DIY FPV Renndrohne (Teil 1) - Montage
Heute wächst die Popularität von Drohnenrennen rasant. Amateurflyer entwickeln sich zu ernsthaften internationalen Wettbewerben, und die Zahl der Personen, die an diesem Hobby beteiligt sind, nimmt stetig zu. Ich selbst habe kürzlich einen FPV-Quadrocopter der 180. Größe (Abstand in mm zwischen den Achsen der Motoren diagonal) zusammengebaut und beeile mich, diese Erfahrung zu teilen. Ich habe hier und hier den gesamten Montage- und Konfigurationsprozess beschrieben. Im Folgenden finden Sie eine leicht modifizierte Version mit weiteren Informationen aus meinen vorherigen Artikeln.Ich werde die Frage des Beitritts zu diesem Hobby weglassen und direkt zum Quadrocopter gehen.
Ich habe hier und hier den gesamten Montage- und Konfigurationsprozess beschrieben. Im Folgenden finden Sie eine leicht modifizierte Version mit weiteren Informationen aus meinen vorherigen Artikeln.Ich werde die Frage des Beitritts zu diesem Hobby weglassen und direkt zum Quadrocopter gehen.Auswahl der Quadcopter-Größe
Vor einem Jahr waren Quadrocopter der 250. Größe am beliebtesten. Aber jetzt ziehen es Piloten vor, kleinere Geräte zusammenzubauen, was sehr vernünftig ist: Das Gewicht ist geringer, aber die Leistung ist gleich. Ich habe die 180. Größe nicht aus praktischen Gründen gewählt, sondern als eine Art Montageherausforderung.Tatsächlich ist dieser Ansatz zur Auswahl nicht ganz richtig. Es ist viel klüger, zuerst die Größe der Propeller und bereits darunter zu wählen - den kleinsten Rahmen, in den die ausgewählten Propeller passen. Und bei diesem Ansatz wird das 180. Format im Allgemeinen abgelehnt. Überzeugen Sie sich selbst: Im 210. Format können Sie die gleichen 5-Zoll-Propeller wie im 250. Format einsetzen, während das Quadric selbst einfacher ist und 4-Zoll-Propeller in die 160. Rahmen passen. Es stellt sich heraus, dass die 180. Größe ein solches Zwischenformat ist, das "weder unser noch deins" ist. Es kann auch als 160. gewichtet angesehen werden. Aber ich habe es trotzdem gewählt. Vielleicht, weil dies die Mindestgröße ist, mit der die GoPro- oder Runcam-Kamera mehr oder weniger bequem gezogen werden kann.Zubehör
Beginnen wir mit den Motoren. Die „Zwischenstufe“ der 180. Größe sowie der Reichtum ihres Sortiments erschweren die Auswahl. Einerseits können Sie nehmen, was am 160. geht, andererseits, was am 210. oder sogar 250. installiert ist. Es ist notwendig, von den Propellern und der Batterie (die Anzahl der Dosen) auszugehen. Ich sehe keinen Grund, eine 3S-Batterie zu verwenden, und für Propeller gelten folgende allgemeine Regeln:- benötigen maximalen statischen Schub - vergrößern Sie den Durchmesser des Propellers und verringern Sie die Steigung (innerhalb angemessener Grenzen)
- benötigen hohe Geschwindigkeit - reduzieren Sie den Durchmesser und erhöhen Sie die Stufe (innerhalb angemessener Grenzen)
- Sie benötigen einen hohen Schub bei kleinem Durchmesser - addieren Sie die Anzahl der Blätter (wieder innerhalb angemessener Grenzen, denn wenn der Unterschied zwischen den zwei- und dreiflügeligen Propellern spürbar ist, ist er zwischen den drei- und vierblättrigen Propellern nicht so groß).
In meinem Fall habe ich eine Propellergrößenbeschränkung von 4 Zoll, aber keine Motorbeschränkung. Daher ist es am sinnvollsten, dreiflügelige 4045-Bullnose-Propeller zu verwenden. Sie sind schwer zu balancieren, aber mit ihnen sind die Bedienelemente reaktionsschneller und vorhersehbarer, und der Klang ist leiser. Andererseits ist bei zweiblättrigen Propellern die Geschwindigkeit des Quadrocopters höher, aber das brauche ich definitiv nicht. "Populär" in den 180er Jahren herrschen folgende Einstellungen vor:- Leichtgewicht mit Motoren 1306-3100KV, herkömmlichen 4045-Propellern und 850-mAh-Batterie
- Schwer und leistungsstark für dreiflügelige Bullnose-Propeller und eine Action-Kamera mit 2205-2600-kV-Motoren und einer 1300-mAh-Batterie
Mit dem Rahmen können Sie Motoren von 1306-4000 kV bis 22XX-2700 kV einsetzen. Ich weiß übrigens nicht warum, aber Motoren mit 1806-2300 kV sind jetzt in Ungnade gefallen und werden wenig benutzt.Ich habe die Motoren für meinen Quadric genommen - RCX H2205 2633KV . Erstens wollte ich einen Spielraum haben (obwohl mit meinen bescheidenen Pilotenfähigkeiten nicht klar ist, warum). Zweitens sind meine Setups nie superleicht geworden, außerdem habe ich vor, eine Action-Kamera mitzunehmen. Insbesondere RCX-Motoren sind eine Kompromissoption. Sie sind billig, aber es gibt viele Beschwerden über die Qualität. Zum Zeitpunkt des Kaufs von Komponenten war dies einer der wenigen 2205-2600-kV-Motoren auf dem Markt. Jetzt (zum Zeitpunkt des Schreibens) ist der Bereich viel größer und es ist besser, etwas anderes zu wählen.Bei den restlichen Komponenten handelte er nach dem Prinzip "mehr Herausforderung":- RC180 V2. ( 2-3 ), , 3. , , , , 1-2 .
- FrSky D4R-II. FrSky X4R-SB, , . , . .
- FVT LittleBee 20A — , . - FVT LittleBee 20A PRO Silabs F396 ( , Silabs F330), FVT LittleBee 20A-S, BLHeli_S. LittleBee 20A.
- Foxeer FX799T — , .
- Sony Super HAD CCD 600TVL (IR Block, NTSC, 2.8). Foxeer XAT600M, .
- Diatone.
- -«» BeeRotor -.
- MICRO MinimOSD.
- , . Matek Mini Power Hub, . , 3S, PBD .
- Turnigy nano-tech 1300mAh 4S 45~90C.
- ZG 12Bit WS2812B LED Board. , , - ( ) . .
- DYS 3-blade 4040 Bullnose.
Auswahl des Flugreglers
Sie haben wahrscheinlich bemerkt, dass die Liste keinen Flugregler enthält. Ich möchte seine Wahl genauer beschreiben. Kostengünstige Build-Kits enthalten häufig einen CC3D-Controller. Daher ist dies derzeit wahrscheinlich der billigste PC. Heute macht es absolut keinen Sinn, eine CC3D zu kaufen. Es ist veraltet und verfügt nicht über die notwendigen Dinge wie Batterieüberwachung und Hochtöner. Sein Nachfolger, CC3D Revolution, ist ein völlig anderes Produkt mit umfangreichen Funktionen, aber auch zu einem Preis von über 40 €.Moderne Flugsteuerungen haben bereits von F1-Prozessoren auf F3 umgestellt, wodurch die Naze32-PCs der letzten Generation hergestellt und der Preis erheblich gesenkt wurden. Jetzt ist es wirklich ein Folk-Controller, der fast alles hat, was die Seele zu einem Preis von 12 € oder mehr wünscht.Von der neuen PC-Generation ist Seriously Pro Racing F3 das beliebteste und vor allem aufgrund der Verfügbarkeit kostengünstiger Klone. Der Controller selbst ist Naze32 in keiner Weise unterlegen. Außerdem verfügt er über einen schnellen F3-Prozessor, eine große Speichermenge, drei UART-Ports und einen Wechselrichter für S.Bus. Es SPRacingF3 Acro ich gewählt habe. Der Rest der modernen PCs wurde aufgrund des Preises oder einiger spezifischer Merkmale (geschlossene Firmware, Layout usw.) nicht berücksichtigt.Ich werde die derzeitige modische Tendenz, mehrere Karten zu einer zu kombinieren, separat erwähnen. Meistens, PC und OSD oder PC und PDB, unterstütze ich diese Idee mit einigen Ausnahmen nicht. Ich möchte nicht den gesamten Flugregler aufgrund eines verbrannten OSD ändern. Darüber hinaus bringt eine solche Vereinigung, wie die Praxis zeigt, manchmal Probleme mit sich .Schaltplan
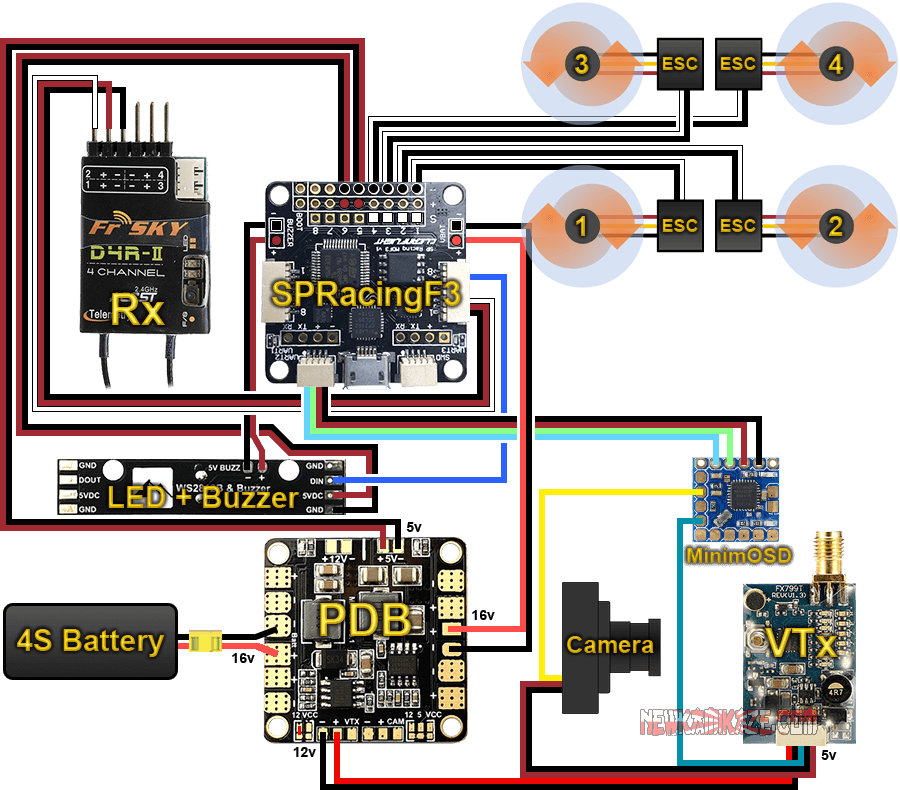
Es ist klar, dass alle Komponenten, die 5 V oder 12 V benötigen, diese von den BECs der Stromverteilungsplatine erhalten. Die Kamera könnte theoretisch direkt von einer 4S-Batterie gespeist werden, da die Eingangsspannung dies zulässt, dies sollte jedoch in keinem Fall erfolgen. Erstens sind alle Kameras sehr anfällig für Störungen im Stromkreis der Regler, die zu Bildstörungen führen. Zweitens geben Regler mit aktiver Bremsung (wie mein LittleBee), wenn diese Bremse aktiviert ist, dem Bordnetz einen sehr ernsten Impuls, der die Kamera verbrennen kann. Darüber hinaus hängt das Vorhandensein eines Impulses direkt vom Batterieverschleiß ab. Die neuen nicht, aber die alten. Hier ist ein informatives Video zum Thema Störungen durch Regulierungsbehörden und deren Filterung. Es ist daher besser, die Kamera entweder über BEC oder über einen Videosender mit Strom zu versorgen.Um die Bildqualität zu verbessern, wird empfohlen, nicht nur ein Signalkabel von der Kamera am OSD, sondern auch den Boden zu verwenden. Wenn Sie diese Drähte zu einem „Pigtail“ verdrehen, fungiert die „Erde“ als Abschirmung für das Signalkabel. Richtig, in diesem Fall habe ich nicht.Wenn wir bereits über die "Erdung" sprechen, wird oft darüber gestritten, ob die "Erdung" von den Reglern an einen PC oder nur an ein Signalkabel angeschlossen werden soll. Bei einem herkömmlichen Quadrocopter müssen Sie unbedingt eine Verbindung herstellen. Das Fehlen kann zu Synchronisationsfehlern führen ( Bestätigung ).Der endgültige Schaltplan fiel einfach und prägnant aus, aber mit ein paar Nuancen:- Versorgung des Flugreglers (5V) vom PDB über Ausgänge für Regler
- Schalten Sie das Radio (5 V) vom PC über den OI_1-Anschluss ein
- Stromversorgung eines Videosenders (12V) vom PDB
- Kameraleistung (5 V) von einem Videosender
- OSD mit UART2 verbunden. Viele Leute verwenden UART1 dafür, aber wie bei Naze32 ist dieser Anschluss hier parallel zu USB.
- Vbat ist mit dem PC verbunden, nicht mit dem OSD. Theoretisch können die Batteriespannungswerte (vbat) sowohl auf dem OSD als auch auf dem PC abgelesen werden, indem die Batterie entweder an die eine oder die andere angeschlossen wird. Was ist der Unterschied? Im ersten Fall werden die Messwerte nur auf dem Bildschirm des Monitors oder der Brille angezeigt, und der PC weiß nichts darüber. Im zweiten Fall kann der PC die Batteriespannung überwachen, den Piloten darüber informieren (z. B. „Quietscher“) und diese Daten auch an das OSD, an die „Black Box“ und per Telemetrie an die Fernbedienung übertragen. Das Einstellen der Messgenauigkeit ist auch über einen PC einfacher. Das heißt, das Anschließen von vbat an den Flugregler ist sehr vorzuziehen.
Montage
Hier einige allgemeine Tipps zur Montage:- . , .
- , , , . , , . , .
- PLASTIK 71, . , , .
- . .
- «» ().
Ich beginne die Montage lieber mit Motoren und Reglern. Hier ist ein gutes Video zum Zusammenbau eines kleinen Quadrocopters, aus dem ich die Idee übernommen habe, die Drähte der Motoren anzuordnen.Ich möchte auch zur Montage der Regler sagen: Wo und mit was? Sie können am und unter dem Balken befestigt werden. Ich habe mich für die erste Option entschieden, da mir der Regler in dieser Position besser geschützt zu sein scheint (dies sind meine Spekulationen, die von der Praxis nicht bestätigt wurden). Wenn der Regler auf einem Balken montiert ist, wird er außerdem durch die Luft des Propellers perfekt gekühlt. Nun erfahren Sie, wie Sie den Regler reparieren. Es gibt viele Möglichkeiten, die beliebtesten - doppelseitiges Klebeband + ein oder zwei Estriche. "Billig und fröhlich", außerdem wird der Abbau der Schwierigkeiten nicht verursachen. Schlimmer noch, mit einem solchen Befestigungselement können Sie die Reglerplatine (wenn Sie einen Koppler darauf setzen) oder Drähte (wenn Sie sie befestigen) beschädigen. Also beschloss ich, die Regler mit einem Schrumpfschlauch (25 mm) zu befestigen und sie mit den Trägern zusammenzulöten. Es gibt eine Einschränkung: Der Regler selbst muss ebenfalls in Schrumpfschlauch sein (meine wurden darin verkauft).um nicht mit der Kohlefaser des Strahls in Kontakt zu kommen, sonst - Kurzschluss. Es ist auch sinnvoll, ein Stück doppelseitiges Klebeband von unten auf jeden Balken an der Motorhalterung zu kleben. Erstens schützt es das Motorlager vor Staub. Zweitens, wenn aus irgendeinem Grund einer der Bolzen gelöst wird, fällt er während des Fluges nicht heraus und geht nicht verloren.Bei der Montage des Rahmens habe ich keine einzige Schraube aus dem Bausatz verwendet, da sie alle unangemessen kurz sind. Stattdessen wurde ich etwas länger und hatte einen Kopf für einen Kreuzschlitzschraubendreher (es gibt so eine persönliche Präferenz).Die Kamera passte nicht in die Breite zwischen den Seitenplatten des Rahmens. Verarbeitete die Kanten ihres Bretts leicht mit einer Feile (es war wahrscheinlicher, dass sie Rauheit schleifte) und sie stand ohne Probleme auf. Aber die Schwierigkeiten endeten nicht dort. Die Qualität des Halters für die Kamera von Diatone hat mir sehr gut gefallen, aber die Kamera damit passte nicht in die Höhe des Rahmens (ca. 8-10 mm). Zuerst steckte ich den Halter an der äußeren (oberen) Seite der Platte durch einen Neopren-Dämpfer, aber das Design erwies sich als unzuverlässig. Später kam die Idee der einfachsten und zuverlässigsten Befestigung. Ich nahm nur eine Klammer von Diatones Halterung und legte sie auf ein Stück Stange mit M3-Gewinde. Um zu verhindern, dass sich die Kamera seitwärts bewegt, habe ich die Klemme mit Nylonkupplungen befestigt.
Es ist auch sinnvoll, ein Stück doppelseitiges Klebeband von unten auf jeden Balken an der Motorhalterung zu kleben. Erstens schützt es das Motorlager vor Staub. Zweitens, wenn aus irgendeinem Grund einer der Bolzen gelöst wird, fällt er während des Fluges nicht heraus und geht nicht verloren.Bei der Montage des Rahmens habe ich keine einzige Schraube aus dem Bausatz verwendet, da sie alle unangemessen kurz sind. Stattdessen wurde ich etwas länger und hatte einen Kopf für einen Kreuzschlitzschraubendreher (es gibt so eine persönliche Präferenz).Die Kamera passte nicht in die Breite zwischen den Seitenplatten des Rahmens. Verarbeitete die Kanten ihres Bretts leicht mit einer Feile (es war wahrscheinlicher, dass sie Rauheit schleifte) und sie stand ohne Probleme auf. Aber die Schwierigkeiten endeten nicht dort. Die Qualität des Halters für die Kamera von Diatone hat mir sehr gut gefallen, aber die Kamera damit passte nicht in die Höhe des Rahmens (ca. 8-10 mm). Zuerst steckte ich den Halter an der äußeren (oberen) Seite der Platte durch einen Neopren-Dämpfer, aber das Design erwies sich als unzuverlässig. Später kam die Idee der einfachsten und zuverlässigsten Befestigung. Ich nahm nur eine Klammer von Diatones Halterung und legte sie auf ein Stück Stange mit M3-Gewinde. Um zu verhindern, dass sich die Kamera seitwärts bewegt, habe ich die Klemme mit Nylonkupplungen befestigt.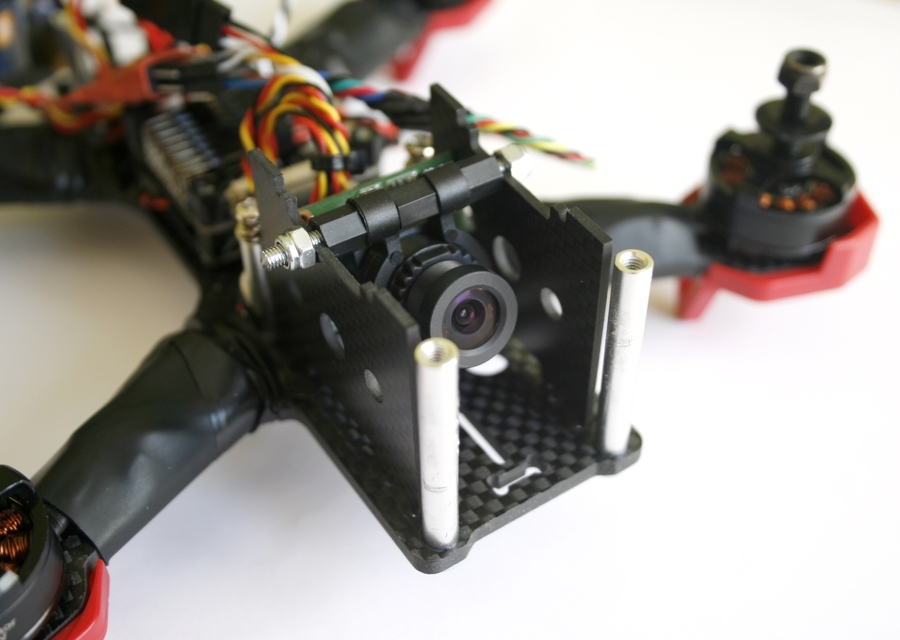 Mir hat sehr gut gefallen, dass nur Steckverbinder für Regler von den Steckverbindern am PC verlötet werden mussten. Volle dreipolige Stecker passten nicht in meine Größe, ich musste zum Trick gehen und zweipolige verwenden. Für die ersten fünf Kanäle (4 für Regler + 1 "für jeden Feuerwehrmann") habe ich die Stecker mit dem Signalpad und der "Masse" verlötet, für die anderen drei - mit "Plus" und "Masse", damit der PC selbst mit Strom versorgt werden kann und bereits von dort aus - Hintergrundbeleuchtung. Da die chinesischen Klone von Fluglotsen durch unzuverlässige Fixierung des USB-Steckers sündigen, habe ich ihn auch gelötet. Ein weiteres Merkmal des SPRacingF3-Klons ist der Hochtöneranschluss. Wie im Fall von vbat befindet sich auf der Oberseite der Platine ein zweipoliger JST-XH-Anschluss, und auf der Unterseite wird er von den Kontaktflächen dupliziert. Der Trick istdass der Erdungsklon am Anschluss konstant ist und bei Verwendung immer der Hochtöner aktiviert wird. Normales Arbeiten für den "Hochtöner" "Erde" wird nur auf dem Kontaktfeld angezeigt. Dies kann vom Tester leicht überprüft werden: Das „Plus“ des Steckers wird mit einem „Plus“ auf dem Kontaktfeld angezeigt, und das „Minus“ - ruft nicht an. Daher müssen Sie die Drähte für den "Hochtöner" an der Unterseite des PCs anlöten.
Mir hat sehr gut gefallen, dass nur Steckverbinder für Regler von den Steckverbindern am PC verlötet werden mussten. Volle dreipolige Stecker passten nicht in meine Größe, ich musste zum Trick gehen und zweipolige verwenden. Für die ersten fünf Kanäle (4 für Regler + 1 "für jeden Feuerwehrmann") habe ich die Stecker mit dem Signalpad und der "Masse" verlötet, für die anderen drei - mit "Plus" und "Masse", damit der PC selbst mit Strom versorgt werden kann und bereits von dort aus - Hintergrundbeleuchtung. Da die chinesischen Klone von Fluglotsen durch unzuverlässige Fixierung des USB-Steckers sündigen, habe ich ihn auch gelötet. Ein weiteres Merkmal des SPRacingF3-Klons ist der Hochtöneranschluss. Wie im Fall von vbat befindet sich auf der Oberseite der Platine ein zweipoliger JST-XH-Anschluss, und auf der Unterseite wird er von den Kontaktflächen dupliziert. Der Trick istdass der Erdungsklon am Anschluss konstant ist und bei Verwendung immer der Hochtöner aktiviert wird. Normales Arbeiten für den "Hochtöner" "Erde" wird nur auf dem Kontaktfeld angezeigt. Dies kann vom Tester leicht überprüft werden: Das „Plus“ des Steckers wird mit einem „Plus“ auf dem Kontaktfeld angezeigt, und das „Minus“ - ruft nicht an. Daher müssen Sie die Drähte für den "Hochtöner" an der Unterseite des PCs anlöten.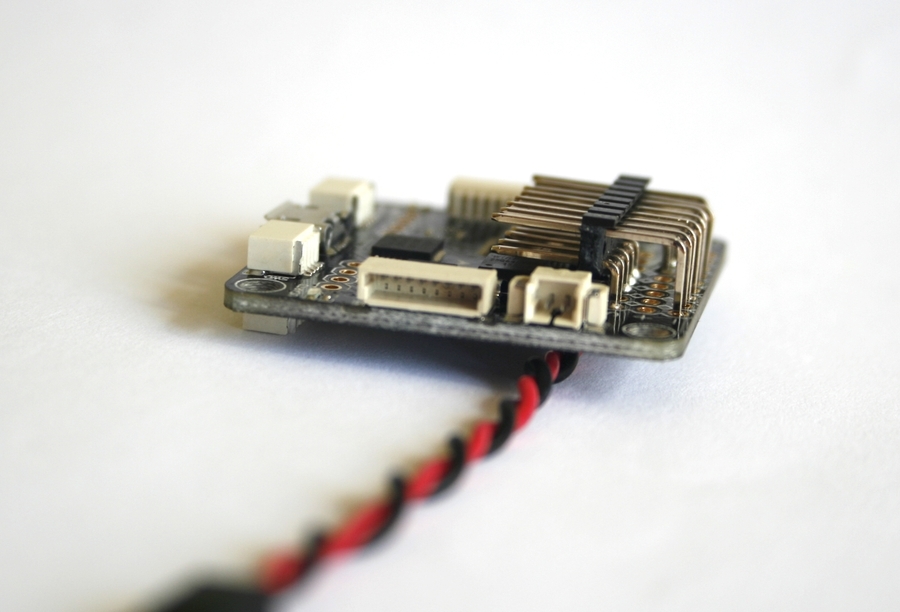 Die dreipoligen Stecker der Regler mussten ebenfalls ausgetauscht werden. Es war möglich, vier zweipolige Stecker zu verwenden, aber stattdessen nahm ich zwei vierpolige Stecker und steckte alle Steuerungen in eine „Masse“ und ein Signalkabel in die zweite (gemäß der Reihenfolge des Anschlusses der Motoren).
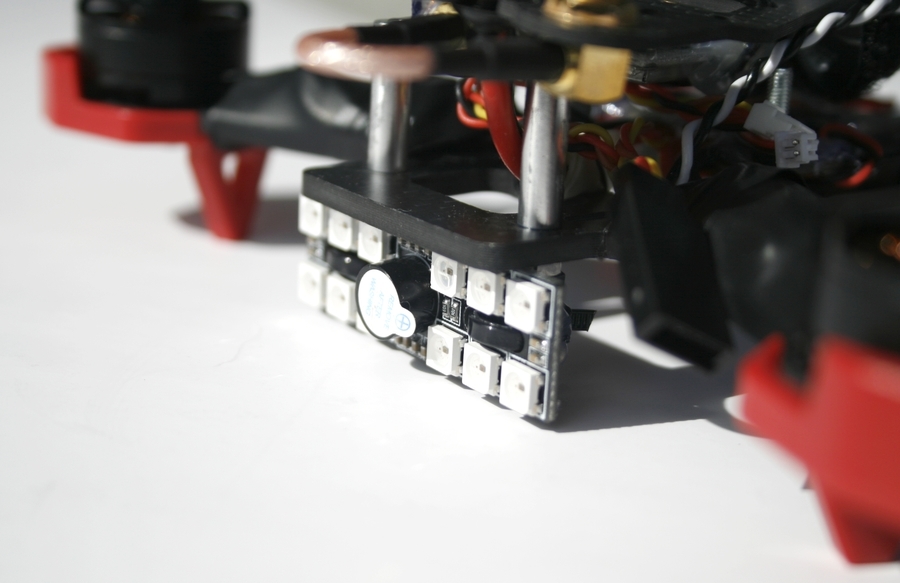
Die dreipoligen Stecker der Regler mussten ebenfalls ausgetauscht werden. Es war möglich, vier zweipolige Stecker zu verwenden, aber stattdessen nahm ich zwei vierpolige Stecker und steckte alle Steuerungen in eine „Masse“ und ein Signalkabel in die zweite (gemäß der Reihenfolge des Anschlusses der Motoren).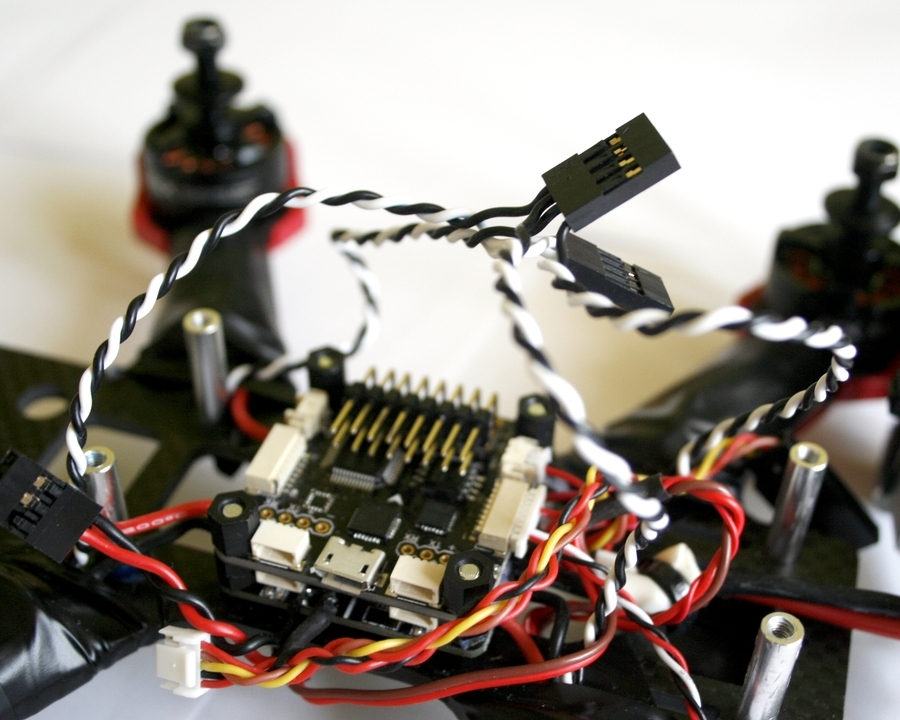 Die hintergrundbeleuchtete Platte ist breiter als der Rahmen und steht an den Seiten hervor. Der einzige Ort, an dem die Propeller nicht darauf treffen, ist unter dem Rahmen. Ich musste kollektiv arbeiten: Ich nahm lange Schrauben, setzte Nylonkupplungen mit vorgefertigten Schlitzen auf (damit die die Hintergrundbeleuchtung befestigenden Kabelbinder einrasten konnten) und schraubte sie durch die Bodenplatte in die Rahmengestelle. Er zog die Platte mit LEDs mit Krawatten an die resultierenden Beine (die Löcher in der Platte passten perfekt) und füllte die Krawatten mit Heißkleber. Von der Rückseite der Platte gelötete Steckverbinder.Bereits nach dem Zusammenbau stellte sich in der Einrichtungsphase heraus, dass etwas mit dem Quietscher nicht stimmte. Unmittelbar nach dem Anschließen der Batterie begann sie monoton zu quietschen, und wenn Sie sie über die Fernbedienung aktivieren, wurde dieses monotone Quietschen auch rhythmisch überlagert. Zuerst habe ich auf einem PC gesündigt, aber nachdem ich die Spannung mit einem Multimeter gemessen hatte, wurde klar, wo genau das Problem lag. Tatsächlich war es von Anfang an möglich, eine normale LED an die Hochtönerkabel anzuschließen. Infolgedessen bestellte ich mehrere Hochtöner gleichzeitig, hörte ihnen zu und stellte den lautesten ein.
Die hintergrundbeleuchtete Platte ist breiter als der Rahmen und steht an den Seiten hervor. Der einzige Ort, an dem die Propeller nicht darauf treffen, ist unter dem Rahmen. Ich musste kollektiv arbeiten: Ich nahm lange Schrauben, setzte Nylonkupplungen mit vorgefertigten Schlitzen auf (damit die die Hintergrundbeleuchtung befestigenden Kabelbinder einrasten konnten) und schraubte sie durch die Bodenplatte in die Rahmengestelle. Er zog die Platte mit LEDs mit Krawatten an die resultierenden Beine (die Löcher in der Platte passten perfekt) und füllte die Krawatten mit Heißkleber. Von der Rückseite der Platte gelötete Steckverbinder.Bereits nach dem Zusammenbau stellte sich in der Einrichtungsphase heraus, dass etwas mit dem Quietscher nicht stimmte. Unmittelbar nach dem Anschließen der Batterie begann sie monoton zu quietschen, und wenn Sie sie über die Fernbedienung aktivieren, wurde dieses monotone Quietschen auch rhythmisch überlagert. Zuerst habe ich auf einem PC gesündigt, aber nachdem ich die Spannung mit einem Multimeter gemessen hatte, wurde klar, wo genau das Problem lag. Tatsächlich war es von Anfang an möglich, eine normale LED an die Hochtönerkabel anzuschließen. Infolgedessen bestellte ich mehrere Hochtöner gleichzeitig, hörte ihnen zu und stellte den lautesten ein.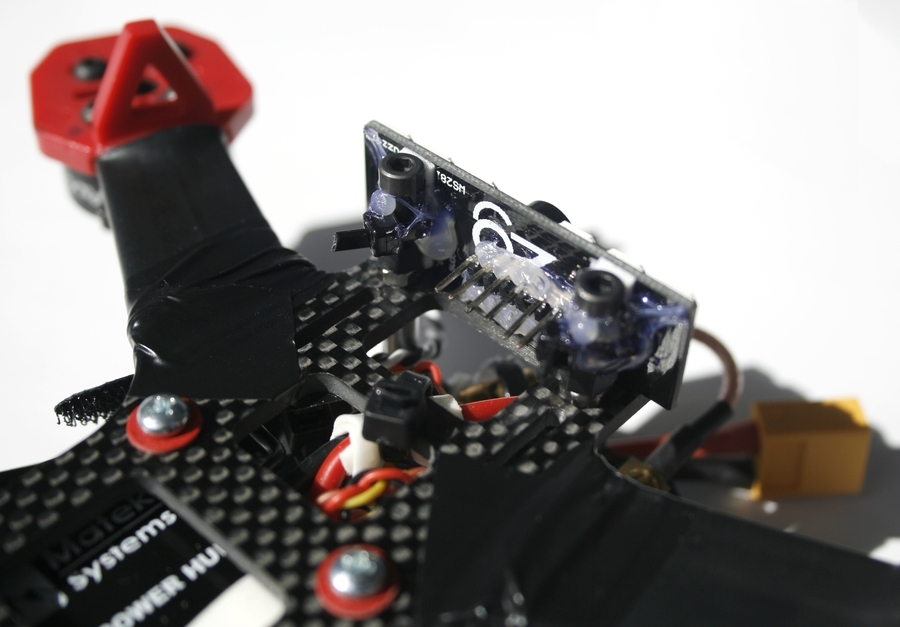
 Oft werden der PDB und der Controller mit Nylonschrauben am Rahmen befestigt, aber ich vertraue ihrer Stärke nicht. Also habe ich 20mm Metallschrauben und Nylonkupplungen verwendet. Nach der Installation des PDB löte ich die Stromversorgung an die Regler (die anderen Drähte wurden im Voraus gelötet) und füllte die Lötstellen mit Heißkleber. Ich habe das Hauptstromkabel, das zur Batterie führt, am Rahmen befestigt, damit es im Falle eines Unfalls nicht herausgerissen wird.
Oft werden der PDB und der Controller mit Nylonschrauben am Rahmen befestigt, aber ich vertraue ihrer Stärke nicht. Also habe ich 20mm Metallschrauben und Nylonkupplungen verwendet. Nach der Installation des PDB löte ich die Stromversorgung an die Regler (die anderen Drähte wurden im Voraus gelötet) und füllte die Lötstellen mit Heißkleber. Ich habe das Hauptstromkabel, das zur Batterie führt, am Rahmen befestigt, damit es im Falle eines Unfalls nicht herausgerissen wird.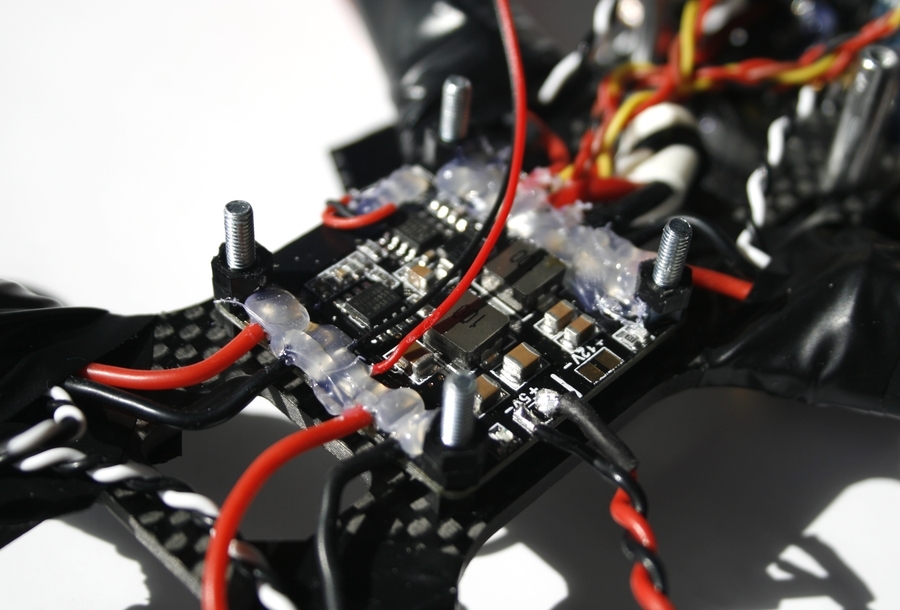 Ich entfernte alle Anschlüsse mit einer Zange vom Empfänger, mit Ausnahme der erforderlichen drei, und entfernte den Jumper zwischen dem dritten und vierten Kanal direkt auf der Platine. Wie ich oben geschrieben habe, wäre es klüger, einen Empfänger ohne Stecker zu nehmen. Ich setzte auch Antennen bei ihm ein und schmolz zu Schrumpfschlauch. Auf dem Rahmen passt der Empfänger gut zwischen das PBD und die hintere Säule. Bei dieser Anordnung sind die Anzeigen deutlich sichtbar und es besteht Zugriff auf den Bindeknopf.
Ich entfernte alle Anschlüsse mit einer Zange vom Empfänger, mit Ausnahme der erforderlichen drei, und entfernte den Jumper zwischen dem dritten und vierten Kanal direkt auf der Platine. Wie ich oben geschrieben habe, wäre es klüger, einen Empfänger ohne Stecker zu nehmen. Ich setzte auch Antennen bei ihm ein und schmolz zu Schrumpfschlauch. Auf dem Rahmen passt der Empfänger gut zwischen das PBD und die hintere Säule. Bei dieser Anordnung sind die Anzeigen deutlich sichtbar und es besteht Zugriff auf den Bindeknopf.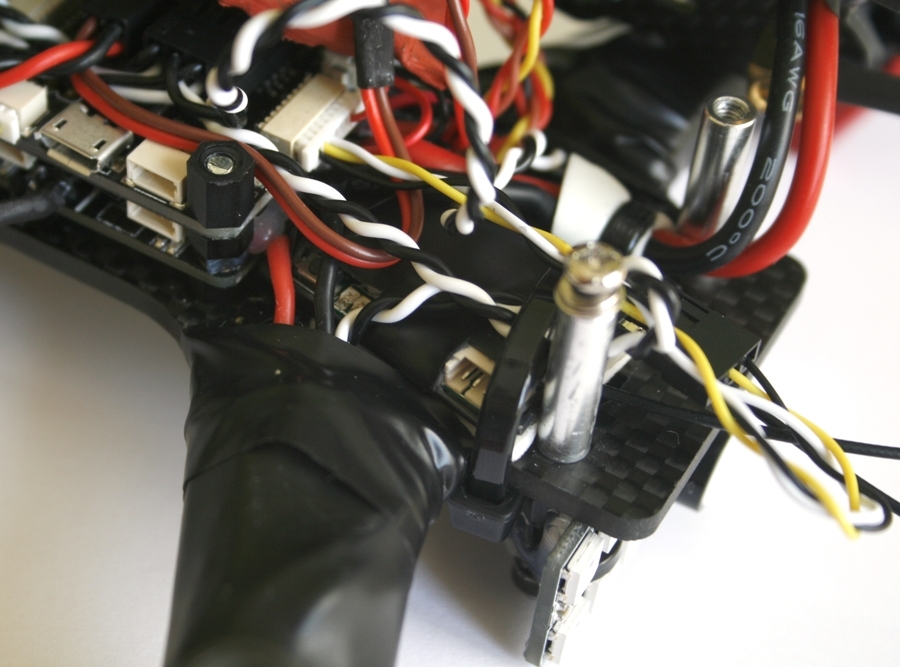 Ich befestigte den Videosender mit Kabelbindern und Heißkleber an der oberen Platte des Rahmens, so dass durch den Schlitz Zugang zum Kanalumschaltknopf und den LED-Anzeigen bestand.
Ich befestigte den Videosender mit Kabelbindern und Heißkleber an der oberen Platte des Rahmens, so dass durch den Schlitz Zugang zum Kanalumschaltknopf und den LED-Anzeigen bestand.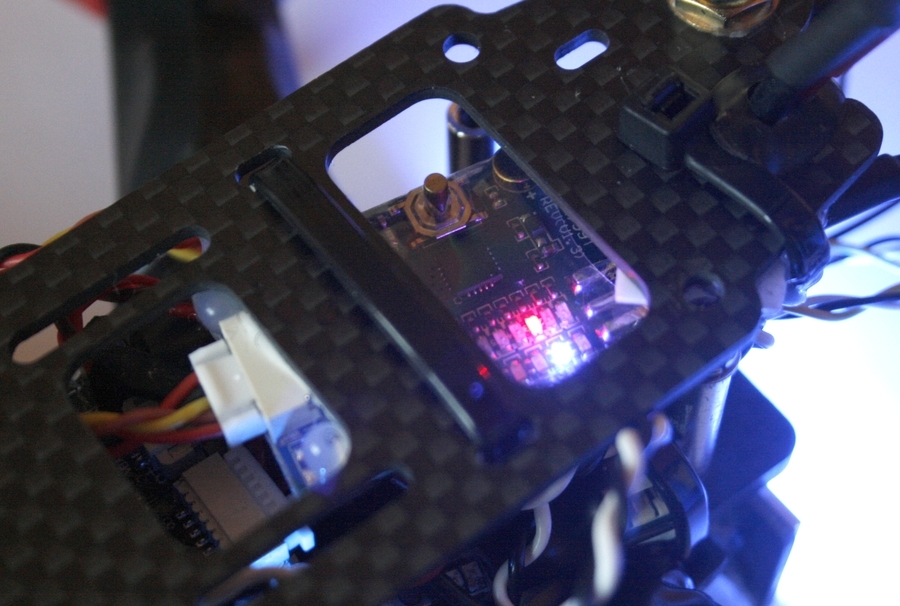 Im Rahmen befindet sich ein spezielles Loch zum Anbringen der Videosenderantenne. Schließen Sie es jedoch nicht direkt an den Sender an. Es stellt sich eine Art Hebel heraus, bei dem die Antenne als eine Schulter dient, der Sender selbst mit allen Drähten als die andere, und der Befestigungspunkt des Steckers der Drehpunkt ist, der die maximale Last hat. Im Falle eines Unfalls mit einer Wahrscheinlichkeit von fast 100% bricht der Stecker auf der Senderplatine ab. Daher müssen Sie die Antenne über einen Adapter oder ein Verlängerungskabel montieren.Für MinimOSD habe ich beschlossen, die Steckverbinder und nicht die Drähte direkt zu löten. In den Foren schreiben sie, dass dieses Board oft durchbrennt, daher ist es ratsam, sich sofort auf einen möglichen Austausch vorzubereiten. Ich nahm die Stange mit Anschlüssen in zwei Reihen, löte die unteren mit Löchern an die Pads und brachte vIn und vOut zu den oberen. Danach füllte er die Lötstellen mit Heißkleber und verpackte die gesamte Platte in Schrumpfschlauch.
Im Rahmen befindet sich ein spezielles Loch zum Anbringen der Videosenderantenne. Schließen Sie es jedoch nicht direkt an den Sender an. Es stellt sich eine Art Hebel heraus, bei dem die Antenne als eine Schulter dient, der Sender selbst mit allen Drähten als die andere, und der Befestigungspunkt des Steckers der Drehpunkt ist, der die maximale Last hat. Im Falle eines Unfalls mit einer Wahrscheinlichkeit von fast 100% bricht der Stecker auf der Senderplatine ab. Daher müssen Sie die Antenne über einen Adapter oder ein Verlängerungskabel montieren.Für MinimOSD habe ich beschlossen, die Steckverbinder und nicht die Drähte direkt zu löten. In den Foren schreiben sie, dass dieses Board oft durchbrennt, daher ist es ratsam, sich sofort auf einen möglichen Austausch vorzubereiten. Ich nahm die Stange mit Anschlüssen in zwei Reihen, löte die unteren mit Löchern an die Pads und brachte vIn und vOut zu den oberen. Danach füllte er die Lötstellen mit Heißkleber und verpackte die gesamte Platte in Schrumpfschlauch. Der letzte Schliff ist der Telefonnummernaufkleber. Es wird zumindest ein wenig Hoffnung geben, falls ein Quadrocopter verloren geht.
Der letzte Schliff ist der Telefonnummernaufkleber. Es wird zumindest ein wenig Hoffnung geben, falls ein Quadrocopter verloren geht. Die Versammlung dazu ging zu Ende. Es stellte sich als kompakt heraus und gleichzeitig blieb der Zugang zu allen notwendigen Leitungsgremien erhalten. Weitere Fotos finden Sie hier.. Die Masse der Quadrocoprera ohne Batterie beträgt 330 g, mit einer Batterie - 470 g. Und das ohne Actionkamera und montiert dafür. Im nächsten Artikel werde ich über Firmware und das Einstellen des resultierenden Quadrocopters sprechen.
Die Versammlung dazu ging zu Ende. Es stellte sich als kompakt heraus und gleichzeitig blieb der Zugang zu allen notwendigen Leitungsgremien erhalten. Weitere Fotos finden Sie hier.. Die Masse der Quadrocoprera ohne Batterie beträgt 330 g, mit einer Batterie - 470 g. Und das ohne Actionkamera und montiert dafür. Im nächsten Artikel werde ich über Firmware und das Einstellen des resultierenden Quadrocopters sprechen. Source: https://habr.com/ru/post/de395455/
All Articles