„Der Ursprung des Projekts. Teil 1.1. Wie ich einen Telepräsenzroboter auf einem Radstand zusammenbaue. “ Ausdauertechnologie
Projekt: Ausdauerroboter & Lasertechnologien.Artikel Nr. 1. „Der Ursprung des Projekts. Teil 1.1. Wie ich einen Telepräsenzroboter auf einem Radstand zusammenbaue. “Bis 2015 konnten die Mitglieder unseres zukünftigen Teams genug Geld verdienen, um ihre Zeit langfristig zu riskieren (sie legten einen Planungshorizont von 1 Jahr fest). Und wir haben beschlossen, ein Startup zu organisieren. Verkaufen? Nein, Tech-Startup! Die Entwicklung von Robotern und Festkörperlasern mit einer Leistung in der Größenordnung von 1-10 Watt.Mir hat sofort die Idee gefallen, zur richtigen Zeit an einem interessanten Ort für Tausende von Kilometern zu sein und es immer noch zu mögen! Wir alle lieben Live-Streaming. Und dank des Roboters kontrolliere ich auch die Richtung meines Blicks, meinen Aufenthaltsort. Als wir 2015 das Endurance Robots-Projekt starteten, begann ich mit der Entwicklung eines Telepräsenzroboters auf Rädern. Mit dem Radstand können Sie sich im Raum oder auf der Straße bewegen, und durch Telepräsenz wird die Relevanz des Geschehens in der Situation sichergestellt. Das ultimative Ziel: vollständige virtuelle Realität, ein Roboter, der von einer Person mithilfe einer Oculus Rift-Brille gesteuert wird! Feuer!))Zunächst habe ich gegoogelt und die auf dem internationalen Markt verfügbaren Angebote untersucht: PadBot (China), BotEyes (Russland), Double Robotics (USA), Webot (Russland), OrigiBot (USA), Oculus (Kanada), Anybot (USA), RBOT Synergy (Russland) und erstellte eine Tabelle mit Vergleichsmerkmalen von Robotern. Roboter unterschieden sich in ihrer Funktionalität: Die Fähigkeit, Gegenstände mit einem Manipulator (eine Dose Bier aus dem Kühlschrank :) zu nehmen, hohe Hindernisse zu überwinden, autonom aufzuladen usw. Natürlich schwebte der Preis zwischen 1.000 und 10.000 US-Dollar. In der Folge wurde mir klar, dass kostengünstige Geräte bis zu 5.000 US-Dollar Roboterplattformen sind, die von einem menschlichen Bediener gesteuert werden, aber überhaupt keine autonomen Roboter, die in einer sich ändernden Umgebung unabhängig Entscheidungen treffen können: Annäherung an ein Hindernis, Fahren auf einer Route von Punkt A nach Punkt B, Erkennung von Sprachbefehlen.Unser Endurance Robots-Team hat beschlossen, in den Markt für Economy-Class-Plattformen bis zu 2000 US-Dollar einzusteigen. Anhand der Tabelle der Vergleichseigenschaften habe ich zunächst die Eigenschaften des Geräts ermittelt, die erreicht werden müssen: Batterielebensdauer (ab 8 Stunden, ein ganzer Arbeitstag), Überwindung von Hindernissen (bis zu 3,5 Zentimeter hoch, Vordertürschwelle), zuverlässige Übertragung Steuerbefehle über das Internet, hochwertige Video- und Audiokommunikation. Ein Teilnehmer des Projekts bestand darauf, aus einer weiblichen Schaufensterpuppe einen Roboterkörper herzustellen und eine Tablette zwischen den Brüsten zu installieren. Wir haben sogar einen gebrauchten Oberkörper ohne Arme, Beine und Kopf für 2 US-Dollar gekauft (ein vollwertiges neues Mannequin kostet ~ 100 US-Dollar), aber aufgrund eines begrenzten Budgets ist diese Idee schließlich gestorben.Dies muss in erster Linie erreicht werden, nämlich: Akkulaufzeit (ab 8 Stunden, ein ganzer Arbeitstag), Überwindung von Hindernissen (bis zu 3,5 Zentimeter hoch, Schwelle der Vordertür), zuverlässige Übertragung von Steuerbefehlen über das Internet, qualitativ hochwertiges Video und Audiokommunikation. Ein Teilnehmer des Projekts bestand darauf, aus einer weiblichen Schaufensterpuppe einen Roboterkörper herzustellen und eine Tablette zwischen den Brüsten zu installieren. Wir haben sogar einen gebrauchten Oberkörper ohne Arme, Beine und Kopf für 2 US-Dollar gekauft (ein vollwertiges neues Mannequin kostet ~ 100 US-Dollar), aber aufgrund eines begrenzten Budgets ist diese Idee schließlich gestorben.Dies muss in erster Linie erreicht werden, nämlich: Akkulaufzeit (ab 8 Stunden, ein ganzer Arbeitstag), Überwindung von Hindernissen (bis zu 3,5 Zentimeter hoch, Schwelle der Vordertür), zuverlässige Übertragung von Steuerbefehlen über das Internet, qualitativ hochwertiges Video und Audiokommunikation. Ein Teilnehmer des Projekts bestand darauf, aus einer weiblichen Schaufensterpuppe einen Roboterkörper herzustellen und eine Tablette zwischen den Brüsten zu installieren. Wir haben sogar einen gebrauchten Oberkörper ohne Arme, Beine und Kopf für 2 US-Dollar gekauft (ein vollwertiges neues Mannequin kostet ~ 100 US-Dollar), aber aufgrund eines begrenzten Budgets ist diese Idee schließlich gestorben.Ein Teilnehmer des Projekts bestand darauf, aus einer weiblichen Schaufensterpuppe einen Roboterkörper herzustellen und eine Tablette zwischen den Brüsten zu installieren. Wir haben sogar einen gebrauchten Oberkörper ohne Arme, Beine und Kopf für 2 US-Dollar gekauft (ein vollwertiges neues Mannequin kostet ~ 100 US-Dollar), aber aufgrund eines begrenzten Budgets ist diese Idee schließlich gestorben.Ein Teilnehmer des Projekts bestand darauf, aus einer weiblichen Schaufensterpuppe einen Roboterkörper herzustellen und eine Tablette zwischen den Brüsten zu installieren. Wir haben sogar einen gebrauchten Oberkörper ohne Arme, Beine und Kopf für 2 US-Dollar gekauft (ein vollwertiges neues Mannequin kostet ~ 100 US-Dollar), aber aufgrund eines begrenzten Budgets ist diese Idee schließlich gestorben. Beim Testen der Nachfrage wurde deutlich, dass die Menschen nicht nur nach einem Tablet auf Rädern suchen, sondern nach einer Roboterplattform, die menschliche intellektuelle Aufgaben ausführen kann: Objekte und Sprache erkennen (Open-Source-OpenCV-Technologie), Fragen richtig beantworten (KI), Um die Route zum Motiv zu überwinden, erfassen Sie das Motiv und übertragen Sie es zum Ziel. Das heißt, der Radstand ist nicht der Hauptstand, sondern eine notwendige Ergänzung zu unserem Angebot. Strategisch bleibt der Radstand der Hauptformfaktor. Analog dazu ein Laptop -> Tablet. Das heißt, Eine neue Form ist ein neues Produkt.
Beim Testen der Nachfrage wurde deutlich, dass die Menschen nicht nur nach einem Tablet auf Rädern suchen, sondern nach einer Roboterplattform, die menschliche intellektuelle Aufgaben ausführen kann: Objekte und Sprache erkennen (Open-Source-OpenCV-Technologie), Fragen richtig beantworten (KI), Um die Route zum Motiv zu überwinden, erfassen Sie das Motiv und übertragen Sie es zum Ziel. Das heißt, der Radstand ist nicht der Hauptstand, sondern eine notwendige Ergänzung zu unserem Angebot. Strategisch bleibt der Radstand der Hauptformfaktor. Analog dazu ein Laptop -> Tablet. Das heißt, Eine neue Form ist ein neues Produkt. Die Aufgabe in der ersten Phase besteht darin, einen Radstand zu entwickeln: kostengünstig (nicht mehr als 200 US-Dollar für die Produktion in kleinem Maßstab), effizient (was sich zuverlässig bewegen lässt, modular aufgebaut ist und schnell repariert werden kann), einfach (ähnlich wie das Telefon installiert, die Anwendung heruntergeladen und das System funktioniert ), zuverlässig (Software, Hardware), die in Zukunft verbessert werden kann. Der Bediener muss in der Lage sein, über das Internet Signale an Elektromotoren und Servos zu senden.Also, GRUNDLEGENDE PRINZIPIEN eines Designs.- Die Vielseitigkeit der Plattform a la "Geländewagen" wird nicht verfolgt. Umgebungsmodell = Innen. Die Oberfläche ist flach (Laminat, Fliesen, Holz, Beton, Linoleum), Hindernisse bis zu 1 cm.- Priorität in der folgenden Reihenfolge: Attraktivität, Ergonomie und Einfachheit, Mobilität.- Erstellung eines Prototyps für die industrielle Produktion.- Zuverlässigkeit im täglichen Betrieb (1 Jahr)- Austauschbarkeit oder Komplementarität (wo befindet sich ein zweiter Lautsprecher oder eine zweite Kamera).- Die Vielseitigkeit von Verbindungselementen.- Geradlinige Bewegung, keine Zickzackbewegung.- Geräusche und Vibrationen unter 10 Dezibel.- Zusammenlegbarkeit und einfache Konstruktion für den Transfer von einem Gebäude in ein anderes.
Die Aufgabe in der ersten Phase besteht darin, einen Radstand zu entwickeln: kostengünstig (nicht mehr als 200 US-Dollar für die Produktion in kleinem Maßstab), effizient (was sich zuverlässig bewegen lässt, modular aufgebaut ist und schnell repariert werden kann), einfach (ähnlich wie das Telefon installiert, die Anwendung heruntergeladen und das System funktioniert ), zuverlässig (Software, Hardware), die in Zukunft verbessert werden kann. Der Bediener muss in der Lage sein, über das Internet Signale an Elektromotoren und Servos zu senden.Also, GRUNDLEGENDE PRINZIPIEN eines Designs.- Die Vielseitigkeit der Plattform a la "Geländewagen" wird nicht verfolgt. Umgebungsmodell = Innen. Die Oberfläche ist flach (Laminat, Fliesen, Holz, Beton, Linoleum), Hindernisse bis zu 1 cm.- Priorität in der folgenden Reihenfolge: Attraktivität, Ergonomie und Einfachheit, Mobilität.- Erstellung eines Prototyps für die industrielle Produktion.- Zuverlässigkeit im täglichen Betrieb (1 Jahr)- Austauschbarkeit oder Komplementarität (wo befindet sich ein zweiter Lautsprecher oder eine zweite Kamera).- Die Vielseitigkeit von Verbindungselementen.- Geradlinige Bewegung, keine Zickzackbewegung.- Geräusche und Vibrationen unter 10 Dezibel.- Zusammenlegbarkeit und einfache Konstruktion für den Transfer von einem Gebäude in ein anderes. TECHNISCHE EIGENSCHAFTEN eines Entwurfs.- Höchstgeschwindigkeit bis zu 3 km / h.- Die Höhe der Oberkante des Bildschirms beträgt ~ 1,5 m (vorzugsweise mit der Möglichkeit, von 1,2 m auf 1,8 m zu wechseln).- Wie viele kg sind in einer Höhe von 180 cm? Tablette + Wiege + zwei Servos. Ist das Dreiraddesign mit den ausgewählten Batterien an den Seiten stabil, wenn Sie mit einem oder zwei Rädern auf ein 3,5-cm-Hindernis treffen?Und dann fielen eine Million Fragen ... Welche Größe Räder? Welches Material?
TECHNISCHE EIGENSCHAFTEN eines Entwurfs.- Höchstgeschwindigkeit bis zu 3 km / h.- Die Höhe der Oberkante des Bildschirms beträgt ~ 1,5 m (vorzugsweise mit der Möglichkeit, von 1,2 m auf 1,8 m zu wechseln).- Wie viele kg sind in einer Höhe von 180 cm? Tablette + Wiege + zwei Servos. Ist das Dreiraddesign mit den ausgewählten Batterien an den Seiten stabil, wenn Sie mit einem oder zwei Rädern auf ein 3,5-cm-Hindernis treffen?Und dann fielen eine Million Fragen ... Welche Größe Räder? Welches Material? Welcher Typ: Omni, glatt, mit tiefem Profil?
Welcher Typ: Omni, glatt, mit tiefem Profil? Wie viele Räder: drei oder vier? Wie auf dem Schacht pflanzen?
Wie viele Räder: drei oder vier? Wie auf dem Schacht pflanzen? Zum Getriebe oder zur Motorwelle?
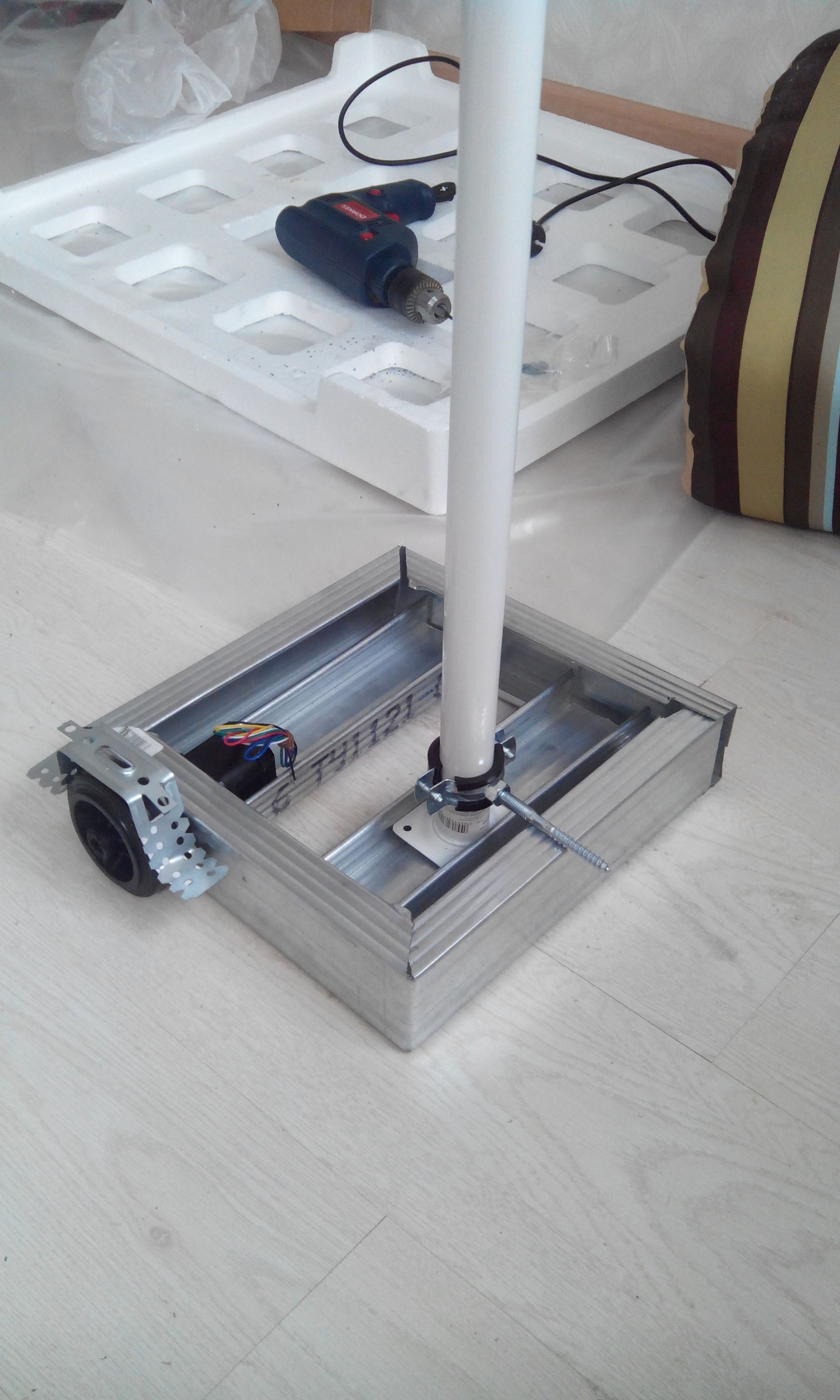
Zum Getriebe oder zur Motorwelle? Welchen Motor soll man wählen: Sammler, bürstenlos, Schritt? Aus welchem Material soll der Rahmen hergestellt werden? Als Ergebnis habe ich den ersten Prototyp leicht zugänglicher Materialien hergestellt, die in einem Baumarkt verkauft werden: 3 Räder (zwei führende und ein drehbarer), ein Rahmen aus dünnem U-förmigem Aluminiumprofil, selbstschneidende Schrauben und Bolzen, 2 Schrittmotoren.
Welchen Motor soll man wählen: Sammler, bürstenlos, Schritt? Aus welchem Material soll der Rahmen hergestellt werden? Als Ergebnis habe ich den ersten Prototyp leicht zugänglicher Materialien hergestellt, die in einem Baumarkt verkauft werden: 3 Räder (zwei führende und ein drehbarer), ein Rahmen aus dünnem U-förmigem Aluminiumprofil, selbstschneidende Schrauben und Bolzen, 2 Schrittmotoren.
 Die Hauptsache ist, dass dieser Prototyp seine Mission erfüllt hat: unserer Schaltung Andrei zum Testen der Elektronik auf und ab zu dienen.In diesem Artikel habe ich den Beginn unserer langen Reise beschrieben. Amateurprodukte und Fotografien. In den folgenden Abschnitten werde ich jedoch einen professionelleren Ansatz zeigen:Das Layout der Elemente Mechanik und Elektronik, auf das wir uns konzentriert haben:
Die Hauptsache ist, dass dieser Prototyp seine Mission erfüllt hat: unserer Schaltung Andrei zum Testen der Elektronik auf und ab zu dienen.In diesem Artikel habe ich den Beginn unserer langen Reise beschrieben. Amateurprodukte und Fotografien. In den folgenden Abschnitten werde ich jedoch einen professionelleren Ansatz zeigen:Das Layout der Elemente Mechanik und Elektronik, auf das wir uns konzentriert haben: Fortsetzung des Artikels hier: „Fortsetzung. Teil 1.2. Wie ich einen Telepräsenzroboter auf einem Radstand zusammenbaue. “ Ausdauerroboter & Lasertechnologie
Fortsetzung des Artikels hier: „Fortsetzung. Teil 1.2. Wie ich einen Telepräsenzroboter auf einem Radstand zusammenbaue. “ Ausdauerroboter & Lasertechnologie Source: https://habr.com/ru/post/de395507/
All Articles