Watchdog ist ein Gerät zur Erkennung und Behebung von Hardwareproblemen. In der Regel wird hierfür ein Timer verwendet, dessen periodischer Neustart verhindert, dass ein Signal zum Neustart gesendet wird.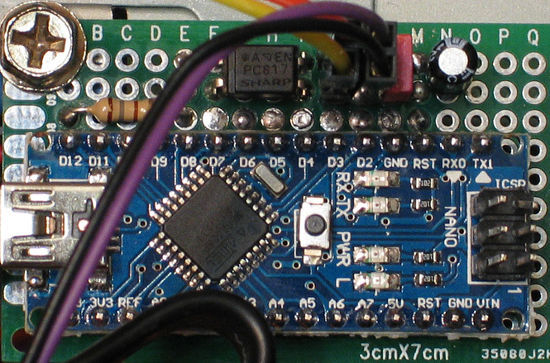 Der Hauptserver auf Gentoo wird von mir hauptsächlich für Experimente verwendet, führt jedoch eine Reihe von Diensten aus, die nach Möglichkeit ohne Unterbrechung verfügbar sein sollten. Leider führen die Konsequenzen einiger Experimente zu Kernel-Panik, 100% CPU-Auslastung und anderen Problemen im ungünstigsten Moment. Die Idee, einen Watchdog hinzuzufügen, hat also lange Aufmerksamkeit erfordert und sich schließlich in diesem Gerät verwirklicht.Nach einer genauen Prüfung der verfügbaren Daten und einer Bewertung der verfügbaren Zeit war der auf der Grundlage des Arduino Nano zusammengestellte Wachhund die beste Option. Eine Liste von Anforderungen wurde ungefähr gleich angezeigt:
Der Hauptserver auf Gentoo wird von mir hauptsächlich für Experimente verwendet, führt jedoch eine Reihe von Diensten aus, die nach Möglichkeit ohne Unterbrechung verfügbar sein sollten. Leider führen die Konsequenzen einiger Experimente zu Kernel-Panik, 100% CPU-Auslastung und anderen Problemen im ungünstigsten Moment. Die Idee, einen Watchdog hinzuzufügen, hat also lange Aufmerksamkeit erfordert und sich schließlich in diesem Gerät verwirklicht.Nach einer genauen Prüfung der verfügbaren Daten und einer Bewertung der verfügbaren Zeit war der auf der Grundlage des Arduino Nano zusammengestellte Wachhund die beste Option. Eine Liste von Anforderungen wurde ungefähr gleich angezeigt:- Starten und Stoppen des Daemons, um mit einem Timer, einem regulären Betriebssystem-Tool (OpenRC), zu arbeiten.
- Eigener Watchdog auf dem Gerät, in ATmega ist es, müssen Sie es verwenden.
- Das Ereignisprotokoll auf dem Gerät zum Beheben des Neustarts und des Timers.
- Synchronisieren Sie die Uhrzeit des Geräts mit dem Host, um die korrekte Uhrzeit im Protokoll aufzuzeichnen.
- Empfangen und Anzeigen des Status des Geräts und seiner Protokolleinträge.
- Löschen des Protokolls und Zurücksetzen des Geräts in den ursprünglichen Zustand.
So wurde das "Mikroskop" gefunden, der "Nagel" ist markiert ... man kann hämmern.Hardware
Basis des Gerätes war der chinesische Klon Arduino Nano, der auf Basis des CH340-Chips hergestellt wurde. Frische Linux-Kernel (getestet seit 3.16) verfügen über einen geeigneten Treiber, sodass das Gerät leicht als serielle USB-Schnittstelle erkannt werden kann.Arduino unerwünschter Neustart
Jedes Mal, wenn das Terminal verbunden ist, wird das Arduino neu gestartet. Der Grund dafür ist, dass das Terminal ein DTR-Signal (Data Terminal Ready) sendet, wodurch das Gerät neu gestartet wird. Somit versetzt die Arduino IDE das Gerät in einen Modus zum Laden von Skizzen.Es gibt verschiedene Möglichkeiten, um das Problem zu lösen, aber nur eine hat funktioniert. Es ist erforderlich, einen 10-µF-Elektrolyten (C1 in der folgenden Abbildung) zwischen den RST- und GND-Kontakten zu installieren. Leider blockiert dies auch das Herunterladen von Skizzen auf das Gerät.Infolgedessen lautet das Schema wie folgt: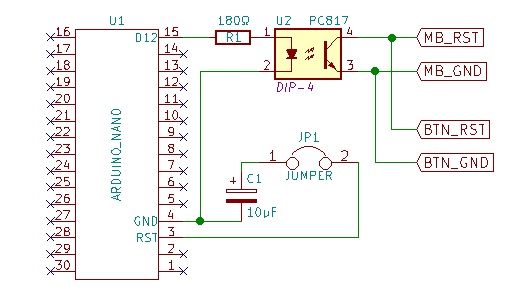 Mit KiCad gezeichnet
Mit KiCad gezeichnetErläuterungen zum Schema- R1 — , PC817: (5V — 1.2V / 0.02A) = 190Ω, 180Ω.
- U2 — Arduino PC. , ( USB ), .
- JP1 — , . .
- 1 — , DTR.
- MB_RST, MB_GND — RESET , RST (GND). , .
- BTN_RST, BTN_GND — , , , , .
Boot-Loop (zyklischer Neustart) bei der Arbeit mit WDT
ATmega-Mikrocontroller verfügen über einen integrierten WDT-Rücksetzmechanismus (WatchDog Timer). Alle Versuche, diese Funktion zu verwenden, führten jedoch zu einer Boot-Schleife, die nur durch Ausschalten der Stromversorgung beendet werden konnte.Nicht lange Suchen ergaben, dass die Bootloader der meisten Arduino-Klone WDT nicht unterstützen. Glücklicherweise wurde dieses Problem im alternativen Optiboot- Bootloader behoben .Um den Bootloader zu flashen, benötigen Sie einen Programmierer, der mit dem SPI-Protokoll arbeiten kann. Es ist auch wünschenswert, dass die Arduino IDE dieses Gerät „persönlich“ kennt. In diesem Fall ist ein anderes Arduino ideal.Wenn wir Arduino UNO als Programmierer und die neueste Version von Arduino IDE v1.6.5 verwenden, lautet der Algorithmus wie folgt:- boards-1.6.txt optiboot hardware/arduino/avr/boards.txt Arduino IDE.
- Arduino Uno, File → Examples → ArduinoISP.
- Arduino Nano :
| Arduino Uno () | Arduino Nano (ICSP ) |
|---|
| 5V → Vcc | | GND → GND | | D11 → MOSI | | D12 → MISO | | D13 → SCK | | D10 → Reset |
| | Pin1 (MISO) ← D12 | Pin2 (Vcc) ← 5V | | Pin3 (SCK) ← D13 | Pin4 (MOSI) ← D11 | | Pin5 (Reset) ← D10 | Pin6 (GND) ← GND |
|
- Arduino IDE Tools :
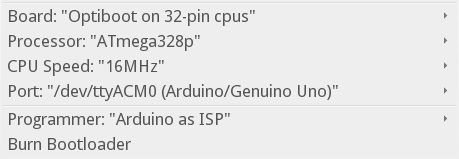
- Tools → Burn Bootloader , .
, Arduino Nano - —
Board: Optiboot on 32 pin cpus,
Processor: ATmega328p,
CPU Speed: 16MHz.
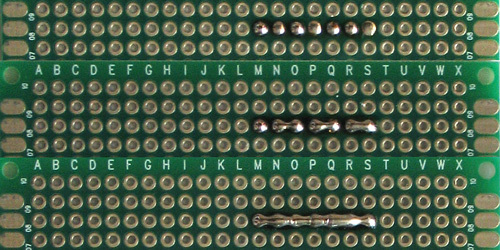
Als nächstes müssen Sie alles löten, damit es wie ein Stück aussieht.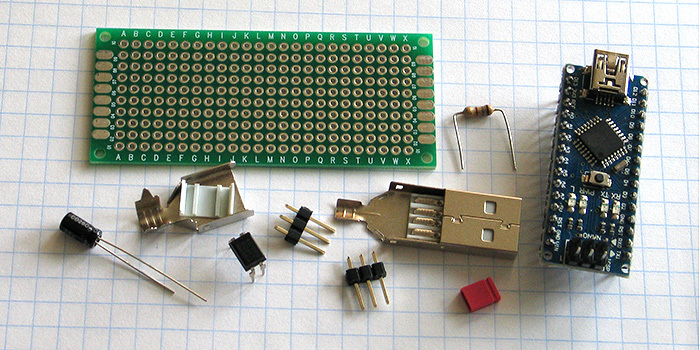 Hier brauchte ich einen USB-Stecker, da ich ein Mini-ITX-Motherboard mit nur einem Anschluss für ein Paar USB 2.0 habe, die auf der Vorderseite benötigt werden, und es gab nichts, was an das USB 3.0-Pad angeschlossen werden konnte. Wenn möglich, sollten solche Geräte direkt an das Motherboard angeschlossen werden, damit die Drähte nicht herausragen.Das Löten verursacht in der Regel keine Probleme, aber in diesem Fall wird ein Steckbrett verwendet, das seine eigenen Besonderheiten hat.
Hier brauchte ich einen USB-Stecker, da ich ein Mini-ITX-Motherboard mit nur einem Anschluss für ein Paar USB 2.0 habe, die auf der Vorderseite benötigt werden, und es gab nichts, was an das USB 3.0-Pad angeschlossen werden konnte. Wenn möglich, sollten solche Geräte direkt an das Motherboard angeschlossen werden, damit die Drähte nicht herausragen.Das Löten verursacht in der Regel keine Probleme, aber in diesem Fall wird ein Steckbrett verwendet, das seine eigenen Besonderheiten hat.So löten Sie Spuren auf einem Steckbrett( , ). .
:
Ergebnis: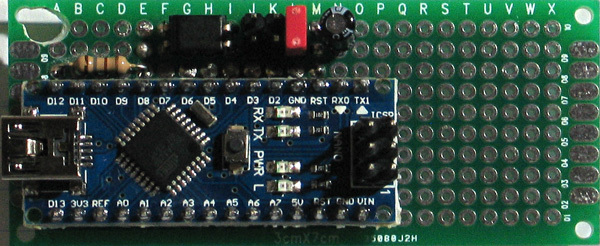
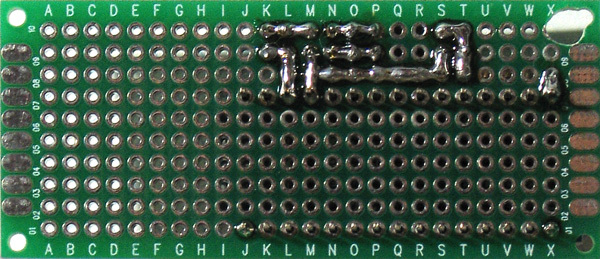 Es scheint, dass einige Kontakte schlecht verlötet sind, aber dies ist nur ein Flussmittel. Der Lötmittelverbrauch auf dem Steckbrett ist ziemlich hoch, so dass alles, was möglich ist, hier mit einem Flussmittel verschmiert wird. In der Tat ist dies ein gutes Beispiel dafür, wie Sie das Produkt nach dem Löten nicht verlassen müssen. Das Flussmittel muss abgewaschen werden, da sonst Probleme mit der Korrosion der Verbindungen auftreten können. Ich werde hinzufügen und waschen gehen ... Das ist besser:
Es scheint, dass einige Kontakte schlecht verlötet sind, aber dies ist nur ein Flussmittel. Der Lötmittelverbrauch auf dem Steckbrett ist ziemlich hoch, so dass alles, was möglich ist, hier mit einem Flussmittel verschmiert wird. In der Tat ist dies ein gutes Beispiel dafür, wie Sie das Produkt nach dem Löten nicht verlassen müssen. Das Flussmittel muss abgewaschen werden, da sonst Probleme mit der Korrosion der Verbindungen auftreten können. Ich werde hinzufügen und waschen gehen ... Das ist besser: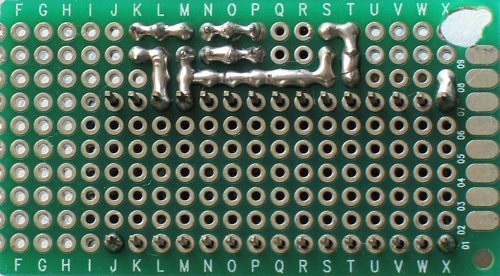
Software-Teil
Objektiv gesehen ist der Code dieses Projekts nicht von besonderem Interesse. Die einleitenden sind alles andere als extrem, und die Architektur wird in einem Satz beschrieben: Senden Sie einen Befehl - warten Sie auf eine Antwort. Der Ordnung halber werde ich hier die Hauptfunktionalität beschreiben und kurz auf die aus meiner Sicht interessantesten Punkte eingehen.Der gesamte Code wird auf GitHub veröffentlicht. Wenn Sie also mit Bash und C / C ++ (im Kontext von Arduino-Skizzen) vertraut sind, kann das Lesen an dieser Stelle abgeschlossen werden. Wenn Sie interessiert sind, finden Sie das fertige Ergebnis hier .Watchdog-Verbindung
Wenn Sie Watchdog verbinden, wird eine Gerätedatei mit der Seriennummer erstellt. Wenn das System über andere ttyUSB-Geräte verfügt (in meinem Fall ein Modem), liegt ein Problem mit der Nummerierung vor. Um das Gerät eindeutig zu identifizieren, müssen Sie einen Symlink mit einem eindeutigen Namen erstellen. Hierfür ist udev konzipiert, das wahrscheinlich bereits im System vorhanden ist.Zuerst müssen Sie den verbundenen Watchdog visuell finden, indem Sie beispielsweise die Systemprotokolldatei anzeigen. Wenn Sie dann / dev / ttyUSB0 durch das gewünschte Gerät ersetzen, schreiben Sie in das Terminal:udevadm info -a -p "$(udevadm info -q path -n /dev/ttyUSB0)"
Ausgabebeispiel looking at device '/devices/pci0000:00/0000:00:14.0/usb1/1-1/1-1.4/1-1.4:1.0/ttyUSB0/tty/ttyUSB0':
KERNEL=="ttyUSB0"
SUBSYSTEM=="tty"
...
looking at parent device '/devices/pci0000:00/0000:00:14.0/usb1/1-1/1-1.4/1-1.4:1.0/ttyUSB0':
KERNELS=="ttyUSB0"
SUBSYSTEMS=="usb-serial"
DRIVERS=="ch341-uart"
...
looking at parent device '/devices/pci0000:00/0000:00:14.0/usb1/1-1/1-1.4/1-1.4:1.0':
...
looking at parent device '/devices/pci0000:00/0000:00:14.0/usb1/1-1/1-1.4':
SUBSYSTEMS=="usb"
DRIVERS=="usb"
ATTRS{idVendor}=="1a86"
ATTRS{idProduct}=="7523"
ATTRS{product}=="USB2.0-Serial"
...
In diesem Fall sieht die Regel folgendermaßen aus:ACTION=="add", KERNEL=="ttyUSB[0-9]*", SUBSYSTEM=="tty", SUBSYSTEMS=="usb", ATTRS{idVendor}=="1a86", ATTRS{idProduct}=="7523", SYMLINK+="ttyrst-watchdog"
Sie müssen es in einer separaten Datei im Verzeichnis /etc/udev/rules.d ablegen , z. B. 51-ttyrst-watchdog.rules, und udev anweisen , die Regeln neu zu laden:udevadm control --reload-rules
Ab diesem Moment wird beim Verbinden des Watchdogs ein Link / dev / ttyrst- Watchdog auf dem gewünschten Gerät erstellt, der später verwendet wird.Bash-Skript (ttyrst-watchdog.sh)
Die Kommunikation mit dem Watchdog erfolgt mit einer Geschwindigkeit von 9600 Baud. Arduino arbeitet problemlos mit Terminals mit hoher Geschwindigkeit, aber Befehle zum Arbeiten mit Text (Katze, Echo usw.) empfangen und senden nur Müll. Es ist möglich, dass dies nur ein Merkmal meiner Kopie des Arduino Nano ist.Für den Neustartzyklus des Hauptzeitgebers und für Befehlszeilenfunktionen wird ein Skript verwendet. Der Grund dafür ist, dass beide Komponenten eine gemeinsame Ressource verwenden - die Gerätedatei - und dass ein synchroner Zugriff darauf erforderlich ist.Die Synchronisation besteht im Wesentlichen aus einer Warteschleife:while fuser ${DEVICE} >/dev/null 2>&1; do true; done
und erfassen Sie das Gerät für die erforderliche Zeit:cat <${DEVICE}
Offensichtlich unterliegt ein solches Schema einer Rennbedingung. Sie können dies auf erwachsene Weise behandeln (z. B. um eine Nachrichtenwarteschlange zu organisieren). In diesem Fall reicht es jedoch aus, die Zeitüberschreitungen korrekt festzulegen, um sicherzustellen, dass Sie das Ergebnis in einer akzeptablen Zeit erhalten. Tatsächlich arbeitet das gesamte Skript mit Zeitüberschreitungen.Die Dämonisierung (läuft im Hintergrund) wird mit dem OpenRC-Paket durchgeführt. Es wird davon ausgegangen, dass sich dieses Skript in der Datei /usr/local/bin/ttyrst-watchdog.sh befindet und das OpenRC-Skript in /etc/init.d/ttyrst-watchdog .Wenn der Dämon stoppt, ist die korrekte Deaktivierung des Watchdogs erforderlich. Zu diesem Zweck legt das Skript den Signalhandler fest, der abgeschlossen werden muss:trap deactivate SIGINT SIGTERM
Und hier taucht ein Problem auf - OpenRC kann den Daemon nicht stoppen, oder besser gesagt, aber nicht oft.Tatsache ist, dass der Befehl kill ein Signal an das Skript sendet und das Schlafprogramm, mit dem das Skript angehalten wird, in einem anderen Prozess ausgeführt wird und das Signal nicht empfängt. Infolgedessen wird die Deaktivierungsfunktion erst nach Abschluss des zu langen Ruhezustands gestartet.Die Lösung besteht darin, den Ruhezustand im Hintergrund zu starten und zu warten, bis der Vorgang im Skript abgeschlossen ist:sleep ${SLEEP_TIME} & wait $!
Grundkonstanten:WATCHDOG_ACTIVE - YES bzw. NO senden ein Signal zum Neustart, wenn der Timer ausgelöst wird oder nicht.WATCHDOG_TIMER - Zeit in Sekunden, für die der Timer eingestellt ist.SLEEP_TIME - Zeit in Sekunden, nach der der Timer neu gestartet werden muss. Es sollte viel kleiner als WATCHDOG_TIMER sein, aber nicht sehr klein, um das System und das Gerät nicht übermäßig zu belasten. Bei aktuellen Zeitüberschreitungen beträgt ein angemessenes Minimum ungefähr 5 Sekunden.DEFAULT_LOG_LINES - Die Anzahl der zuletzt vom Standardprotokollbefehl zurückgegebenen Geräteprotokolleinträge.Skriptbefehle:Start- Start des Neustartzyklus des Haupttimers. Sie können der Funktion is_alive zusätzlichen Bestätigungscode hinzufügen, um beispielsweise die Möglichkeit einer Verbindung über ssh zu prüfen.status - Zeigt den Status des Geräts an.Zurücksetzen - Zurücksetzen des EEPROM (Protokolldaten) und Neustarten des Geräts, um den ursprünglichen Zustand des Watchdogs wiederherzustellen.log <Anzahl der Einträge> - Zeigt die angegebene Anzahl der letzten Protokolleinträge an.Arduino-Skizze (ttyrst-watchdog.ino)
Um erfolgreich die Skizze kompilieren, müssen Sie eine Drittanbieter - Zeitbibliothek , die für die Zeitsynchronisation erforderlich ist.Eine Skizze besteht aus zwei Dateien. Dies liegt daran, dass die Arduino-IDE die in der Hauptdatei deklarierten Strukturen (struct) nicht akzeptiert, sondern in eine externe Header-Datei verschoben werden muss. Außerdem ist das Schlüsselwort typedef nicht erforderlich, um eine Struktur zu deklarieren. Es ist wahrscheinlich sogar schädlich. Nachdem ich die Standardoptionen überprüft habe, konnte ich die entsprechende Syntax nicht finden. Der Rest ist mehr oder weniger Standard C ++.Die Funktionen wdt_enable und wdt_reset arbeiten mit dem im Mikrocontroller integrierten Watchdog. Nach dem Initialisieren des WDT ist es wichtig, ihn in der Hauptschleife und in den Schleifen aller längeren Vorgänge zurückzusetzen.Protokolleinträge werden in den nichtflüchtigen EEPROM-Speicher geschrieben. Die verfügbare Größe kann in logrecord.h angegeben werden. In diesem Fall ist dies 1024. Das Protokoll wird in Form eines Rings erstellt. Das Trennzeichen ist eine Struktur mit Nullwerten. Die maximale Anzahl von Einträgen für 1 KiB-EEPROM beträgt 203.Ein Datensatz über das Laden des Geräts wird erst nach der Zeitsynchronisation in das Protokoll aufgenommen. Die Synchronisierung wird gleichzeitig mit dem Neustart des Timers und vor der Ausführung eines Befehls während der Geräteinitialisierung durchgeführt. Auf andere Weise ist es nicht möglich, die korrekte Zeit mit diesem Ereignis zu vergleichen, und die Informationen zum Neustart des Geräts, isoliert vom Arbeitsdämon, sind nicht sehr interessant.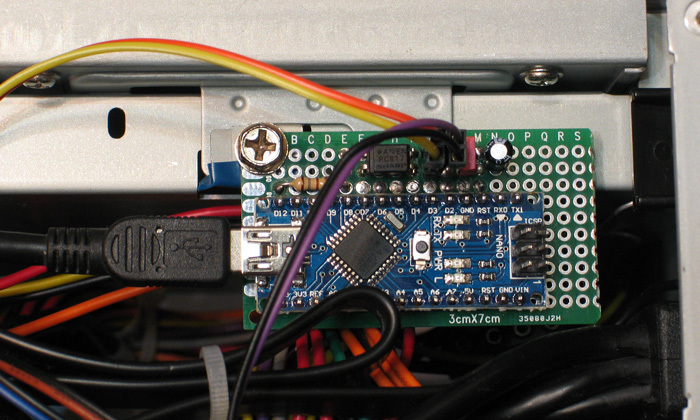 Das ist alles, danke fürs Zuschauen!Projektquelldateien befinden sich auf GitHub
Das ist alles, danke fürs Zuschauen!Projektquelldateien befinden sich auf GitHub