Vektorsteuerung für asynchronen Fingermotor
 Im vorherigen Artikel "Vektorsteuerung des Elektromotors" an den Fingern " wurde ein Vektorsteuerungssystem für Synchronmotoren in Betracht gezogen. Der Artikel erwies sich als groß, daher wurde die Frage nach Induktionsmotoren in einer separaten Veröffentlichung gestellt. Dieser Artikel ist eine Fortsetzung des vorherigen Artikels und basiert auf den dort gegebenen Erläuterungen zu den Funktionsprinzipien von Elektromotoren. Sie wird über die Merkmale des Asynchronmotors in Bezug auf die Vektorsteuerung sprechen und auch die Unterschiede in der Struktur des Vektorsteuerungssystems zwischen synchronen und asynchronen Maschinen zeigen.Wie funktioniert ein Induktionsmotor? Die populärste Erklärung besagt so etwas wie "Der Stator erzeugt ein rotierendes Magnetfeld, das eine EMF im Rotor induziert, wodurch Ströme dorthin fließen, wodurch der Rotor vom Statorfeld weggetragen wird und sich zu drehen beginnt." Persönlich verstehe ich aufgrund einer solchen Erklärung nicht die gesamte Physik des Prozesses, also lassen Sie es uns anders erklären, "an den Fingern".Haben Sie noch ein Video gesehen, wie ein Magnet mit einem Kupferzylinder interagiert? Achten Sie besonders auf den Zeitbereich von 0:49 bis 1:03 - dies ist ein echter Asynchronmotor:Der Effekt ist auf das Auftreten von Wirbelströmen im Zylinder zurückzuführen. Nach dem von Michael Faraday entdeckten Gesetz der elektromagnetischen Induktion tritt bei Änderung des Magnetflusses eines geschlossenen Stromkreises eine EMF auf (nehmen Sie einfach an, dass die Spannung). Diese EMK, wie sie an einen Kupferzylinder angelegt wird, bewirkt sofort, dass ein Strom im Zylinder auftritt. Gleichzeitig erzeugt dieser Strom auch einen eigenen Magnetfluss, der genau in die entgegengesetzte Richtung zu der Änderung des Magnetflusses gerichtet ist, die wir bringen: DerInduktionsstrom, der in einem geschlossenen leitenden Stromkreis entsteht, hat eine solche Richtung, dass das von ihm erzeugte Magnetfeld dieser Änderung des Magnetflusses entgegenwirkt. was diesen Strom verursachte.Dies kann so verstanden werden, dass die geschlossene Schleife der Änderung des Magnetflusses in sich selbst widersteht. Wenn Sie den Magneten scharf zum Kupferzylinder bringen, d.h. Nehmen Sie eine starke Änderung des Magnetflusses vor, dann fließen die Antwortströme im Zylinder, so dass das Magnetfeld im Zylinder zum ersten Zeitpunkt Null ist: Das Magnetfeld des hochgezogenen Magneten wird vollständig durch das Magnetfeld der Zylinderströme kompensiert (natürlich mit Annahmen). Wenn Sie den Magneten halten und halten, nehmen die Ströme im Zylinder aufgrund des vorhandenen Kupferwiderstands allmählich ab, und das durch seine Ströme erzeugte Feld des Zylinders verschwindet: Der Magnetfluss des Permanentmagneten „platzt“ in den Zylinder, als gäbe es keinen Zylinder. Es lohnt sich jedoch, den Magneten zu entfernen.wie der Zylinder wieder reagiert - jetzt wird er versuchen, den verlorenen Magnetfluss in sich selbst "wiederherzustellen", d.h. wird wieder einer Änderung des Magnetflusses widerstehen, in diesem Fall sein Verschwinden. Aber was bedeutet es, den Magnetfluss wiederherzustellen? Dies bedeutet, dass ein Kupferzylinder für einige Zeit bedingt als „Permanentmagnet“ betrachtet werden kann - ein Wirbelstrom zirkuliert darin und erzeugt ein Magnetfeld (Supraleiter in einem Magnetfeld „hängen“ nach demselben Prinzip, aber dies ist eine ganz andere Geschichte).aber das ist eine ganz andere Geschichte).aber das ist eine ganz andere Geschichte).Wenden wir uns nun dem Design eines Induktionsmotors zu. Der Rotor eines Induktionsmotors kann bedingt auch in Form eines Kupferzylinders vorgestellt werden. In realen Konstruktionen ist dies jedoch ein bestimmtes Gitter in Form eines „Eichhörnchenkäfigs“ (Abbildung 1) aus Kupfer oder Aluminium in Kombination mit einem Magnetkreis (beladenes Eisen).Abbildung 1. Der Rotor eines Induktionsmotors vom Typ Käfigläufer mit Strom in einem der Käfigrahmen, der auf eine Zunahme eines externen Magnetfelds reagiert.Die Figur zeigt schematisch den Stromfluss in einem der "Rahmen", d.h. Wenn Sie in einigen Balken eines Eichhörnchenkäfigs einen Magneten von oben mitbringen (erzeugen Sie einen Strom im Stator). Tatsächlich fließt der Strom in diesem Fall in allen Stäben, mit Ausnahme der oberen und unteren Stäbe, für die sich der Fluss nicht ändert (sie würden jedoch auf einen horizontal dargestellten Magneten reagieren).Denken Sie daran, vom Anfang des letzten Artikelsein Bild mit einer schematischen Darstellung einer Zweiphasensynchronmaschine, wo war der Magnet der Rotor? Lassen Sie uns nun einen Induktionsmotor daraus machen: Anstelle eines Magneten werden zwei senkrechte kurzgeschlossene Spulen eingesetzt, die den Kupferzylinder des Rotors symbolisieren (Abbildung 2).Figure 2. Schematische Darstellung eines Zweiphasen-Käfigläufermotors.Das Ersetzen eines Zylinders durch zwei Spulen zur Erläuterung des Funktionsprinzips (oder der Modellierung) ist korrekt, ebenso wie das Ersetzen einer dreiphasigen Wicklung durch eine zweiphasige Wicklung. Nur in diesem Fall ersetzen wir ... die "Endlosphasenwicklung" des Zylinders (eine unendliche Anzahl von Rahmen) durch zwei Spulen mit äquivalenter Induktivität und Widerstand. Schließlich können Sie mit zwei Spulen genau den gleichen Strom- und Magnetflussvektor wie einen Zylinder erzeugen.Und jetzt machen wir eine kurze Zeit aus einer asynchronen Maschine synchron. Wir führen die Achse β in die Spule einGleichstrom und warten Sie zwei oder drei Sekunden, bis die Ansprechströme im Rotor nicht mehr fließen: „Wir bringen einen externen Magneten hoch“. Das heißt, wir warten darauf, dass die Ströme im Rotor abfallen, damit das Magnetfeld des Stators den Rotor „durchbohrt“ und niemand ihn stört. Was passiert jetzt, wenn Sie den Strom im Stator abschalten? Richtig, für die gleichen zwei oder drei Sekunden, während der Strom des Rotors dem entgegengesetzt ist, erhalten wir einen „normalen Magneten“ vom Rotor (Abbildung 3).Abbildung 3. Asynchronmotor: Wenn der Gleichstrom in Phase β gerade abgeschaltet wurde, fließt Strom im Rotor i rd .Worauf warten wir noch? Schneller, bis der Magnet verschwunden ist, zeichnen wir die bekannte d- Achse (wie bei einer Synchronmaschine) und die dazu senkrecht stehende q- Achse senkrecht zum Rotor. Wir schalten die Struktur der Vektorsteuerung der Synchronmaschine ein, legen Strom entlang der q- Achse an und erzeugen einen Moment. Los geht's!Sie können also sogar ein paar Umdrehungen machen, bis unser Zuckermagnet geschmolzen ist und die d- Achsenicht in Vergessenheit geraten. Was tun? Lassen Sie uns den Strom entlang der d-Achse nicht abschalten und unseren Magneten tanken! Und wieder speichern wir die Vektorsteuerungsstruktur der Synchronmaschine, indem wir einfach die Aufgabe entlang der d- Achse senden (zuvor gab es Null). Wir sehen uns also Abbildung 4 an: Die d- , q- Achsen werden vom Positionssensor am Rotor „befestigt“, der Motor steht, der Strom entlang der d- Achse im Stator wird angelegt , der in diesem Fall mit der β- Achse für eine stehende Maschine übereinstimmt . Entlang der q- Achse fließt kein Strom : Wir warten, bis der Rotor „magnetisiert“. Und jetzt speisen wir den aktuellen i sq (s - Stator)! Lass uns gehen!Abbildung 4. Wir legen Strom an die d- Achse an , magnetisieren die Maschine und bereiten alles für die Stromversorgung der Statorachse q vor .Wie weit werden wir mit dieser Methode von Baron Münchhausen gehen? Leider gibt es keine. Sehen Sie, was passiert ist (Abbildung 5):Abbildung 5. Ein Magnet ist ausgerutscht!Der Motor begann sich zu drehen, aber einige Zeit nachdem wir Strom an die q- Achse angelegt hatten , den Gesamtstrom i s gebildet und diesen Vektor an die Position des Rotors „genagelt“ hatten, „bewegte“ sich der Magnet im Rotor heraus! Und stand genau entlang des Vektors i s . Der Rotor versteht nicht, wo wir die Achsen d , q gezeichnet haben ... Es ist ihm egal, ob er sich drehte oder nicht. Es ist wichtig, dass sein interner „induzierter Magnet“ letztendlich gemeinsam mit dem Statormagnetfluss gerichtet werden soll, um dem externen Fluss zu „gehorchen“. Aufgrund des herausgezogenen Magneten hört der Motor auf zu drehen: Nicht nur, dass zwischen dem Rotormagneten und dem Strom i q keine gewünschten 90 Grad vorhanden sind, sondern auch ein Achsenstromd zieht es nun in die entgegengesetzte Richtung und kompensiert das durch den Strom i q erzeugte Moment . Die Methode von Baron Münchhausen schlug fehl.Was tun mit einem schwer fassbaren Rotormagneten? Und lassen Sie uns die Vektorsteuerungsstruktur des Induktionsmotors nicht in den am Rotor angebrachten d , q- Achsen , sondern in anderen Achsen, die genau an der aktuellen Position des „Rotormagneten“ angebracht sind, festlegen - nennen wir sie die x , y- Achsen , um sie von d , q zu unterscheiden. Nach dem "wissenschaftlichen" sind dies Achsen, die entlang der Rotorflussverbindung ausgerichtet sind. Aber woher wissen Sie, wo genau jetzt die Rotorflussverbindung ist, d.h. Wo ist der Magnet im Rotor gedreht? Seine Position hängt ... erstens von der Position des Rotors selbst ab (wir haben einen Positionssensor), zweitens von den Statorströmen (die einen Statorstrom erzeugen, den der Rotormagnet schließlich drehen wird) und drittens von den Parametern der Rotorkette - der Induktivität und dem Widerstand des "Kupferzylinders" (es ist ein Käfig, es ist die Rotorwicklung, es ist die Rotorkette). Wenn man dies alles weiß, kann die Position des „Magneten“ des Rotors einfach unter Verwendung mehrerer Differentialgleichungen berechnet werden. Dies geschieht durch den sogenannten Rotorfluss-Verbindungsbeobachter, der im endgültigen Strukturdiagramm der Vektorsteuerung eines Asynchronmotors farblich hervorgehoben ist (Abbildung 6).
Im vorherigen Artikel "Vektorsteuerung des Elektromotors" an den Fingern " wurde ein Vektorsteuerungssystem für Synchronmotoren in Betracht gezogen. Der Artikel erwies sich als groß, daher wurde die Frage nach Induktionsmotoren in einer separaten Veröffentlichung gestellt. Dieser Artikel ist eine Fortsetzung des vorherigen Artikels und basiert auf den dort gegebenen Erläuterungen zu den Funktionsprinzipien von Elektromotoren. Sie wird über die Merkmale des Asynchronmotors in Bezug auf die Vektorsteuerung sprechen und auch die Unterschiede in der Struktur des Vektorsteuerungssystems zwischen synchronen und asynchronen Maschinen zeigen.Wie funktioniert ein Induktionsmotor? Die populärste Erklärung besagt so etwas wie "Der Stator erzeugt ein rotierendes Magnetfeld, das eine EMF im Rotor induziert, wodurch Ströme dorthin fließen, wodurch der Rotor vom Statorfeld weggetragen wird und sich zu drehen beginnt." Persönlich verstehe ich aufgrund einer solchen Erklärung nicht die gesamte Physik des Prozesses, also lassen Sie es uns anders erklären, "an den Fingern".Haben Sie noch ein Video gesehen, wie ein Magnet mit einem Kupferzylinder interagiert? Achten Sie besonders auf den Zeitbereich von 0:49 bis 1:03 - dies ist ein echter Asynchronmotor:Der Effekt ist auf das Auftreten von Wirbelströmen im Zylinder zurückzuführen. Nach dem von Michael Faraday entdeckten Gesetz der elektromagnetischen Induktion tritt bei Änderung des Magnetflusses eines geschlossenen Stromkreises eine EMF auf (nehmen Sie einfach an, dass die Spannung). Diese EMK, wie sie an einen Kupferzylinder angelegt wird, bewirkt sofort, dass ein Strom im Zylinder auftritt. Gleichzeitig erzeugt dieser Strom auch einen eigenen Magnetfluss, der genau in die entgegengesetzte Richtung zu der Änderung des Magnetflusses gerichtet ist, die wir bringen: DerInduktionsstrom, der in einem geschlossenen leitenden Stromkreis entsteht, hat eine solche Richtung, dass das von ihm erzeugte Magnetfeld dieser Änderung des Magnetflusses entgegenwirkt. was diesen Strom verursachte.Dies kann so verstanden werden, dass die geschlossene Schleife der Änderung des Magnetflusses in sich selbst widersteht. Wenn Sie den Magneten scharf zum Kupferzylinder bringen, d.h. Nehmen Sie eine starke Änderung des Magnetflusses vor, dann fließen die Antwortströme im Zylinder, so dass das Magnetfeld im Zylinder zum ersten Zeitpunkt Null ist: Das Magnetfeld des hochgezogenen Magneten wird vollständig durch das Magnetfeld der Zylinderströme kompensiert (natürlich mit Annahmen). Wenn Sie den Magneten halten und halten, nehmen die Ströme im Zylinder aufgrund des vorhandenen Kupferwiderstands allmählich ab, und das durch seine Ströme erzeugte Feld des Zylinders verschwindet: Der Magnetfluss des Permanentmagneten „platzt“ in den Zylinder, als gäbe es keinen Zylinder. Es lohnt sich jedoch, den Magneten zu entfernen.wie der Zylinder wieder reagiert - jetzt wird er versuchen, den verlorenen Magnetfluss in sich selbst "wiederherzustellen", d.h. wird wieder einer Änderung des Magnetflusses widerstehen, in diesem Fall sein Verschwinden. Aber was bedeutet es, den Magnetfluss wiederherzustellen? Dies bedeutet, dass ein Kupferzylinder für einige Zeit bedingt als „Permanentmagnet“ betrachtet werden kann - ein Wirbelstrom zirkuliert darin und erzeugt ein Magnetfeld (Supraleiter in einem Magnetfeld „hängen“ nach demselben Prinzip, aber dies ist eine ganz andere Geschichte).aber das ist eine ganz andere Geschichte).aber das ist eine ganz andere Geschichte).Wenden wir uns nun dem Design eines Induktionsmotors zu. Der Rotor eines Induktionsmotors kann bedingt auch in Form eines Kupferzylinders vorgestellt werden. In realen Konstruktionen ist dies jedoch ein bestimmtes Gitter in Form eines „Eichhörnchenkäfigs“ (Abbildung 1) aus Kupfer oder Aluminium in Kombination mit einem Magnetkreis (beladenes Eisen).Abbildung 1. Der Rotor eines Induktionsmotors vom Typ Käfigläufer mit Strom in einem der Käfigrahmen, der auf eine Zunahme eines externen Magnetfelds reagiert.Die Figur zeigt schematisch den Stromfluss in einem der "Rahmen", d.h. Wenn Sie in einigen Balken eines Eichhörnchenkäfigs einen Magneten von oben mitbringen (erzeugen Sie einen Strom im Stator). Tatsächlich fließt der Strom in diesem Fall in allen Stäben, mit Ausnahme der oberen und unteren Stäbe, für die sich der Fluss nicht ändert (sie würden jedoch auf einen horizontal dargestellten Magneten reagieren).Denken Sie daran, vom Anfang des letzten Artikelsein Bild mit einer schematischen Darstellung einer Zweiphasensynchronmaschine, wo war der Magnet der Rotor? Lassen Sie uns nun einen Induktionsmotor daraus machen: Anstelle eines Magneten werden zwei senkrechte kurzgeschlossene Spulen eingesetzt, die den Kupferzylinder des Rotors symbolisieren (Abbildung 2).Figure 2. Schematische Darstellung eines Zweiphasen-Käfigläufermotors.Das Ersetzen eines Zylinders durch zwei Spulen zur Erläuterung des Funktionsprinzips (oder der Modellierung) ist korrekt, ebenso wie das Ersetzen einer dreiphasigen Wicklung durch eine zweiphasige Wicklung. Nur in diesem Fall ersetzen wir ... die "Endlosphasenwicklung" des Zylinders (eine unendliche Anzahl von Rahmen) durch zwei Spulen mit äquivalenter Induktivität und Widerstand. Schließlich können Sie mit zwei Spulen genau den gleichen Strom- und Magnetflussvektor wie einen Zylinder erzeugen.Und jetzt machen wir eine kurze Zeit aus einer asynchronen Maschine synchron. Wir führen die Achse β in die Spule einGleichstrom und warten Sie zwei oder drei Sekunden, bis die Ansprechströme im Rotor nicht mehr fließen: „Wir bringen einen externen Magneten hoch“. Das heißt, wir warten darauf, dass die Ströme im Rotor abfallen, damit das Magnetfeld des Stators den Rotor „durchbohrt“ und niemand ihn stört. Was passiert jetzt, wenn Sie den Strom im Stator abschalten? Richtig, für die gleichen zwei oder drei Sekunden, während der Strom des Rotors dem entgegengesetzt ist, erhalten wir einen „normalen Magneten“ vom Rotor (Abbildung 3).Abbildung 3. Asynchronmotor: Wenn der Gleichstrom in Phase β gerade abgeschaltet wurde, fließt Strom im Rotor i rd .Worauf warten wir noch? Schneller, bis der Magnet verschwunden ist, zeichnen wir die bekannte d- Achse (wie bei einer Synchronmaschine) und die dazu senkrecht stehende q- Achse senkrecht zum Rotor. Wir schalten die Struktur der Vektorsteuerung der Synchronmaschine ein, legen Strom entlang der q- Achse an und erzeugen einen Moment. Los geht's!Sie können also sogar ein paar Umdrehungen machen, bis unser Zuckermagnet geschmolzen ist und die d- Achsenicht in Vergessenheit geraten. Was tun? Lassen Sie uns den Strom entlang der d-Achse nicht abschalten und unseren Magneten tanken! Und wieder speichern wir die Vektorsteuerungsstruktur der Synchronmaschine, indem wir einfach die Aufgabe entlang der d- Achse senden (zuvor gab es Null). Wir sehen uns also Abbildung 4 an: Die d- , q- Achsen werden vom Positionssensor am Rotor „befestigt“, der Motor steht, der Strom entlang der d- Achse im Stator wird angelegt , der in diesem Fall mit der β- Achse für eine stehende Maschine übereinstimmt . Entlang der q- Achse fließt kein Strom : Wir warten, bis der Rotor „magnetisiert“. Und jetzt speisen wir den aktuellen i sq (s - Stator)! Lass uns gehen!Abbildung 4. Wir legen Strom an die d- Achse an , magnetisieren die Maschine und bereiten alles für die Stromversorgung der Statorachse q vor .Wie weit werden wir mit dieser Methode von Baron Münchhausen gehen? Leider gibt es keine. Sehen Sie, was passiert ist (Abbildung 5):Abbildung 5. Ein Magnet ist ausgerutscht!Der Motor begann sich zu drehen, aber einige Zeit nachdem wir Strom an die q- Achse angelegt hatten , den Gesamtstrom i s gebildet und diesen Vektor an die Position des Rotors „genagelt“ hatten, „bewegte“ sich der Magnet im Rotor heraus! Und stand genau entlang des Vektors i s . Der Rotor versteht nicht, wo wir die Achsen d , q gezeichnet haben ... Es ist ihm egal, ob er sich drehte oder nicht. Es ist wichtig, dass sein interner „induzierter Magnet“ letztendlich gemeinsam mit dem Statormagnetfluss gerichtet werden soll, um dem externen Fluss zu „gehorchen“. Aufgrund des herausgezogenen Magneten hört der Motor auf zu drehen: Nicht nur, dass zwischen dem Rotormagneten und dem Strom i q keine gewünschten 90 Grad vorhanden sind, sondern auch ein Achsenstromd zieht es nun in die entgegengesetzte Richtung und kompensiert das durch den Strom i q erzeugte Moment . Die Methode von Baron Münchhausen schlug fehl.Was tun mit einem schwer fassbaren Rotormagneten? Und lassen Sie uns die Vektorsteuerungsstruktur des Induktionsmotors nicht in den am Rotor angebrachten d , q- Achsen , sondern in anderen Achsen, die genau an der aktuellen Position des „Rotormagneten“ angebracht sind, festlegen - nennen wir sie die x , y- Achsen , um sie von d , q zu unterscheiden. Nach dem "wissenschaftlichen" sind dies Achsen, die entlang der Rotorflussverbindung ausgerichtet sind. Aber woher wissen Sie, wo genau jetzt die Rotorflussverbindung ist, d.h. Wo ist der Magnet im Rotor gedreht? Seine Position hängt ... erstens von der Position des Rotors selbst ab (wir haben einen Positionssensor), zweitens von den Statorströmen (die einen Statorstrom erzeugen, den der Rotormagnet schließlich drehen wird) und drittens von den Parametern der Rotorkette - der Induktivität und dem Widerstand des "Kupferzylinders" (es ist ein Käfig, es ist die Rotorwicklung, es ist die Rotorkette). Wenn man dies alles weiß, kann die Position des „Magneten“ des Rotors einfach unter Verwendung mehrerer Differentialgleichungen berechnet werden. Dies geschieht durch den sogenannten Rotorfluss-Verbindungsbeobachter, der im endgültigen Strukturdiagramm der Vektorsteuerung eines Asynchronmotors farblich hervorgehoben ist (Abbildung 6).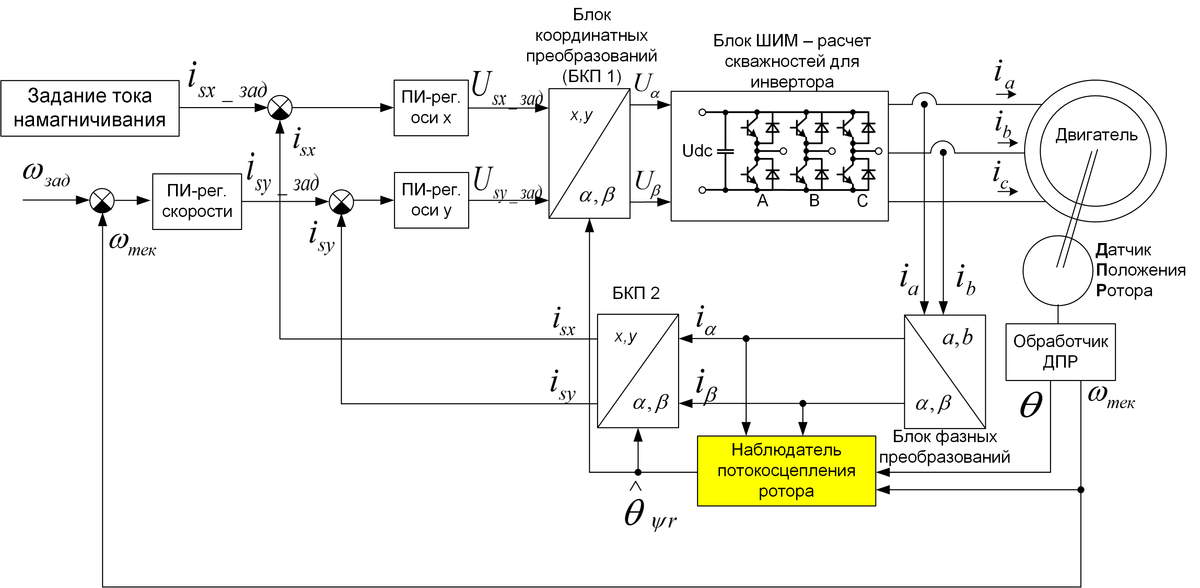
 . Ansonsten ist die Struktur der einer Synchronmaschine völlig ähnlich, nur die d- , q- Achsen werden in x , y umbenannt , und die x- Achse erhält die aktuelle Spezifikation, die unseren „Magneten“ im Rotor trägt. Auch die “ s”Um zu zeigen, dass sich dieser Wert auf den Stator und nicht auf den Rotor bezieht. Es sollte auch beachtet werden, dass in der westlichen Literatur die x- , y- Achse nicht verwendet wird : Für sie ist die d- Achse immer entlang des Rotorfeldes gerichtet, das für einen Asynchronmotor und für einen Synchronmotor gilt. Schon zu Sowjetzeiten haben unsere Wissenschaftler die Achsen d , q und x , y getrennt , um Verwechslungen zu vermeiden: d , q sind am Rotor und x , y am Rotorfeld befestigt .Was stellt sich heraus? Der Rotormagnet gleitet die ganze Zeit von der aktuellen Position am Rotor in Richtung des Stroms der y- Achse. Je größer dieser Strom ist, desto stärker ist der Schlupf. Der Echtzeitbeobachter berechnet die Position dieses Magneten und "verdreht" die x , y- Achse die ganze Zeit vorwärts in Bezug auf die d , q- Achse (Rotorposition). Die x- Achse entspricht immer der aktuellen Position der Flussverbindung im Rotor - der Position des „Magneten“. Das heißt, x , y- AchseLaufen Sie (im Motormodus) immer etwas schneller als die Rotation des Rotors, um den Schlupf darin auszugleichen. Die gemessenen oder modellierten Ströme im Rotor sind sinusförmig. Nur ändern sie sich nicht mit der Frequenz der Statorströme, sondern mit der Frequenz dieses Schlupfes, d.h. sehr langsam. Wenn der Stator des industriellen Asynchron 50 Hz beträgt, beträgt die aktuelle Frequenz im Rotor bei Arbeiten unter Last Einheiten von Hertz. Das ist in der Tat das ganze Geheimnis der Vektorkontrolle für einen Induktionsmotor.Wie ist die Vektorsteuerung eines Induktionsmotors besser als die Skalarisierung? Eine Skalarsteuerung ist eine solche, wenn eine Spannung einer bestimmten Frequenz und Amplitude an den Motor angelegt wird - beispielsweise 380 V 50 Hz. Und es hängt nicht von der Belastung des Rotors ab - keine Strom- und Vektorregler ... Die Spannungsfrequenz und ihre Amplitude werden einfach eingestellt - skalare Größen, und die Ströme und Flüsse im Motor finden einen geeigneten Ort für sich, wie sie wollen. Im stationären Motorbetrieb ist die Vektorsteuerung nicht von der Skalarsteuerung zu unterscheiden - die Vektorsteuerung wendet auch die gleichen Werte an, beispielsweise 380 V, 50 Hz bei Nennlast. Aber unter Übergangsbedingungen ... wenn Sie den Motor mit einem bestimmten Moment schnell starten müssen, wenn Sie ein Bewegungsdiagramm erstellen müssen, wenn eine Impulslast vorliegt,Wenn Sie einen Generatormodus mit einem bestimmten Leistungspegel erstellen müssen, kann diese Skalarsteuerung dies entweder nicht oder mit ekelhaften, langsamen Transienten, die den Frequenzumrichter auch durch Überschreiten des Stroms oder der Spannung des Zwischenkreises (Motors) „ausschalten“ können schwingt und kann in den Generatormodus springen, an den der Frequenzumrichter nicht immer angepasst ist).In der Vektorstruktur "ist alles unter Kontrolle". In dem Moment, in dem Sie sich einstellen, fließt auch der Fluss. Sie können sie auf die richtige Stufe beschränken, um die Schutzeinstellungen nicht zu überschreiten. Es ist möglich, die Ströme kontrolliert zu erzwingen, wenn für kurze Zeit ein um ein Vielfaches größeres Moment erforderlich ist. Es ist möglich, nicht nur das Motormoment, sondern auch den Durchfluss (Strom der x- Achse ) zu regeln : Wenn die Belastung des Motors gering ist, macht es keinen Sinn, den vollen Durchfluss im Rotor aufrechtzuerhalten (wodurch ein Magnet im „Nennmodus“ entsteht) - Sie können ihn schwächen und Verluste reduzieren. Es ist möglich, die Geschwindigkeit mit einem Geschwindigkeitsregler mit hoher Genauigkeit und Geschwindigkeit zu stabilisieren. Sie können einen asynchronen Antrieb als Traktionsantrieb (im Transport) verwenden und das erforderliche Traktionsmoment einstellen. Im Allgemeinen ist für komplexe Anwendungen mit dynamischem Motorbetrieb die Vektorsteuerung eines Induktionsmotors unverzichtbar.Es gibt auch Unterscheidungsmerkmale der Vektorsteuerung eines Asynchronmotors von einem Synchronmotor. Der erste ist der Positionssensor. Wenn wir für einen Synchronantrieb die absolute Position des Rotors kennen müssen, um zu verstehen, wo sich der Magnet befindet, ist dies bei einem Asynchronantrieb nicht erforderlich. Der Rotor hat keine ausgeprägte Polstruktur, der „Magnet“ darin gleitet ständig, und wenn Sie sich die Formeln des Beobachters der Rotorflussverknüpfung ansehen, müssen Sie die Position nicht kennen: Nur die Rotordrehzahl ist in den Formeln enthalten (tatsächlich gibt es jedoch unterschiedliche Formeln im Allgemeinen so). Daher können Sie beim Sensor sparen: Ein herkömmlicher Inkrementalgeber reicht aus, um die Geschwindigkeit (oder sogar einen Tachogenerator) zu verfolgen, absolute Positionssensoren sind nicht erforderlich. Das zweite Merkmal ist die Durchflussregelung in einem Induktionsmotor.Bei einer Synchronmaschine mit Permanentmagneten wird der Durchfluss nicht geregelt, was die maximale Motordrehzahl begrenzt: Die Spannung am Umrichter reicht nicht mehr aus. Wenn dies in einem Induktionsmotor passiert, verringern Sie einfach die Achsenreferenzx und mach weiter! Die maximale Frequenz ist unbegrenzt! Ja, das Motordrehmoment nimmt dadurch ab, aber vor allem können Sie im Gegensatz zu einer Synchronmaschine „nach oben“ gehen (in Wahrheit ist es auch dort möglich, aber nicht weit, nicht für alle Motoren und mit vielen Problemen).In ähnlicher Weise gibt es sensorlose Vektorsteuerungsalgorithmen für einen Induktionsmotor, die den Rotorflusswinkel schätzen, ohne das Signal vom Positions- (oder Drehzahl-) Sensor der Rotorwelle zu verwenden. Ähnlich wie bei Synchronmaschinen gibt es Probleme beim Betrieb solcher Systeme bei einer niedrigen Rotordrehzahl, bei der die Motor-EMK klein ist.Sie sollten auch ein paar Worte über den Rotor sagen. Wenn es für industrielle Asynchronmotoren mit einem Aluminium-Eichhörnchenkäfig billiger wird, können sie in Traktion, wo Gewichts- und Größenindikatoren wichtiger sind, im Gegenteil einen Kupferzylinder verwenden. In all Ihren Lieblings-Tesla-Elektrofahrzeugen gibt es also genau einen asynchronen Elektromotor mit einem Kupferrotor (Abbildung 7).Abbildung 7. Asynchroner Elektromotorrotor Tesla Model S in Stahlummantelung (Foto aus verschiedenen Quellen für verschiedene Jahre)Dies ist eigentlich alles, was ich über den Asynchronmotor sagen wollte. In diesem Übersichtsartikel wurden viele Feinheiten nicht berücksichtigt, wie der Rotorflussregler, die mögliche Konstruktion einer Vektorstruktur in anderen Koordinatenachsen, die Mathematik des Beobachters der Rotorflussverknüpfung und vieles mehr. Wie am Ende des letzten Artikels verweise ich den Leser für weitere Einzelheiten auf moderne Bücher über den Antrieb, zum Beispiel „Anuchin A. S. Elektrische Antriebssteuerungssysteme. MEI, 2015 " .Auf welchem Mikrocontroller Sie eine vollwertige Vektorsteuerung durchführen können, lesen Sie beispielsweise im Artikel „Neuer Mikrocontroller für die Motorsteuerung im Haushalt K1921VK01T von OJSC“ NIIET “.und wie man es debuggt im Artikel "Methoden zum Debuggen von Mikrocontroller-Software in einem elektrischen Laufwerk" . Unsere Firma LLC NPF Vector bietet auch die Entwicklung maßgeschneiderter Steuerungssysteme für Elektromotoren und andere elektrische Geräte an. Beispiele für abgeschlossene Projekte finden Sie auf unserer Website .PSIch entschuldige mich bei den Spezialisten für die nicht ganz korrekte Behandlung mit einigen Begriffen, insbesondere mit den Begriffen „Fluss“, „Flussverknüpfung“, „Magnetfeld“ und anderen - Einfachheit erfordert Opfer ...
. Ansonsten ist die Struktur der einer Synchronmaschine völlig ähnlich, nur die d- , q- Achsen werden in x , y umbenannt , und die x- Achse erhält die aktuelle Spezifikation, die unseren „Magneten“ im Rotor trägt. Auch die “ s”Um zu zeigen, dass sich dieser Wert auf den Stator und nicht auf den Rotor bezieht. Es sollte auch beachtet werden, dass in der westlichen Literatur die x- , y- Achse nicht verwendet wird : Für sie ist die d- Achse immer entlang des Rotorfeldes gerichtet, das für einen Asynchronmotor und für einen Synchronmotor gilt. Schon zu Sowjetzeiten haben unsere Wissenschaftler die Achsen d , q und x , y getrennt , um Verwechslungen zu vermeiden: d , q sind am Rotor und x , y am Rotorfeld befestigt .Was stellt sich heraus? Der Rotormagnet gleitet die ganze Zeit von der aktuellen Position am Rotor in Richtung des Stroms der y- Achse. Je größer dieser Strom ist, desto stärker ist der Schlupf. Der Echtzeitbeobachter berechnet die Position dieses Magneten und "verdreht" die x , y- Achse die ganze Zeit vorwärts in Bezug auf die d , q- Achse (Rotorposition). Die x- Achse entspricht immer der aktuellen Position der Flussverbindung im Rotor - der Position des „Magneten“. Das heißt, x , y- AchseLaufen Sie (im Motormodus) immer etwas schneller als die Rotation des Rotors, um den Schlupf darin auszugleichen. Die gemessenen oder modellierten Ströme im Rotor sind sinusförmig. Nur ändern sie sich nicht mit der Frequenz der Statorströme, sondern mit der Frequenz dieses Schlupfes, d.h. sehr langsam. Wenn der Stator des industriellen Asynchron 50 Hz beträgt, beträgt die aktuelle Frequenz im Rotor bei Arbeiten unter Last Einheiten von Hertz. Das ist in der Tat das ganze Geheimnis der Vektorkontrolle für einen Induktionsmotor.Wie ist die Vektorsteuerung eines Induktionsmotors besser als die Skalarisierung? Eine Skalarsteuerung ist eine solche, wenn eine Spannung einer bestimmten Frequenz und Amplitude an den Motor angelegt wird - beispielsweise 380 V 50 Hz. Und es hängt nicht von der Belastung des Rotors ab - keine Strom- und Vektorregler ... Die Spannungsfrequenz und ihre Amplitude werden einfach eingestellt - skalare Größen, und die Ströme und Flüsse im Motor finden einen geeigneten Ort für sich, wie sie wollen. Im stationären Motorbetrieb ist die Vektorsteuerung nicht von der Skalarsteuerung zu unterscheiden - die Vektorsteuerung wendet auch die gleichen Werte an, beispielsweise 380 V, 50 Hz bei Nennlast. Aber unter Übergangsbedingungen ... wenn Sie den Motor mit einem bestimmten Moment schnell starten müssen, wenn Sie ein Bewegungsdiagramm erstellen müssen, wenn eine Impulslast vorliegt,Wenn Sie einen Generatormodus mit einem bestimmten Leistungspegel erstellen müssen, kann diese Skalarsteuerung dies entweder nicht oder mit ekelhaften, langsamen Transienten, die den Frequenzumrichter auch durch Überschreiten des Stroms oder der Spannung des Zwischenkreises (Motors) „ausschalten“ können schwingt und kann in den Generatormodus springen, an den der Frequenzumrichter nicht immer angepasst ist).In der Vektorstruktur "ist alles unter Kontrolle". In dem Moment, in dem Sie sich einstellen, fließt auch der Fluss. Sie können sie auf die richtige Stufe beschränken, um die Schutzeinstellungen nicht zu überschreiten. Es ist möglich, die Ströme kontrolliert zu erzwingen, wenn für kurze Zeit ein um ein Vielfaches größeres Moment erforderlich ist. Es ist möglich, nicht nur das Motormoment, sondern auch den Durchfluss (Strom der x- Achse ) zu regeln : Wenn die Belastung des Motors gering ist, macht es keinen Sinn, den vollen Durchfluss im Rotor aufrechtzuerhalten (wodurch ein Magnet im „Nennmodus“ entsteht) - Sie können ihn schwächen und Verluste reduzieren. Es ist möglich, die Geschwindigkeit mit einem Geschwindigkeitsregler mit hoher Genauigkeit und Geschwindigkeit zu stabilisieren. Sie können einen asynchronen Antrieb als Traktionsantrieb (im Transport) verwenden und das erforderliche Traktionsmoment einstellen. Im Allgemeinen ist für komplexe Anwendungen mit dynamischem Motorbetrieb die Vektorsteuerung eines Induktionsmotors unverzichtbar.Es gibt auch Unterscheidungsmerkmale der Vektorsteuerung eines Asynchronmotors von einem Synchronmotor. Der erste ist der Positionssensor. Wenn wir für einen Synchronantrieb die absolute Position des Rotors kennen müssen, um zu verstehen, wo sich der Magnet befindet, ist dies bei einem Asynchronantrieb nicht erforderlich. Der Rotor hat keine ausgeprägte Polstruktur, der „Magnet“ darin gleitet ständig, und wenn Sie sich die Formeln des Beobachters der Rotorflussverknüpfung ansehen, müssen Sie die Position nicht kennen: Nur die Rotordrehzahl ist in den Formeln enthalten (tatsächlich gibt es jedoch unterschiedliche Formeln im Allgemeinen so). Daher können Sie beim Sensor sparen: Ein herkömmlicher Inkrementalgeber reicht aus, um die Geschwindigkeit (oder sogar einen Tachogenerator) zu verfolgen, absolute Positionssensoren sind nicht erforderlich. Das zweite Merkmal ist die Durchflussregelung in einem Induktionsmotor.Bei einer Synchronmaschine mit Permanentmagneten wird der Durchfluss nicht geregelt, was die maximale Motordrehzahl begrenzt: Die Spannung am Umrichter reicht nicht mehr aus. Wenn dies in einem Induktionsmotor passiert, verringern Sie einfach die Achsenreferenzx und mach weiter! Die maximale Frequenz ist unbegrenzt! Ja, das Motordrehmoment nimmt dadurch ab, aber vor allem können Sie im Gegensatz zu einer Synchronmaschine „nach oben“ gehen (in Wahrheit ist es auch dort möglich, aber nicht weit, nicht für alle Motoren und mit vielen Problemen).In ähnlicher Weise gibt es sensorlose Vektorsteuerungsalgorithmen für einen Induktionsmotor, die den Rotorflusswinkel schätzen, ohne das Signal vom Positions- (oder Drehzahl-) Sensor der Rotorwelle zu verwenden. Ähnlich wie bei Synchronmaschinen gibt es Probleme beim Betrieb solcher Systeme bei einer niedrigen Rotordrehzahl, bei der die Motor-EMK klein ist.Sie sollten auch ein paar Worte über den Rotor sagen. Wenn es für industrielle Asynchronmotoren mit einem Aluminium-Eichhörnchenkäfig billiger wird, können sie in Traktion, wo Gewichts- und Größenindikatoren wichtiger sind, im Gegenteil einen Kupferzylinder verwenden. In all Ihren Lieblings-Tesla-Elektrofahrzeugen gibt es also genau einen asynchronen Elektromotor mit einem Kupferrotor (Abbildung 7).Abbildung 7. Asynchroner Elektromotorrotor Tesla Model S in Stahlummantelung (Foto aus verschiedenen Quellen für verschiedene Jahre)Dies ist eigentlich alles, was ich über den Asynchronmotor sagen wollte. In diesem Übersichtsartikel wurden viele Feinheiten nicht berücksichtigt, wie der Rotorflussregler, die mögliche Konstruktion einer Vektorstruktur in anderen Koordinatenachsen, die Mathematik des Beobachters der Rotorflussverknüpfung und vieles mehr. Wie am Ende des letzten Artikels verweise ich den Leser für weitere Einzelheiten auf moderne Bücher über den Antrieb, zum Beispiel „Anuchin A. S. Elektrische Antriebssteuerungssysteme. MEI, 2015 " .Auf welchem Mikrocontroller Sie eine vollwertige Vektorsteuerung durchführen können, lesen Sie beispielsweise im Artikel „Neuer Mikrocontroller für die Motorsteuerung im Haushalt K1921VK01T von OJSC“ NIIET “.und wie man es debuggt im Artikel "Methoden zum Debuggen von Mikrocontroller-Software in einem elektrischen Laufwerk" . Unsere Firma LLC NPF Vector bietet auch die Entwicklung maßgeschneiderter Steuerungssysteme für Elektromotoren und andere elektrische Geräte an. Beispiele für abgeschlossene Projekte finden Sie auf unserer Website .PSIch entschuldige mich bei den Spezialisten für die nicht ganz korrekte Behandlung mit einigen Begriffen, insbesondere mit den Begriffen „Fluss“, „Flussverknüpfung“, „Magnetfeld“ und anderen - Einfachheit erfordert Opfer ...Source: https://habr.com/ru/post/de389793/
All Articles