Neuer inländischer Motorsteuerungs-Mikrocontroller K1921VK01T von OJSC NIIET
 Irgendwie wurde die Nachricht über das Erscheinen eines neuen Mikrocontrollers K1921VK01T von OJSC NIIET weitergegeben . Wie ist es bemerkenswert? Seine Peripheriegeräte dienen zur Steuerung von Elektromotoren (Motorsteuerung). Dies sind nicht nur ein paar PWM-Kanäle. Dies sind neun hochentwickelte Zweikanal-PWM-Module (PWM), von denen drei Module (HRPWM) mit einem Modus mit „hoher“ Auflösung sind. Dies sind sechs separate 32-Bit-CAP-Erfassungsmodule. Vierundzwanzig (!) Kanäle mit 12-Bit-ADCs mit flexiblem Startmanager, integriertem Mittelwertbildner und digitalen Komparatoren. Zwei Quadraturdecoder (QEP), eine Reihe von Kommunikationsschnittstellen, interner Benutzerspeicher, Uhren - all dies auf dem ARM Cortex-M4F-Kern mit einem Megabyte integriertem Flash-Speicher und einer Leistung von 100 MIPS! Interessant?Um nicht alle technischen Merkmale des Produkts im Artikel aufzulisten, sende ich es auf die Seite der Website des Herstellers . Es gibt sowohl eine kurze Liste als auch ein vollständiges Datenblatt (obwohl es sich immer in verschiedenen Ecken der Site versteckt und zum Zeitpunkt des Schreibens kann es heruntergeladen werden ... aus der Tabelle der aktuellen Entwicklungen ). Und in dem Artikel erzähle ich Ihnen besser etwas, das nicht in Datenblättern geschrieben ist.
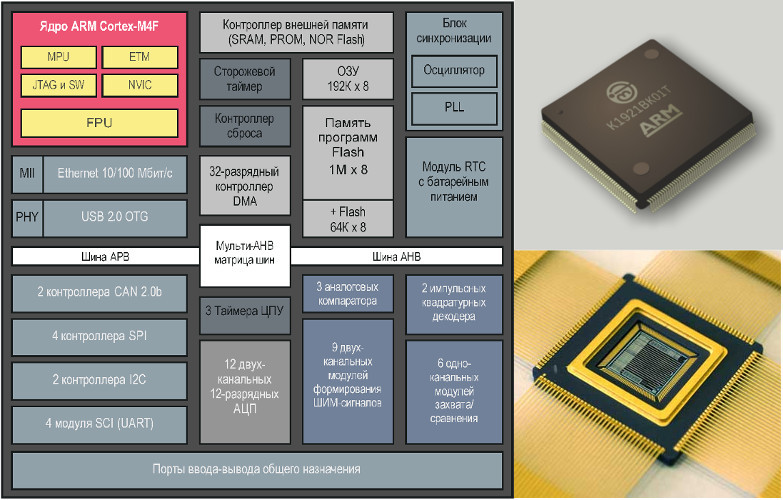
Irgendwie wurde die Nachricht über das Erscheinen eines neuen Mikrocontrollers K1921VK01T von OJSC NIIET weitergegeben . Wie ist es bemerkenswert? Seine Peripheriegeräte dienen zur Steuerung von Elektromotoren (Motorsteuerung). Dies sind nicht nur ein paar PWM-Kanäle. Dies sind neun hochentwickelte Zweikanal-PWM-Module (PWM), von denen drei Module (HRPWM) mit einem Modus mit „hoher“ Auflösung sind. Dies sind sechs separate 32-Bit-CAP-Erfassungsmodule. Vierundzwanzig (!) Kanäle mit 12-Bit-ADCs mit flexiblem Startmanager, integriertem Mittelwertbildner und digitalen Komparatoren. Zwei Quadraturdecoder (QEP), eine Reihe von Kommunikationsschnittstellen, interner Benutzerspeicher, Uhren - all dies auf dem ARM Cortex-M4F-Kern mit einem Megabyte integriertem Flash-Speicher und einer Leistung von 100 MIPS! Interessant?Um nicht alle technischen Merkmale des Produkts im Artikel aufzulisten, sende ich es auf die Seite der Website des Herstellers . Es gibt sowohl eine kurze Liste als auch ein vollständiges Datenblatt (obwohl es sich immer in verschiedenen Ecken der Site versteckt und zum Zeitpunkt des Schreibens kann es heruntergeladen werden ... aus der Tabelle der aktuellen Entwicklungen ). Und in dem Artikel erzähle ich Ihnen besser etwas, das nicht in Datenblättern geschrieben ist.Ein bisschen Geschichte
Die Arbeiten am Mikrocontroller (im Folgenden als MK bezeichnet) wurden 2012 von der Firma NPP Digital Solutions im Auftrag von OJSC NIIET begonnen(Woronesch). Es wurden Lizenzen für den ARM Cortex-M4F-Kern und einige Kommunikationsperipheriemodule erworben, und einige der Module wurden von diesem Unternehmen unabhängig entwickelt: PWM-Module, ein ADC-Controller (nicht der ADC selbst, sondern ein Manager für dessen Verwaltung), ein CAP-Erfassungsmodul und ein QEP-Quadraturdecodermodul. NPP Digital Solutions erstellte zunächst ein Mikrocontroller-Modell auf dem Kintex7-FPGA, das die gesamte Logik des zukünftigen Mikrocontrollers einschließlich des ARM-Kerns implementierte. FPGA ist jedoch ein frei umprogrammierbares Produkt, mit dem Sie Fehler in der MK-Logik korrigieren können, wenn sie nach bestandener Prüfung erkannt werden (dies gilt zusätzlich zum Testen auf einem Simulator). Aber wie testet man einen Motorcontrol-Mikrocontroller? Neben synthetischen Tests natürlich auch die eigentliche Aufgabe der Steuerung eines Elektromotors! Dafür hat sich NPP "Digital Solutions" an uns gewandtNPF Vector LLC , da wir viel Erfahrung auf dem Gebiet der elektrischen Antriebe auf Basis von MK Texas Instruments haben , obwohl wir eher in einem benachbarten Gebäude sitzen. In gemeinsamen Diskussionen bei der Entwicklung von Peripheriegeräten zur Steuerung von Elektromotoren wurde beschlossen, TMS320F28335 Texas Instruments (TI) als Modell zu verwenden, da dieser Mikrocontroller wahrscheinlich über die leistungsstärksten und flexibelsten Peripheriegeräte zur Motorsteuerung verfügt, die weltweit verdientermaßen anerkannt werden. Ausgehend von TI-Datenblättern erstellte „Digital Solutions“ auf ihrer Grundlage die interne Logik der PWM-, CAP- und QEP-Module für den K1921VK01T. Aufgrund unserer Erfahrungen mit TI MK haben wir außerdem einige Verbesserungen vorgeschlagen, die TI fehlen. Dies ist ein Filter für kurze Impulse im PWM-Modul (nicht alle Power-Key-Treiber wie das Öffnen / Schließen für einen sehr kurzen Zeitraum, IGBT kann in den linearen Modus wechseln). Dies sind einige der Nuancen im Quadratur-Decoder-Modul, mit denen Sie Probleme beim Umschalten von Zählerteilern unterwegs beseitigen können usw.Die „digitalen Lösungen“ haben sie berücksichtigt und die Peripheriefunktionalität im Vergleich zu den TI-Modulen entsprechend erweitert.Während NPP Digital Solutions die interne Logik der Module entwickelte, haben wir bei NPF Vector einen Stand zum Testen des zukünftigen Mikrocontrollers aufgestellt. Es war ein kleiner Frequenzumrichter mit sechs Transistoren („Servoverstärker“), der über Steuerkreise mit dem Prototyp-Mikrocontroller des FPGA verbunden war, und der Leistungsteil war mit einem kleinen Servomotor mit Hall-Positionssensoren (zur Überprüfung des CAP-Moduls) und einem Quadratur-Positionssensor (zur Überprüfung des QEP-Moduls) verbunden ) Unser Ziel war es, Software für den Mikrocontroller zu schreiben, um eine vollständige Vektorsteuerung des Elektromotors mit einem beliebigen Positionssensor Ihrer Wahl oder beidem gleichzeitig zu gewährleisten. Und natürlich, um alle gefundenen Probleme in der Peripherie an „Digital Solutions“ zu melden.Trotz vieler eigener Tests von MK bei Digital Solutions wurden bei Tests an einem aktiven Elektromotor viele Fehler festgestellt. Grundsätzlich waren sie mit einer ungenauen Implementierung der internen Blocklogik verbunden, die in den Datenblättern von Texas Instruments nicht explizit beschrieben wurde. Was soll das PWM-Modul beispielsweise erzeugen, wenn der Vergleichssollwert über der Timer-Periode liegt? Oder sollte das Modul eine Änderung der Drehrichtung durch ein geteiltes Signal oder durch den ursprünglichen Eingang erkennen, wenn ein Eingangssignalteiler für einen Quadraturdecoder enthalten ist? Die Antworten auf diese Fragen sind für den elektrischen Antrieb offensichtlich, für den Architekten der Mikrocontroller-Logik jedoch nicht offensichtlich. Soweit wir konnten, haben wir zusammen mit Digital Solutions ähnliche Fehler festgestellt. Das Laufwerk hat ohne Probleme erfolgreich in der Vektorsteuerung gearbeitet.Natürlich konnten wir mit solchen Tests nicht alle Fehler abdecken - bei anderen Aufgaben treten die Fehler sicher wieder auf. Dafür gibt es jedoch Errata und neue Revisionen von Mikrocontrollern: Um Fehler zu beheben, müssen Sie diese zuerst sammeln. Nach dem Debuggen der MK-Logik auf dem FPGA mit "Digital Solutions" wurde die "Verkabelung" des MK (oder was auch immer) durchgeführtheißt es Mikrocontroller? Topologie?), Danach wurden alle Ergebnisse der Arbeit an NIIET übertragen. Übrigens haben wir bereits nach der Veröffentlichung von MK im "Stein" einige Fehler gefunden, aber NIIET hielt sie für kritisch genug, um das MK-Layout zu ändern: Sie sammeln sich mehr an - sie werden es beheben.Titel
Ich muss auch sagen, dass der Mikrocontroller mehrere Namen überlebt hat. Während der Entwicklung hatte es zunächst den Codenamen „MS01“, dann hieß die experimentelle Steincharge NT32M4F1 und wurde dann zu K1921VK01T (außerdem sind die Buchstaben an einigen Stellen in russischer Sprache und in anderen englischen Buchstaben geschrieben). Seien Sie daher nicht überrascht, wenn Sie diese Namen in frühen Artikeln und Veröffentlichungen zu diesem MK sehen.Wie teuer?
Derzeit (Anfang 2016) ist das NIIET bereit, die erste Charge von Mikrocontrollern zu verkaufen, die bereits bei den Kunden angekommen ist. Die Kristalle sind teilweise in Kunststoff, teilweise in Keramik eingeschlossen (so dass es bei kritischen Anwendungen nicht funktioniert, wie Sie selbst wissen , was Sie tun)) Der Preis für Stein in Kunststoff lag Ende 2015 anscheinend etwas unter 3 tr, was höher ist als der Preis für TI TMS320F28335 beim Kauf in Russland (zum Zeitpunkt des Schreibens betrug der Koeffizient für die Umrechnung „ihrer“ Preise in „unsere“ 76). In TMS320F28335 gibt es jedoch keinen Benutzerspeicher und keine Stunden. Sie müssen externe festlegen, wodurch die Kosten am Ende vergleichbar werden. Dies macht K1921VK01T nicht nur hinsichtlich der Importsubstitution vielversprechend, sondern auch hinsichtlich einfacher „Handelsinteressen“. Obwohl dieser Vergleich natürlich nicht ganz richtig ist, finden Sie auf dem Cortex-M4F eine Reihe von Beispielen für billigere Kristalle mit einer höheren Taktfrequenz, aber mit weniger Peripheriegeräten. Daher ist der K1921VK01T für einfache Aufgaben übermäßig groß und teuer. Aber für die Hauptanwendung (Steuerung von Elektromotoren und komplexer Leistungselektronik) ist es wettbewerbsfähig.Was haben wir mit Leistung?
Wir haben vor einem Jahr eine Präsentation auf der Ausstellung darüber gehalten. Die Präsentation finden Sie hier. Unsere Tests geben natürlich nicht vor, besonders genau zu sein - schließlich haben wir keine echten Benchmarks durchgeführt, sondern dasselbe Vektorsteuerungssystem in den Test „aufgerollt“ (und was kann elektrische Antriebe sonst noch anregen?). Eine kurze Nacherzählung der Präsentation lautet jedoch wie folgt: Die ARM Cortex-M4F-Architektur bleibt in den für Laufwerksaufgaben erforderlichen Durchschnittsberechnungen hinter dem C28 TI-Kern-DSP zurück. Wenn Sie die Genauigkeit der Berechnungen nach Möglichkeit mithilfe von approximierten trigonometrischen Funktionen usw. verringern, können Sie diese Lücke auf etwa 15% reduzieren. Gleichzeitig beträgt die Taktfrequenz der oberen C28-Kerne (der gleiche TMS320F28335) 150 MHz und die Frequenz von K1921VK01T 100 MHz. Daher entspricht der K1921VK01T bei allen Bibliotheksoptimierungen in seiner Rechenleistung irgendwo der TI Piccolo MK-Serie mit einer Frequenz von 90 MHz. Was kann als ... sehr gut interpretiert werden, unserer Meinung nach,Denn wenn Sie alle Hardware-Schnickschnack des neuen MK wie DMA und selbstfilternde ADC-Messungen richtig verwenden, können Sie viel Zeit sparen. Auf die eine oder andere Weise haben wir es geschafft, in K1921VK01T unser anspruchsvollstes Projekt für Leistung zu „stopfen“, basierend auf dem TMS320F2810 (150 MHz, C28-Kern), der bereits in denselben 2810 stürzt.?
Und was könnte mit ihnen falsch sein, es ist ARM! Normal, ohne "aber". Nehmen Sie eine JTAG, eine Entwicklungsumgebung, aber ... nein, schließlich wird keine funktionieren. "Aber" ist die Flash-Speicher-Firmware. Trotz der Tatsache, dass der ARM-Kern selbst standardisiert ist und jeder JTAG und jede Umgebung eine Verbindung zu K1921VK01T herstellen, ist dies mit der Flash-Firmware nicht so einfach. Es scheint, dass jeder Hersteller von Mikrocontrollern es für seine Pflicht hält, eigene Register für die Arbeit mit der Firmware seines Flash-Speichers zu erstellen. Daher werden die Entwickler von Entwicklungstools mit der Unterstützung dieses ganzen Zoos gequält. Auch in dieser Hinsicht liegt K1921VK01T nicht weit zurück - es gibt dort auch Methoden, mit Blitzlicht zu arbeiten. Aber wenn für namhafte Hersteller Flash-Speicherprogrammierer (Treiber, Blinker oder wie soll ich das nennen?) In Entwicklungsumgebungen geschrieben werden und sofort funktionieren, dann funktioniert für K1921VK01T alles nur für diese Umgebungenfür die Programmierer bei NIIET geschrieben haben. Glücklicherweise ist für IAR und Keil alles fertig und Beispiele für Projekte mit Firmware-Anweisungen finden Sie unterNIIET-Forum sowie im offenen Repository auf Bitbucket , das von NIIET verwaltet wird. Darüber hinaus haben wir bei NPF Vector Unterstützung für die Programmierung von Flash K1921VK01T für OpenOCD geschrieben(Öffnen Sie den On-Chip-Debugger). Dies ist eine solche Schicht zwischen dem GDB-Debugger und dem Eisen in Form verschiedener JTAG-Emulatoren und verschiedener Steine. Aber während wir die "Codeüberprüfung" im OpenOCD-Repository mit Konfliktlösung abriefen, haben die NIIET-Entwickler dasselbe geschrieben, aber ihre war besser (sie haben zusätzlich zum Brennen des Haupt-Flash-Speichers auch die Benutzerbrennfunktion hinzugefügt), aber ... das sind alle Texte. Was gibt diese OpenOCD? Dies ist eine Art Eisenabstraktionsschicht, mit der Sie Ihre eigene kostenlose und kostenlose Entwicklungsumgebung für K1921VK01T basierend auf einer gängigen IDE erstellen können. Wir im „Vector“ lieben Eclipse (da die TI Code Composer Studio-Umgebung, beginnend mit v4, darauf basiert, sind wir daran gewöhnt und im Allgemeinen gibt es keine bessere IDE auf der Welt als Eclipse) Und die Entwickler von NIIET haben eine Entwicklungsumgebung für Qt Creator erstellt. Aber im Allgemeinen ist die Bedeutung hier und da dieselbe: Sie nehmen die Umgebung, nehmen die kostenlosen Cross-Development-Tools für GCC, nehmen das Plug-In für die Arbeit mit OpenOCD, OpenOCD selbst, ein paar Konfigurationen, ein bisschen Magie ... und arbeiten bereits vollständig mit K1921VK01T, vergessen IAR und Keil. Zum Zeitpunkt des Schreibens haben wir unsere Eclipse-Assembly (wir haben sie VectorIDE genannt) für K1921VK01T auf unserer Website veröffentlicht. Das Rezept für Qt Creator finden Sie im NIIET-Forum . Persönlich führen wir alle Projekte für K1921VK01T in einer kostenlosen Umgebung durch und wir beraten Sie - die GCC-Compiler bleiben nicht wirklich hinter den Marken-IARs zurück (siehe unsere gleiche Präsentation)), aber wenn Sie ein seriöses Unternehmen sind, müssen Sie keine teure importierte Software kaufen (bereits mit einem Umrechnungsfaktor von 76, Karl! 78!).Oh ja. Es gibt noch eine Sache. Es heißt Codemaster ++ [ARM] . Dies ist eine 100% ige inländische Entwicklungsumgebung, einschließlich Compiler, und auch für K1921VK01T konzipiert. Wir haben die ersten Versionen vor einem Jahr untersucht, aber festgestellt, dass sie noch nicht fertig sind, ein wenig in Bezug auf Compiler und viel in Bezug auf die einfache Bearbeitung von Code (obwohl sie in dieser Hinsicht mit der IAR konkurrieren kann, wer weiß, was ich meine). Aber es ist klein und schnell und auf der Oberfläche ähnelt es einer Art "Hacker" -Debugger wie OllyDbg (vergleiche: eins und zwei ). Im Allgemeinen wird vielleicht jemand interessiert sein. Ich muss sagen, dass die Entwickler (Firma"Fiton" ) hat sich sehr bemüht und sogar einmal unseren Benchmark a la "Vector Engine Control" angefordert, um seine Compiler zu optimieren.Was haben wir mit Debugging-Kits?
 Zu Beginn des Jahres 2016 sind vier Debug-Boards auf K1921VK01T bekannt. Dies ist unsere VectorCARD K1921BK01T und andere ... von Mitbewerbern. Ok, so sei es, hier sind die Links LDM-HELPER-K1921BK01T und MBS-K1921VK01T . Es scheint auch, dass das NIIET selbst ein eigenes Board NIIET_1921BK01T hat, aber auf seiner Website versteckt es sich anscheinend vor mir - wenn jemand einen Link findet, werde ich den Artikel gerne ergänzen. Was ist der Unterschied zwischen ihnen? Wir verkaufen kein nacktes Board, sondern ein Kit mit Wechselrichter, Elektromotor, Vektorsteuerung in C-Quellcodes (basierend auf dem, was wir damals für Digital Solutions geschrieben haben) sowie ein Top-Level-Programm und einen CANopen-Treiber zur Überwachung aller Prozesse im Laufwerk - siehe unseren ersten Artikel. Wenn Sie also nur mit dem neuen MK spielen, eine LED blinken oder Daten über verschiedene Kommunikationsschnittstellen senden möchten, ist es am besten, Debug-Boards von Mitbewerbern zu kaufen (obwohl wir auch eine Bare-Board-Option für 15 tr haben, aber es ist völlig "blank" - einige Schlussfolgerungen). Wenn Sie jedoch einen elektrischen Antrieb auf dem neuen MK erstellen möchten, können Sie mit unserem Debugging-Kit und unserer Debugging-Software ein halbes oder ein Jahr Entwicklungszeit sparen (oder mehr, je nachdem, ob Sie die Theorie des elektrischen Antriebs kennen und über eigene Debugging- und Oszillographie-Tools verfügen ähnlich wie bei uns). Wenn Sie den ersten Artikel sorgfältig gelesen habenDenken Sie dann wahrscheinlich daran, dass das Debuggen eines Steuerungssystems für einen elektrischen Antrieb ohne Visualisierung der darin enthaltenen Prozesse unmöglich ist. Und wenn die Entwicklungsumgebung bei Texas Instruments in der Lage ist, "out of the box" -Oszillogramme basierend auf den Daten des Speicherarrays von MK anzuzeigen, wurde für ARM in universellen Entwicklungsumgebungen (nicht von einem bestimmten Hersteller von MK) eine solche Funktion noch nicht beobachtet (wenn die Fiton-Entwickler sie gelesen haben) - Möchten Sie Ihren Codemaster ++ [ARM] mit dem Oszilloskop-Builder ändern? Das ist ganz einfach!). In unserem Debugging-Kit sind solche Mittel zur Visualisierung von Wellenformen vorhanden, sodass Sie sofort alles sehen können, was Elektromotoren steuern soll: die Form von Phasenströmen, Spannungen, Ein- / Ausgängen aller Regler usw. Der Preis für unser Kit ist groß, ca. 130 tr.(Nur ein Elektromotor mit allen Positionssensoren kostet derzeit ca. 30 tr). Für ein Unternehmen, das ein neues Produkt erlernen möchte, sollte dies jedoch nicht kritisch sein - eine kommerzielle Entwicklungsumgebung für ARM allein kann mehr kosten.
Zu Beginn des Jahres 2016 sind vier Debug-Boards auf K1921VK01T bekannt. Dies ist unsere VectorCARD K1921BK01T und andere ... von Mitbewerbern. Ok, so sei es, hier sind die Links LDM-HELPER-K1921BK01T und MBS-K1921VK01T . Es scheint auch, dass das NIIET selbst ein eigenes Board NIIET_1921BK01T hat, aber auf seiner Website versteckt es sich anscheinend vor mir - wenn jemand einen Link findet, werde ich den Artikel gerne ergänzen. Was ist der Unterschied zwischen ihnen? Wir verkaufen kein nacktes Board, sondern ein Kit mit Wechselrichter, Elektromotor, Vektorsteuerung in C-Quellcodes (basierend auf dem, was wir damals für Digital Solutions geschrieben haben) sowie ein Top-Level-Programm und einen CANopen-Treiber zur Überwachung aller Prozesse im Laufwerk - siehe unseren ersten Artikel. Wenn Sie also nur mit dem neuen MK spielen, eine LED blinken oder Daten über verschiedene Kommunikationsschnittstellen senden möchten, ist es am besten, Debug-Boards von Mitbewerbern zu kaufen (obwohl wir auch eine Bare-Board-Option für 15 tr haben, aber es ist völlig "blank" - einige Schlussfolgerungen). Wenn Sie jedoch einen elektrischen Antrieb auf dem neuen MK erstellen möchten, können Sie mit unserem Debugging-Kit und unserer Debugging-Software ein halbes oder ein Jahr Entwicklungszeit sparen (oder mehr, je nachdem, ob Sie die Theorie des elektrischen Antriebs kennen und über eigene Debugging- und Oszillographie-Tools verfügen ähnlich wie bei uns). Wenn Sie den ersten Artikel sorgfältig gelesen habenDenken Sie dann wahrscheinlich daran, dass das Debuggen eines Steuerungssystems für einen elektrischen Antrieb ohne Visualisierung der darin enthaltenen Prozesse unmöglich ist. Und wenn die Entwicklungsumgebung bei Texas Instruments in der Lage ist, "out of the box" -Oszillogramme basierend auf den Daten des Speicherarrays von MK anzuzeigen, wurde für ARM in universellen Entwicklungsumgebungen (nicht von einem bestimmten Hersteller von MK) eine solche Funktion noch nicht beobachtet (wenn die Fiton-Entwickler sie gelesen haben) - Möchten Sie Ihren Codemaster ++ [ARM] mit dem Oszilloskop-Builder ändern? Das ist ganz einfach!). In unserem Debugging-Kit sind solche Mittel zur Visualisierung von Wellenformen vorhanden, sodass Sie sofort alles sehen können, was Elektromotoren steuern soll: die Form von Phasenströmen, Spannungen, Ein- / Ausgängen aller Regler usw. Der Preis für unser Kit ist groß, ca. 130 tr.(Nur ein Elektromotor mit allen Positionssensoren kostet derzeit ca. 30 tr). Für ein Unternehmen, das ein neues Produkt erlernen möchte, sollte dies jedoch nicht kritisch sein - eine kommerzielle Entwicklungsumgebung für ARM allein kann mehr kosten.Nachteile von K1921VK01T
Was sind die Hauptnachteile des neuen K1921VK01T, die jetzt festgestellt werden können?• Erstens ist dies zweifellos ein Rohprodukt, da es bisher wirklich von 10 bis 20 Personen programmiert wurde. Wenn mehr Entwickler darauf sitzen, werden Fehler erkannt - neue Revisionen werden veröffentlicht. Also mach dich bereit. Trotzdem können sie die Motoren verdrehen - persönlich verdreht.• Im Moment ist die Dokumentation auch feucht. Es gibt nur wenige Fehler, aber einige Dinge werden erklärt ... es ist nicht ganz klar. Man könnte etwas detaillierter malen, Beispiele nennen. Ich denke, im Laufe der Zeit wird es abgeschlossen sein.• Der Mikrocontroller ist sehr groß und hoch entwickelt. Dies ist für jemanden ein Plus, für jemanden ein Minus. Nur sehr wenige Anwendungen decken den gesamten Funktionsumfang ab. NIIET denkt bereits an eine Reihe von MK, die darauf basieren, mit verschiedenen Gebäuden und einer Reihe von Peripheriegeräten. Aber im Moment gibt es nur K1921VK01T.• Er hat einen bestimmten ADC. Häufig installieren MK-Hersteller ein schnelles ADC-Modul (12 MS / s) und multiplexen es über mehrere Kanäle. Dies wurde beispielsweise von Texas Instruments in der C2000-Serie durchgeführt. In K1921VK01T arbeiten jedoch 12 langsame Zweikanal-ADC-Module (1,7 MS / s) parallel. Warum ist es schlecht, außer der Unfähigkeit, etwas sehr schnell zu messen? Wenn sich im MK ein ADC befindet, können Sie auf der Steuerplatine kalibrierte Referenzsignale, z. B. 1 V und 2 V, an zwei nicht verwendete Kanäle senden und diese zur Berechnung und Kompensation des Multiplikationsfehlers und des Offsetfehlers dieses einen ADC verwenden, wodurch die Korrektur auf alle Kanäle ausgedehnt wird (der ADC ist einer ) Wenn es in MK viele ADCs gibt, funktioniert ein solcher Trick nicht - sie haben alle ihre eigenen persönlichen Fehler. Wir haben den Kalibrierungstrick beim Texas Instruments MK Typ TMS320F2810 verwendet (dies wird im Datenblatt beschrieben und empfohlen).Hier in K1921VK01T ohne Kalibrierung haben wir eine geringere Genauigkeit des ADC im Vergleich zum kalibrierten TMS320F2810. Wir mussten einen speziellen Stand für die unabhängige Kalibrierung jedes K1921VK01T ADC-Moduls erstellen und die Kalibrierungstabelle in den integrierten Benutzerspeicher sticken. Dann stellte sich heraus, dass die Genauigkeit der analogen Messungen vergleichbar war (die Kalibrierung schwebt fast nicht von der Temperatur weg - sie wurde überprüft). Wahrscheinlich sollte NIIET eine solche Tabelle im Werk flashen, es wäre praktisch. Aber solange der Blitz leer ist.Dann stellte sich heraus, dass die Genauigkeit der analogen Messungen vergleichbar war (die Kalibrierung schwebt fast nicht von der Temperatur weg - sie wurde überprüft). Wahrscheinlich sollte NIIET eine solche Tabelle im Werk flashen, es wäre praktisch. Aber solange der Blitz leer ist.Dann stellte sich heraus, dass die Genauigkeit der analogen Messungen vergleichbar war (die Kalibrierung schwebt fast nicht von der Temperatur weg - sie wurde überprüft). Wahrscheinlich sollte NIIET eine solche Tabelle im Werk flashen, es wäre praktisch. Aber solange der Blitz leer ist.• Die Frequenz von 100 MHz ist natürlich eher niedrig, ich möchte es schneller. Aber das heißt, das ist. Obwohl an einigen Stellen die Frequenz von 125 MHz geschrieben wird, hängt alles von der Umgebungstemperatur ab. "Digital Solutions" berichtete über solche inoffiziellen Informationen: Das Innere des Kristalls ist für maximal 125 Grad ausgelegt. Die Temperatur ist etwa 15 Grad höher als die Umgebung. Gemäß dem Projekt sollte K1921VK01T bei 85 Grad der Umgebung + Reserve arbeiten, was garantiert bei 100 MHz erreicht wird. Tatsächlich kann MK über 100 MHz beschleunigt werden, wobei einzelne Abtastwerte bei 140-170 MHz arbeiten, dies hängt jedoch von der Abtastung ab. Wenn der Kristall nicht überhitzt ist, kann er dispergiert werden, wenn jemand ihn benötigt. Wenn es in Ihrer Anwendung jedoch heiß ist (+85), ist es besser, nicht über 100 MHz zu schikanieren.• Es gibt keinen offiziellen Bootloader (Programmierer) über Kommunikationsschnittstellen (CAN, RS). Das Nähen von MK ist nur über JTAG / SWD möglich. Wenn sich der Produktcontroller in einem geschlossenen Fall befindet, müssen Sie Ihren Bootloader für die gewünschte Kommunikationsschnittstelle schreiben. Oder warten Sie, bis NIIET schreibt. Bisher nein, aber ich denke, es wird erscheinen.Fazit
Obwohl, was ist die Schlussfolgerung noch? Alles fängt gerade erst an! Schließlich gibt es einen Haushalts-Mikrocontroller, mit dem Sie wirklich einen elektrischen Antrieb machen können! Zuvor waren alle vorhandenen inländischen MKs entweder durch den Kern oder durch die Peripherie schwach, um die Aufgaben der Motorsteuerung zu bewältigen. Aber jetzt - völlige Freiheit für die komplexesten Steuerungsstrukturen und das komplexeste Aggregat. Ich möchte besonders die Aussichten dieses Mikrocontrollers für Maschinenservoantriebe erwähnen. Bisher war es in Russland nicht möglich, eine vollständig inländische mehrachsige Präzisionsmaschine herzustellen, da (einer der Gründe) nichts für einen hochwertigen Servoantrieb vorhanden war. Jetzt gibt es so einen Mikrocontroller.Source: https://habr.com/ru/post/de389129/
All Articles