Elektronischer Analysator von Abbildung acht und Oval eines Fahrradrades
Wenn Sie viele Fahrräder fahren, müssen Sie diese manchmal reparieren. Eine der Fehlfunktionen, mit denen Sie konfrontiert werden müssen, ist die Achterrad oder das Oval.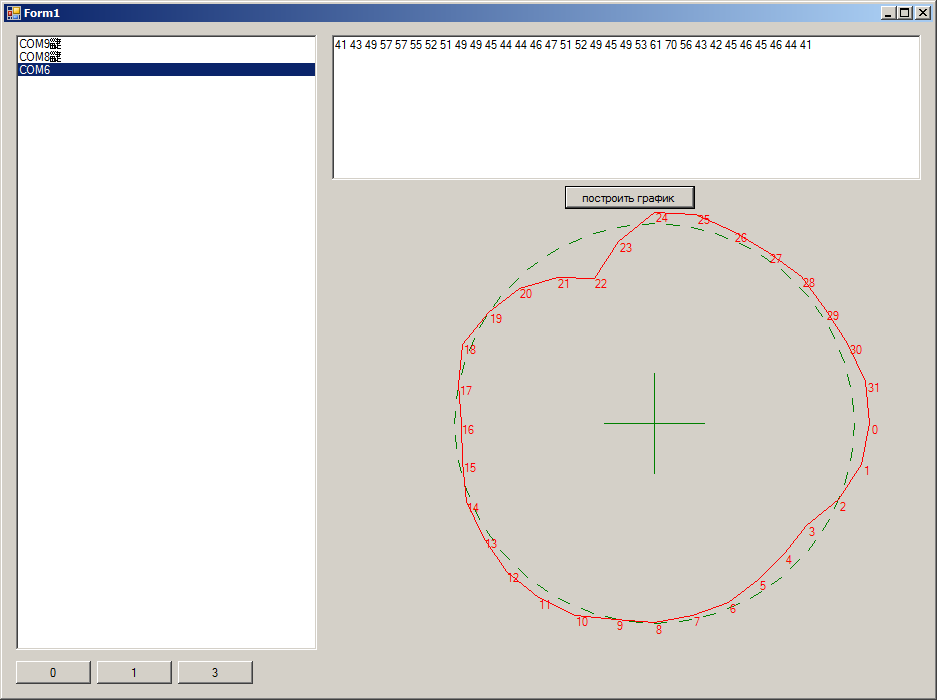 KPDV - die ersten Ergebnisse der Messung der Ovalität eines RadesLange Zeit konnte ich das Problem mit meinem Rad nicht lösen, daher musste ich ein elektronisches Messsystem zusammenbauen.Zunächst eine kleine Erklärung: Was ist die Acht und das Oval des Rades?Acht - Abweichung der Felge zur Seite, wodurch das Rad beim Fahren wackelt:
KPDV - die ersten Ergebnisse der Messung der Ovalität eines RadesLange Zeit konnte ich das Problem mit meinem Rad nicht lösen, daher musste ich ein elektronisches Messsystem zusammenbauen.Zunächst eine kleine Erklärung: Was ist die Acht und das Oval des Rades?Acht - Abweichung der Felge zur Seite, wodurch das Rad beim Fahren wackelt: Oval (oder Ei) - wenn sich die Felge nicht in gleichem Abstand von der Radachse befindet, wodurch das Rad abprallt:
Oval (oder Ei) - wenn sich die Felge nicht in gleichem Abstand von der Radachse befindet, wodurch das Rad abprallt: Und der Buckel und die Grube führen zum Oval des Rades.Im einfachen Fall ist es nicht schwierig, das Rad mit Hilfe eines Schlüssels zum Stricken von Nadeln und eines scharfen Auges einzustellen. Aber ich hatte einen komplizierteren Fall: Nachdem ich auf der Straße in ein Hindernis geflogen war, habe ich die Felge stark gebogen und von Hand begradigt. Ohne zusätzliche Hilfe hat es nicht geklappt. Daher kam die Idee, ein Gerät zusammenzubauen, mit dem Abweichungen von der Norm gemessen werden können.Das erste Problem, das vor mir auftrat, war die Wahl eines sensiblen Elements. Das heißt, wie kann die Rauheit des Rades in ein digitales Signal umgewandelt werden, das der Abweichung entspricht? Viele der verfügbaren Optionen wurden verworfen: Der Schalldistanzdetektor reagiert empfindlich auf die Oberflächentopographie, und Sie müssen an der schmalen Kante des Randes messen. Der Distanzdetektor an der IR-Diode und am IR-Empfänger hat mich aus den gleichen Gründen befürchtet (aber es besteht die Möglichkeit, dass er verwendet werden könnte und sie).Nach einigem Nachdenken erinnerte ich mich an das Funktionsprinzip eines Rastermikroskops - die Sonde bewegt sich entlang der Oberfläche der Probe und entlang der Auslenkung der Sonde und das Relief wird gemessen. Die Idee gefiel mir und das einfachste Schema wurde schnell zusammengestellt:
Und der Buckel und die Grube führen zum Oval des Rades.Im einfachen Fall ist es nicht schwierig, das Rad mit Hilfe eines Schlüssels zum Stricken von Nadeln und eines scharfen Auges einzustellen. Aber ich hatte einen komplizierteren Fall: Nachdem ich auf der Straße in ein Hindernis geflogen war, habe ich die Felge stark gebogen und von Hand begradigt. Ohne zusätzliche Hilfe hat es nicht geklappt. Daher kam die Idee, ein Gerät zusammenzubauen, mit dem Abweichungen von der Norm gemessen werden können.Das erste Problem, das vor mir auftrat, war die Wahl eines sensiblen Elements. Das heißt, wie kann die Rauheit des Rades in ein digitales Signal umgewandelt werden, das der Abweichung entspricht? Viele der verfügbaren Optionen wurden verworfen: Der Schalldistanzdetektor reagiert empfindlich auf die Oberflächentopographie, und Sie müssen an der schmalen Kante des Randes messen. Der Distanzdetektor an der IR-Diode und am IR-Empfänger hat mich aus den gleichen Gründen befürchtet (aber es besteht die Möglichkeit, dass er verwendet werden könnte und sie).Nach einigem Nachdenken erinnerte ich mich an das Funktionsprinzip eines Rastermikroskops - die Sonde bewegt sich entlang der Oberfläche der Probe und entlang der Auslenkung der Sonde und das Relief wird gemessen. Die Idee gefiel mir und das einfachste Schema wurde schnell zusammengestellt: : ( , ), , , , , LN2003, ,Der Messalgorithmus ist der einfachste: Ein Schrittmotor beginnt, den Knopf näher an die Felge zu bringen. Sobald der Knopf gedrückt wird, wird der Schritt in seine Ausgangsposition zurückgebracht, die Anzahl der Schritte wird auf den Computer übertragen, diese Aktion wird für jede Speiche wiederholt. Die Genauigkeit hat sich als ausreichend erwiesen - 10 oder mehr Schritte pro 1 mm, dh Sie können das Rad im Prinzip mit einer Genauigkeit von 0,1 mm einstellen. Ein einfaches Programm verwandelt die von Arduino gesendeten Daten in einen verständlichen Zeitplan, in dem Sie sehen können, welche Speichen gedreht werden müssen, um Probleme zu beheben.Nachdem ich mein Rad vollständig eingestellt hatte, verbesserte sich das Bild merklich:
: ( , ), , , , , LN2003, ,Der Messalgorithmus ist der einfachste: Ein Schrittmotor beginnt, den Knopf näher an die Felge zu bringen. Sobald der Knopf gedrückt wird, wird der Schritt in seine Ausgangsposition zurückgebracht, die Anzahl der Schritte wird auf den Computer übertragen, diese Aktion wird für jede Speiche wiederholt. Die Genauigkeit hat sich als ausreichend erwiesen - 10 oder mehr Schritte pro 1 mm, dh Sie können das Rad im Prinzip mit einer Genauigkeit von 0,1 mm einstellen. Ein einfaches Programm verwandelt die von Arduino gesendeten Daten in einen verständlichen Zeitplan, in dem Sie sehen können, welche Speichen gedreht werden müssen, um Probleme zu beheben.Nachdem ich mein Rad vollständig eingestellt hatte, verbesserte sich das Bild merklich: Das Problem verschwand - das Rad hörte beim Fahren auf zu schlagen. Es war jedoch nicht möglich, die Grube vollständig zu reparieren. Nach dem Unfall gab es eine erhebliche Delle am Rand. Dies ist in der obigen Grafik zu sehen:
Das Problem verschwand - das Rad hörte beim Fahren auf zu schlagen. Es war jedoch nicht möglich, die Grube vollständig zu reparieren. Nach dem Unfall gab es eine erhebliche Delle am Rand. Dies ist in der obigen Grafik zu sehen: Die tatsächliche Abweichung der Felge am Einkerbungspunkt beträgt weniger als einen Millimeter.Client-Quellen Arduino-Quellen
Die tatsächliche Abweichung der Felge am Einkerbungspunkt beträgt weniger als einen Millimeter.Client-Quellen Arduino-Quellen Source: https://habr.com/ru/post/de384385/
All Articles