 In diesem Jahr haben wir an der CanSat-Meisterschaft für den Start von Wettersonden teilgenommen und uns ein ehrgeiziges Ziel gesetzt: die Sonde in ein vollständiges UAV zu verwandeln und dabei die Regeln des Wettbewerbs einzuhalten
In diesem Jahr haben wir an der CanSat-Meisterschaft für den Start von Wettersonden teilgenommen und uns ein ehrgeiziges Ziel gesetzt: die Sonde in ein vollständiges UAV zu verwandeln und dabei die Regeln des Wettbewerbs einzuhaltenDieser Beitrag enthält:
1) Beschreibung des Geräts2) Zweck seiner Erstellung3) Montageprozess4) Flugtests5) EndstartBeschreibung
Das Gerät ist ein Quadrocopter mit zwei Modi: Im passiven Zustand hat es die Form eines Zylinders, der im Körper der Rakete platziert wird, in dem die aktiven Strahlen geöffnet werden, Motoren gestartet werden, die Hauptmission beginnt, die darin besteht, Daten über den Zustand der Erdoberfläche und -atmosphäre zu sammeln, autonomer Flug gemäß Sollwerte (mit der Fähigkeit, die Steuerung des Piloten abzufangen) und zur Basis zurückkehren.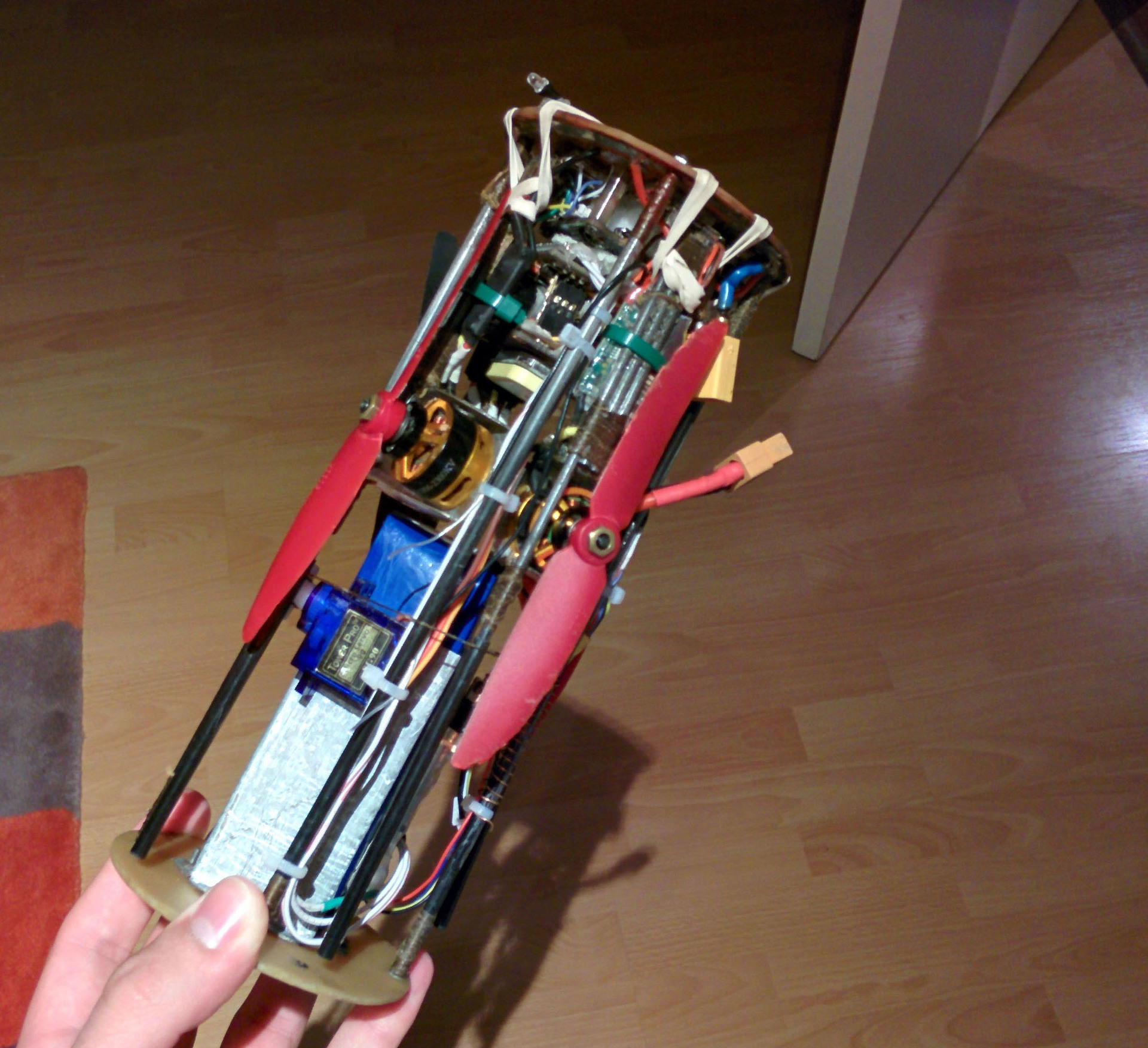 Gefalteter Zustand
Gefalteter ZustandEigenschaften:
Flugzeit: 6-12 MinutenHorizontale Flugreichweite: 4 kmVertikale Flugreichweite: 2 kmÜbergangszeit im aktiven Modus: 3 SekundenGewicht: 600 gInstallierte Sensoren: Barometer, Beschleunigungsmesser, Gyroskop, Magnetometer, GPS, InfrarotkameraDas Projekt wurde erstellt Teilnahme an der Hauptliga der CanSat-Meisterschaft, die von der SINP MSU abgehalten wird.Was ist Kansat?, . («»), , .
— , 1-4 , , . .
, , . , , . .
3 :
— 0.5 , 350 , , , , ATmega 128, RXQ2 (433 ). 500.
— , . : 200, . 1 .
— (30 ) .
Mein Team hatte Erfahrung mit der Teilnahme an der Meisterschaft: Letztes Jahr waren wir in der regulären Liga. Anstelle eines vorgefertigten Designers wurde beschlossen, Ihre eigenen zu erstellen und dabei die Hauptkomponenten aus dem Basissatz beizubehalten, damit die Regeln nicht tatsächlich verletzt wurden, sondern wir die Organisatoren benachrichtigten. Wir haben es geschafft, die Boardgröße aufgrund des doppelseitigen Drucks um das Dreifache zu reduzieren, so dass wir theoretisch an der amerikanischen Meisterschaft teilnehmen könnten, aber aufgrund der Eigenproduktion arbeitete das Board mit einigen Unterbrechungen, die es uns nicht ermöglichten, mit einer Rakete zu starten.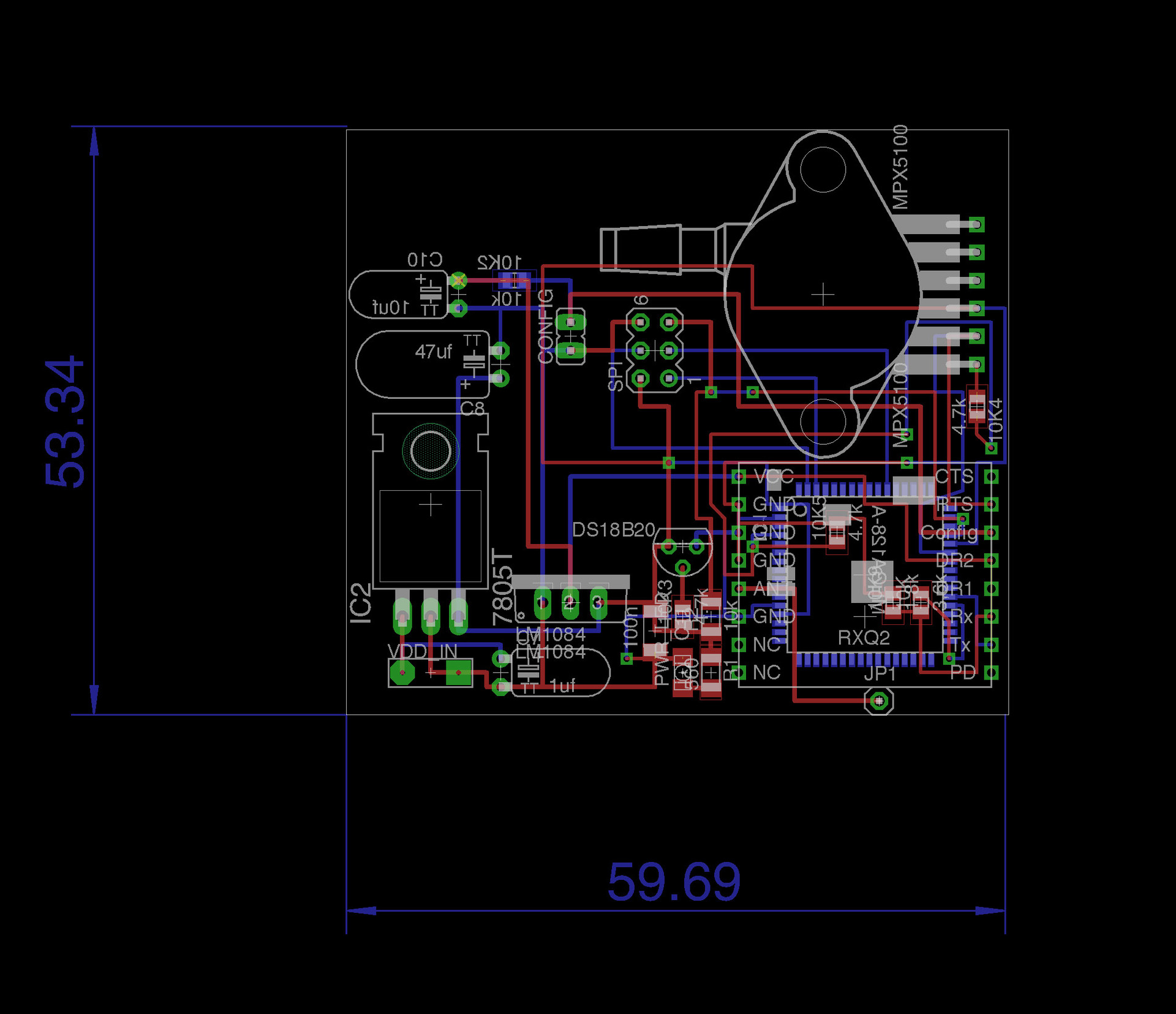 HauptplatineUnsere zusätzliche Mission war es, die Erde im Infrarotbereich mit einer 16x4-Pixel-Kamera und den sichtbaren Bereich mit weiterer Überlagerung aufzunehmen. Wie die Praxis gezeigt hat, war das Projekt ohnehin nutzlos, da die Sonde aufgrund des Fallschirms ständig schwankte, die Blenden- und Aufnahmegeschwindigkeit fehlte und alle Videos verschwommen waren.
HauptplatineUnsere zusätzliche Mission war es, die Erde im Infrarotbereich mit einer 16x4-Pixel-Kamera und den sichtbaren Bereich mit weiterer Überlagerung aufzunehmen. Wie die Praxis gezeigt hat, war das Projekt ohnehin nutzlos, da die Sonde aufgrund des Fallschirms ständig schwankte, die Blenden- und Aufnahmegeschwindigkeit fehlte und alle Videos verschwommen waren.Beispiel für ein solches Video
( 0:35)
. 2-
Weitere Details darüber, wie wir alle pleite waren1) - , .
2) , - , . , .
3) 18 / .
4) , , .
, 4 , .
Erwähnenswert ist auch die ältere Mannschaft, die an einer noch früheren Meisterschaft teilgenommen hat. Letztes Jahr haben sie in der Major League teilgenommen. Das Hauptmerkmal ist die Verwendung eines Laufrads anstelle eines Fallschirms, aber aufgrund der Nichtverfügbarkeit des Programmcodes und einer provisorischen Karte konnten sie auch keine Leistung erbringen.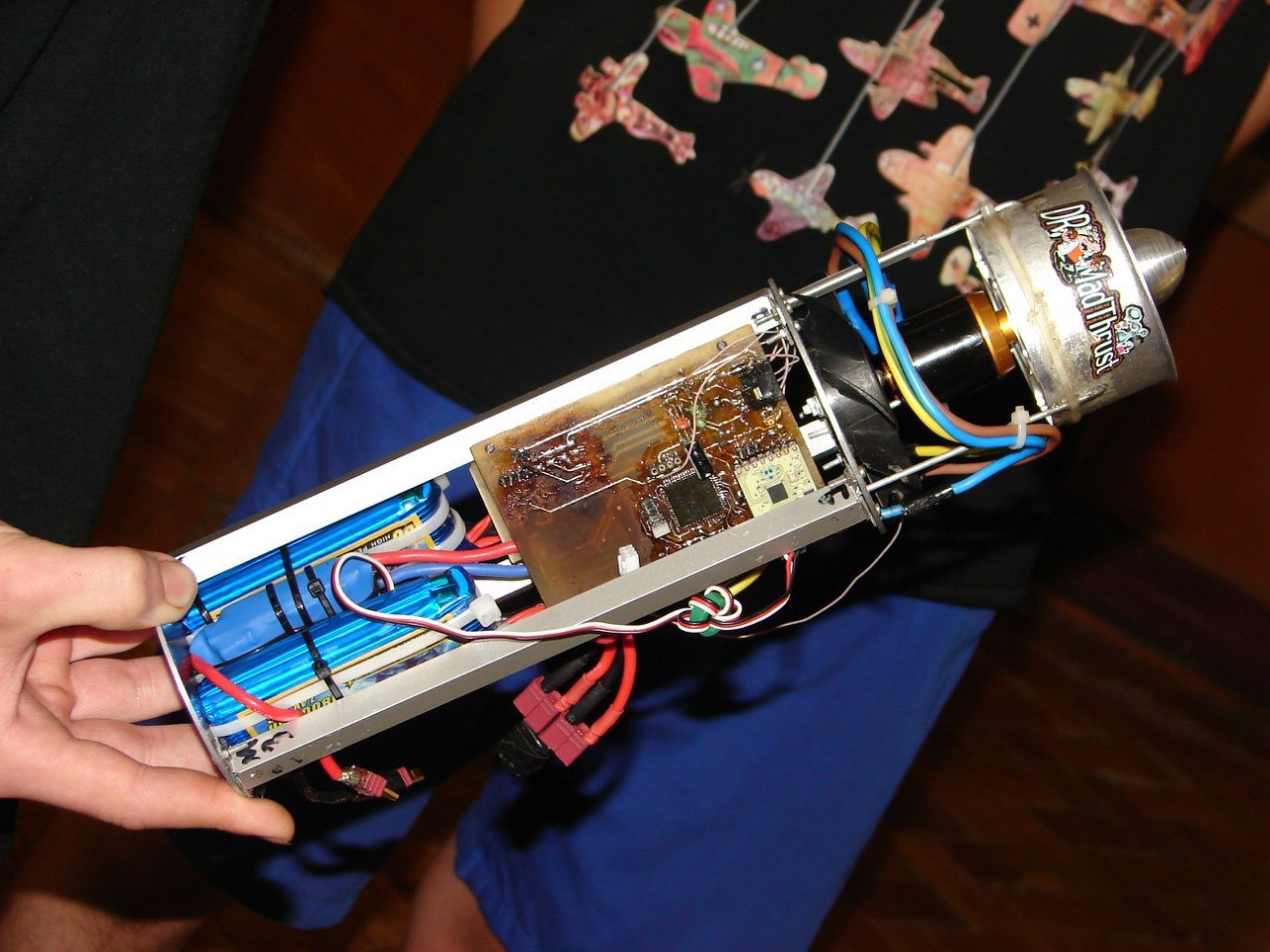 Laufradsonde
LaufradsondeIhre Geschichte
, , . , GPS GSM .
. , .
, , .
In diesem Jahr wurde beschlossen, das Team zusammenzulegen. Am Ende beschloss mein Team, die Idee eines kontrollierten Abstiegs zu entwickeln, nämlich einen Quadrocopter zu entwickeln, der in eine Rakete passt.Schöpfungsprozess
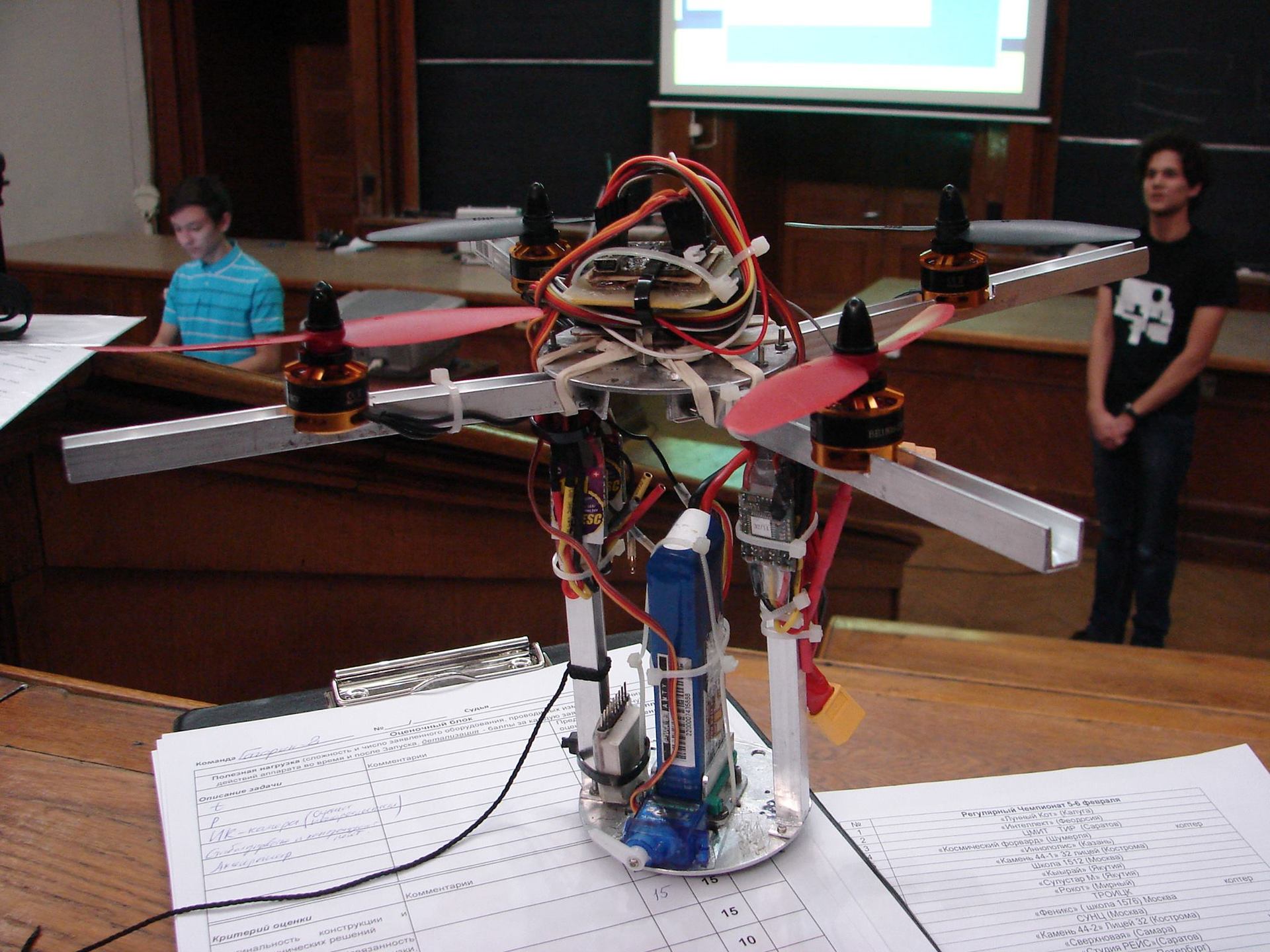 PrototypDer erste Prototyp, den wir eine Woche vor der Wintersitzung erstellt haben, um die Jury von der Realität dieses Projekts zu überzeugen. Der Rahmen bestand aus Aluminium, auch Balken. Als Fluglotse habe ich MultiWii verwendet, sodass dieser Prototyp die Strahlen nur auf Befehl des Bedieners sichtbar machen und im manuellen Modus fliegen konnte.
PrototypDer erste Prototyp, den wir eine Woche vor der Wintersitzung erstellt haben, um die Jury von der Realität dieses Projekts zu überzeugen. Der Rahmen bestand aus Aluminium, auch Balken. Als Fluglotse habe ich MultiWii verwendet, sodass dieser Prototyp die Strahlen nur auf Befehl des Bedieners sichtbar machen und im manuellen Modus fliegen konnte.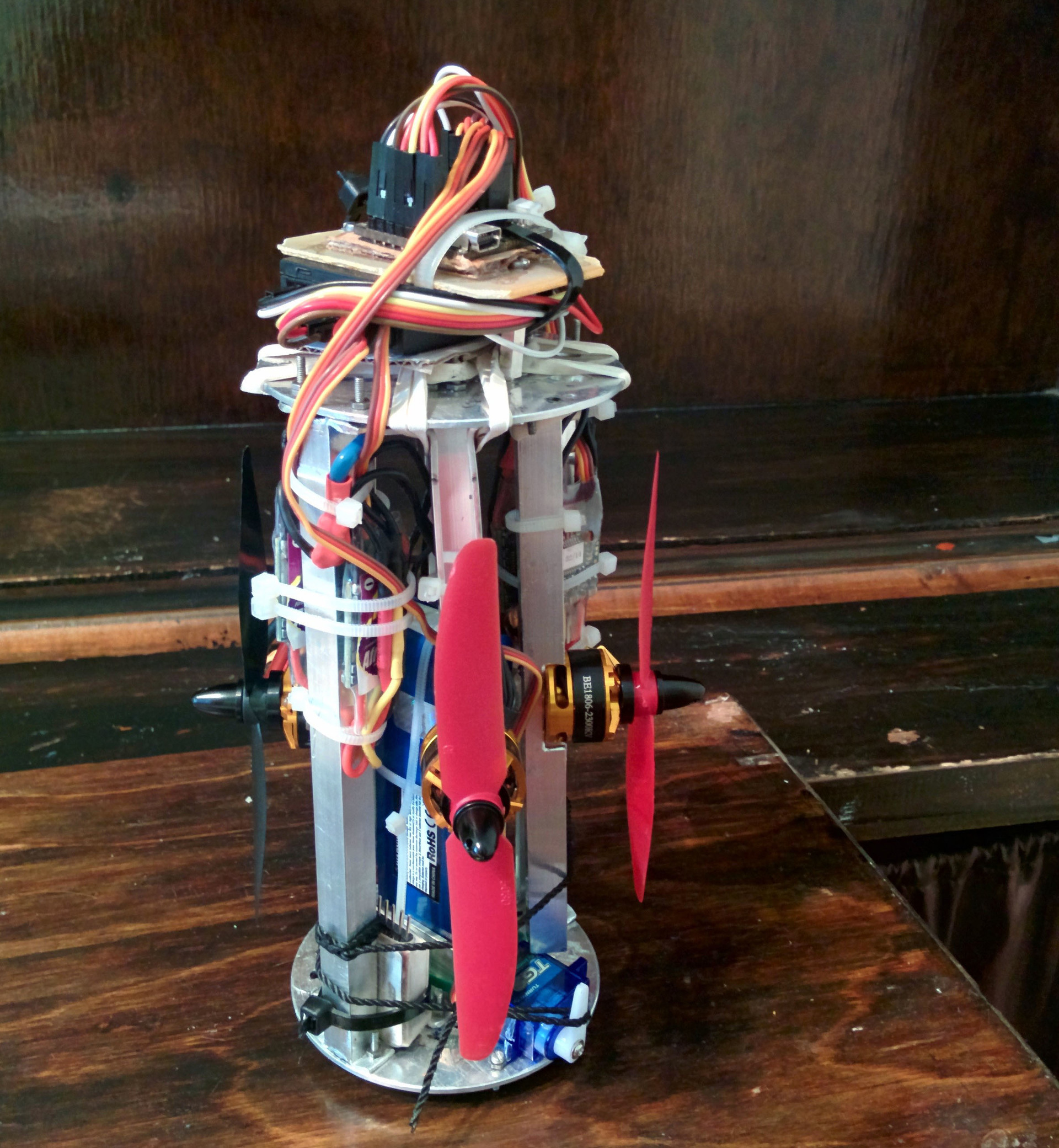 Die Jury schätzte das Projekt, wir belegten den ersten Platz und jetzt konnten wir mit der Montage beginnen. Übrigens, kurz vor der Präsentation während des Testfluges ist unser Motor durchgebrannt, wir haben ihn gegen einen Ersatzmotor ausgetauscht. Während der Präsentation brannte der Motor erneut aus. Beide waren an den gleichen Drehzahlregler angeschlossen, wir haben ihn nicht mehr benutzt.Leider verschwand die Finanzierungsquelle, es schien näher am Bestehen der Prüfung zu liegen, hier konnte ich nicht teilnehmen. Nachdem wir die Prüfungen bestanden hatten, bestellten wir dringend die erforderlichen Teile per Expressversand und begannen mit Carbonrohren, Kevlar-Gewinden und Epoxidharz bewaffnet mit der Montage des Rahmens und der Träger. Im Laufe aller zwei Wochen hat mich die Idee, dass wir keine Zeit hatten, nicht verlassen, aber die Bahntickets wurden gekauft, es gab kein Zurück.
Die Jury schätzte das Projekt, wir belegten den ersten Platz und jetzt konnten wir mit der Montage beginnen. Übrigens, kurz vor der Präsentation während des Testfluges ist unser Motor durchgebrannt, wir haben ihn gegen einen Ersatzmotor ausgetauscht. Während der Präsentation brannte der Motor erneut aus. Beide waren an den gleichen Drehzahlregler angeschlossen, wir haben ihn nicht mehr benutzt.Leider verschwand die Finanzierungsquelle, es schien näher am Bestehen der Prüfung zu liegen, hier konnte ich nicht teilnehmen. Nachdem wir die Prüfungen bestanden hatten, bestellten wir dringend die erforderlichen Teile per Expressversand und begannen mit Carbonrohren, Kevlar-Gewinden und Epoxidharz bewaffnet mit der Montage des Rahmens und der Träger. Im Laufe aller zwei Wochen hat mich die Idee, dass wir keine Zeit hatten, nicht verlassen, aber die Bahntickets wurden gekauft, es gab kein Zurück.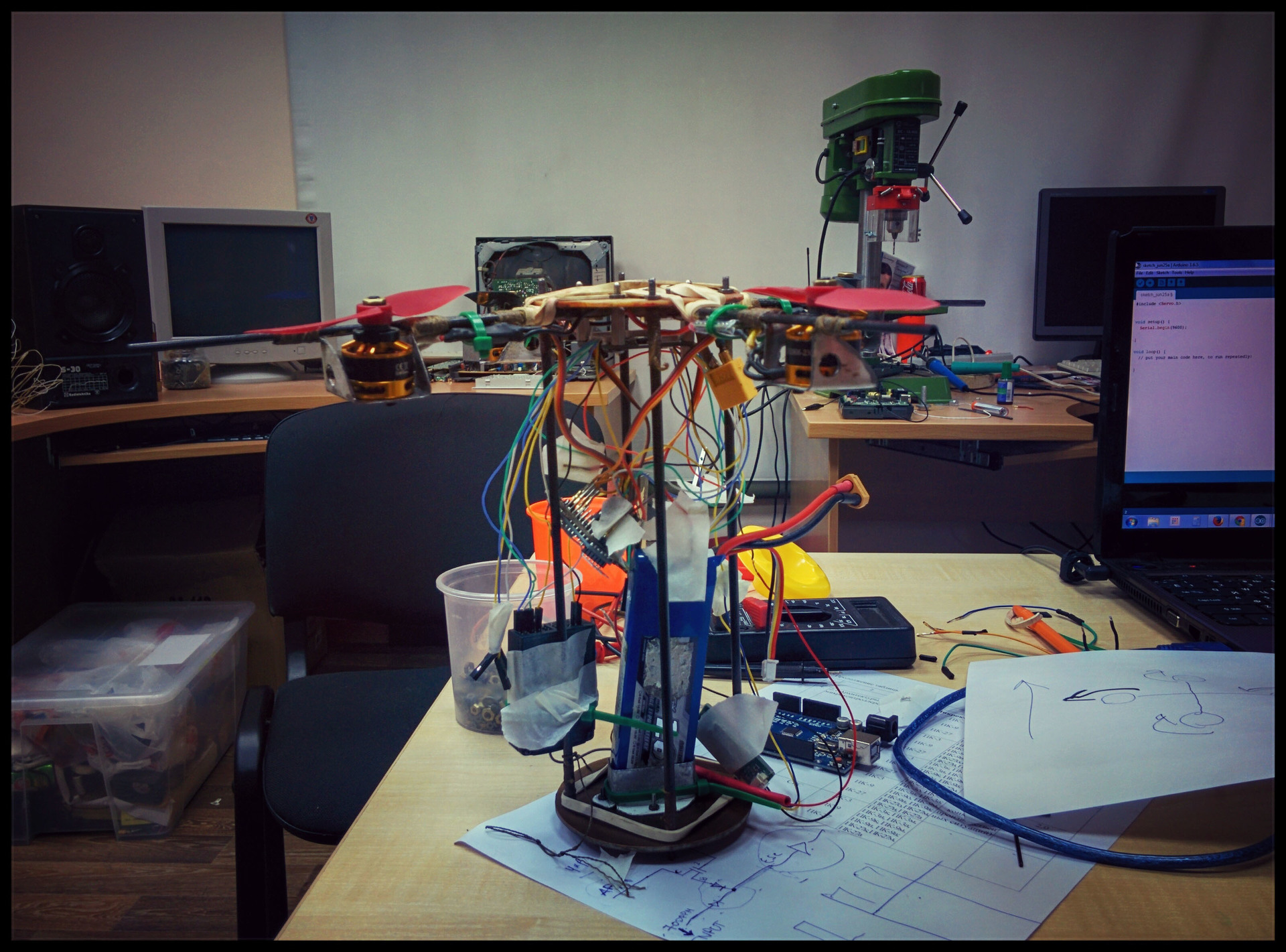 Debuggen der endgültigen VersionWir mussten nicht über ernsthafte Flugtests sprechen, wir hatten nur ein funktionierendes Modell, dessen Verlust einen Misserfolg bedeutete.Der erste Start war im Gebäude, es war erfolgreich, der zweite Start auf der Straße im manuellen Modus war erfolgreich, der dritte Start im GPS-Hold-Modus war fast tödlich. Aufgrund eines falsch eingestellten Magnetometers gehorchte die Sonde nicht mehr den Befehlen und flog zum nächsten See, da die Wand des Hostels ihn stoppte. Wir haben 2 Balken und 2 Propeller verloren, der Rahmen hat überlebt. Wir hatten Ersatzbalken, so dass die Leistung in ein paar Stunden wiederhergestellt wurde. Nach einer langen Einrichtung des Magnetometers gab es einen weiteren Versuch - der Start war erfolgreich.Es blieb die Rückkehr zur Basis zu überprüfen. Dieser Tag war gerade bei meinem Abschluss, aber es gab nichts zu tun, wir gingen aufs Feld, versuchten nach Hause zurückzukehren - erfolgreich. Der Freude waren keine Grenzen gesetzt, am nächsten Tag gingen wir zum Start nach Moskau, aber der Code für die automatische Offenlegung wurde immer noch nicht geschrieben, und anscheinend haben wir den Fehler des letzten Jahres wiederholt.Test Rückkehr zur BasisIch werde Ihnen mehr über das automatische Offenlegungssystem erzählen.Es besteht aus einem Servoantrieb, einem Seil, Gummibändern, einer Steuerplatine und einem Fotodetektor.
Debuggen der endgültigen VersionWir mussten nicht über ernsthafte Flugtests sprechen, wir hatten nur ein funktionierendes Modell, dessen Verlust einen Misserfolg bedeutete.Der erste Start war im Gebäude, es war erfolgreich, der zweite Start auf der Straße im manuellen Modus war erfolgreich, der dritte Start im GPS-Hold-Modus war fast tödlich. Aufgrund eines falsch eingestellten Magnetometers gehorchte die Sonde nicht mehr den Befehlen und flog zum nächsten See, da die Wand des Hostels ihn stoppte. Wir haben 2 Balken und 2 Propeller verloren, der Rahmen hat überlebt. Wir hatten Ersatzbalken, so dass die Leistung in ein paar Stunden wiederhergestellt wurde. Nach einer langen Einrichtung des Magnetometers gab es einen weiteren Versuch - der Start war erfolgreich.Es blieb die Rückkehr zur Basis zu überprüfen. Dieser Tag war gerade bei meinem Abschluss, aber es gab nichts zu tun, wir gingen aufs Feld, versuchten nach Hause zurückzukehren - erfolgreich. Der Freude waren keine Grenzen gesetzt, am nächsten Tag gingen wir zum Start nach Moskau, aber der Code für die automatische Offenlegung wurde immer noch nicht geschrieben, und anscheinend haben wir den Fehler des letzten Jahres wiederholt.Test Rückkehr zur BasisIch werde Ihnen mehr über das automatische Offenlegungssystem erzählen.Es besteht aus einem Servoantrieb, einem Seil, Gummibändern, einer Steuerplatine und einem Fotodetektor. Die Sonde ist in eine Rakete eingetaucht, dort ist es dunkel, mit Hilfe des reparierten MK-Fotodetektors geht das System in den Standby-Modus. Die Rakete startet, die Trennung, der Lichtfluss nimmt zu, das Servo gibt das Seil frei, das die Strahlen hält (ihr normaler Zustand ist auf die geöffneten Gummibänder zurückzuführen), die Strahlen öffnen sich, nach 3 Sekunden gibt das Board den Geschwindigkeitsreglern Zugang zum Bordflugmikrocontroller, der Flug zum ersten Punkt beginnt, Weiterer Flug nach Hause.Das Disclosure Management Board steuert auch die IR-Kamera. Nachdem wir die Verarbeitung der Rohdaten vom Sensor auf den Computer übertragen hatten, stieg die Frequenz von 18 fps auf 30 fps (Daten werden auf microSD aufgezeichnet). Wir mussten hart arbeiten, um die Motoren zu steuern: Sie können nicht einfach zuerst die Verbindung zwischen dem MK und den Drehzahlreglern trennen. und dann wiederherstellen - sie werden nicht gestartet. Zuerst müssen Sie ein Signal zur Initialisierung geben und erst dann Zugriff auf den Flug MK. Daher musste ich ein Schema erstellen, mit dem sowohl vom Flugmikron als auch vom Manager aus auf die Regler zugegriffen werden kann.Wir gehen reibungslos zur Endphase über -
Die Sonde ist in eine Rakete eingetaucht, dort ist es dunkel, mit Hilfe des reparierten MK-Fotodetektors geht das System in den Standby-Modus. Die Rakete startet, die Trennung, der Lichtfluss nimmt zu, das Servo gibt das Seil frei, das die Strahlen hält (ihr normaler Zustand ist auf die geöffneten Gummibänder zurückzuführen), die Strahlen öffnen sich, nach 3 Sekunden gibt das Board den Geschwindigkeitsreglern Zugang zum Bordflugmikrocontroller, der Flug zum ersten Punkt beginnt, Weiterer Flug nach Hause.Das Disclosure Management Board steuert auch die IR-Kamera. Nachdem wir die Verarbeitung der Rohdaten vom Sensor auf den Computer übertragen hatten, stieg die Frequenz von 18 fps auf 30 fps (Daten werden auf microSD aufgezeichnet). Wir mussten hart arbeiten, um die Motoren zu steuern: Sie können nicht einfach zuerst die Verbindung zwischen dem MK und den Drehzahlreglern trennen. und dann wiederherstellen - sie werden nicht gestartet. Zuerst müssen Sie ein Signal zur Initialisierung geben und erst dann Zugriff auf den Flug MK. Daher musste ich ein Schema erstellen, mit dem sowohl vom Flugmikron als auch vom Manager aus auf die Regler zugegriffen werden kann.Wir gehen reibungslos zur Endphase über -startet
Und es scheint, dass in der Nacht vor dem Start alles fertig ist, wir haben den Flug sogar nach Punkten getestet, er fliegt wirklich, aber niemand hat daran gedacht, eine vollständige Simulation durchzuführen. Infolgedessen zeigte der Bus, der uns zum Startfeld fuhr, dass der Code nicht richtig funktionierte. Ich habe einen Freund eingeladen, den Hauptzyklus zu kommentieren, in dem die Arbeit aller zusätzlichen Systeme beginnt, die Wurzel des Problems zu bestimmen. Wir haben versucht, den Fehler während der verbleibenden Zeit vor dem Start zu beheben, und die Organisatoren gebeten, uns die letzte Zeit zu lassen. Letztendlich wurde das Problem gelöst, aber wie sich herausstellte, setzte mein Freund, anstatt den Zyklus zu kommentieren, eine "Debug" -Rückgabe, die niemand entfernen wollte.Die Rakete konnte die Sonde nicht um den angegebenen Kilometer anheben, nur 500 Meter am nächsten Tag, und so beschlossen wir, mit dem Hexacopter zu starten. Um die Position der Sonde in der Rakete zu simulieren, setzen wir eine Kappe auf den Fotodetektor und sein anderes Ende wurde an einen Hexakopter gebunden.Und so steigt der Hexakopter mit unserer schwankenden Sonde auf und verwandelt sich langsam in einen ununterscheidbaren Punkt. Die Sonde wurde von FPV pro Kilometer freigegeben, aber aufgrund der geringen Auflösung war nicht klar, ob die Offenlegung erfolgte. Jemand sagte sogar, dass sie sich nicht öffnete und mit einem Stein herunterfiel (zunächst musste sie an den angegebenen Punkten fliegen und dann zu zurückkehren Startplatz, aber auch nach 5 Minuten Wartezeit sah ihn niemand). Natürlich waren wir verärgert und suchten nach seinen Überresten auf dem Feld, aber als wir uns die neuesten Telemetriedaten anschauten, stellten wir fest, dass die letzten Koordinaten, obwohl die Verbindung mit der Sonde unterbrochen war, auf ein benachbartes Feld der Kuhpastinake hinweisen. Gehen wir die Koordinaten entlang. Auf dem Weg sagte ein anderes Team, sie habe ihn im Gebüsch sitzen sehen; Die Suche begann. Wie sich herausstellte, ist es äußerst schwierig, eine kleine Sonde im Gras zu finden, selbst wenn man ihre Koordinaten kennt.Am Ende entschied ich mich, die Motoren einzuschalten, um eine angeblich entladene Batterie zu pflanzen, und musste dann das eingebaute Voltmeter reinigen. Der Plan ging auf, wir fanden ihn sicher und gesund, auch die Propeller litten nicht unter den langgestreckten Strahlen. Die Freudigen gingen nach Hause, um die Daten oder vielmehr ihre Abwesenheit zu verarbeiten, dank der "Debug" -Rückgabe.Es stimmt, wir hatten Daten vom Fluglotsen und analysierten sie. Ich habe eine Flugbahn, ein Diagramm der Höhen und Systemfehler.
Die Freudigen gingen nach Hause, um die Daten oder vielmehr ihre Abwesenheit zu verarbeiten, dank der "Debug" -Rückgabe.Es stimmt, wir hatten Daten vom Fluglotsen und analysierten sie. Ich habe eine Flugbahn, ein Diagramm der Höhen und Systemfehler.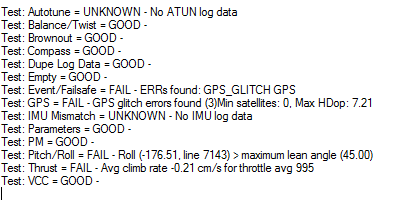
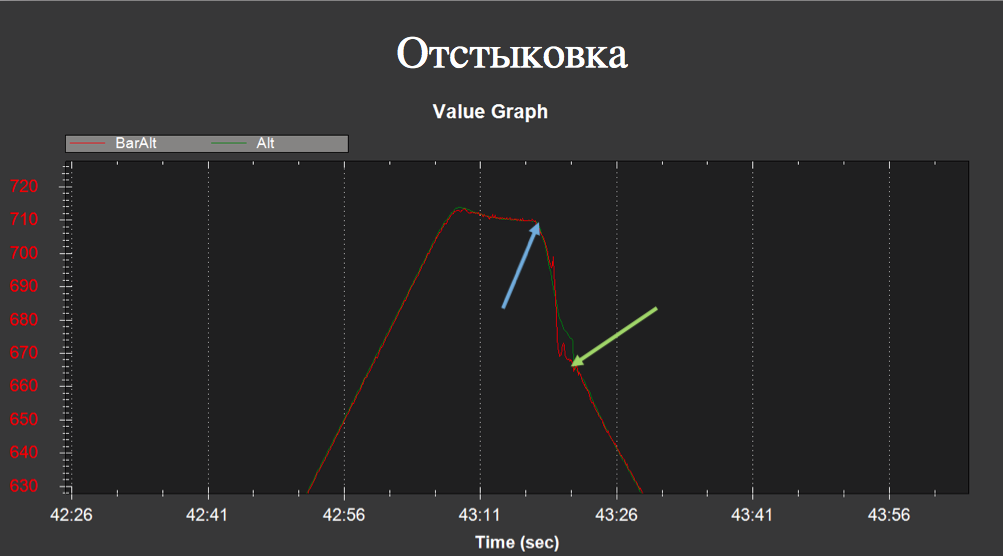 blauer Pfeil - der Moment des Einschaltens der Motoren; grüner Pfeil - der Moment der Aufnahme der Art der Rückkehr nach Hause.Wir haben auch eine Aufzeichnung vom Hexakopter erhalten.Das Ergebnis ist, dass er sich erfolgreich trennte, die Strahlen freisetzte, die Motoren einschaltete, sich aus einer umgekehrten Position ausgleichen konnte und zum nächsten Punkt flog.
blauer Pfeil - der Moment des Einschaltens der Motoren; grüner Pfeil - der Moment der Aufnahme der Art der Rückkehr nach Hause.Wir haben auch eine Aufzeichnung vom Hexakopter erhalten.Das Ergebnis ist, dass er sich erfolgreich trennte, die Strahlen freisetzte, die Motoren einschaltete, sich aus einer umgekehrten Position ausgleichen konnte und zum nächsten Punkt flog.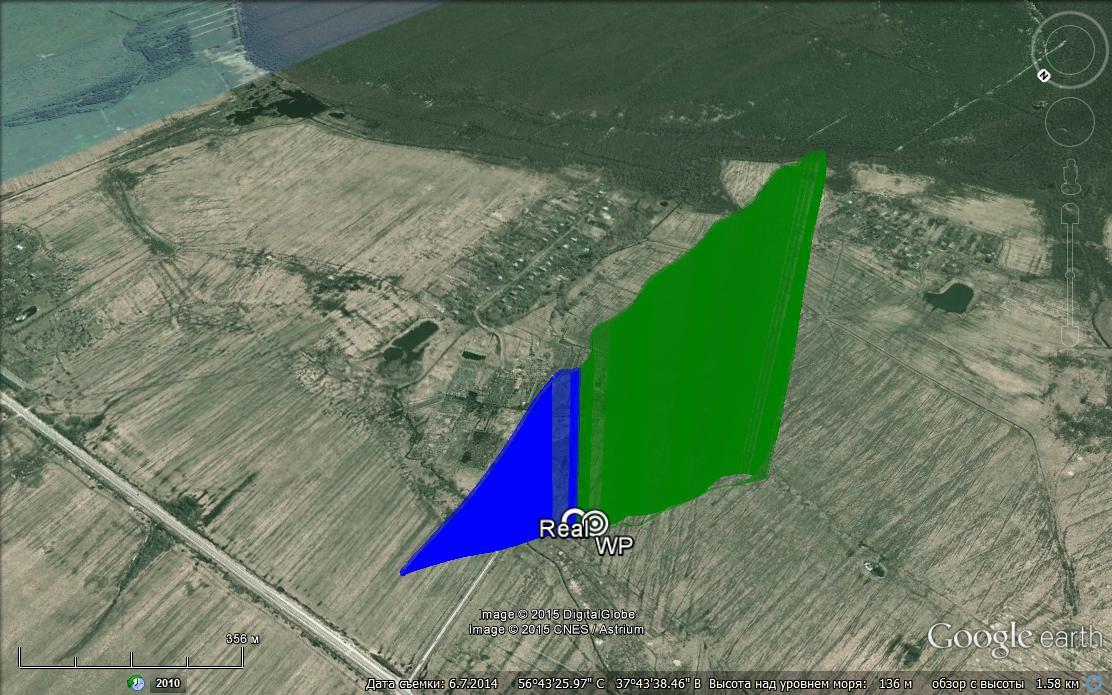 Dann gab es einen Kommunikationsverlust mit der Basisstation, genau in diesem Moment habe ich nicht berücksichtigt. In den Standardeinstellungen wurde er angewiesen, den Flug durch Punkte zu unterbrechen und nach Hause zu fliegen, also hörte er auf abzusteigen und machte sich bereit für die Basis, aber da schalteten wir die Triebwerke zu schnell ein, bevor wir Zeit hatten, das GPS „aufzuwärmen“, sodass er sich nicht ganz an diese Koordinaten erinnerte Ich habe den Punkt des Hauses nicht richtig aufgezeichnet (obwohl es eine Frage ist, warum es auf einer geraden Linie auf seinem Weg liegt). Dann landete er sanft im Automatikmodus und stellte die Motoren ab.
Dann gab es einen Kommunikationsverlust mit der Basisstation, genau in diesem Moment habe ich nicht berücksichtigt. In den Standardeinstellungen wurde er angewiesen, den Flug durch Punkte zu unterbrechen und nach Hause zu fliegen, also hörte er auf abzusteigen und machte sich bereit für die Basis, aber da schalteten wir die Triebwerke zu schnell ein, bevor wir Zeit hatten, das GPS „aufzuwärmen“, sodass er sich nicht ganz an diese Koordinaten erinnerte Ich habe den Punkt des Hauses nicht richtig aufgezeichnet (obwohl es eine Frage ist, warum es auf einer geraden Linie auf seinem Weg liegt). Dann landete er sanft im Automatikmodus und stellte die Motoren ab.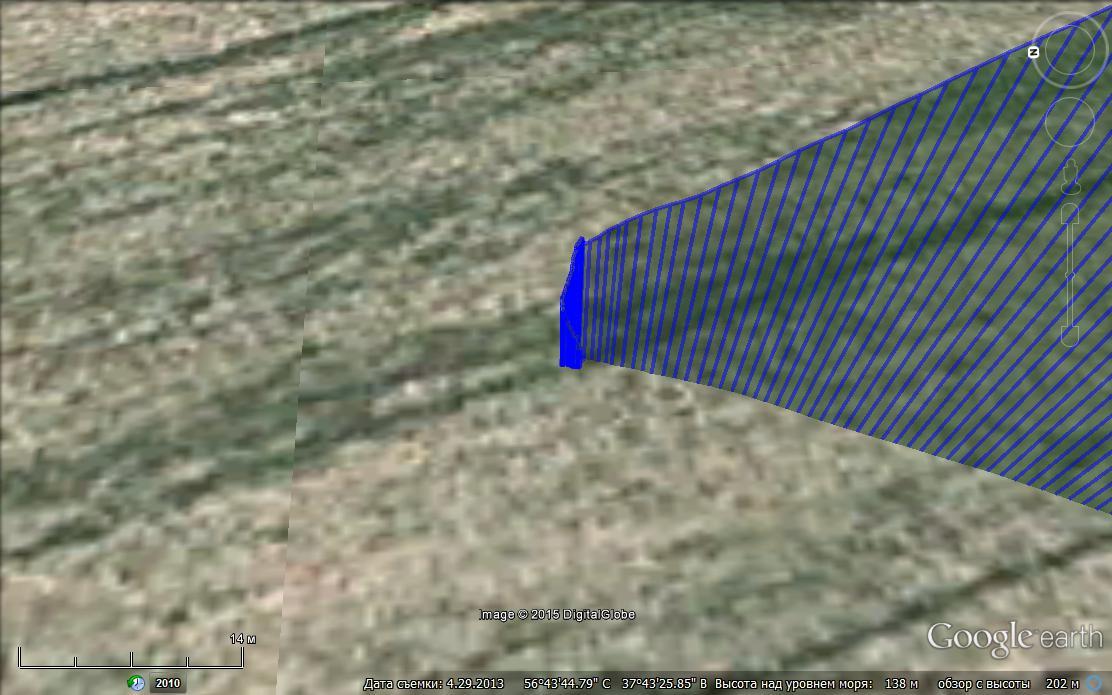 Nach so vielen Fehlern hatten wir nicht gehofft, den ersten Platz zu belegen, aber die Jury schien die Idee zu schätzen. Also haben wir die vierte CanSat-Meisterschaft in Russland gewonnen.
Nach so vielen Fehlern hatten wir nicht gehofft, den ersten Platz zu belegen, aber die Jury schien die Idee zu schätzen. Also haben wir die vierte CanSat-Meisterschaft in Russland gewonnen.PS
Ich habe nie ein einziges Arbeitsprojekt zum kontrollierten Abstieg der CanSat-Sonde gefunden, vielleicht sind wir die ersten, das ist sogar seltsam, da alles relativ einfach war.Verweise:
Hier können Sie über das letztjährige kansat lesen.Offizielle Website, wenn Sie teilnehmen möchten,Die Firmware-Website, die wir für den autonomen Flug verwendet habenNachwort?
- , , . , .
?
, , , .
?
300$ 500$, . , , , . , .
GPS ?
( ).