt, und die letzten Boards (sie werden jetzt verkauft, der Preis beträgt 20 bis 30 US-Dollar) sehen ungefähr so aus:
In einigen Jahren hat sich das System jedoch weiterentwickelt, und die letzten Boards (sie werden jetzt verkauft, der Preis beträgt 20 bis 30 US-Dollar) sehen ungefähr so aus: (Foto von der Website Hobbyking.com)Die neuesten Versionen von MultiWii verfügen über recht gute Sensoren. Sie können an einem Punkt des GPS hängen, die Höhe halten und nach Hause zurückkehren. weil Multiwii wurde für Arduino geschrieben, alle Boards sind Arduino-kompatibel geblieben, der Quellcode kann auf Github heruntergeladen werden. Einer der Nachteile von MultiWii ist sein schwacher Prozessor, der die Rechenfähigkeiten der Algorithmen einschränkt. Spätere Klone auf STM32 tauchten auf, aber sie machten das Wetter nicht so In Bezug auf die Hardware ist jeder Quadrocopter recht einfach, 95% der Komplexität liegt genau im Code. Gleichzeitig bin ich sicher, dass es MultiWii-Quellen sind, die die Grundlage aller heutigen kommerziellen Systeme wurden.
(Foto von der Website Hobbyking.com)Die neuesten Versionen von MultiWii verfügen über recht gute Sensoren. Sie können an einem Punkt des GPS hängen, die Höhe halten und nach Hause zurückkehren. weil Multiwii wurde für Arduino geschrieben, alle Boards sind Arduino-kompatibel geblieben, der Quellcode kann auf Github heruntergeladen werden. Einer der Nachteile von MultiWii ist sein schwacher Prozessor, der die Rechenfähigkeiten der Algorithmen einschränkt. Spätere Klone auf STM32 tauchten auf, aber sie machten das Wetter nicht so In Bezug auf die Hardware ist jeder Quadrocopter recht einfach, 95% der Komplexität liegt genau im Code. Gleichzeitig bin ich sicher, dass es MultiWii-Quellen sind, die die Grundlage aller heutigen kommerziellen Systeme wurden.Arducopter
Ein anderes Arduino-basiertes System ging am weitesten. Jetzt ist es ein System mit der Möglichkeit eines programmierbaren Punkt-zu-Punkt-Flugs, der Unterstützung von Funkmodems und der Telemetrieübertragung, der Speicherung verschiedener Protokolle usw.Ihre Software sieht ungefähr so aus: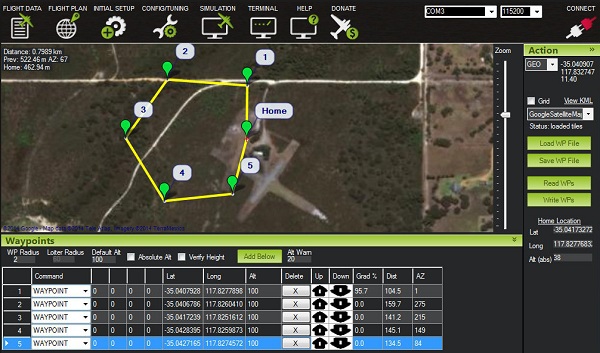 Boards haben sich daraus entwickelt: Für
Boards haben sich daraus entwickelt: Für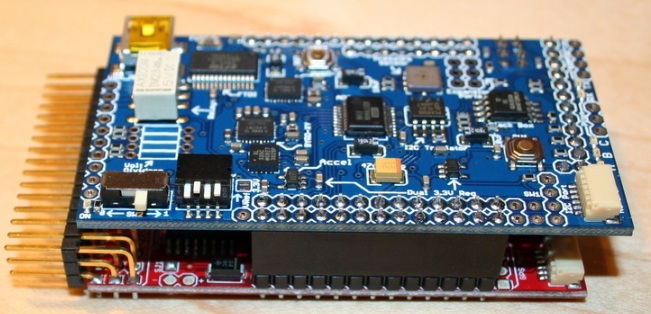 diese
diese Boards wird jetzt der Preis von 50 USD (pro Klon) bis verkauft 250 $ für die Originalversionen. Ardupilot-Quellcodes sind auch auf Github vollständig verfügbar. Gemessen an der Anzahl der Commits entwickelt sich das Projekt aktiv weiter. Dieses System ist professionellen Geräten nicht unterlegen, die Flugqualität ist im Video zu sehen:Hier ist alles cool, bis auf ein „aber“ - es ist Open Source mit allen daraus resultierenden Konsequenzen. Das System ist offen, wird von Enthusiasten fertiggestellt und niemand garantiert etwas, einschließlich der Abwesenheit von Fehlern in der Software. Wenn der Quadrocopter auf den BMW eines anderen fällt, gibt es niemanden, über den man sich beschweren kann.
Boards wird jetzt der Preis von 50 USD (pro Klon) bis verkauft 250 $ für die Originalversionen. Ardupilot-Quellcodes sind auch auf Github vollständig verfügbar. Gemessen an der Anzahl der Commits entwickelt sich das Projekt aktiv weiter. Dieses System ist professionellen Geräten nicht unterlegen, die Flugqualität ist im Video zu sehen:Hier ist alles cool, bis auf ein „aber“ - es ist Open Source mit allen daraus resultierenden Konsequenzen. Das System ist offen, wird von Enthusiasten fertiggestellt und niemand garantiert etwas, einschließlich der Abwesenheit von Fehlern in der Software. Wenn der Quadrocopter auf den BMW eines anderen fällt, gibt es niemanden, über den man sich beschweren kann.Bürstenloser Kardanring
Parallel zu Quadrocoptern wurde eine weitere sehr interessante Technologie entwickelt - ein bürstenloses Gimbal für Foto- / Videokameras. Dies ist eine separate Platine mit ihren Sensoren, die die Kamera aufgrund von zwei Motoren in der gewünschten Position hält und Windungen in den entsprechenden Achsen ausgleicht. Sie wurden von unserem Landsmann entwickelt, wie die Federung funktioniert, ist im Video (2013) zu sehen.Es ist zu sehen, dass der Copter schwingt, die Kameraachse jedoch nicht.Jetzt ist es für niemanden überraschend, und dann war es ein echter Durchbruch in der Qualität der Videoaufnahmen.Kommerzielle Systeme
Über sie zu schreiben ist nicht so interessant, weil Das Prinzip hier ist einfach: "Zahlen und Fliegen". Der erste war der oben erwähnte MicroKopter, der nächste (und nicht sehr erfolgreiche) Versuch war XAircraft. Gaui-Geräte waren im Budgetbereich beliebt (dies war das erste Budget-Gerät, dessen Preis für einen fertigen Copter etwa 400 US-Dollar betrug). Und schließlich ist DJI das erfolgreichste Unternehmen, über das nur die Faulen nicht geschrieben haben. Es macht also keinen Sinn, dies hier zu wiederholen. Sie kamen mit DJI Naza-Controllern auf den Markt (zu einem Preis von 200 bis 400 US-Dollar, mit der Möglichkeit, eine Position zu halten und nach Hause zurückzukehren). Es gab eine separate professionelle DJI Wookong-Serie (zu einem Preis von etwa 1.000 US-Dollar und höherer Flugstabilität). Schließlich betrat DJI den Markt für flugbereite Geräte (RTF, Ready To Fly), von denen jeder bereits weiß.Und die neuesten Videos.Der erste preisgünstige Quadrocopter Gaui 330. Ausgabepreis von 400 US-Dollar, 2010, keine zusätzlichen Funktionen.Dji Naza v2, der Ausgabepreis ist der gleiche $ 400, die Fähigkeit, eine Position zu halten, nach Hause zurückzukehren, beide Seiten zum Piloten zu fliegen (sorgloser Modus).Dji Phantom 3 - mit integriertem Kamera-Gimbal, Smartphone-Steuerung und anderen Extras.Das ist alles für den Moment, sorry für die große Anzahl von Videos, aber ohne sie nichts, sonst wäre es uninteressant. Mal sehen, was nach 5 Jahren als nächstes passiert ... Source: https://habr.com/ru/post/de384163/
All Articles